1. Introduction
The Cahn–Hilliard (CH) equation was originally introduced as a phenomenological model of phase separation in a binary alloy [
1] and has been applied to a wide range of problems [
2]. The CH equation is derived from the Ginzburg–Landau energy functional:
where
c is the concentration field defined in
and
are the free energy and gradient energy coefficients. The CH equation is a gradient flow for
in the
-inner product, thus
is nonincreasing in time.
Generalizations of
for more than two components can be applied to wide range of problems, thus have been studied intensively [
3,
4,
5,
6,
7,
8,
9,
10,
11,
12,
13,
14,
15,
16,
17]. A great deal of research has been focused on the ternary system [
10] such as:
where
is the concentration field of the phase
i. There are many other forms of energy functional for the ternary system and some of them are equivalent. For example, under the constraint
, the first term in
can be rewritten [
11] as follows:
One of the most important criteria for the multi-component model is to avoid the generation of spurious phases. To be more precise, we think a physically reasonable model must satisfy the following two fundamental criteria:
- (A)
(Consistency of null-phase) If a phase is absent at the initial time, it should not appear at any time.
- (B)
(No additional phase on interface) The interface including multiple junction should be free of additional phases.
The model with
and many other models with three components obey both criteria; however, it is not well-known how to construct an energy functional for more than three components satisfying mathematical and physical criteria including these two. For example, the following generalization introduced by Lee and Kim [
12] for the vector-valued concentration field
:
does not satisfy Criteria
A and
B when
.
In this paper, we consider the following energy functional satisfying Criteria
A and
B:
where
The energy functional
introduced by Tóth et al. [
14] is a non-trivial extension of
for more than three component system in the sense that it is equivalent to
when
and
when
. We develop a high-order energy stable numerical method for this energy with quadratically mixed terms
to study phase separation in multi-component systems.
The
-gradient flow for
is given by
under the partition of unity constraint,
where
is the vector-valued chemical potential,
is the chemical potential of the phase
i,
denotes the variational derivative with respect to
,
,
,
is a Lagrange multiplier to ensure the constraint [
8,
10,
11,
12,
13,
16,
17], and
∈
. We consider the boundary conditions for
and
as the zero Neumann boundary conditions:
where
is a unit normal vector to
. We refer to Equation (
2) as the vector-valued CH (vCH) equation. Because the vCH equation is of gradient type,
is nonincreasing in time as the constraint holds:
The vCH equation is a fourth-order nonlinear partial differential equation and the
N unknowns
are linked through the constraint. Therefore, accurate and efficient numerical methods are desirable to study the dynamics of the vCH equation. In this paper, we propose a constrained Convex Splitting (cCS) scheme for the vCH equation, which is based on a convex splitting of
under the constraint. For
and 3,
has a straightforward convex–concave splitting. However, there is a difficulty with
since
in
is neither convex nor concave. To apply the convex splitting idea [
18,
19,
20] for all
N, we add and subtract an auxiliary term in
. Then, a convex–concave decomposition is available. We show analytically that the cCS scheme is mass conserving and satisfies the constraint at the next time level. It is uniquely solvable and energy stable. Furthermore, we combine the convex splitting with the implicit–explicit Runge–Kutta (RK) method [
21,
22] to develop a high-order (up to third-order) cCS scheme. We employ the specially designed implicit–explicit RK tables [
23] to have both high-order time accuracy and unconditional energy stability. We also show analytically that the high-order cCS scheme is unconditionally energy stable.
This paper is organized as follows. In
Section 2, we describe the convex splitting with an auxiliary term. We propose the (first-order) cCS scheme for the vCH equation and prove its unconditional unique solvability and energy stability. In
Section 3, we construct the high-order cCS scheme with a proof of unconditional energy stability. In
Section 4, we present numerical examples showing the accuracy, energy stability, and capability of the proposed scheme. Finally, conclusions are drawn in
Section 5.
3. Extension of the Constrained Convex Splitting Scheme To High-Order Time Accuracy
The cCS scheme in Equation (
5),
is first-order accurate in time and its order of time accuracy can be improved by various approaches. One of them is to combine with an
s-stage implicit–explicit RK method [
21]: let
,
where
and
are RK coefficients for
, and then
by using the stiffly accurate condition.
Recently, the authors of [
23] proved that a Convex Splitting Runge–Kutta scheme for a gradient flow is unconditionally energy stable under the resemble condition (
for
and
). Applying the resemble condition to Equation (
9), we have the following
s-stage high-order cCS scheme for the vCH equation (
2):
where
.
Lemma 5. The s-stage high-order cCS scheme in Equation (10) is also mass conserving, satisfies the constraint at any time , and is uniquely solvable for any time step , provided that for . Proof. The proofs are similar to Lemmas 2 and 3 and Theorem 1, thus we omit the details here. □
Before proving the energy stability of the s-stage high-order cCS scheme, we define an matrix as for and for , and an matrix as with .
Theorem 3. Suppose that is positive definite. The s-stage high-order cCS scheme with for and an initial condition satisfying is unconditionally energy stable, meaning that for any , Proof. The analogous proof can be found in [
23]. Using Lemma 4, we have
where the last equality follows from the fact that
Let
. Since
is positive definite,
where
for
and
. It follows that
. □
Remark 1. The first-order cCS scheme can be viewed as the one-stage cCS scheme with and .
4. Numerical Experiments
The
s-stage high-order cCS scheme in Equation (
10) can be rewritten as follows: for
,
where
. The nonlinearity of the scheme comes from
and
and these can be handled using a Newton-type linearization [
24,
25,
26,
27]: for
,
where
. We then develop a Newton-type fixed point iteration method for the scheme as
where
,
for
, and we set
if a relative
-norm of the consecutive error
is less than a tolerance
. In this paper, the biconjugate gradient (BICG) method is used to solve the system in Equation (
11) and we use the following preconditioner
P to accelerate the convergence speed of the BICG algorithm:
where
and
is the average value of
. The stopping criterion for the BICG iteration is that the relative residual norm is less than
.
For first-, second-, and third-order accuracy, we use the following matrices
, respectively [
23]:
and
The positive definiteness of
is easily seen by showing eigenvalues of
are all positive. The eigenvalues of
are
,
, and
for Equation (
13), and approximately
,
,
,
,
, and
for Equation (
14).
We used the Fourier spectral method for the spatial discretization and the discrete cosine transform in MATLAB was applied for the whole numerical simulations to solve the vCH equation with the zero Neumann boundary condition.
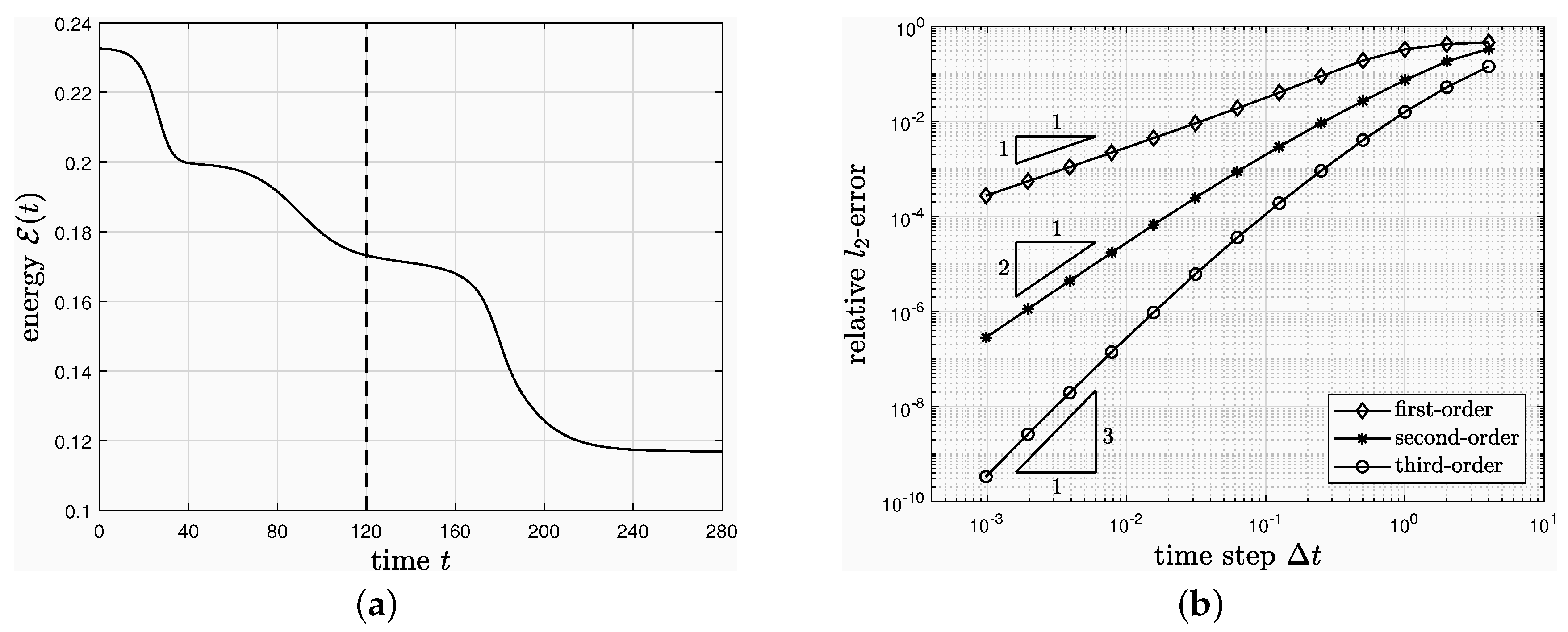
4.1. Convergence Test
We demonstrate the convergence of the proposed schemes with the initial conditions
on
. We set
and compute
for
. The grid size is fixed to
, which provides enough spatial accuracy. To estimate the convergence rate with respect to
, simulations are performed by varying
. We take the quadruply over-resolved numerical solution using the third-order scheme as the reference solution.
Figure 1a,b shows the evolution of
for the reference solution and the relative
-errors of
(this time is indicated by a dashed line in
Figure 1a) for various time steps, respectively. It is observed that the schemes give desired order of accuracy in time.
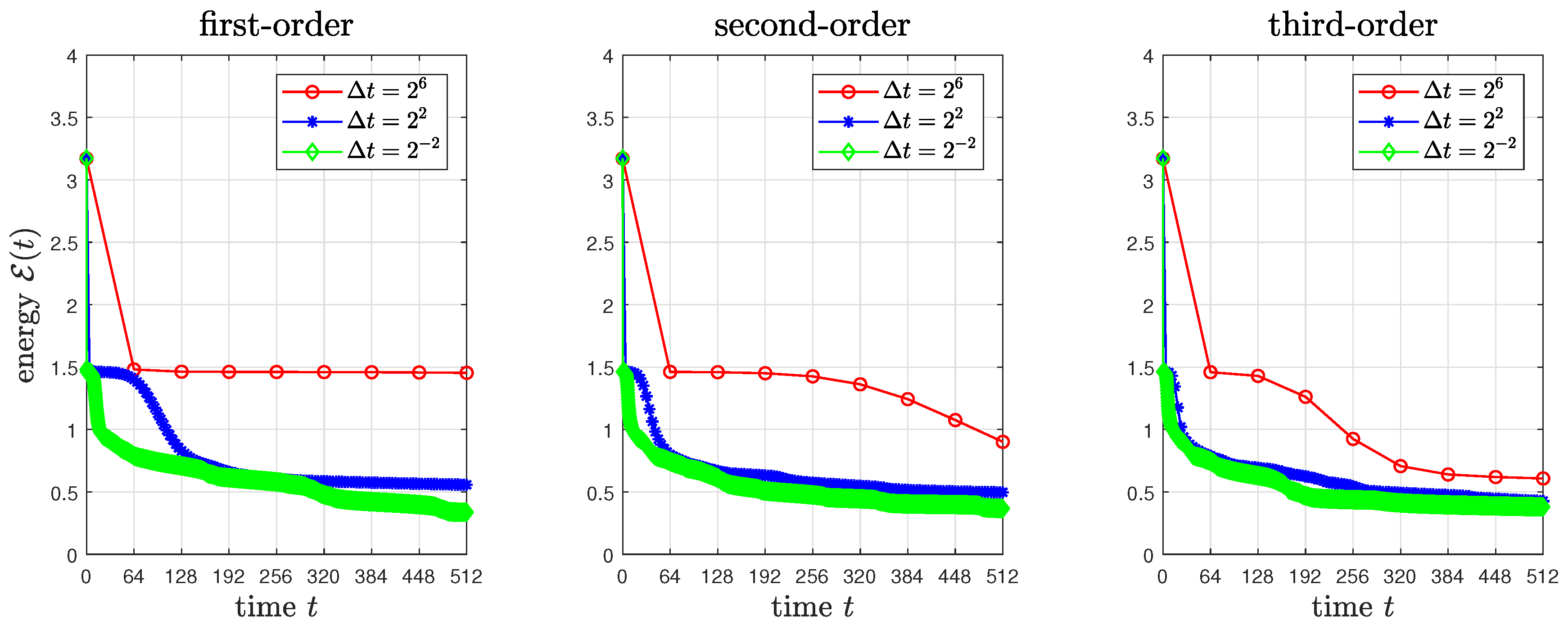
4.2. Energy Stability of the Proposed Schemes
To investigate the energy stability of the proposed schemes, we consider the phase separation of a ternary system with the initial conditions
on
. Here,
is a random number between
and
, and we use
and
.
Figure 2 shows the evolution of
using the first-, second-, and third-order schemes with different time steps. All energy curves are nonincreasing in time even for sufficiently large time steps.
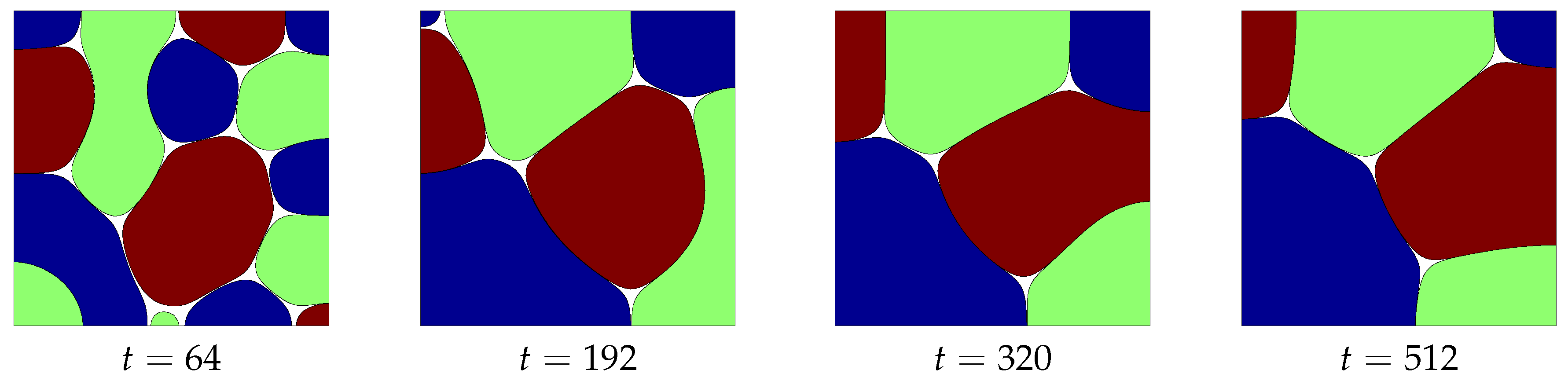
Figure 3 shows the evolution of
using the third-order scheme with
.
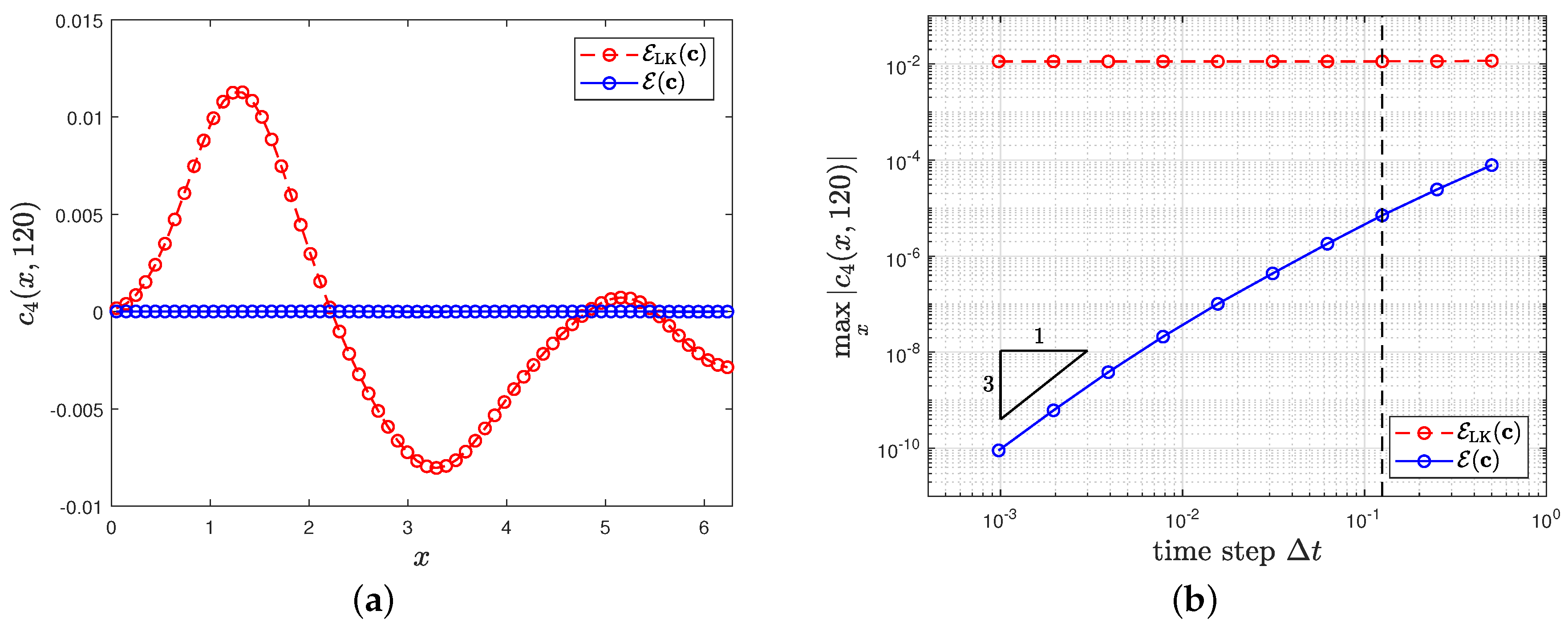
4.3. Consistency of Null-Phase
To confirm whether consistency of null-phase guarantees, we consider that only three phases are present but the simulation is performed using a quaternary system, i.e., we take the initial conditions as
on
. For
, we employ the convex splitting in [
17] and also apply the third-order scheme in Equation (
10) with
in (
14). We use
,
, and the third-order scheme and compute
for
.
Figure 4a,b shows
obtained with
and
for various time steps, respectively, for two models
and
. As shown in
Figure 4,
generates
, even though the initial condition for
is zero. We believe that this generation is not a result of numerical computation but a consequence of the model error not satisfying Criterion
A. On the other hand, for
, the maximum of
is only controlled by the accuracy of the numerical scheme.
4.4. No Additional Phase Generation on Interface
To test whether spurious phase generation takes place on interfaces, we consider the phase separation of a quaternary system with the initial conditions
on
. Here,
is a random number between
and
. For
, we employ the convex splitting in [
17] and also apply the third-order scheme in Equation (
10) with
in Equation (
14). We use
,
, and
.
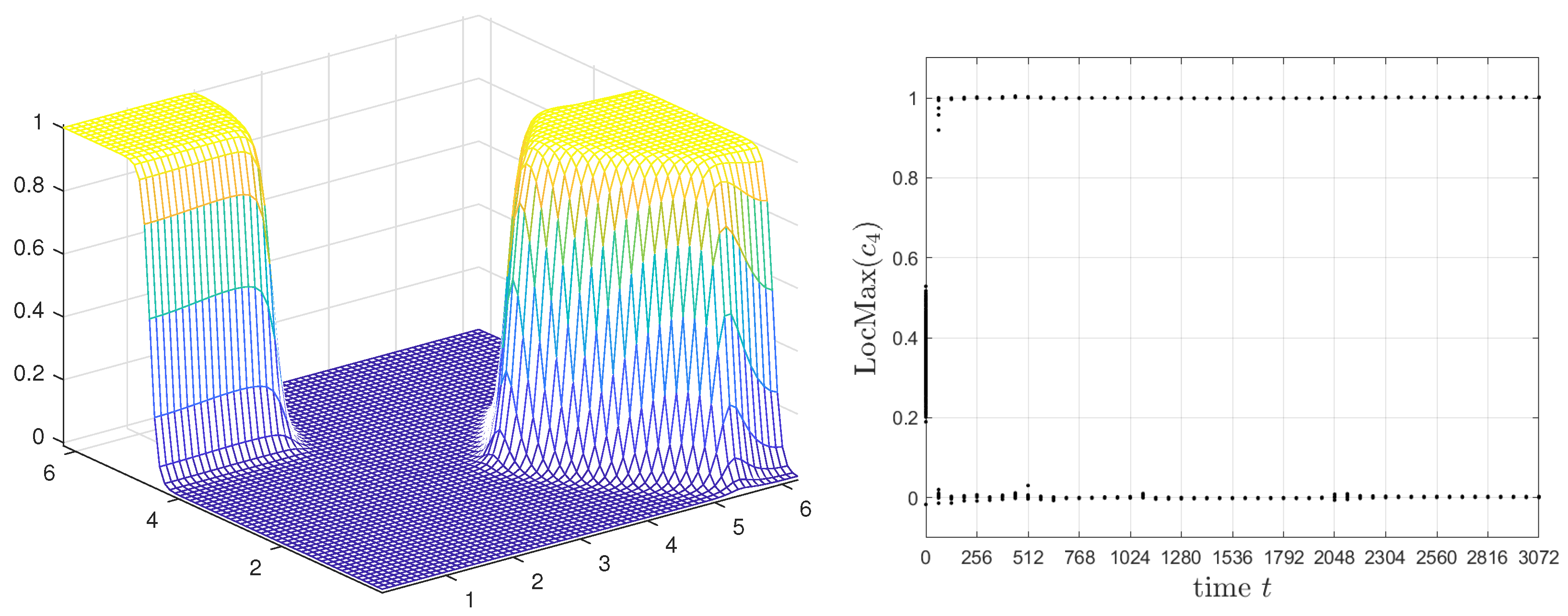
Figure 5 and
Figure 6 show
and local maximum of
for
using the third-order scheme for two models
and
, respectively.
As shown in
Figure 5,
generates spurious phase at two triple junction points where the first, second, and third components meet. On the other hand,
in
Figure 6 suppresses the formation of spurious phases on interfaces almost completely. To quantify the spurious phase generation, we define
at time
t as a set of local maxima of
in
. We observe many local maxima near
at the beginning of evolution but only two maxima 0 and 1 are expected for the fully separated phases. The model with
shown in
Figure 6 gives well separated phases over time, whereas the model with
has another local maximum at about
due to the spurious phases at the junction points. We believe that this spurious phases generation is not a result of numerical computation but a consequence of the model error not satisfying Criterion
B.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





