Theorem 1. Suppose that has a multiple root α of multiplicity and is analytic in a neighborhood of α. Let for . Let be an initial guess selected in a sufficiently small region containing α. Assume is analytic in a neighborhood of 0. Let for . Let be holomorphic in a neighborhood of . Let be holomorphic in a neighborhood of . Let for and . Let for , and . If , are fulfilled, then Scheme (1) leads to an optimal class of sixteenth-order multiple-root finders possessing the following error equation: with for where , , ,
,
,
,
,
,
,
, ,
.
Proof. Since Scheme (
1) employs five functional evaluations, namely,
,
,
,
, and
, optimality can be achieved if the corresponding convergence order is 16. In order to induce the desired order of convergence, we begin by the 16th-order Taylor series expansion of
about
:
For brevity of notation, we abbreviate
as
e. Using Mathematica [
18], we find:
where
and
for
.
After a lengthy computation using the fact that
, we get:
where
,
for
.
In the third substep of Scheme (
1),
can be achieved based on Kung–Traub’s conjecture. To reflect the effect on
from
in the second substep, we need to expand
up to eighth-order terms; hence, we carry out a sixth-order Taylor expansion of
about 0 by noting that
and
:
where
for
. As a result, we come up with:
where
and
for
. Selecting
and
leads us to an expression:
By a lengthy computation using the fact that
, we deduce:
where
and
for
.
In the last substep of Scheme (
1),
can be achieved based on Kung-Traub’s conjecture. To reflect the effect on
from
in the third substep, we need to expand
up to sixteenth-order terms; hence, we carry out a 12th-order Taylor expansion of
about
by noting that:
and
with
satisfying
for all
:
Substituting
, and
into the third substep of (
1) leads us to:
where
, for
,
and
. Thus
immediately annihilates the fourth-order term. Substituting
into
and solving for
, we find:
Continuing the algebraic operations in this manner at the
i-th (
) stage with known values of
, we solve
for remaining
to find:
Substituting
into (
12) and simplifying we find:
where
and
are described in (
3) and
for
.
To compute the last substep of Scheme (
1), it is necessary to have an eighth-order Taylor expansion of
about
due to the fact that
. It suffices to expand
up to eighth-, fourth-, and second-order terms in
in order, by noting that
with
satisfying
for all
:
Substituting
and
in (
1), we arrive at:
where
and
), for
,
,
,
,
,
.
Since
makes
, we substitute
into
and solve for
to find:
Continuing the algebraic operations in the same manner at the
i-th (
) stage with known values of
, we solve
for remaining
to find:
Upon substituting Relation (
19) into
, we finally obtain:
where
,
, and
as described in (
3). This completes the proof. ☐
Special Cases of Weight Functions
Theorem 1 enables us to obtain
,
, and
by means of Taylor polynomials:
where parameters
–
,
,
,
,
,
,
,
,
and
may be free.
Although various forms of weight functions , and are available, in the current study we limit ourselves to all three weight functions in the form of rational functions, leading us to possible purely imaginary extraneous fixed points when is employed. In the current study, we will consider two special cases described below:
The first case below will represent the best scheme, W3G7, studied in [
19] only for
.
Case 1:
where
and
.
As a second case, we will consider the following set of weight functions:
Case 2:
where
and determination of the 48 coefficients
of
is described below. Relationships were sought among all free parameters of
, giving us a simple governing equation for extraneous fixed points of the proposed family of methods (
1).
To this end, we first express
and
v for
as follows with
:
In order to obtain a simple form of
, we needed to closely inspect how it is connected with
. When applying to
, we find
with
as shown below:
Using the two selected weight functions
, we continue to determine coefficients
of
yielding a simple governing equation for extraneous fixed points of the proposed methods when
is applied. As a result of tedious algebraic operations reflecting the 25 constraints (with possible rank deficiency) given by (
18) and (
19), we find only 23 effective relations, as follows:
The three relations, , and give one relation .
Due to 23 constraints in Relation (
27), we find that 18 free parameters among 48 coefficients of
in (
24) are available. We seek relationships among the free parameters yielding purely imaginary extraneous fixed points of the proposed family of methods when
is applied.
To this end, after substituting the 23 effective relations given by (
27) into
in (
24) and by applying to
, we can construct
in (
1) and seek its roots for extraneous fixed points with
:
where
is a constant factor,
, with
,
and
, with
,
. The coefficients of both polynomials,
and
, contain at most 18 free parameters.
We first observe that partial expressions of
with
, namely,
and the denominator of (
28) contain factors
when
is applied. With an observation of presence of such factors, we seek a special subcase in which
may contain all the interested factors as follows:
where
is a polynomial of degree
, with
and
; two polynomial factors
and
were found in Case 3G of the previous study done by Geum–Kim–Neta [
19]. Notice that factors
,
,
and
of
are all negative, i.e., the corresponding extraneous fixed points are all purely imaginary.
In fact, the degree of will be decreased by annihilating the relevant coefficients containing free parameters to make all its roots negative. We take the 6 pairs of to form 6 subcases named as Case 2A–2F in order. The lengthy algebraic process eventually leads us to additional constraints to each subcase described below:
Case 2A:
and
. These 12 additional constraints
are expressed in terms of 12 parameters
,
,
,
,
,
,
,
,
,
that are arbitrarily free for the purely imaginary extraneous fixed points. Those 12 free parameters are chosen at our disposal. Then, using Relations (
27) and (
30), the desired form of
in (
24) can be constructed.
Case 2B:
and
. These 14 additional constraints are expressed in terms of 10 parameters
,
,
,
that are arbitrarily free for the purely imaginary extraneous fixed points. Those 10 free parameters are chosen at our disposal. Then, using Relations (
27) and (
31), the desired form of
in (
24) can be constructed.
Case 2C:
and
. These 16 additional constraints are expressed in terms of 8 parameters
,
,
that are arbitrarily free for the purely imaginary extraneous fixed points. Those 8 free parameters are chosen at our disposal. Then, using Relations (
27) and (
32), the desired form of
in (
24) can be constructed.
Case 2D: , being identical with Case 2A.
Case 2E: , being identical with Case 2B.
Case 2F: ,
and
. These 13 additional constraints are expressed in terms of 11 parameters
,
,
,
,
,
,
,
,
,
,
that are arbitrarily free for the purely imaginary extraneous fixed points. Those 11 free parameters are chosen at our disposal. Then, using Relations (
27) and (
33), the desired form of
in (
24) can be constructed. After a process of careful factorization, we find the expression for
in (
28) stated in the following lemma.
Proposition 1. The expression in (28) is identical in each subcase of 2A–2F and given by a unique relation below:despite the possibility of different coefficients in each subcase.
Proof. Let us write
in (
28) as
with
and
. Then after a lengthy process of a series of factorizations with the aid of Mathematica symbolic ability, we find
and
in each subcase as follows.
(1) Case 2A: with
and
, we get
where
.
(2) Case 2B: with
and
, we get
where
.
(3) Case 2C: with
and
, we get
where
.
(4) Case 2D: with
and
, we get
(5) Case 2E: with
and
, we get
(6) Case 2F: with
and
, we get
where
.
Substituting each pair of
into (
28) yields an identical Relation (
34) as desired. ☐
Remark 2. The factorization process in the above proposition yields the additional constraints given by (30)–(33) for subcases 2A–2F, after a lengthy computation. Case 2D and Case 2E are found to be identical with Case 2A and Case 2B, respectively, by direct computation.
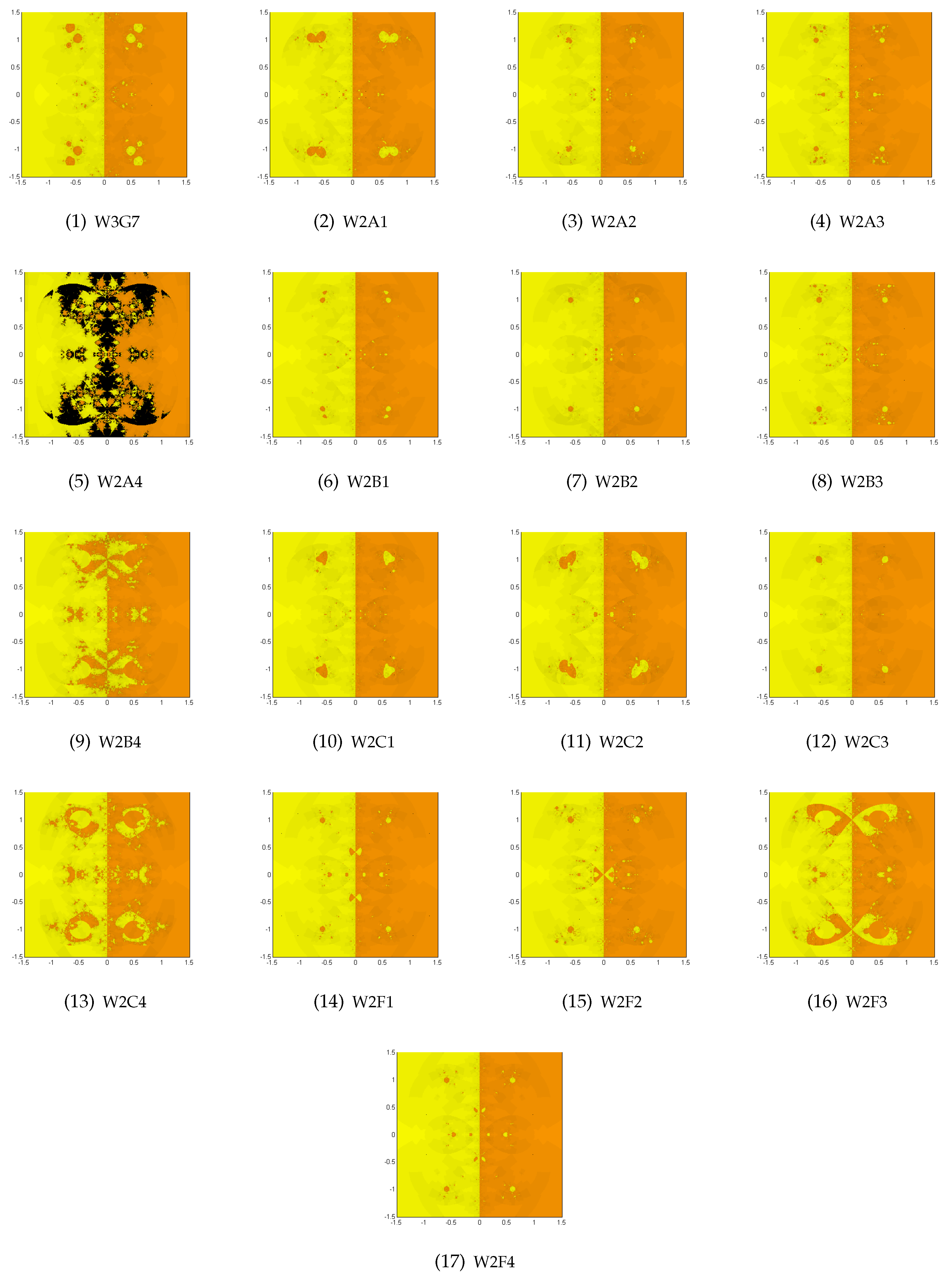
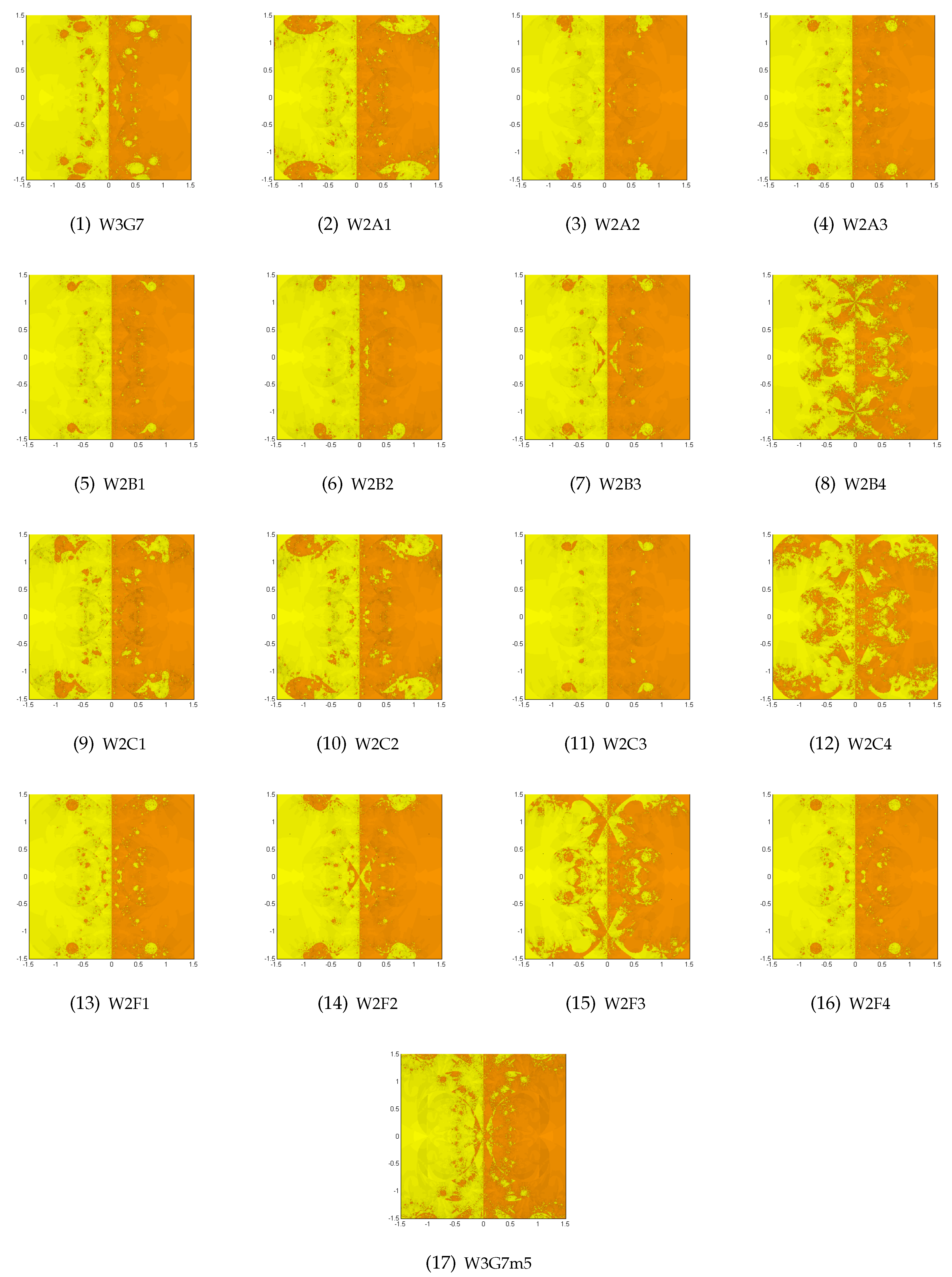
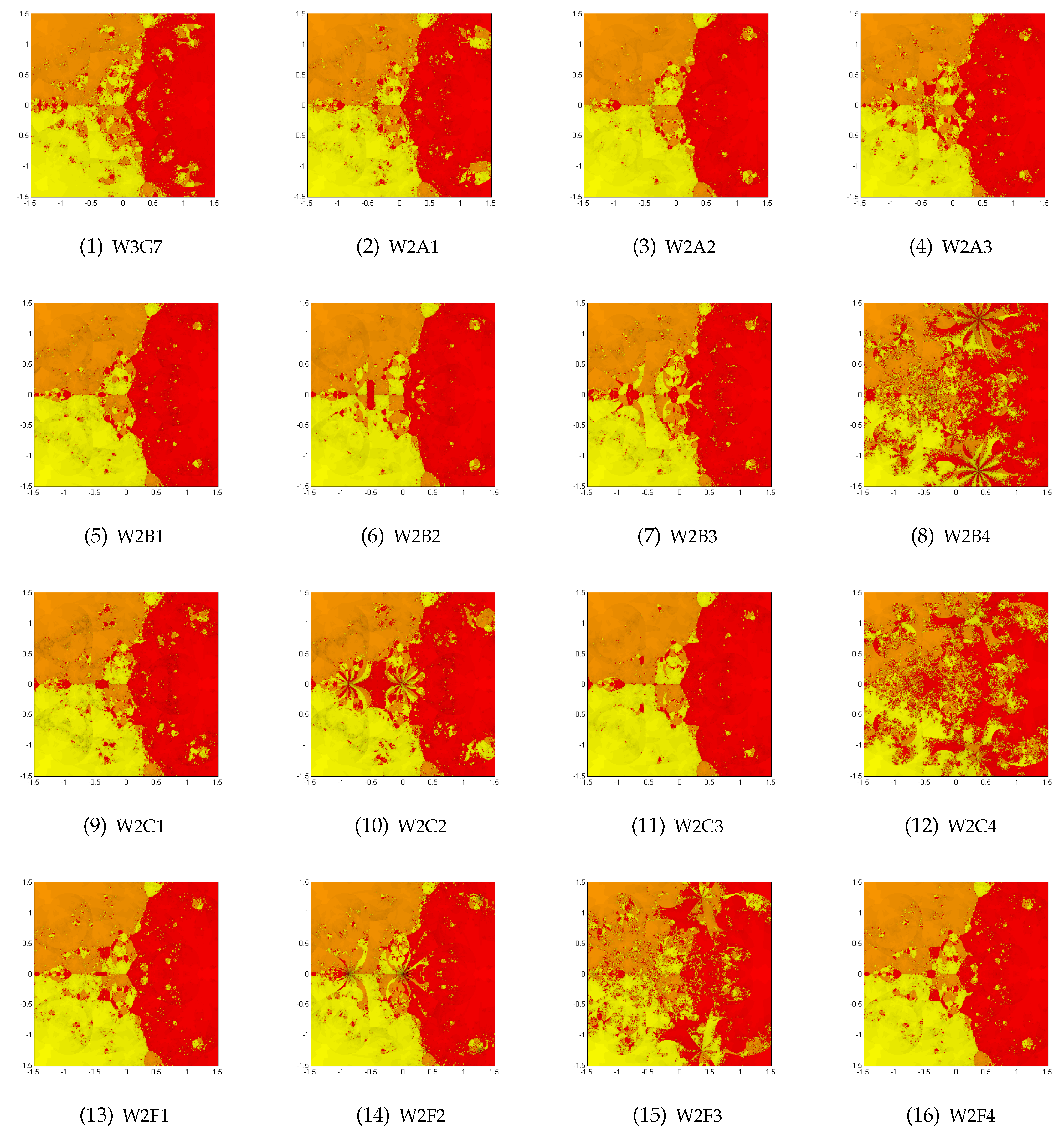
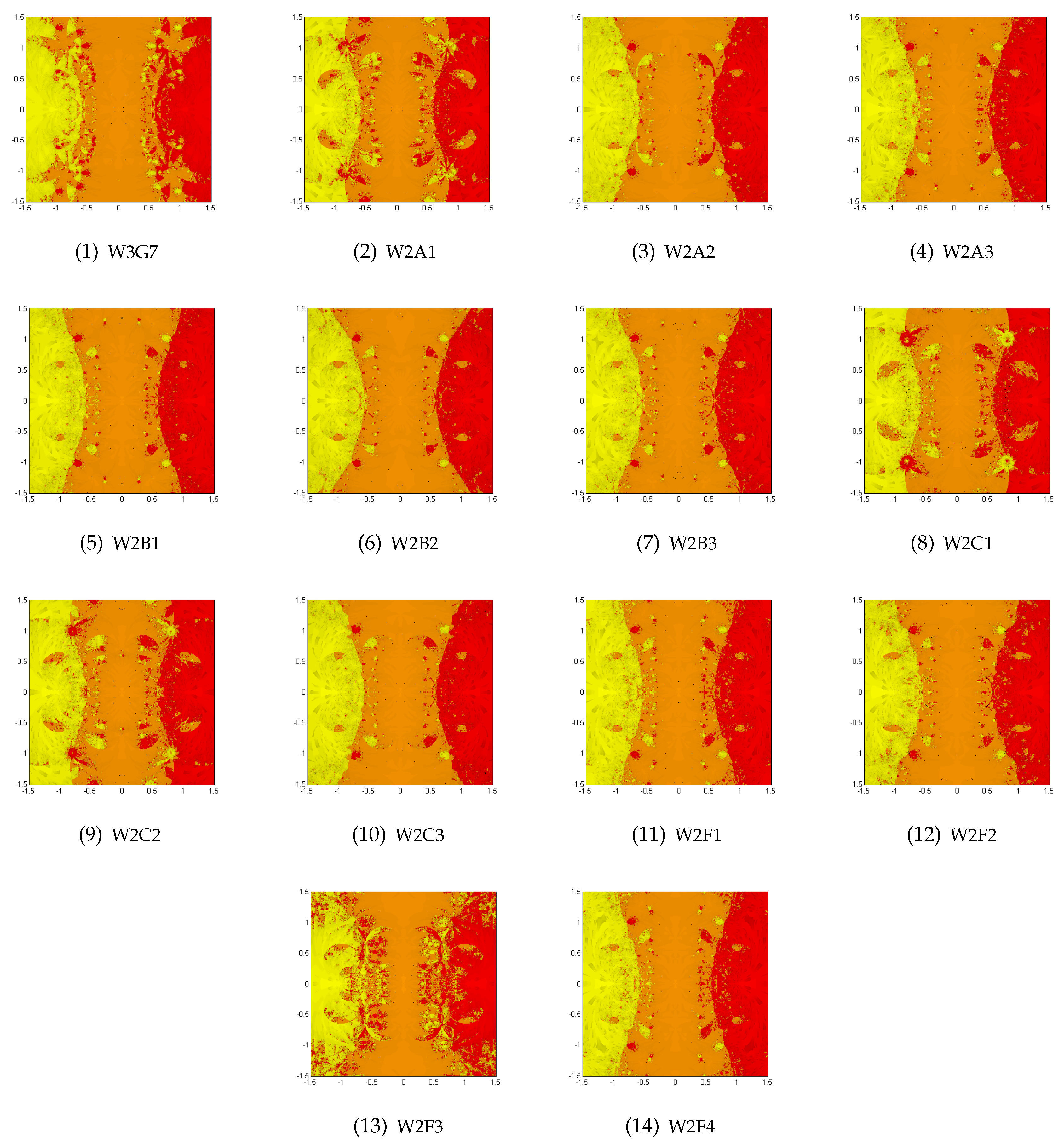
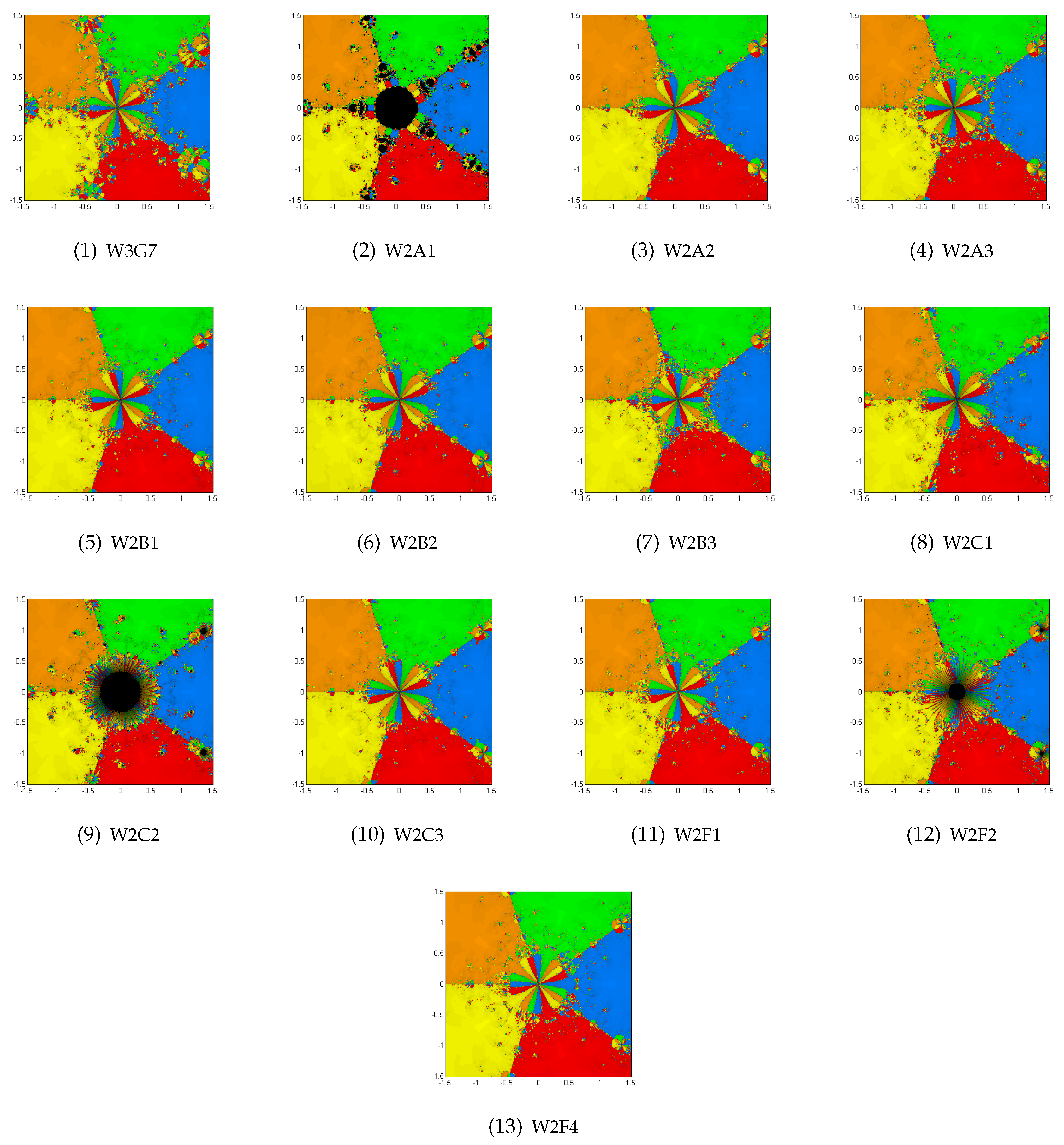
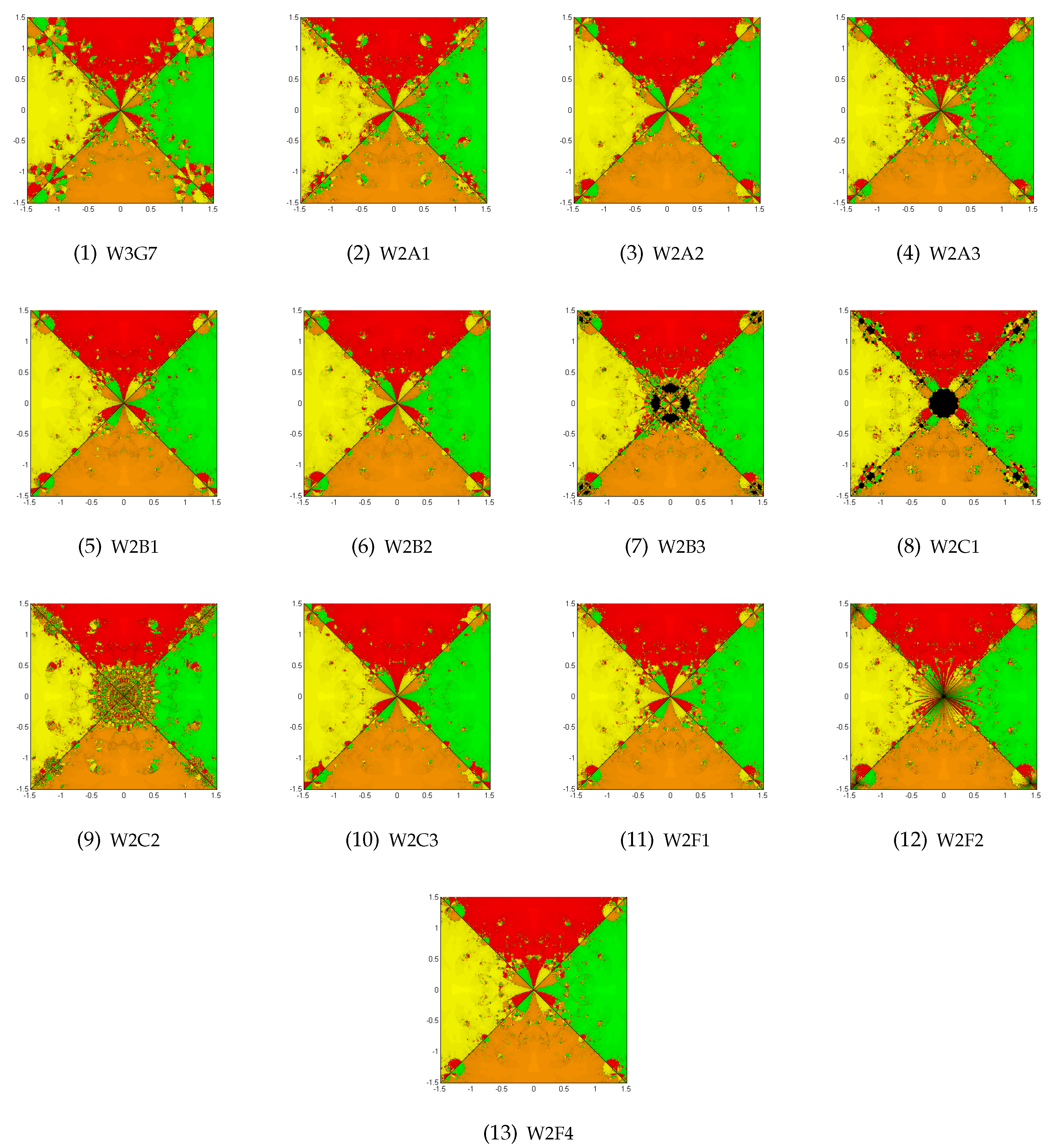
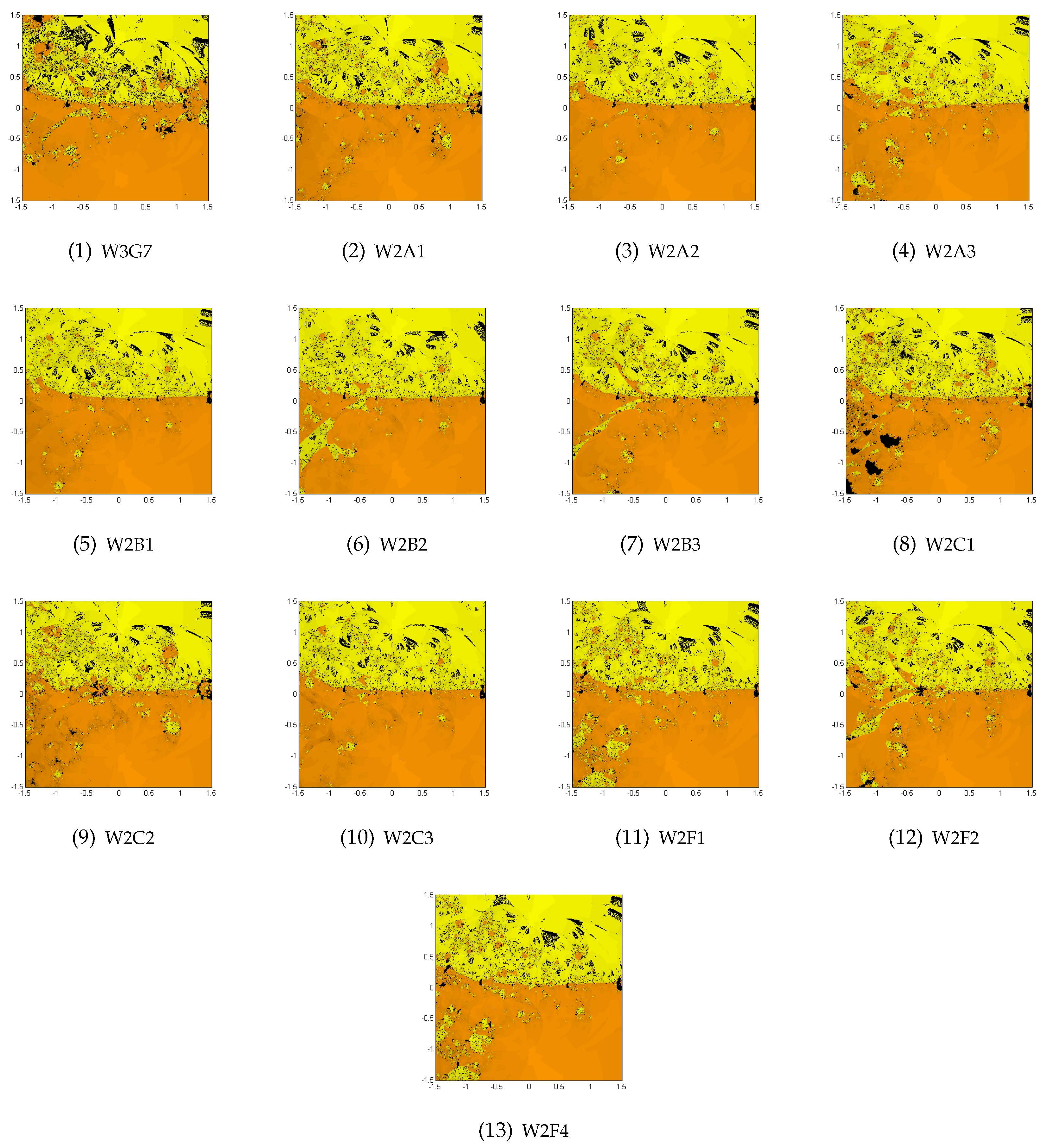
In
Table 1, we list free parameters selected for typical subcases of 2A–2F. Combining these selected free parameters with Relations (
27) and (
30)–(
33), we can construct special iterative schemes named as W2A1, W2A2,
W2F3, W2F4. Such schemes together with W3G7 for Case 1 shall be used in
Section 4 to display results on their numerical and dynamical aspects.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}