On a Vector Modified Yajima–Oikawa Long-Wave–Short-Wave Equation



Abstract
1. Introduction
2. Lax Pair and Riccati Equations
3. Darboux Transformations
4. Exact Solutions
4.1. Case 1. Solutions of the Two-Component mYOLS Equation (10)
4.2. Case 2. Solutions of Three-Component mYOLS Equation (11)
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Nishikawa, K.; Hojo, H.; Mima, K.; Ikezi, H. Coupled nonlinear electron-plasma and ion-acoustic waves. Phys. Rev. Lett. 1974, 33, 148–151. [Google Scholar] [CrossRef]
- Kawahara, T.; Sugimoto, N.; Kakutani, T. Nonlinear interaction between short and long capillary-gravity waves. J. Phys. Soc. Jpn. 1975, 39, 1379–1386. [Google Scholar] [CrossRef]
- Gibbon, J.; Thornhill, S.G.; Wardrop, M.J.; Ter Haar, D. On the theory of Langmuir solitons. J. Plasma Phys. 1977, 17, 153–170. [Google Scholar] [CrossRef]
- Funakoshi, M.; Oikawa, M. The resonant interactions between a long internal gravity wave and asurface gravity wave packet. J. Phys. Soc. Jpn. 1983, 52, 1982–1995. [Google Scholar] [CrossRef]
- Yajima, N.; Oikawa, M. Formation and interaction of sonic-Langmuir solitons–inverse scattering method. Progr. Theoret. Phys. 1976, 56, 1719–1739. [Google Scholar] [CrossRef]
- Ma, Y.C. The complete solution of the long-wave - short-wave resonance equations. Stud. Appl. Math. 1978, 59, 201–221. [Google Scholar] [CrossRef]
- Zabolotskii, A.A. Inverse scattering transform for the Yajima-Oikawa equations with nonvanishing boundary conditions. Phys. Rev. A 2009, 80, 063616. [Google Scholar] [CrossRef]
- Leble, S.B.; Ustinov, N.V. Darboux transforms, deep reductions and solitons. J. Phys. A 1993, 26, 5007–5016. [Google Scholar] [CrossRef]
- Newell, A.C. Long waves-short waves: A solvable model. SIAM J. Appl. Math. 1978, 35, 650–664. [Google Scholar] [CrossRef]
- Newell, A.C. The general structure of integrable evolution equations. Proc. Roy. Soc. Lond. Ser. A 1979, 365, 283–311. [Google Scholar] [CrossRef]
- Roy Chowdhury, A.; Chanda, P.K. To the complete integrability of long-wave-short-wave interaction equations. J. Math. Phys. 1986, 27, 707–709. [Google Scholar] [CrossRef]
- Liu, Q.P. Modifications of k-constrained KP hierarchy. Phys. Lett. A 1994, 187, 373–381. [Google Scholar] [CrossRef]
- Chowdhury, A.; Tataronis, J.A. Long wave-short wave resonance in nonlinear negative refractive index media. Phys. Rev. Lett. 2008, 100, 153905. [Google Scholar] [CrossRef] [PubMed]
- Ling, L.M.; Liu, Q.P. A long waves-short waves model: Darboux transformation and soliton solutions. J. Math. Phys. 2011, 52, 053513. [Google Scholar] [CrossRef]
- Geng, X.G.; Wang, H. Algebro-geometric constructions of quasi-periodic flows of the Newell hierarchy and applications. IMA J. Appl. Math. 2017, 82, 97–130. [Google Scholar] [CrossRef]
- Albert, J.; Bhattarai, S. Existence and stability of a two-parameter family of solitary waves for an NLS-KdV system. Adv. Diff. Equ. 2013, 18, 1129–1164. [Google Scholar]
- Guo, B.L.; Miao, C.X. Well-posedness of the Cauchy problem for the coupled system of the Schrödinger-KdV equations. Acta Math. Sin. 1999, 15, 215–224. [Google Scholar] [CrossRef]
- Albert, J.; Angulo Pava, J. Existence ann stability of ground-state solutions of a Schrödinger-KdV system. Proc. Roy. Soc. Edinburgh Sect. A 2003, 133, 987–1029. [Google Scholar] [CrossRef]
- Corcho, A.; Linares, F. Well-posedness for the Schrödinger-Korteweg-de Vries system. Trans. Am. Math. Soc. 2007, 359, 4089–4106. [Google Scholar] [CrossRef]
- Guo, B.L.; Chen, L. Orbital stability of solitary waves of the long wave-short wave resonance equations. Math. Methods Appl. Sci. 1998, 21, 883–894. [Google Scholar] [CrossRef]
- Chen, J.C.; Feng, B.F.; Maruno, K.I.; Ohta, Y. The derivative Yajima-Oikawa system: Bright, dark soliton and breather solutions. Stud. Appl. Math. 2018, 141, 145–185. [Google Scholar] [CrossRef]
- Ablowitz, M.J.; Kaup, D.J.; Newell, A.C.; Segur, H. The inverse scattering transform-Fourier analysis for nonlinear problems. Stud. Appl. Math. 1974, 53, 249–315. [Google Scholar] [CrossRef]
- Ablowitz, M.J.; Segur, H. Solitons and the Inverse Scattering Transform; Society for Industrial and Applied Mathematics (SIAM): Philadelphia, PA, USA, 1981. [Google Scholar]
- Beals, R.; Coifman, R.R. Inverse scattering and evolution equations. Commun. Pure Appl. Math. 1985, 38, 29–42. [Google Scholar] [CrossRef]
- Rogers, C.; Schief, W.K. Bäcklund and Darboux Transformations: Geometry and Modern Applications in Soliton Theory; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar]
- Balakhnev, M.Y.; Demskoi, D.K. Auto-Bäcklund transformations and superposition formulas for solutions of Drinfeld-Sokolov systems. Appl. Math. Comput. 2012, 219, 3625–3637. [Google Scholar] [CrossRef]
- Matveev, V.B.; Salle, M.A. Darboux Transformations and Solitons; Springer: Berlin/Heidelberg, Germany, 1991. [Google Scholar]
- Geng, X.G. Lax pair and Darboux transformation solutions of the modified Boussinesq equation. Acta Math. Appl. Sin. 1988, 11, 324–328. [Google Scholar]
- Geng, X.G. Darboux transformation of the discrete Ablowitz-Ladik eigenvalue problem. Acta Math. Sci. (Engl. Ed.) 1989, 9, 21–26. [Google Scholar] [CrossRef]
- Geng, X.G.; Tam, H.W. Darboux transformation and soliton solutions for generalized nonlinear Schrödinger equations. J. Phys. Soc. Jpn. 1999, 68, 1508–1512. [Google Scholar] [CrossRef]
- Geng, X.G.; Lv, Y.Y. Darboux transformation for an integrable generalization of the nonlinear Schrödinger equation. Nonlinear Dynam. 2012, 69, 1621–1630. [Google Scholar] [CrossRef]
- Lou, S.Y.; Jia, M.; Tang, X.Y.; Huang, F. Vortices, circumfluence, symmetry groups, and Darboux transformations of the (2 + 1)-dimensional Euler equation. Phys. Rev. E 2007, 75, 056318. [Google Scholar] [CrossRef]
- Shi, Y.; Nimmo, J.J.C.; Zhang, D.J. Darboux and binary Darboux transformations for discrete integrable systems I, Discrete potential KdV equation. J. Phys. A 2014, 47, 025205. [Google Scholar] [CrossRef]
- Zhou, Z.X. Darboux transformations for the twisted so(p,q) system and local isometric immersion of space forms. Inverse Probl. 1998, 14, 1353–1370. [Google Scholar] [CrossRef]
- Li, C.X.; Nimmo, J.J.C. Darboux transformations for a twisted derivation and quasideterminant solutions to the super KdV equation. Proc. R. Soc. A 2010, 466, 2471–2493. [Google Scholar] [CrossRef]
- Chen, J.B.; Pelinovsky, D.E. Rogue periodic waves of the modified KdV equation. Nonlinearity 2018, 31, 1955–1980. [Google Scholar] [CrossRef]
- Zhang, G.Q.; Yan, Z.Y.; Wen, X.Y. Three-wave resonant interactions: Multi-dark-dark-dark solitons, breathers, rogue waves, and their interactions and dynamics. Physica D 2018, 366, 27–42. [Google Scholar] [CrossRef]
- Rao, J.G.; Porsezian, K.; He, J.S.; Kanna, T. Dynamics of lumps and dark-dark solitons in the multi-component long-wave-short-wave resonance interaction system. Proc. R. Soc. A 2018, 474, 20170627. [Google Scholar] [CrossRef]
- Zhao, H.Q.; Yuan, J.Y.; Zhu, Z.N. Integrable semi-discrete Kundu-Eckhaus equation: Darboux transformation, breather, rogue wave and continuous limit theory. J. Nonlinear Sci. 2018, 28, 43–68. [Google Scholar] [CrossRef]
- Geng, X.G.; Wu, J.P. Riemann-Hilbert approach and N-soliton solutions for a generalized Sasa-Satsuma equation. Wave Motion 2016, 60, 62–72. [Google Scholar] [CrossRef]
- Xu, J.; Fan, E.G. A Riemann-Hilbert approach to the initial-boundary problem for derivative nonlinear Schrödinger equation. Acta Math. Sci. Ser. B Engl. Ed. 2014, 34, 973–994. [Google Scholar] [CrossRef]
- Guo, B.L.; Ling, L.M. Riemann-Hilbert approach and N-soliton formula for coupled derivative Schrödinger equation. J. Math. Phys. 2012, 53, 073506. [Google Scholar] [CrossRef]
- Hirota, R. The Direct Method in Soliton Theory; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Geng, X.G.; Li, R.M.; Xue, B. A new integrable equation with peakons and cuspons and its bi-Hamiltonian structure. Appl. Math. Lett. 2015, 46, 64–69. [Google Scholar] [CrossRef]
- Lenells, J. Traveling wave solutions of the Camassa-Holm equation. J. Diff. Equ. 2005, 217, 393–430. [Google Scholar] [CrossRef]
- Geng, X.G.; Li, R.M. Darboux transformation of the Drinfeld-Sokolov-Satsuma-Hirota system and exact solutions. Ann. Phys. 2015, 361, 215–225. [Google Scholar] [CrossRef]
- Wazwaz, A.M. The Cole-Hopf transformation and multiple soliton solutions for the integrable sixth-order Drinfeld-Sokolov-Satsuma-Hirota equation. Appl. Math. Comput. 2009, 207, 248–255. [Google Scholar] [CrossRef]
- Wazwaz, A.M. Exact and explicit travelling wave solutions for the nonlinear Drinfeld-Sokolov system. Commun. Nonlinear Sci. Numer. Simul. 2006, 11, 311–325. [Google Scholar] [CrossRef]
- Yan, Z.Y. Abundant new explicit exact soliton-like solutions and Painlevé test for the generalized Burgers equation in (2+1)-dimensional space. Commun. Theor. Phys. (Beijing) 2001, 36, 135–138. [Google Scholar]
- Geng, X.G.; Liu, H. The nonlinear steepest descent method to long-time asymptotics of the coupled nonlinear Schrödinger equation. J. Nonlinear Sci. 2018, 28, 739–763. [Google Scholar] [CrossRef]
- Ma, W.X.; Zhou, Y. Lump solutions to nonlinear partial differential equations via Hirota bilinear forms. J. Diff. Equ. 2018, 264, 2633–2659. [Google Scholar] [CrossRef]
- Osborne, A.R. Nonlinear Ocean Waves and the Inverse Scattering Transform; Elsevier/Academic Press: Boston, MA, USA, 2010. [Google Scholar]
- Ruban, V.; Kodama, Y.; Ruderman, M.; Dudley, J.; Grimshaw, R.; McClintock, P.V.E.; Onorato, M.; Kharif, C.; Pelinovsky, E.; Soomere, T.; et al. Rogue waves–towards a unifying concept?: Discussions and debates. Eur. Phys. J. Special Top. 2010, 185, 5–15. [Google Scholar] [CrossRef]
- Bludov, V.Y.; Konotop, V.V.; Akhmediev, N. Matter rogue waves. Phys. Rev. A 2009, 80, 033610. [Google Scholar] [CrossRef]
- Solli, D.R.; Ropers, C.; Koonath, P.; Jalali, B. Optical rogue waves. Nature 2007, 450, 1054–1057. [Google Scholar] [CrossRef]
- Shats, M.; Punzmann, H.; Xia, H. Capillary rogue waves. Phys. Rev. Lett. 2010, 104, 104503. [Google Scholar] [CrossRef] [PubMed]
- Onorato, M.; Residori, S.; Baronio, F. (Eds.) Rogue and Shock Waves in Nonlinear Dispersive Media; Springer: Basel, Switzerland, 2016. [Google Scholar]
- Wang, X.; Liu, C.; Wang, L. Rogue waves and W-shaped solitons in the multiple self-induced transparency system. Chaos 2017, 27, 093106. [Google Scholar] [CrossRef] [PubMed]
- Rao, J.G.; Wang, L.H.; Liu, W.; He, J.S. Rogue-wave solutions of the Zakharov equation. Theoret. Math. Phys. 2017, 193, 434–454. [Google Scholar] [CrossRef]
- Chan, H.N.; Malomed, B.A.; Chow, K.W.; Ding, E. Rogue waves for a system of coupled derivative nonlinear Schrödinger equations. Phys. Rev. E. 2016, 93, 012217. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Liu, C.; Wang, L. Darboux transformation and rogue wave solutions for the variable-coefficients coupled Hirota equations. J. Math. Anal. Appl. 2017, 449, 1534–1552. [Google Scholar] [CrossRef]
- Wei, J.; Wang, X.; Geng, X.G. Periodic and rational solutions of the reduced Maxwell-Bloch equations. Commun. Nonlinear Sci. Numer. Simul. 2018, 59, 1–14. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Solution | Figure | ||||||
|---|---|---|---|---|---|---|---|
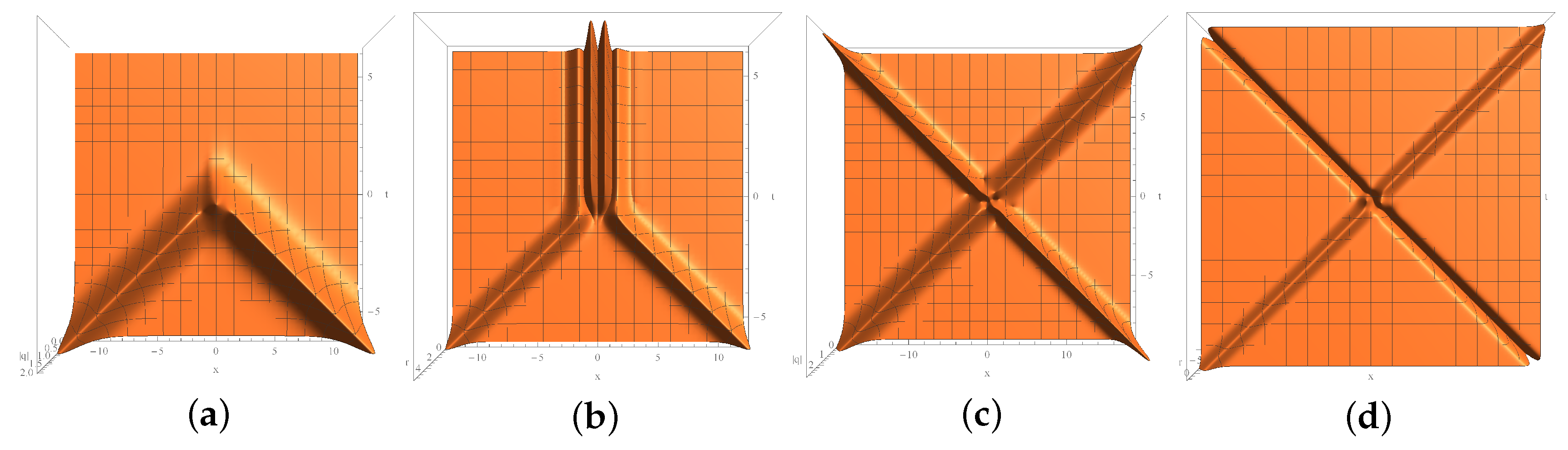
| 3 | Figure 2c,d | 1 | 0 | 0 | 1 | ||
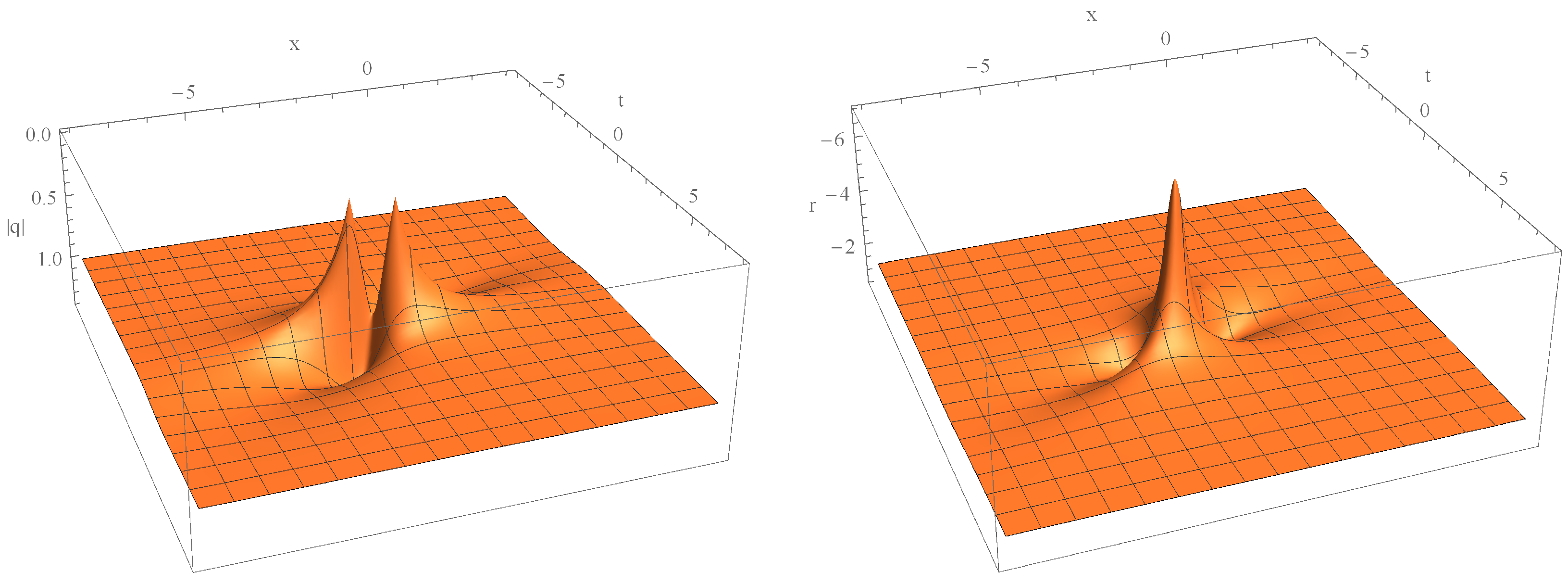
| 4 | Figure 4a,b | 1 | 1 | 0 | 0 | ||
| 5 | Figure 4c,d | 1 | 1 | 1 | 1 | ||
| 6 | Figure 4e,f | 1 | 1 | 1 | 1 | ||
| 7 | Figure 4g,h | ||||||
| 8 | Figure 4i,j | ||||||
| 9 | Figure 4k,l |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Geng, X.; Li, R. On a Vector Modified Yajima–Oikawa Long-Wave–Short-Wave Equation. Mathematics 2019, 7, 958. https://doi.org/10.3390/math7100958
Geng X, Li R. On a Vector Modified Yajima–Oikawa Long-Wave–Short-Wave Equation. Mathematics. 2019; 7(10):958. https://doi.org/10.3390/math7100958
Chicago/Turabian StyleGeng, Xianguo, and Ruomeng Li. 2019. "On a Vector Modified Yajima–Oikawa Long-Wave–Short-Wave Equation" Mathematics 7, no. 10: 958. https://doi.org/10.3390/math7100958
APA StyleGeng, X., & Li, R. (2019). On a Vector Modified Yajima–Oikawa Long-Wave–Short-Wave Equation. Mathematics, 7(10), 958. https://doi.org/10.3390/math7100958