1. Introduction
In recent years, one notes an increasing need for varieties of lifetime distributions to make the wealth of life models available for nicely fitting life lengths. These models are utilized for many products, systems, and reliability operations such as replacement and maintenance. In addition, reliability analysis requires the study of failure rates, mean residual life, and other aging properties of the product, which heavily depend on the form of the underlying model. Furthermore, the generalization would significantly increase the life models available for testing and fitting real-life data sets for biological, engineering, actuarial, medical, and other fields of life. It is known that appropriate modeling of data may provide a deeper insight of data, which shows its characteristics and makes its asymptotic behavior traceable (cf. Tobias [
1], Wolstenholme [
2], Schwartz [
3] and McPherson [
4]). In this context, many authors have proposed some generalizations of Lindley [
5], whose probability density function (pdf) is given by
It is a mixture of two gamma distributions
and
, respectively, with weights
and
. The cumulative distribution function (CDF) of Lindley is
The Lindley model was used to analyze failure rate data and stress-strength reliability models. This distribution and its other generalizations lie on the recent developments of new flexible families and provide great flexibility in modeling lifetime data, see for example Ghitany et al. [
6,
7], Bakouch et al. [
8], Abouammoh et al. [
9] and Cakmakyapan and Ozel [
10].
One important drawback of the Lindley model is that it is not scale invariant. One distribution family
is said to be scale invariant if by changing
x to
,
, the family does not change. So, changing the scale or units of
x leaves the fit invariant. Shanker and Mishra [
11] introduced one quasi Lindley model that is scale invariant.
In this paper, we consider scale invariant generalizations of the Lindley distribution that utilize some changes of the mixing weights, which give more flexibility to the mixed distributions. The plan of this paper is as follows.
Section 2 gives a generalization of the Lindley model based on the change of the weight parameters and some of its main statistical and reliability properties are investigated. In addition, in that section, the special cases that yield some earlier proposed models in the literature are explored. Then, another extension has been introduced and its main properties are discussed. In
Section 3, estimating the parameter(s) of the proposed model has been studied. In
Section 4, the results of a simulation study have been briefly presented. In
Section 5, the proposed models have been utilized to fit some real lifetime data sets. Finally, in
Section 6, we give a brief conclusion and some remarks on the current and future of this research.
2. Generalization Based on Mixing Weights
In the literature, one direct generalization of the Lindley distribution is to consider different values for mixing weights. In this context, we propose a relatively similar, but new and comprehensive approach to introduce a series of general distributions.
Definition 1. The non-negative random variable X is said to follow the Abouammoh–Kayid model with parameters α, β, δ and θ, abbreviated by , when its PDF is given bywhich is a mixture of the gamma distributions and with weights and , respectively. The CDF of this model is
where
shows the upper incomplete function. When
,
and
,
reduces to the well-known Lindley model.
Proposition 1. If , then its kth moment is given by Proof. We have
which shows the result. □
By setting
and 2 in Proposition 1, the mean and variance of the distribution can be computed directly. The moment generating function of
has the following closed form:
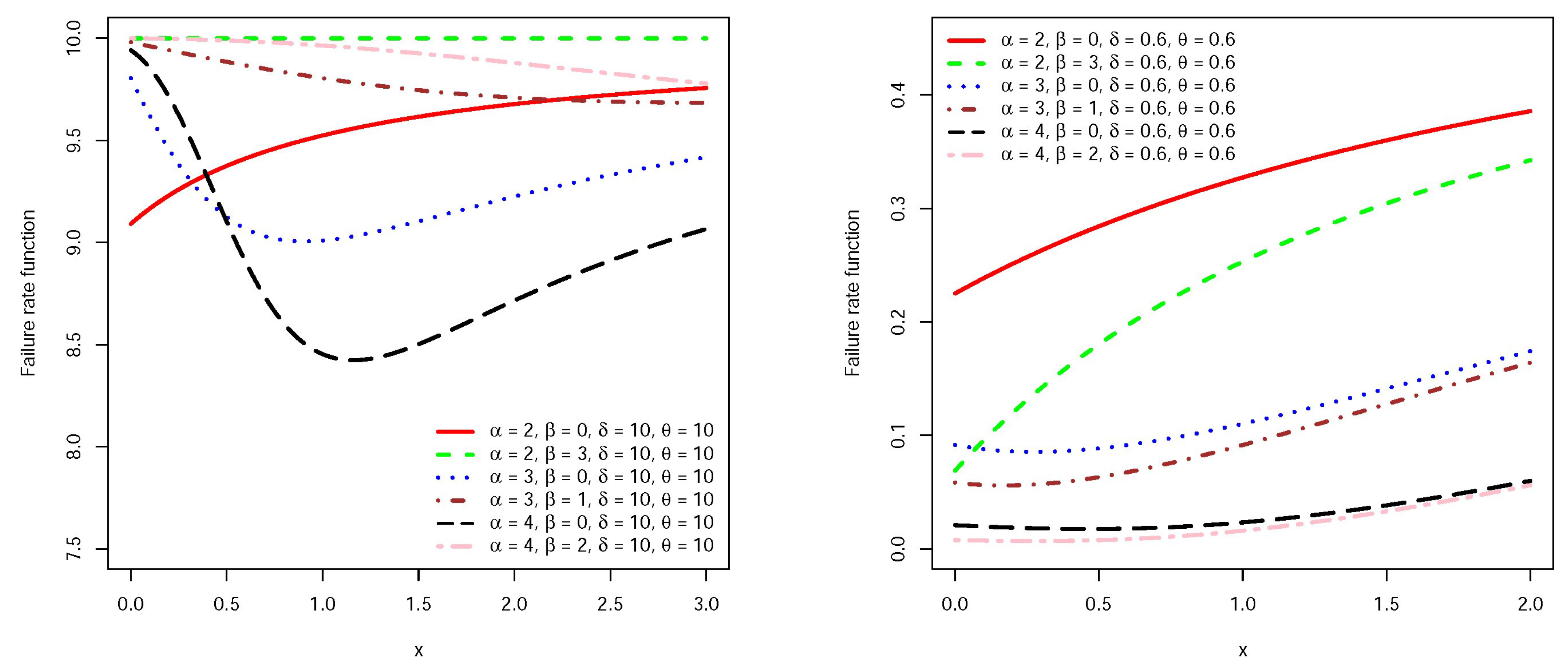
The failure rate function can be simplified to
Figure 1 and
Figure 2 present the graphs of density and failure rate functions for the
random variables for some values of parameters. The shape of the failure rate function is useful in describing the lifetime model, for example, when we have an instrument/creature that deteriorates with time we expect that its corresponding failure rate function will be increasing. Similarly, a bathtub shaped failure rate function may be useful for modeling the lifetime of an object that is very fragile at the beginning of its life, one may refer to Lai and Xie [
12] for more details.
Figure 2 reveals that the failure rate function accommodates increasing, decreasing and bathtub shape. It seems that for larger values of
, the density function has a thicker tail.
The concept of mean residual life (MRL) plays an important role in reliability and life testing. The next proposition provides the MRL of .
Proposition 2. If , then its MRL is given by Proof. First, the MRL is given by
where
is the reliability function. However, we have
It is straightforward to show that the first integral inside parentheses reduces to
. However, the second integral can be simplified by some algebra as follows:
The last equation in (11), follows from the fact that . Appealing to (10) and (11), the required result follows. □
2.1. Some Special Cases of
In this subsection, we derive some special cases of the for various values of the parameters that have been introduced in the literature. In the special case , the following more special cases have been studied in the literature.
- Case 1.
For and , reduces to the well-known Lindley model.
- Case 2.
When
and
, it reduces to the Akash distribution proposed and studied by Shanker [
13].
- Case 3.
For
and
, we have the Prakaamy distribution, which was introduced and discussed by Shukla [
14].
- Case 4.
For
and
, it reduces to the Shanker distribution, which was proposed and studied by Shanker [
15].
- Case 5.
For
and
, it is the Isheta distribution introduced and studied by Shanker and Shukla [
16].
- Case 6.
For
and
, it reduces to the Pranav distribution proposed by Shukla [
17].
- Case 7.
For
and
, we have the Ram Awadh distribution, which was introduced and discussed by Shukla [
18].
One can verify that all statistical and reliability properties of these special cases can be obtained from the corresponding property of by utilizing appropriate values for and .
2.2. Power Generalization
Many generalizations of the well-known Lindley [
5] distribution are special cases of
family. Here we propose a new model that extends
.
Definition 2. A non-negative random variable X is said to have the power distribution, denoted by , if its PDF is given by Note that if
then
. This statement is useful for studying the statistical and reliability properties of this extended model. The corresponding CDF of the above density is
For
and
,
reduces to the well-known Weibull model with CDF
Proposition 3. Let , then, its kth moment is Proof. Let , then . Thus, . So, the result follows by (5) directly. □
The failure rate function of
is
3. Estimation of Parameters for the Complete and Right Censored Data
The proposed distributions (3) and (12) have four and five parameters, respectively, which makes the estimation process very complicated. To overcome the complexity, we assume two parameters and in a discrete subspace. In this way, we take and . We take a proper set of pairs and, for each pair, estimate the remaining parameters by moments or maximum likelihood methods. Then, we can choose the best based on the Kolmogorov–Smirnov (K-S) or similar statistics.
Let
,
be an independent and identically distributed (iid) random sample of
. For known (
,
), by (5), one estimator for (
,
) can be derived by solving the following system of equations in terms of
.
The second fraction in Equation (16), is greater than one, so one lower bound for the estimate of is . This bound can be very helpful in finding a solution of (16) or optimizing likelihood function and computing maximum likelihood estimation. It can be applied as a good initial point in maximizing the log-likelihood function.
Assume that
,
represents a realization of the mentioned random sample of
. The log-likelihood function of
, with known
, is
The score statistics can be obtained by differentiating of log-likelihood function in terms of
and
.
and
The maximum likelihood estimator (MLE) can be computed by maximizing (17) in terms of
, or by solving the equation
and
for (
,
). We apply the first approach in the next section to investigate the practical potential of MLE and study the behavior of this estimator by a simulation study. The log-likelihood function when
,
represents a realization of
, with known
and
, is
Let
represent a random lifetime, which is censored by a random variable
such that
is observed when
and otherwise all information about
is that it is greater than
. In this case
is said to be right censored by
. In other words, the observations consist of
and
, which equals 1 when
and 0 when
(cf. Fleming and Harrington [
19]). The log-likelihood of
(
) for censored data
and
,
is denoted by
and equal to
where
and
show pdf and reliability function of
(
), respectively.
4. Simulation Study
Generating random samples of can be obtained from the fact that the model is a mixture of two gamma distributions. In this way, we have the following steps:
Generate one sample of multinomial distribution with parameters v, and . Suppose that the generated instance be denoted by and , corresponding respectively to probabilities p and . Note that .
Simulate one sample from gamma model with size and another sample from with size . We merge these two samples to have one sample of with size v.
In cases where we need right censored samples, the uniform r.v. on an interval
has been considered as
. Given
p, the censorship percentage, we find
by solving the following equation in terms of
.
which can be solved numerically.
Table 1 presents the results of our simulation study for
distribution. Two censorship levels
(uncensored) and
(20 percent of instances have been censored) have been considered. In every run, we derive
replicates of samples of size
v. Then for every replicate, the MLE for
,
, has been computed by maximizing the log-likelihood function (21). In this order, from top to bottom, every cell consists of three measurements
,
and
where
and
and
,
and
are defined similarly. From
Table 1, some observations abstracted are listed here.
Absolute means of biases (), have greater values for censored samples.
() and () show smaller for larger sample size, v.
, and increase with and a similar statement holds for .
Table 2 gathers results of our simulation study for
. Similarly, we take two censorship levels
and
. In every run,
replicates of samples of size
v have been driven. Then, for every replicate,
, MLE for
, has been computed by maximizing log-likelihood Function (21). Every cell consist of three measurements
,
and
. The following observations have been listed from
Table 2.
are greater for censored samples.
and are smaller for larger sample size, v.
5. Applications
In this section, we analyze some real data sets to demonstrate the performance of the new model in practice. The first data set presented in
Table 3 reports 100 waiting times (in minutes) of customers to receive service in a bank. The data have been analyzed by Ghitany et al. [
20] and Shanker [
15]. For all pairs
where
and
,
has been fitted to this data set. Two prominent measures
, where
is the corresponding log-likelihood and
k shows the number of parameters, and K-S have been computed for every model. For more details about K-S statistics, we refer to Corder and Foreman [
21], and the references therein. Then we seek the models with minimum AIC and/or K-S statistics. In terms of AIC and K-S static/
p-value, the best model is
. The AIC, K-S statistic and its p-value are
,
and
, respectively. The small value of the statistic and great value (near one) of p-value show strong evidence in favor of the null hypothesis and indicate that this model describes the data very well.
Figure 3, left side, draws empirical CDF along with CDF of the fitted model
and graphically confirms a good fit.
As for the second data set, Fuller et al. [
22] and Shanker [
23] considered the strength of the glass of an aircraft window presented in
Table 4. To find a suitable model for describing this data set, we fit
for all pairs
where
and
to this data set. Then, we search for the model with the smallest AIC and/or K-S statistic and find
. The AIC, K-S statistic and its
p-value are
,
and
, respectively.
Figure 3, right side, shows the empirical CDF and fitted model
.
Finally, Smith and Naylor [
24] reported a data set of strength of 1.5 cm glass fibers presented in
Table 5. This data set has also been analyzed by Shukla and Shanker [
25]. Here we fit
to this data set for all pairs
where
and
. Based on the AIC and K-S statistic the best model among them is
. The AIC, K-S statistic and its related p-value are
,
and
, respectively. The empirical CDF and the CDF of
have been drawn in
Figure 4.
6. Conclusions
We have proposed a general extension of the Lindley model, namely, , that includes many of the previous extensions. Moreover, we have introduced its power version, . Unlike the Lindley model, these extensions are scale invariant. Several statistical and reliability properties of the proposed models have been presented. The maximum likelihood estimator of the parameters has been simulated and studied for complete and right-censored data. The efficiency and the behavior of estimate have been, as well, investigated by a simulation study. Some real data sets have been analyzed and the results show that the proposed models are very flexible and useful in applications. As the applications show, we can search among all and in a range and find the more suitable model. We hope that this model will be able to attract a wide spectrum practical studies in reliability engineering, survival analysis, and other fields of life. Further properties and applications of the new models can be considered in the future of this research. In particular, it is worth noting that when the Poisson parameter follows the , the model leads to an interesting discrete model that is flexible and compliant for modeling other discrete-valued life problems. This topic is interesting and open problems remain.
Author Contributions
Conceptualization, A.A.; investigation, A.A. and M.K.; methodology, A.A. and M.K.; project administration, M.K.; software, M.K.; supervision, A.A. and M.K.; writing—original draft, A.A. and M.K.; writing—review and editing, M.K. All authors have read and agreed to the published version of the manuscript.
Funding
This project was funded by the National Plan for Science, Technology, and Innovation (MAARIFAH), King Abdulaziz City for Science and Technology, Kingdom of Saudi Arabia, Award Number (14-MAT2052-02).
Acknowledgments
The authors are grateful to anonymous referees for their constructive comments that lead to an improvement in the quality of the paper. The authors would like to extend their sincere appreciation to the strategic technology program of the National Plan for Science, Technology and Innovation in the Kingdom of Saudi Arabia for its funding this project No. 14-MAT2052-02.
Conflicts of Interest
There are no conflict of interest.
References
- Tobias, P.A.; Trindade, D. Applied Reliability; CRC Press: Boca Raton, FL, USA, 2011; ISBN 9781584884668. [Google Scholar]
- Wolstenholme, L.C. Reliability Modelling: A Statistical Approach; Chapman and Hall/CRC: Boca Raton, FL, USA, 1999; ISBN 9781584880141. [Google Scholar]
- Schwartz, R. Biological Modeling and Simulation: A Survey of Practical Models, Algorithms, and Numerical Methods; MIT Press: Cambridge, MA, USA, 2008. [Google Scholar]
- McPherson, J.W. Reliability Physics and Engineering: Time-to-Failure Modeling; Springer US: New York, NY, USA, 2010; ISBN 978-1-4419-6348-2. [Google Scholar]
- Lindley, D.V. Fiducial distributions and Bayes’ theorem. J. R. Stat. Soc. Ser. B Methodol. 1958, 20, 102–107. [Google Scholar] [CrossRef]
- Ghitany, M.E.; Al-Mutairi, D.K.; Nadarajah, S. Zero-truncated Poisson-Lindley distribution and its application. Math. Comput. Simul. 2008, 79, 279–287. [Google Scholar] [CrossRef]
- Ghitany, M.E.; Al-Mutairi, D.K.; Awadhi, F.A.; Alburais, M. Marshall-Olkin extended Lindley distribution and its application. Int. J. Appl. Math. 2012, 25, 709–721. [Google Scholar]
- Bakouch, H.S.; Bander, M.A.; Al-Shaomrani, A.A. Marchi and F. Louzada, An extended Lindley distribution. J. Korean Stat. 2012, 41, 75–85. [Google Scholar] [CrossRef]
- Abouammoh, A.M.; Alshangiti Arwa, M.; Ragab, I.E. A new generalized Lindley distribution. J. Stat. Comput. Simul. 2015, 85, 3662–3678. [Google Scholar] [CrossRef]
- Cakmakyapan, S.; Ozel, G. The Lindley family of distributions: Properties an applications. Hacet. J. Math. Stat. 2017, 46, 1113–1137. [Google Scholar] [CrossRef]
- Shanker, R.; Mishra, A. A quasi Lindley distribution. Afr. J. Math. Comput. Sci. Res. 2013, 6, 64–71. [Google Scholar]
- Lai, C.D.; Xie, M. Stochastic Aging and Dependence for Reliability; Springer: New York, NY, USA, 2006; ISBN 978-0-387-29742-2. [Google Scholar]
- Shanker, R. Akash distribution and its applications. Int. J. Probab. Stat. 2015, 4, 65–75. [Google Scholar] [CrossRef]
- Shukla, K.K. Prakaamy distribution with properties and applications. JAQM 2018, 13, 30–38. [Google Scholar]
- Shanker, R. Shanker distribution and its applications. Int. J. Stat. Appl. 2015, 5, 338–348. [Google Scholar] [CrossRef]
- Shanker, R.; Shukla, K.K. Ishita distribution and its applications. Biom. Biostat. Int. J. 2017, 5, 39–46. [Google Scholar] [CrossRef]
- Shukla, K.K. Pranav distribution with properties and its applications. Biom. Biostat. Int. J. 2018, 7, 244–254. [Google Scholar] [CrossRef]
- Shukla, K.K. Ram Awadh distribution with properties and applications. Biom. Biostat. Int. J. 2018, 7, 515–523. [Google Scholar] [CrossRef]
- Fleming, T.R.; Harrington, D.P. Counting Processes and Survival Analysis; Wiley: Hoboken, NJ, USA, 2011; ISBN 978-1-118-15066-5. [Google Scholar]
- Ghitany, M.E.; Atieh, B.; Nadarajah, S. Lidley distribution and its application. Math. Comput. Simul. 2008, 78, 493–506. [Google Scholar] [CrossRef]
- Corder, G.W.; Foreman, D.I. Nonparametric Statistics: A Step-by-Step Approach, 2nd ed.; Wiley: Hoboken, NJ, USA, 2014; ISBN 978-1-118-84031-3. [Google Scholar]
- Fuller, E.J.; Frieman, S.; Quinn, J.; Quinn, G.; Carter, W. Fracture mechanics approach to the design of glass aircraft windows: A case study. SPIE Proc. 1994, 2286, 419–430. [Google Scholar]
- Shanker, R. On Generalized Lindley Distribution and Its Applications to Model Lifetime Data from Biomedical Science and Engineering. 2016. Available online: https://biomedicine.imedpub.com/on-generalized-lindley-distribution-and-its-applications-to-model-lifetime-data-from-biomedical-science-and-engineering.php?aid=17803 (accessed on 25 November 2016).
- Smith, R.L.; Naylor, J.C. A comparison of maximum likelihood and Bayesian estimators for the three parameter Weibull distribution. Appl. Stat. 1987, 36, 358–369. [Google Scholar] [CrossRef]
- Shukla, K.K.; Shanker, R. Power Prakaamy distribution and its applications. Int. J. Comp. Theo. Stat. 2020, 7. [Google Scholar] [CrossRef]
Figure 1.
Density function for for some , , and values.
Figure 1.
Density function for for some , , and values.
Figure 2.
Failure rate function of for some parameter values.
Figure 2.
Failure rate function of for some parameter values.
Figure 3.
(Left): Empirical and fitted for data set of Example 1. (Right): Empirical and fitted for data set of Example 2.
Figure 3.
(Left): Empirical and fitted for data set of Example 1. (Right): Empirical and fitted for data set of Example 2.
Figure 4.
Empirical and fitted for data set of Example 3.
Figure 4.
Empirical and fitted for data set of Example 3.
Table 1.
Simulation results for . Every cell consists of pairs , and from top to bottom.
Table 1.
Simulation results for . Every cell consists of pairs , and from top to bottom.
| | | |
|---|
| | | | | |
|---|
| 30 | (2,1) | (0.013000, −0.007520) | (0.013888, 0.001214) | (0.313307, −0.021339) | (0.458239, −0.000243) |
| (0.237531, 0.145039) | (0.376828, 0.006787) | (0.541801, 0.164034) | (0.821119, 0.007860) |
| (0.092244, 0.034001) | (1.440460, 0.000074) | (7.131440, 0.057312) | (7.109937, 0.000109) |
| (3,2) | (−0.044634, -.004039) | (−0.190346, 0.000018) | (−0.045337, −0.007946) | (−0.163909, −0.000265) |
| (0.239059, 0.105796) | (0.326939, 0.004271) | (0.234000, 0.111629) | (0.355852, 0.005062) |
| (0.089102, 0.018373) | (0.116500, 0.000029) | (0.066341, 0.019126) | (0.631660, 0.000043) |
| 50 | (2,1) | (−0.010284, 0.005392) | (−0.045135, 0.000987) | (0.030007, −0.004096) | (0.07146, −0.000103) |
| (0.195604, 0.109608) | (0.244568, 0.005464) | (0.248331, 0.119299) | (0.363505, 0.005866) |
| (0.055114, 0.019733) | (0.109090, 0.000048) | (0.977620, 0.023694) | (2.245982, 0.000057) |
| (3,2) | (−0.049990, −0.002405) | (−0.187037, 0.000247) | (−0.054677, −0.006306) | (−0.176889, −0.000140) |
| (0.222270, 0.078619) | (0.301444, 0.003425) | (0.221826, 0.088594) | (0.301239, 0.003759) |
| (0.056555, 0.009928) | (0.103816, 0.000018) | (0.058013, 0.012358) | (0.103287, 0.000022) |
Table 2.
Simulation results for . Every cell consists of pairs , and from top to bottom.
Table 2.
Simulation results for . Every cell consists of pairs , and from top to bottom.
| | | |
|---|
| | | |
|---|
| 50 | 1.2 | (0.042585, −0.140304, 0.144448) | (0.026979, −0.144273, 0.163527) |
| (0.308414, 0.224418, 0.201279) | (0.318815, 0.227539, 0.229853) |
| (0.182252, 0.111292, 0.116385) | (0.156089, 0.109475, 0.142901) |
| 1.5 | (−0.027510, −0.091166, 0.121848) | (−0.034820, −0.098860, 0.144941) |
| (0.258734, 0.175948, 0.191544) | (0.260512, 0.191275, 0.239627) |
| (0.106731, 0.066488, 0.104755) | (0.117548, 0.077079, 0.143252) |
| 80 | 1.2 | (−0.003004, −0.086247, 0.093759) | (−0.010993, −0.101056, 0.106659) |
| (0.262675, 0.159261, 0.142750) | (0.262216, 0.173366, 0.170353) |
| (0.114639, 0.061799, 0.069339) | (0.112765, 0.071323, 0.090398) |
| 1.5 | (−0.044956, −0.047861, 0.069793) | (−0.049756, −0.076235, 0.109912) |
| (0.236456, 0.138523, 0.144182) | (0.240175, 0.156068, 0.191108) |
| (0.081771, 0.043508, 0.067589) | (0.083860, 0.053685, 0.108493) |
Table 3.
Waiting times (in minutes) of customers to receive service in a bank.
Table 3.
Waiting times (in minutes) of customers to receive service in a bank.
| 0.8 | 0.8 | 1.3 | 1.5 | 1.8 | 1.9 | 1.9 | 2.1 | 2.6 | 2.7 |
| 2.9 | 3.1 | 3.2 | 3.3 | 3.5 | 3.6 | 4.0 | 4.1 | 4.2 | 4.2 |
| 4.3 | 4.3 | 4.4 | 4.4 | 4.6 | 4.7 | 4.7 | 4.8 | 4.9 | 4.9 |
| 5.0 | 5.3 | 5.5 | 5.7 | 5.7 | 6.1 | 6.2 | 6.2 | 6.2 | 6.3 |
| 6.7 | 6.9 | 7.1 | 7.1 | 7.1 | 7.1 | 7.4 | 7.6 | 7.7 | 8.0 |
| 8.2 | 8.6 | 8.6 | 8.6 | 8.8 | 8.8 | 8.9 | 8.9 | 9.5 | 9.6 |
| 9.7 | 9.8 | 10.7 | 10.9 | 11.0 | 11.0 | 11.1 | 11.2 | 11.2 | 11.5 |
| 11.9 | 12.4 | 12.5 | 12.9 | 13.0 | 13.1 | 13.3 | 13.6 | 13.7 | 13.9 |
| 14.1 | 15.4 | 15.4 | 17.3 | 17.3 | 18.1 | 18.2 | 18.4 | 18.9 | 19.0 |
| 19.9 | 20.6 | 21.3 | 21.4 | 21.9 | 23.0 | 27.0 | 31.6 | 33.1 | 38.5 |
Table 4.
Strength of glass of aircraft window, reported by Fuller [
22].
Table 4.
Strength of glass of aircraft window, reported by Fuller [
22].
| 18.83 | 20.8 | 21.657 | 23.03 | 23.23 | 24.05 | 24.321 | 25.5 | 25.52 | 25.8 | 26.69 |
| 26.77 | 26.78 | 27.05 | 27.67 | 29.9 | 31.11 | 33.2 | 33.73 | 33.76 | 33.89 | 34.76 |
| 35.75 | 35.91 | 36.98 | 37.08 | 37.09 | 39.58 | 44.045 | 45.29 | 45.381 | | |
Table 5.
Strength of 1.5 cm glass fibers, analyzed in Example 3.
Table 5.
Strength of 1.5 cm glass fibers, analyzed in Example 3.
| 0.55 | 0.93 | 1.25 | 1.36 | 1.49 | 1.52 | 1.58 | 1.61 | 1.64 | 1.68 | 1.73 |
| 1.81 | 2.00 | 0.74 | 1.04 | 1.27 | 1.39 | 1.49 | 1.53 | 1.59 | 1.61 | 1.66 |
| 1.68 | 1.76 | 1.82 | 2.01 | 0.77 | 1.11 | 1.28 | 1.42 | 1.50 | 1.54 | 1.60 |
| 1.62 | 1.66 | 1.69 | 1.76 | 1.84 | 2.24 | 0.81 | 1.13 | 1.29 | 1.48 | 1.50 |
| 1.55 | 1.61 | 1.62 | 1.66 | 1.70 | 1.77 | 1.84 | 0.84 | 1.24 | 1.30 | 1.48 |
| 1.51 | 1.55 | 1.61 | 1.63 | 1.67 | 1.70 | 1.78 | 1.89 | | | |
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).








{kind=link}
{kind=link}
{kind=link}
{kind=link}