1. Introduction
Integral equations are very common in physics and engineering, since a lot of problems of these disciplines can be reduced to solve an integral equation. In general, we cannot solve integral equations exactly and are forced to obtain approximate solutions. For this, different numerical methods can be used. So, for example, iterative schemes based on the homotopy analysis method in [
1], adapted Newton-Kantorovich schemes in [
2] and schemes based on a combination of the Newton-Kantorovich method and quadrature methods in [
3]. Besides, techniques based on using iterative methods are also interesting, since the theoretical significance of the methods allows drawing conclusions about the existence and uniqueness of solution of the equations. The use of an iterative method allows approximating a solution and, by analysing the convergence, proving the existence of solution, locating a solution and even separating such solution from other possible solutions by means of results of uniqueness. The theory of fixed point plays an important role in the development of iterative methods for approximating, in general, a solution of an equation and, in particular, for approximating a solution of an integral equation.
In this work, we pay attention to the study of nonlinear Fredholm integral equations with nonlinear Nemytskii operators of type
where
, kernel
of integral equation is a known function in
,
is a Nemytskii operator [
4] given by
, such that
and
is a derivable real function, and
is the unknown function to find.
It is common to use the Banach Fixed Point Theorem [
5,
6,
7] to prove the existence of a unique fixed point of an operator and approximate it by the method of successive approximations. Moreover, global convergence for the method is obtained in the full space. For this, we use that the operator involved is a contraction.
Our main aim of this work is to do a study of integral Equation (
1) from Newton’s method,
that has quadratic convergence, superior to the convergence of the method of successive approximations, which is linear. This study is similar to that of the Fixed Point Theorem for the method of successive approximations. In addition, we obtain a domain of global convergence,
, with
, for Newton’s method. Also, we obtain a result of uniqueness of solution that separate the approximate solution from other possible solutions. To carry out this study, we develop a technique based on the use of auxiliary points, which allows obtaining domains of global convergence, locating solutions of (
1) and domains of uniqueness of these solutions.
On the other hand, if
, integral Equation (
1) is linear and well-known, it is a Fredholm integral equation of the second kind, which is connected with the eigenvalue problem represented by the homogeneous equation
and has non-trivial solutions
for the characteristic values or eigenvalues
(the latter term is sometimes reserved to the reciprocals
) of kernel
and every non-trivial solution of (
1) is called characteristic function or eigenfunction corresponding to characteristic value
. If Equation (
1) is nonlinear, our results allow doing a study of the equation based on the values of parameter
, which is another important aim of our work.
2. Global Convergence and Uniqueness of Solution
If we are interested in proving the convergence of an iteration, we can usually follow three ways to do it: local convergence, semilocal convergence and global convergence. First, from some conditions on the operator involved, if we require conditions to the solution , we establish a local analysis of convergence and obtain a ball of convergence of the iteration, which, from the initial approximation lying in the ball, shows the accessibility to . Second, from some conditions on the operator involved, if we require conditions to the initial iterate , we establish a semilocal analysis of convergence and obtain a domain of parameters, which corresponds to the conditions required to the initial iterate, so that the convergence of iteration is guaranteed to . Third, from some conditions on the operator involved, the convergence of iteration to in a domain, and independently of the initial approximation , is established and global convergence is called. Observe that the three studies require conditions on the operator involved and requirement of conditions to the solution, to the initial approximation, or to none of these, is what determines the way of analysis.
The local analysis of the convergence has the disadvantage that it requires conditions on the solution and this is unknown. The global analysis of convergence, as a consequence of the absence of conditions on the initial approximations and the solution, is very specific for the operators involved.
In this paper, we focus our attention on the analysis of the global convergence of Newton’s method and, as a consequence, we obtain domains of global convergence for nonlinear integral Equation (
1) and also locate a solution. For this, we obtain a ball of convergence, by using an auxiliary point, that contains a solution and guarantees the convergence of Newton’s method from any point of the ball.
Solving Equation (
1) is equivalent to solving the equation
, where
and
As a consequence,
where
,
L is such that
, for all
, and
.
From the Banach lemma on invertible operators, it follows
provided that
Next, we give some properties that are used later.
Lemma 1. For operator (2), we have: - (a)
, with .
- (b)
, with .
As a consequence of item (b) of Lemma 1, it follows, for
,
From the last result, and taking into account the parameters obtained previously, we analyze the first iteration of Newton’s method, what leads us to the convergence of the method.
If
, then
provided that
Moreover, from item (a) of Lemma 1, it follows
and, from item (b) of Lemma 1, we have
so that
, provided that
Observe now that condition (
5) holds if
where
and
are the two real positive roots of quadratic equation
After that, if we assume that
where
, for all
, and provided that condition (
5) holds, it follows in the same way that
so that (
6) and (
7) are true for all positive integers
n by mathematical induction.
In addition,
if
which is satisfied provided that
As a consequence, condition (
4) holds. More precisely, we can establish the following result.
Lemma 2. There always exists , such that inequalities (4), (5) and (8) hold, if - (a)
and ,
- (b)
and ,
where and .
Proof. First, we prove item (a) of Lemma 2. Observe that
, since
, so that
. Moreover, as
, we have
and, as a consequence,
and
, so that (
5) and (
8) hold.
Second, if
, then
and
, so that
. Then, (
5) and (
8) hold.
Third, in both cases, follows immediately, since in items (a) and (b) of Lemma 2. □
2.1. Convergence
Now, we can establish the following result.
Theorem 1. Suppose that and consider satisfying item (a) or item (b) of Lemma 2 and such that . If condition (3) holds, then Newtons’s method is well-defined and converges to a solution of in from every point . Proof. From (
6) and
, we have
, for all
, so that sequence
is strictly decreasing for all
and, therefore, sequence
is convergent. If
, then
, by the continuity of
and
when
. □
From Theorem 1, the convergence of Newton’s method to a solution of equation is guaranteed. Moreover, the best ball of location of the solution is and the biggest ball of convergence is or , depending on the value of is: for the former and for the latter.
2.2. Uniqueness of Solution
For uniqueness of solution, we establish the following result, where uniqueness of solution is proved in .
Theorem 2. Under conditions of Theorem 1, solution of is unique in .
Proof. Assume that
is another solution of
in
such that
. If operator
is invertible, we have
, since
. Then, as
it follows that
Q is invertible by the Banach lemma on invertible operators and uniqueness follows immediately. □
Notice that, from Theorems 1 and 3, the best ball of location of a solution of (
1) is
and the best ball of uniqueness of solution and the biggest ball of convergence is
or
, depending on the value of
lies.
Once given the uniqueness of solution in the domain of existence of solution , we enlarge such domain from the following theorem.
Theorem 3. Under conditions of Theorem 1, we have that the solution is unique in the domain , where .
Proof. Assume that
is another solution of
in
such that
. Then, from (
9), it follows
and
Q is again invertible by the Banach lemma on invertible operators.
Note that , since , and uniqueness of solution is obtained in the ball of global convergence given in Theorem 1, since .
5. Application
Now, we apply the last study to the following particular Davis-type integral Equation [
8]:
where the kernel of (
12) is a Green’s function defined as follows:
One can show that the function
that satisfied Equation (
12) is any solution of the differential equation
that also satisfies the two-point boundary condition:
,
.
For Equation (
12), we have
with the max-norm and
. Therefore,
and condition (
3) is reduced to
. In addition,
and, as a consequence,
After that, we choose
and hence
, so that
, that satisfies condition (
3). In this case, from Theorem 1, we can guarantee the convergence of Newton’s method to a solution of Equation (
12) with
such that
Moreover, once
is fixed, depending on the value of
, we can obtain the best ball of location of solution and the biggest ball of convergence.
Observe that we cannot apply Newton’s method directly, since we do not know the inverse operator that is involved in the algorithm of Newton’s method. Then, we use a process of discretization to transform (
12) into a finite dimensional problem. For this, we use a Gauss–Legendre quadrature formula to approximate the integral of (
12),
where the
m nodes
and weights
are known.
Next, we denote the approximations
by
, with
, so that (
12) is equivalent to the nonlinear system given by
where
After that, we write system (
13) compactly in matrix form as
where
Choose , , and hence , , and As , it follows, from Theorem 1, that the best ball of location of solution is and the biggest ball of convergence is .
If the starting point for Newton’s method is
, the method converges to the solution
of system (
14), which is shown in
Table 2, after four iterations with stopping criterion
,
.
Moreover, errors
and sequence
are shown in
Table 3. Observe then that vector shown in
Table 2 is a good approximation of a solution of (
14).
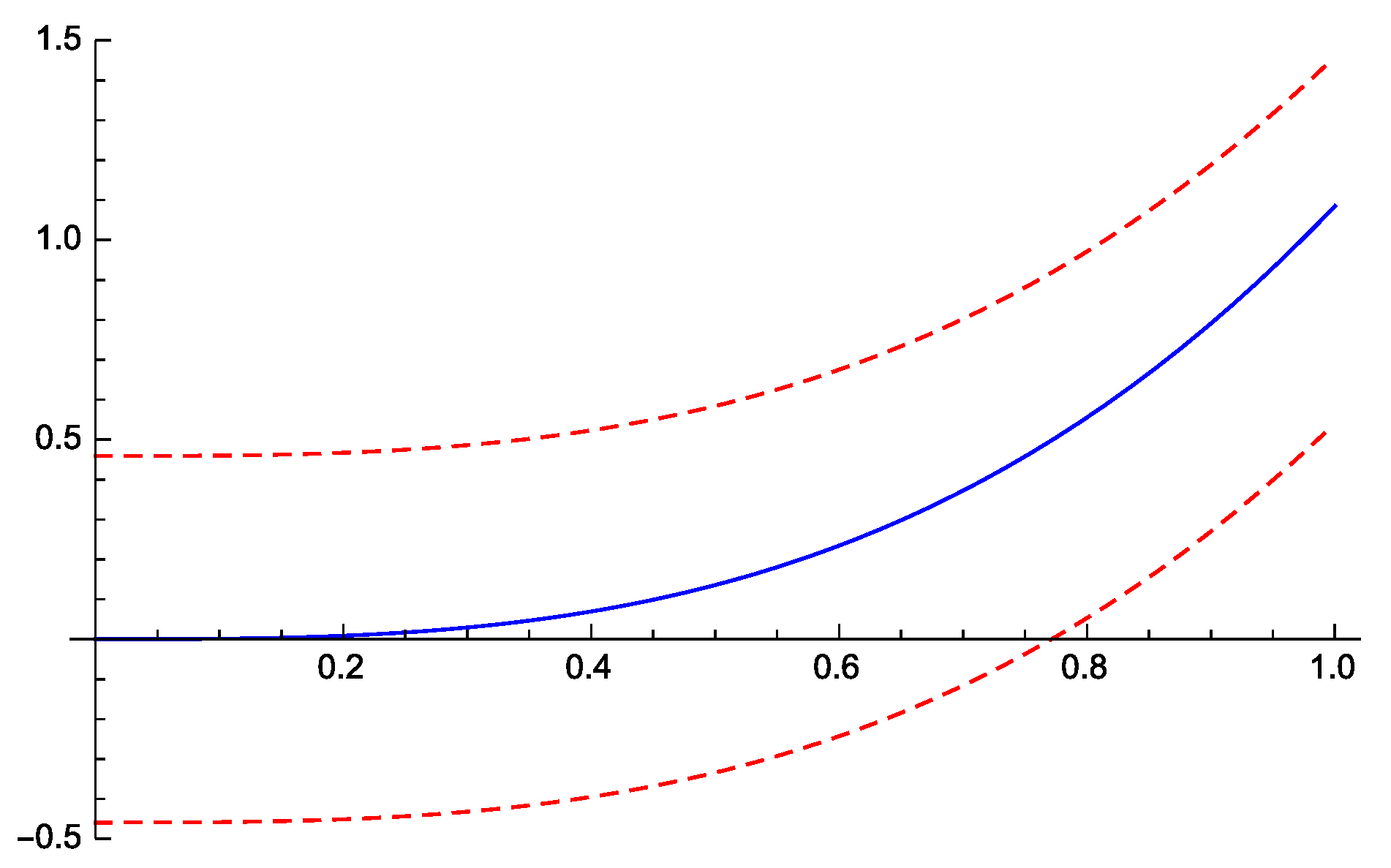
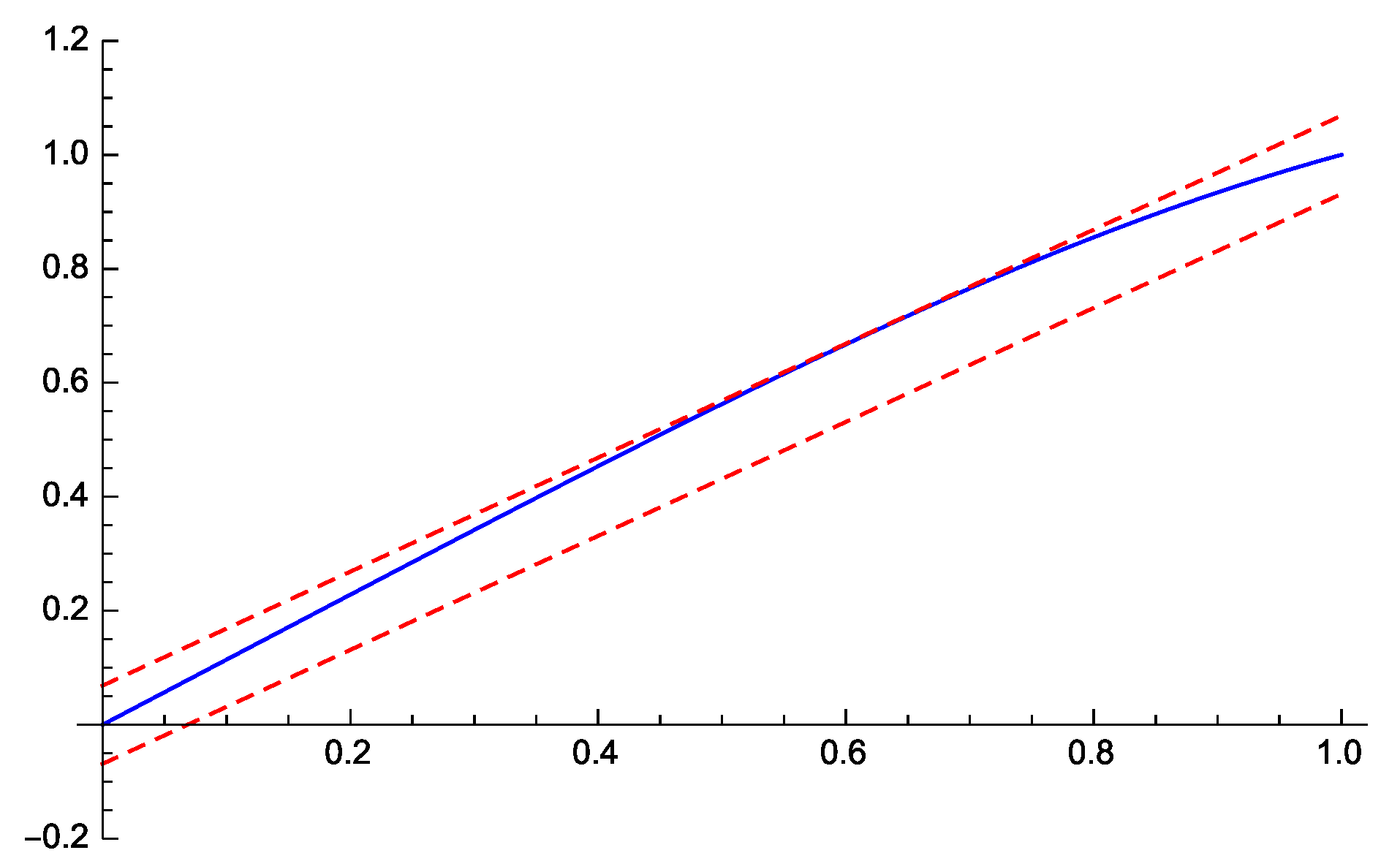
Furthermore, as a solution of (
12) satisfies
and
, if values of
Table 2 are interpolated, an approximated solution is obtained, which is painted in
Figure 2. Notice that this approximated solution lies in the domain of location of solution
which is obtained from Theorem 1.





{kind=link}
{kind=link}