1. Introduction
Consider equation
where
u is a scalar function, parameters
,
T, and
are positive,
is some nonlinear compactly supported function. This equation is a mathematical model in problems of radiophysics and biology. It simulates a generator with nonlinear delayed feedback with a first-order RC low-pass filter (see, for example, [
1,
2,
3]). Such generators are used in the manufacture of sonars, noise radars, and D-amplifiers [
2]. Equation (
1) models a biological process where the single state variable
u decays with a rate
proportional to
u in the present and is produced with a rate dependent on the value of
u some time in the past [
4]. Such processes arise in a variety of problems in various areas in biology (see Table 1 and references in [
4]). In addition, the dynamics of Equation (
1) is of general scientific interest [
5,
6,
7,
8,
9,
10,
11,
12,
13]. The authors find complicated periodic solutions [
5,
6,
7] and chaos [
8] in this model in the case of “step-like” nonlinearity. In Ref. [
9], authors study properties of solutions and find a global attractor of model (
1) with delayed positive feedback and in the paper [
10] existence and stability of relaxation cycle of the multidimensional system (
1) in the case of large
is studied. In Refs. [
11,
12,
13], the authors study properties of solutions of normalized Equation (
1) (parameters
) in the case of sufficiently large
T. They deal with equation
where
and study how the dynamics of this equation when
is small (when
T is large in (
1)) is related with dynamics of this equation in the case
.
In this paper, we deal with a system of two coupled normalized (
) equations of the form (
1)
Here, delay time
T is a positive constant, a nonlinear sufficiently smooth function
is compactly supported:
where
p is some positive constant.
We assume that function
on the segment
satisfies the conditions:
and that coefficient
is large enough:
.
This model simulates two coupled
D-amplifiers or two noise-radars with a large amount of feedback. If coupling parameter
is asymptotically small at
, then exponentially orbitally stable relaxation cycles coexist in model (
3) (see [
14,
15]). Now, we are interested in nonlocal dynamics of this model in the case
is some nonzero constant and we study how the dynamic properties of the system differ in the cases of positive and negative coupling.
The paper is organized as follows. In
Section 2, we introduce some set of initial conditions and integrating by steps system (
3) under some non-degeneracy conditions we construct solutions with initial conditions from the chosen set. By formulas of solution, we obtain the operator of translation along the trajectories
and map describing dynamics of this operator. Using this map, we clarify asymptotics of solutions of system (
3) in the case
in
Section 3 and in the case
in
Section 4. In
Section 5, as an example, we consider a narrower class of functions
f and prove that asymptotic formulas of solution given in
Section 2,
Section 3 and
Section 4 are valid for a wide set of initial conditions (for all initial conditions from this set, non-degeneracy conditions hold) and prove the existence of relaxation cycles in system (3). We show that the dynamics of system (
3) is significantly different in the case of positive and negative coupling in
Section 6 and, in
Section 7, we draw conclusions.
2. Constructing the Asymptotics of Solutions
Let’s find relaxation solutions of (
3) and study the dynamics of this system. For this purpose, we consider initial conditions
outside of the strip
(
,
) and construct asymptotics of all solutions of system (
3) for this set of initial conditions.
Due to the choice of initial conditions on the segment
, system (
3) has the form
Moreover, system (
3) has form (
5) until at least one of the components of the solution comes into the strip
. Thus, for
, until at least one of the components of the solution of system (
3) for the first time comes into the strip
, a solution of system (
3) has form
It follows from (
6) that, in the case
, there exist solutions of system (
3) tending to infinity, and, in the case
, there exist solutions of system (
3) tending to a constant at
. We are interested in relaxation solutions, which is why we assume further that
.
If
, then at least one component of a solution eventually comes into the strip
(
or 2). Let
be the first time moment such that some component of the solution (we denote it as
) gets inside the strip
:
and
if
(where
is some constant and
i equals 1 or 2). Then,
where
k denotes the sign of
(parameter
k takes values
or 1) and
x is some value such that
. We denote the set of pairs of initial functions
satisfying conditions (
7) and (
8) as
.
We will integrate system (
3) using a method of steps. It follows from (
7) that, on the first step (time segment
), system (
3) has form (
5) and the solution has a form
Since function
is inside the strip
for
, then, for
, we have that
is not identically equal to 0. In addition,
may be identically equal to 0 or not (it depends on value of
x). Then, on the second step (
), we consider system (
3) as an inhomogeneous system of ordinary differential equations (here functions
and
are known from the previous step and we consider them as inhomogeneity). Thus, the following formula for solution of system (
3) holds:
where
Let’s introduce the following conditions on the functions A and B:
Assumption 1. Number of points for which () is finite. If (), then there exists such that (, respectively).
Assumption 2. Inequality holds.
Under Assumption 2, we obtain that
at
and that both functions
and
at the point
are outside of the strip
.
Lemma 1. If Assumptions 1 and 2 hold, then on the segment functions and have the form Proof. Let
. On this segment, we consider system (
3) as a system of inhomogeneous linear ordinary differential equations (on this time segment we consider known functions
and
as inhomogeneity). Therefore, a solution of this system on the time segment
has the form of a sum of particular integral (PI) and complementary function (CF, solution of linear part of system (
3)–system (
5)) with constants determined from the initial conditions (
11):
Let’s find asymptotics of particular integral of this system at
. A particular integral of the system (
3) on the time segment
has the form
Suppose a particular integral (
13) is non-zero. This integral on some segment is non-zero only if functions
or
are non-zero on this segment. Function
(
) is non-zero only if
(
). For sufficiently large values of
this condition holds only if
(
respectively) is in the neighborhood of zero. Function
(
) is continuous; consequently, there exists point
such that
(
, respectively).
Consider the point
such that
. It follows from Assumption 1 that there exist
such that
. Let
q be the minimum from these numbers
j. Consequently, it follows from (
10) that, in the neighborhood of
, we have
Let’s estimate “time of living”
of function
in the strip
in the neighborhood of the point
(“time of living” means here length of the maximal interval of values
t such that
belongs to this segment and inequality
is true for all points
t from this segment). From (
14), under the condition that
is sufficiently large, we get that
, where
is some positive value. From Assumption 1, we know that number of points
such that
is finite, which is why there exists
—maximum from values
q for all points
. Then, on the whole segment
“time of living”
of function
in the strip
has estimate
, where
is some positive value. Similarly, for function
, we have estimate
, where
and
P are some positive values. Function
F is bounded, which is why, for a particular integral (
13), we have the following estimate:
where
M is some positive value,
.
A solution of linear part of system (
3) satisfying initial conditions (
11) on this segment has form
Thus, a complementary function gives us the leading term of asymptotics of solution of system (
3) on the segment
and thus a solution on this segment has form (
12). □
Corollary 1. The leading term of asymptotics of solution of system (3) coincides with solution of system (5) with initial conditions (11) on the segment . Let’s study asymptotics of solutions of system
(3) for values
. While both components of solution are outside of the strip
(
), system
(3) has form
(5) and solution has form
(12). If some component of solution comes to the strip
at the point
, then on the next step
nonlinearity
F is non-zero and the leading term of asymptotics of solution may change. Whether it changes or not is determined by the values of the functions
in the neighborhood of the point
.
Note that, in terms of functions
and
on the segment
, we have the following representation of functions
and
:
There exists two principally different cases when function (or ) comes into the strip at the point :
The second multiplier in Formula (
15) or Formula (
16) at some point from an asymptotically small at
neighborhood of the point
is equal to zero.
The second multiplier in Formulas (
15) and (
16) in some (independent from
) neighborhood of the point
is non-zero and the third multiplier is asymptotically small on
at
in the neighborhood of the point
.
Note that, for some functions F and values of parameters k, x, and , Case 1 does not take place. Suppose we have function F and values of parameters k, x, and such that this Case occurs. Then, we have the following Lemma.
Lemma 2. Suppose some component of solution comes into the strip at the point and Formula (12) is valid for the leading term of asymptotics of solution on the segment . If there exists a point from an asymptotically small at neighborhood of the point such that the second multiplier in (15) or (16) is equal to zero, then asymptotics of solution on the segment has form (12). Proof. First, note that, if the second multiplier in (
15) or (
16) is equal to zero at some point from the small neighborhood of the point
, then there exists value
such that
at
and
.
Each equation and has at most one root and, if one equation has a root, then another equation has no roots. This root does not depend on , and it follows from Assumption 2 that if (), then (, respectively).
Assume without loss of generality that function
comes into the strip
at the point
and
. Acting like in the proof of Lemma 1, we obtain that “time of living”
of function
in the strip
in the neighborhood of the point
has estimate
. This is why a particular integral of the system (
3) on the segment
has estimate
and a complementary function has estimate
where
and
.
Thus, on the segment
, Formula (
12) is valid. □
For the further reasoning, we need a notation of the time moment of leaving the strip in Case 1 (if this Case occurs). We denote it as . It follows from Lemma 2 that . If Case 1 does not take place, then we define . Thus, there exists a constant independent on such that
Lemma 2 implies the following statement.
Corollary 2. For all , both functions and are outside of the strip until Case 2 occurs.
Let’s study Case 2 in more detail.
First, consider the case
. If non-degeneracy condition
holds, then there exist positive constants
,
, such that
in some independent on
neighborhood of the point
. Therefore,
at
, where
is some positive constant. This is why
at
. In addition, in the neighborhood of the point
, solution of system (
3) has form
Consider the case
. If non-degeneracy condition
holds, then, for some positive constants
and
in some independent on
neighborhood of the point
, we have
Therefore, we obtain that
at
, where
is some positive constant. Consequently,
at
and in the neighborhood of the point
solution of system (
3) has form
From Formulas (
18) and (
21), we get that
. In addition, it follows from Formulas (
19) and (
22) that if
, then there exists
such that
for all
. Thus, there exists
(it is equal to
from the Case 2), such that
and
at
.
It follows from Lemmas 1 and 2, Corollaries 1 and 2 and from the reasoning given above that the next statement is true.
Corollary 3. On the time segment , a solution of system (3) has form (12). It follows from Formulas (
24) and (
25) that we obtain an operator of translation along the trajectories that map our set of initial conditions
to a set
. Thus, at the point
, we return to the initial situation with replacement
k,
x,
i, and
by
,
,
, and
. If we do the same steps as in this section and in all the next iterations, Assumptions 1 and 2 and non-degeneracy condition (
17) in the case
(non-degeneracy condition (
20) in the case
, respectively) hold (with new values
,
,
and replacing
with
(
)), then, from an operator of translation along the trajectories, we obtain a map on
,
, and
. This map determines dynamics of the system (
3) because on the segments
solution satisfies Formulas (
9), (
10) and (
12) with
,
,
,
.
In the next two sections, we construct an exact form of maps on
,
, and
in the case
(see
Section 3) and in the case
(see
Section 4) and using dynamical properties of these maps clarify asymptotics of solution on the intervals
(
).
3. Dynamics in the Case of the Positive Coupling
In this section, we construct a map on
,
, and
and make conclusions on dynamics of system (
3) in the case of positive coupling (
).
Define
and
as
where
. Suppose that
((
26) is condition (
17) with
,
,
) and Assumptions 1 and 2 hold for values
,
and
for all
. Then, acting like in
Section 2, we get that in the case of positive coupling values
and
have form
Thus, we obtain that, in the case
, values
(
) satisfy
at
.
From (
12) and (
27), we get that the mapping on
,
, and
has form
at
.
It follows from (
28) that we have
for all
under the condition that Assumptions 1 and 2 and inequality (
26) are fulfilled. Thus, starting from the second iteration Assumption 1 should be satisfied for parameters
,
, and
. Let’s formulate this assumption for these values of parameters
k,
x, and
. Functions
and
have form
In Assumption 1 value
, so, for each
n value,
is in the segment
. Since
then Assumption 1 for any
is the same (only
may change, but it takes two values only). Thus, if the following assumption holds, then Assumption 1 holds for all
Assumption 3. Number of points such that is finite. If , then there exists such that is non-zero. Here, or and Under Assumption 3, the asymptotics of the solution has form
on the time segments
, where
((
29) is Formula (
9) with
,
,
, and
). On the segments
, the main terms of asymptotics of solution is given by the formula
((
30) is Formula (
10) with
,
,
, and
, where functions
A and
B are rewritten in terms of function
h).
We assume that the following non-degeneracy condition holds:
(the fulfillment of this inequality guarantees that the Assumption 2 and (
26) are satisfied for all
).
Then, on the segments, a
solution satisfies equalities
at
((
32) is Formula (
12) with
,
,
, and
, where functions
A and
B are rewritten in terms of function
h).
Thus, we have the following theorem:
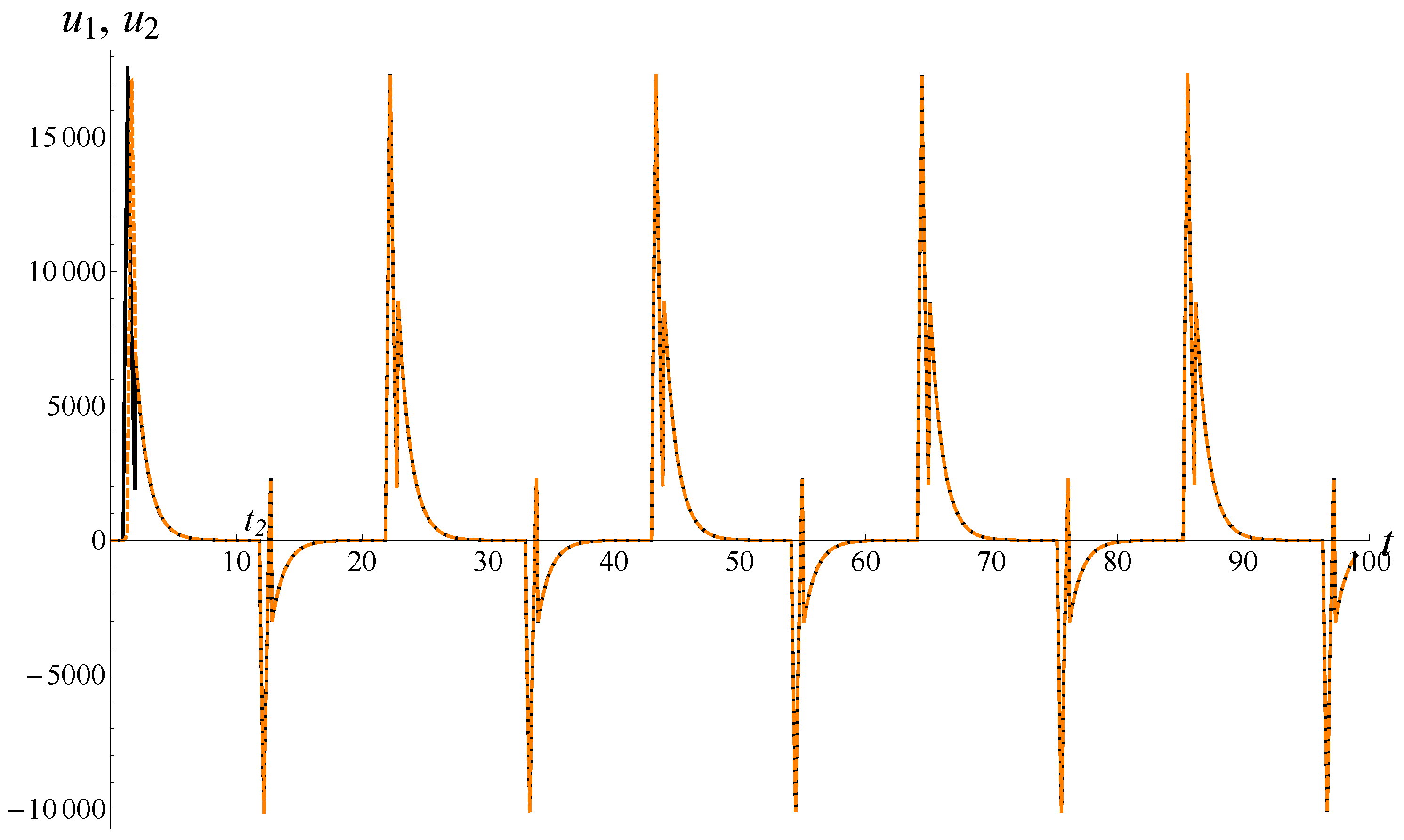
Theorem 1. Suppose and for values of and Assumptions 1, 2, and inequality (17) hold. Suppose Assumption 3 and inequality (31) hold. Then, for any sufficiently large , there exists such that for all solution of system (3) satisfies Formulas (29), (30), and (32). In
Figure 1, an example of a solution of system (
3) in the case of
is shown.
Since F is smooth and at , then, in the case , we have the following statement.
Corollary 4. Suppose and for values and Assumptions 1 and 2 hold and inequality (17) is true. Suppose Assumption 3 and inequality (31) are true. Then, for any sufficiently large , there exists such that for all inequality is true. 4. Dynamics in the Case of Negative Coupling
In this section, we assume that
. We construct map on
,
, and
for these values of
and make conclusions about dynamics of system (
3).
Suppose inequality
and Assumptions 1 and 2 for values
,
, and
hold for all
. Then, like in
Section 2, we obtain that, in the case
, values
and
have the form
Thus, we obtain that, in the case of negative coupling,
at
. It follows from (
12) and (
34) that the mapping on
,
, and
has form
at
.
Thus, under Assumptions 1, 2 and (
33) on the
n-th (where
) iteration of mapping, we have
at
. Thus, starting from the second iteration, Assumption 1 should be satisfied for
,
, and
. Let’s formulate this assumption for these values of parameters. Functions
and
have the form
Value
t in Assumption 1 on the
n-th iteration of steps described in
Section 2 is in the segment
; therefore, for each step value,
is in the segment
. Note that
and
Thus, for each , Assumption 1 is the same (only may change). Thus, if the following assumption holds, then Assumption 1 holds for all .
Assumption 4. Number of points such that () is finite. If (), then there exists such that (, respectively) is non-zero. Here, or and Thus, under Assumption 4, the asymptotics of the solution has form
on the segments
((
36) is Formula (
9) with
,
,
, and
). On the segments, the
solution satisfies equalities
((
37) is Formula (
10) with
,
,
, and
, where functions
A and
B are rewritten in terms of functions
and
).
Suppose that the following non-degeneracy condition holds:
(the fulfillment of these inequalities leads to fulfillment of Assumption 2 and inequality (
33) for all
). Thus, under condition (
38) on the segments
, we have the following asymptotics of solution:
((
39) is Formula (
12) with
,
,
, and
, where functions
A and
B are rewritten in terms of function
F).
We obtain the following result on dynamics of system (
3).
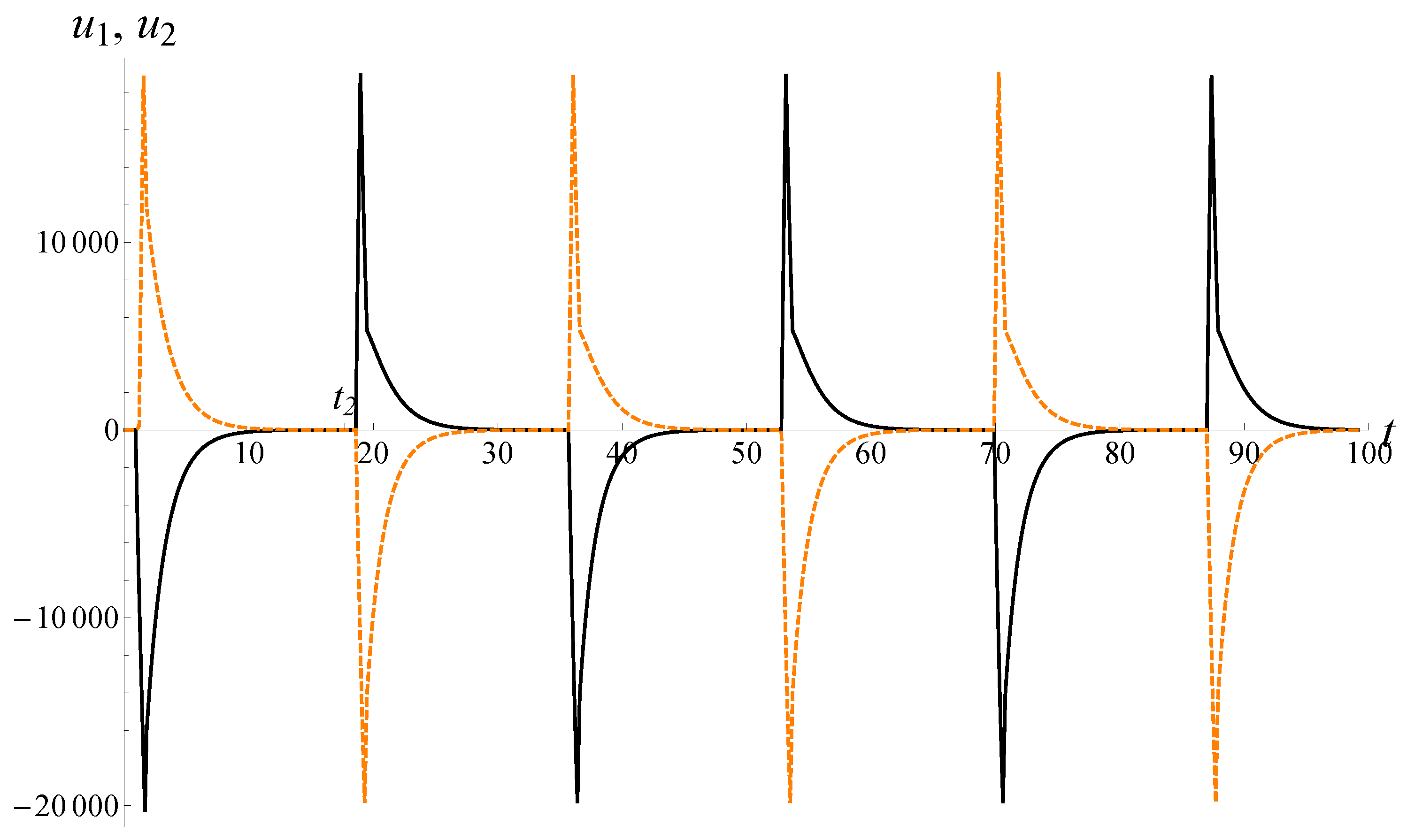
Theorem 2. Suppose and for values of and Assumptions 1, 2, and inequality (20) hold. Suppose Assumption 4 and inequalities (38) hold. Then, for any sufficiently large , there exists such that for all solution of system (3) satisfies Formulas (36), (37), and (39). In
Figure 2, an example of the solution in the case of
is shown.
5. Example
In this section, we show how method described in
Section 2,
Section 3 and
Section 4 works in the case when function
f satisfies conditions (
4) and inequality
and initial conditions satisfy inequalities
(here
k and
x are defined as in
Section 2).
As in
Section 2, we construct asymptotics of all solutions of system (
3) with initial conditions outside of the strip
(
) and satisfying inequality (
41). Let
and
i be defined as in
Section 2. Then, the following lemmas hold.
Lemma 3. If initial conditions fulfill (41), then functions and do not change their signs on the segment and for all inequalitieshold. Proof. Consider the case
. If
, then
. For these values of
k,
x, and
system of inequalities,
holds. Since
and
have form (
9),
and (
43) holds, then we get that
on the interval
. If
, then
. This is why we obtain that
It follows from (
9),
, and (
45) that
on the interval
.
Consider the case
. If
, then
. Then, from (
9),
, and (
43), we obtain that
on the interval
. In addition, in the case
, we get that
and from (
9),
, and (
45), we get
on the interval
.
It follows from (
44), (
46)–(
48) that inequalities (
42) hold. □
Lemma 4. If function comes into the strip at the point , then (1) x satisfies inequality(2) function is in the strip for all . Proof. It follows from (
9) that
therefore
Consider the case
. For
value,
is equal to
p. If this function comes into the strip
at the point
, then derivative
is non-positive. For
inequality,
is equivalent to
. It follows from condition (
41) that
in the case
. Thus, in the case
, inequality (
49) holds.
Consider the case
. For
value
and if this function comes into the strip
at the point
, then derivative
is non-negative. For
condition,
is equivalent to inequality
. From (
41), we get that
, so inequality (
49) is true in this case, too.
It follows from (
41) and (
49) that in the case
system of inequalities
holds and in the case
system of inequalities
is true on the interval
Using (
50)–(
52), and (
41), we obtain that
on the interval
. Combining (
44), (
46)–(
48) with (
53), we get that function
is in the strip
for all
. □
Lemma 5. If function f satisfies (4) and (40), initial conditions satisfy (41) andthen Assumptions 1–4 hold. Proof. Consider some function
, satisfying conditions (
4) and (
40).
Let us prove that for this function Assumption 1 holds. From Lemmas 3 and 4, we obtain that
is in the strip
and it does not change sign on the interval
. This is why from condition (
40) we get that the first summands in
and
are non-zero. Thus, from formulas (
44), (
46)–(
48), and assumption (
40), we obtain that the following inequalities hold
on the interval
. Thus, we have proved that under condition (
40) functions
and
are non-zero on the interval
. If
, then
. Derivatives
for
and derivatives
for
. Expressions
and
are non-zero: under condition (
54) last factor in these derivatives is non-zero and
because of (
4) (if
, then for all
expressions
and
equal zero). Consequently, Assumption 1 holds under condition (
54). This assumption holds for
at
, so Assumptions 3 and 4 hold.
Since the system of inequalities (
55) is true for
, then Assumption 2 holds. □
Note that if function
comes to the strip
, then
x satisfies inequality (
49), and for all
x such that (
54) hold, Assumption 1 is true. Thus, only for two values of parameter
is Assumption 1 false.
Lemma 6. If function f satisfies (4) and (40), then inequalities (26) and (31) are true in the case and inequalities (33) and (38) hold in the case . Proof. It follows from Lemma 5 that
and
have the same sign in the case
and the opposite signs in the case
. Therefore, in the case
(
) inequality (
26) (inequality (
33) respectively) holds for all
. Thus, inequalities (
31) and (
38) are fulfilled because they are equivalent to Assumption 2 and conditions (
26) and (
33) for
. □
Thus, we have proved that all assumptions in Theorems 1 and 2 are true if function
f satisfies (
4) and (
40) and for
conditions (
41) and (
54) hold. Therefore, for class of functions
f considered in this section, the following theorems are true.
Theorem 3. Suppose and inequalities (41) and hold. Then, for any sufficiently large there exists such that for all solution of system (3) satisfies Formulas (29), (30) and (32). Theorem 4. Suppose and inequalities (41) and hold. Then, for any sufficiently large there exists such that for all solution of system (3) satisfies Formulas (36), (37) and (39). Remark 1. If , then Assumption 1 is not true, so Theorems 3 and 4 are not proven. However, probably, they are true because for all initial conditions in the neighborhood of these values they are true.
Consider the map (
28). If we take set
(where
is a small positive constant (
)) of pairs
, then it follows from Lemmas 3–6 that the image of this set under the map (
28) is set
, where
at
. Therefore, there exists at least one fixed point of the operator of translation along the trajectories and positive relaxation cycle of system (
3) corresponds to this fixed point (if
and
fulfill (
41) and function
f satisfies (
40), then in the case of positive coupling solution of system (
3) does not change its sign). Similarly, there exists at least one negative relaxation cycle of system (
3) in the case of positive coupling.
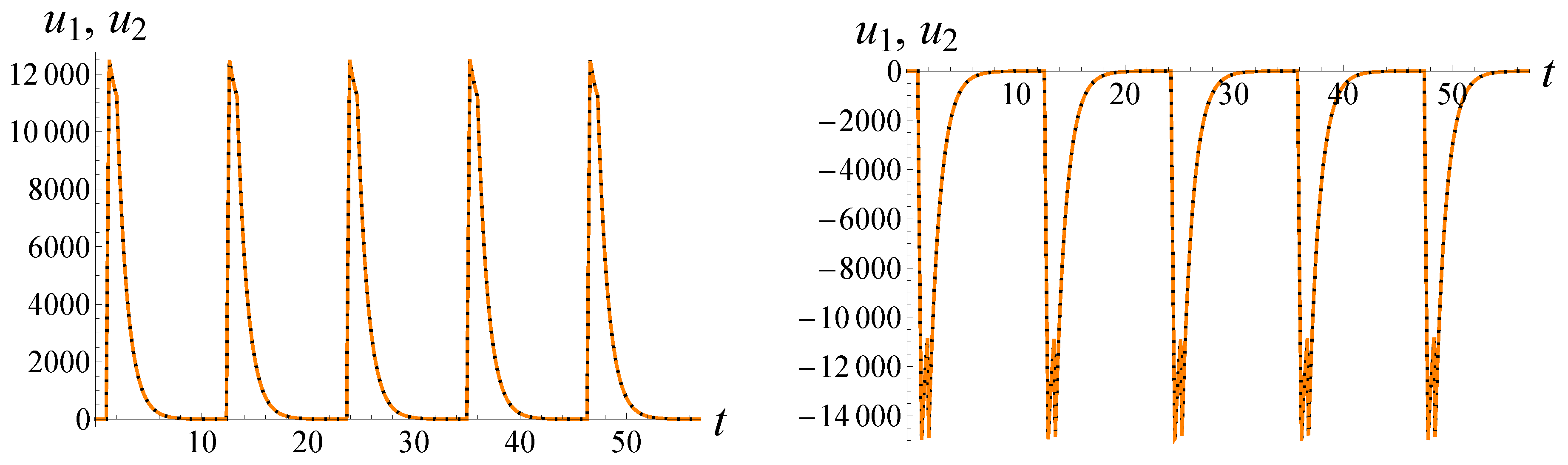
In
Figure 3, there are examples of two coexisting relaxation cycles of system (
3).
If
, then it follows from (
35) that
at
. It follows from Lemmas 3–6 that for all
and
Theorem 4 is true. Therefore, there exists at least one
, such that image of the set
(or
) under the
q-th iteration of map (
35) belongs to the set
(or
respectively). Thus, in the case of
, there exists at least one relaxation cycle.
Thus, the following statement holds.
Corollary 5. Suppose conditions (4) and (40) are true. Then, in the case , there exists at least two relaxation cycles of system (3) and in the case of there exists at least one relaxation cycle of system (3). 6. Dependence of Dynamics of System (3) on the Sign of Coupling
In this section, we show how asymptotics and difference
(analog of period) of solutions of system (
3) depends on the value
in the case
and in the case
(in this section below, we discuss only such solutions of system (
3) for those assumptions of Theorem 1 or 2 fulfill).
First, consider the case
. From Formulas (
29), (
30), and (
32), we obtain that components
and
have the same leading terms of asymptotics on the interval
and that these leading terms of asymptotics do not depend on
. Thus, from Formulas (
9), (
10), (
12), (
29), (
30) and (
32), we obtain that the leading term of asymptotics of solution of system (
3) depends on
only for
(see
Figure 4). From Corollary 4, we get that in the case
difference
has order
at
for all
, so we may say that in the case
oscillators
and
“synchronize” (for smaller values of
oscillators
and
may “synchronize”, too, but in the case
they must “synchronize”).
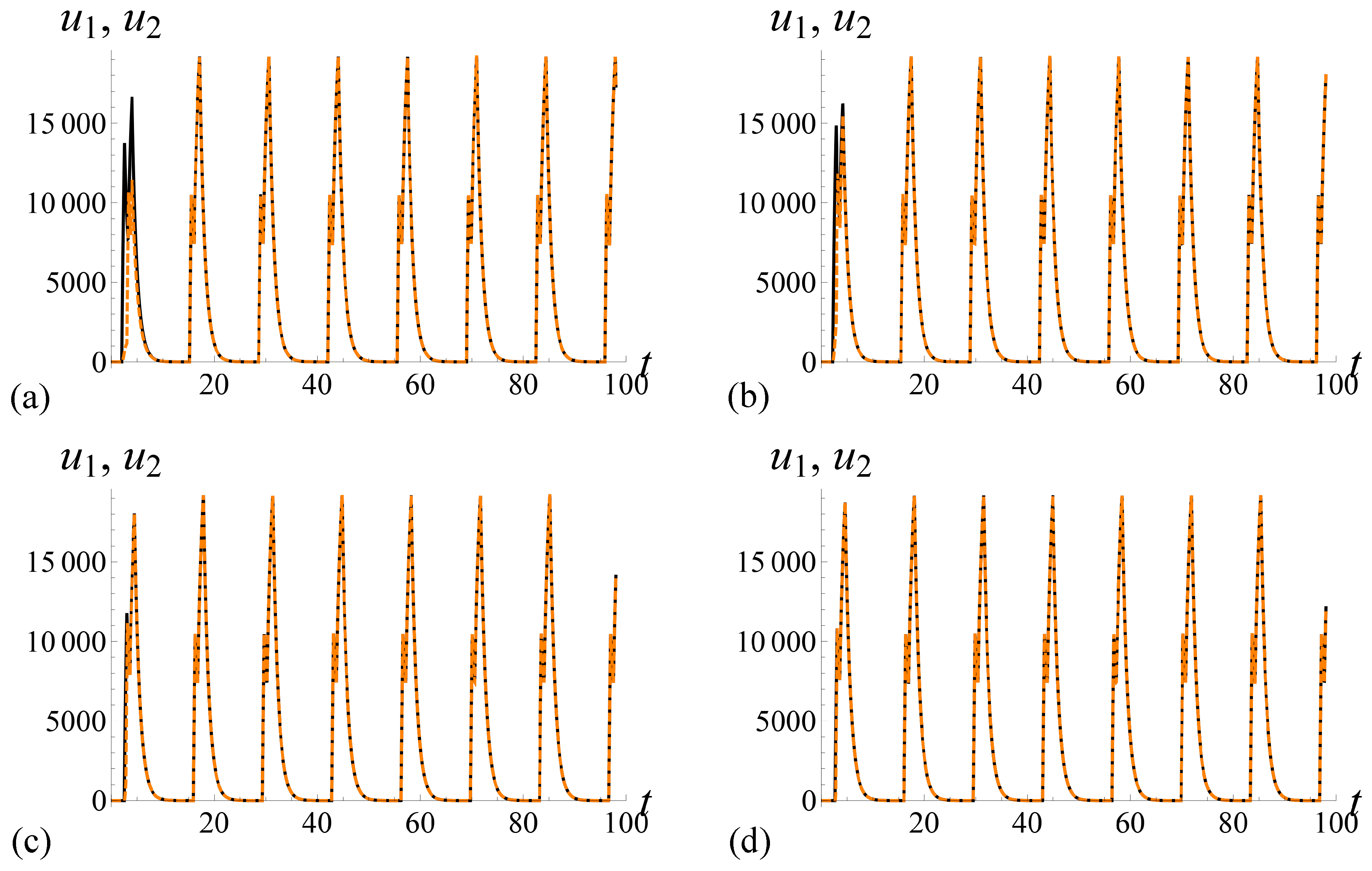
The leading term of asymptotics of the difference does not depend on , too.
Figure 4 illustrates dependence of solutions of system (
3) on
in the case
. There are solutions of system (
3) with identical function
F, parameters
and
T, and initial conditions for different parameters
in
Figure 4.
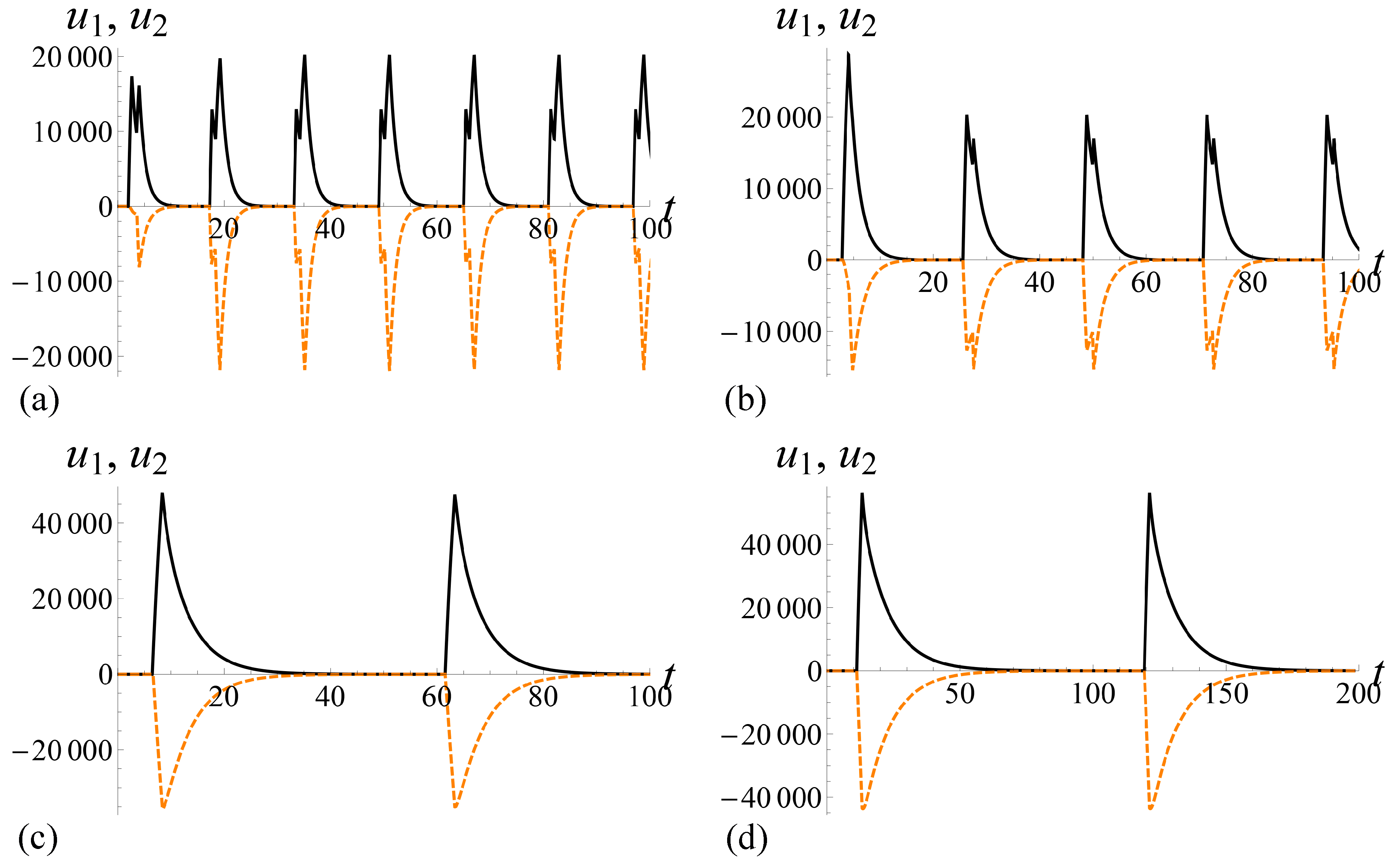
Now, consider the case .
From (
9), (
10), (
12), (
36), (
37), and (
39), we get that asymptotics of solutions of system (
3) depends crucially on the value of parameter
for all
in the case
and that oscillators
and
are not close to each other (the leading terms of their asymptotics are different for all
).
It follows from (
34) that difference
increases with the decreasing of parameter
(see
Figure 5).
Thus, asymptotics and shape of solution and difference
depend crucially on the value of
in the case
(see
Figure 5).
Figure 5 illustrates the dependence of solutions of system (
3) on
in the case
. Solutions of system (
3) with identical function
F, parameters
and
T, and initial conditions for different parameters
are presented in
Figure 5.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




