A Novel Integral Equation for the Riemann Zeta Function and Large t-Asymptotics

{kind=link}
Abstract
1. Introduction
Organisation of the Paper
2. Derivation of a Linear Integral Equation for
2.1. The Contribution of and
2.2. The Contribution of the Leading Order Term of
2.3. The Contribution of
2.4. A Volterra-Type Integral Equation
3. The Methodology for Deriving the Integral Equation (8)
3.1. An Estimate for
3.2. An Estimate for
3.3. Review of Techniques for Estimating Euler-Zagier Double Sums
- (a)
- (b)
- (c)
- .
4. Derivation of the Estimate (7)
- The estimation of is straightforward.
- The estimation of involves the use of partial summation technique described in [14].
4.1. A Lemma for Partial Summation in Two Dimensions
4.2. The Different forms of
- (i)
- , with the constant c independent of t:The condition yields that is bounded.
- (ii)
- , for some constant independent of t:The condition , yields that , thus the term is bounded. Furthermore, this condition restricts the set of summation in a sufficiently small set, so that we will use a different technique to estimate the relevant sum compared to the case (i).
- (iii)
- , for any constant independent of t:The leading contribution is equal to the pole contribution multiplied by some constant c depending only on , with and .If , then, using the analysis in [11], we obtainIf , then, similarly to the above derivation and using the Plemelj’s formulae we obtain
4.3. The Estimation of the Three Parts of
4.3.1. The Estimate of Case (iii)
4.3.2. The Estimate of Case (ii)
4.3.3. The Estimate of Case (i)
The Estimate of
The Estimate of
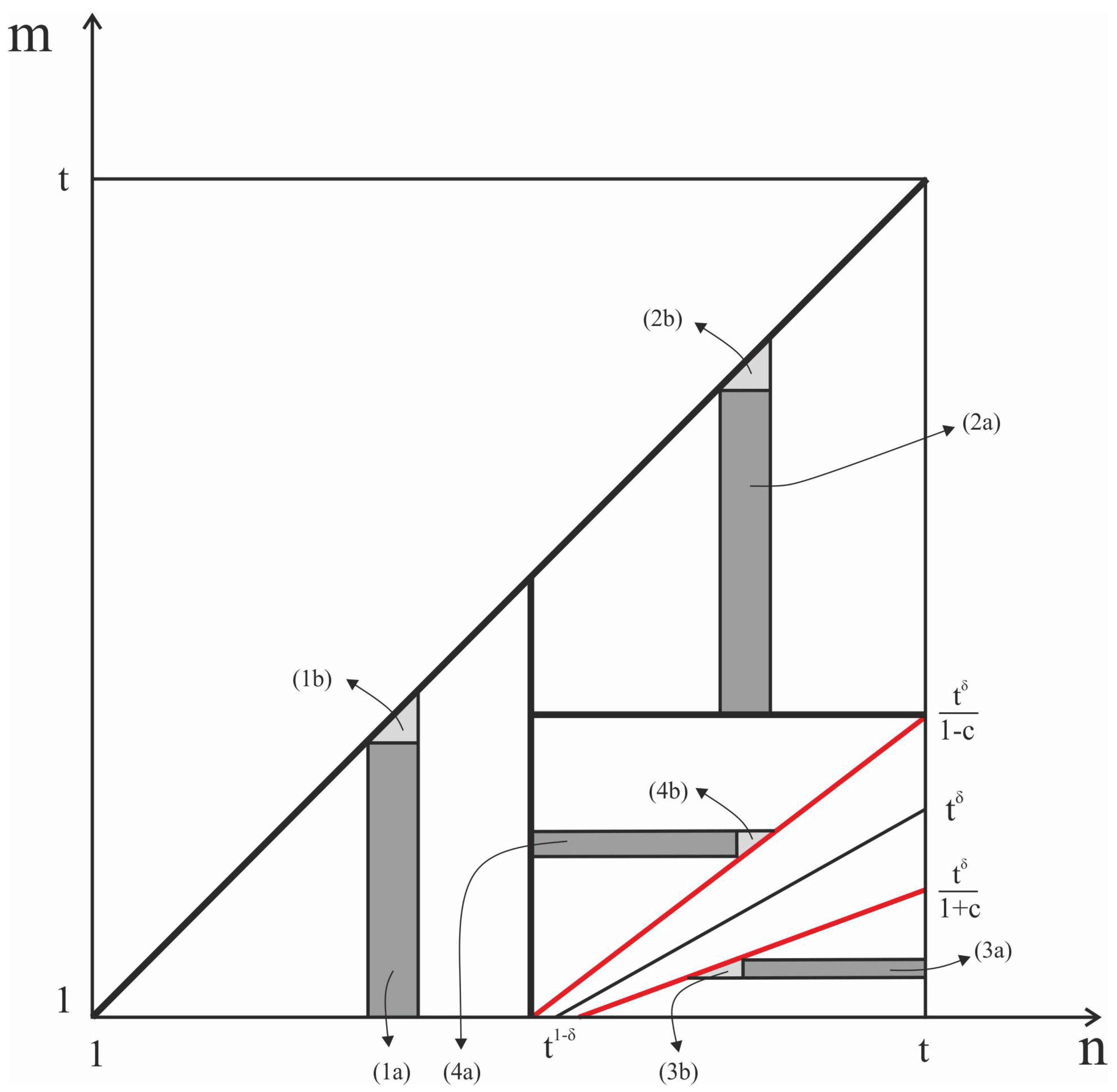
- For , two subregions:
- (1a)
- and .
- (1b)
- .
- For , two subregions:
- (2a)
- and .
- (2b)
- .
- For , two subregions:
- (3a)
- and .
- (3b)
- .
- For , two subregions:
- (4a)
- and .
- (4b)
- .
4.4. An Alternative Way to Estimate
- The first term of the rhs of (48) can be analysed in the same way as the sum , with the only difference that in the current analysis we find it more convenient to employ the simpler version of partial summation technique described in Lemma A1.
- The second term of the rhs of (48) can be embedded in the analysis of the sum . In this case it is more convenient to employ a combination of partial summation techniques, as they are described in Lemmas 2 and A1, respectively.
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Asymptotics of |ζ(s)|2
Appendix B. Derivation of (24)
Appendix C. Abel’s Summation
References
- Weyl, H. Ueber die Gleichverteilung von Zahlen mod. Eins. Math. Ann. 1916, 77, 313–352. [Google Scholar] [CrossRef]
- Hardy, G.H.; Littlewood, J.E. Contributions to the theory of the Riemann zeta-function and the theory of the distribution of primes. Acta Math. 1916, 41, 119–196. [Google Scholar] [CrossRef]
- Vinogradov, I.M. A new method of estimation of trigonometrical sums. Mat. Sbornik 1936, 43, 175–188. [Google Scholar]
- Bourgain, J. Decoupling, exponential sums and the Riemann zeta function. J. Am. Math. Soc. 2017, 30, 205–224. [Google Scholar] [CrossRef]
- Siegel, C.L. Über Riemanns Nachlaßzur analytischen Zahlentheorie. In Quellen Studien zur Geschichte der Mathematik Astronomie und Physik Abteilung B: Studien 2: 4580, 1932; Springer: Berlin, Germany, 1966; Volume 1. [Google Scholar]
- Fokas, A.S.; Lenells, J. On the asymptotics to all orders of the Riemann Zeta function and of a two-parameter generalization of the Riemann Zeta function. arXiv 2012, to appear. arXiv:1201.2633. [Google Scholar]
- Fernandez, A.; Fokas, A.S. Asymptotics to all orders of the Hurwitz zeta function. J. Math. Anal. Appl. 2018, 465, 423–458. [Google Scholar] [CrossRef]
- Kalimeris, K.; Fokas, A.S. Explicit asymptotics for certain single and double exponential sums. Proc. R. Soc. Edinb. A Math. 2017, 1–26. [Google Scholar] [CrossRef]
- Fokas, A.S. A novel approach to the Lindelöf hypothesis. arXiv 2019, to appear. arXiv:1708.06607. [Google Scholar]
- Kiuci, I.; Tanigawa, Y. Bounds for double zeta functions. Annali della Scuola Normale Superiore di Pisa-Classe di Scienze 2006, 5, 445–464. [Google Scholar]
- Fokas, A.S.; Kalimeris, K.; Lenells, J. A Novel Integral Equation for the Riemann Zeta Function and a Significant Improvement of the Current Large t Estimate. 2019. in preparation. [Google Scholar]
- Krätzel, E. Lattice Points; Springer: Berlin, Germany, 1989. [Google Scholar]
- Titchmarsch, E.C. The Theory of the Riemann Zeta-Function, 2nd ed.; Oxford University Press: Oxford, UK, 1987. [Google Scholar]
- Titchmarsch, E.C. On Epstein’s Zeta-function. Proc. Lond. Math. Soc. 1934, 2, 485–500. [Google Scholar] [CrossRef]
- Ishikawa, H.; Matsumoto, K. On the estimation of the order of Euler-Zagier multiple zeta-functions. Ill. J. Math. 2003, 47, 1151–1166. [Google Scholar] [CrossRef]

© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kalimeris, K.; Fokas, A.S. A Novel Integral Equation for the Riemann Zeta Function and Large t-Asymptotics. Mathematics 2019, 7, 650. https://doi.org/10.3390/math7070650
Kalimeris K, Fokas AS. A Novel Integral Equation for the Riemann Zeta Function and Large t-Asymptotics. Mathematics. 2019; 7(7):650. https://doi.org/10.3390/math7070650
Chicago/Turabian StyleKalimeris, Konstantinos, and Athanassios S. Fokas. 2019. "A Novel Integral Equation for the Riemann Zeta Function and Large t-Asymptotics" Mathematics 7, no. 7: 650. https://doi.org/10.3390/math7070650
APA StyleKalimeris, K., & Fokas, A. S. (2019). A Novel Integral Equation for the Riemann Zeta Function and Large t-Asymptotics. Mathematics, 7(7), 650. https://doi.org/10.3390/math7070650