1. Introduction
Geometric frustration is the failure of local order to propagate freely throughout space, where local order refers to a local arrangement of geometric shapes, and free propagation refers to the filling of the space with copies of this arrangement without gaps, overlaps, or distortion [
1]. Classical examples include 2D pentagonal order and 3D icosahedral order, where the dihedral angle of the unit cell does not divide
, and therefore it is not compatible with the translations [
1]. A traditional solution to relieve the frustration in
nD is to curve the space into
D so that the vertices of the prototiles (pentagons in the 2D example) all land on an n-sphere (dodecahedron) and the discrete curvature is concentrated at the joints between prototiles (dodecahedral edges and vertices). This eliminates the deficit in the dihedral angle to close a circle. As in the above example, pentagonal order can propagate freely on a two-sphere, for example a dodecahedron or icosahedron, while icosahedral order can propagate freely on a three-sphere, for example, a 600-cell or 120-cell. This hypersphere solution, described more fully in
Section 2, gives only a finite propagation of the local order, since the spherical space is finite, but sections of intersecting hyperspheres can be used as building blocks to achieve infinite propagation, resulting in quasicrystalline order (for a comprehensive study of geometric frustration and its treatment with discrete curvature, see Reference [
1]).
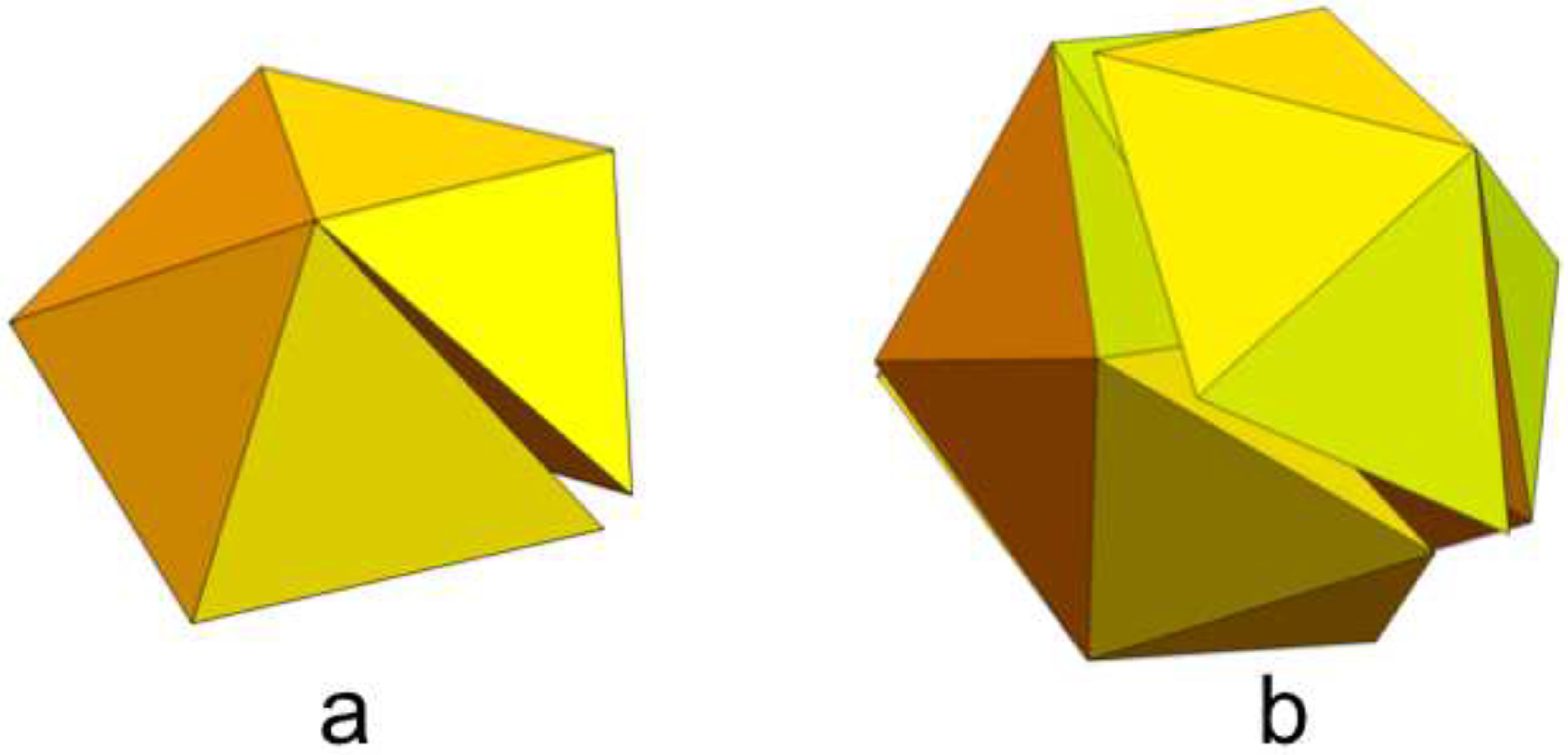
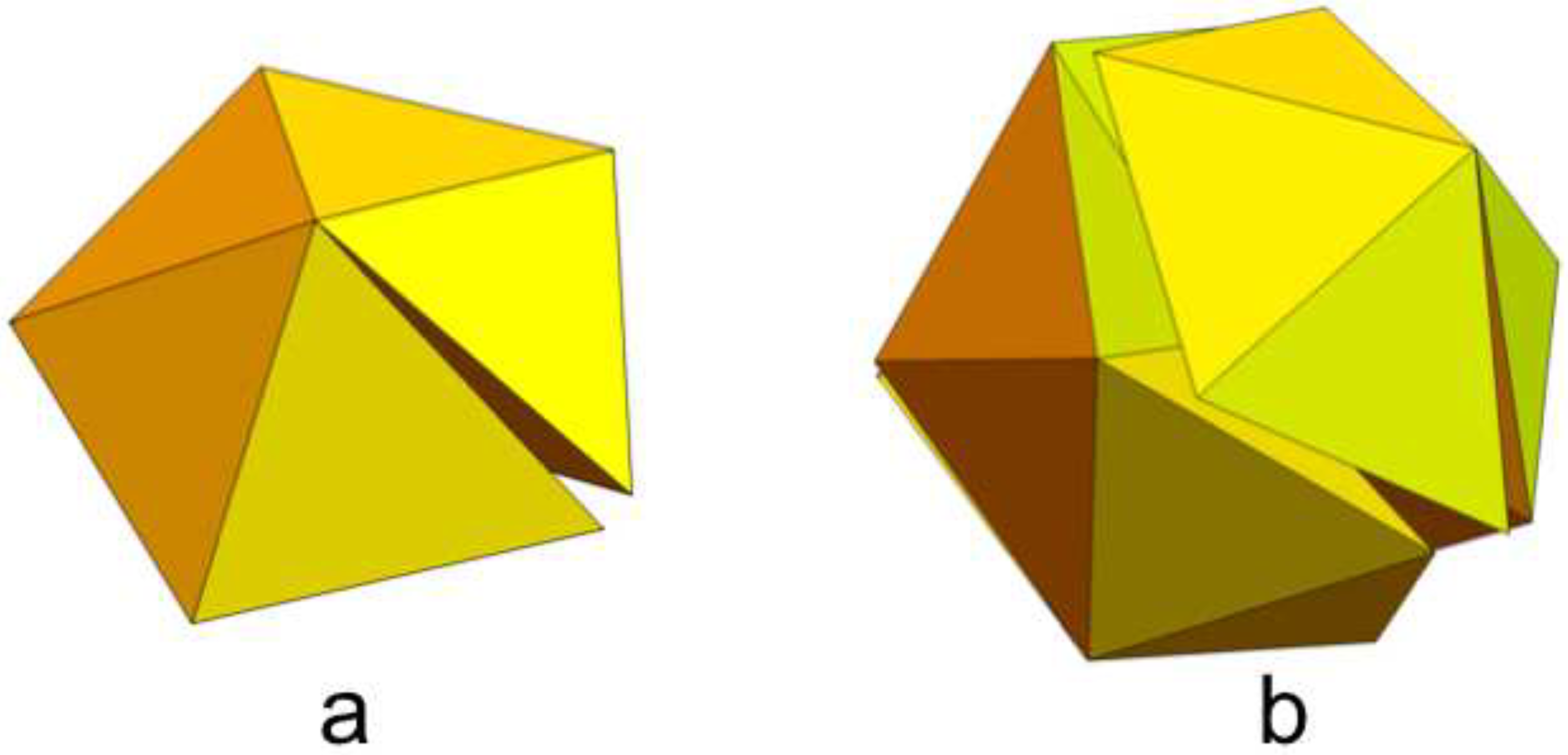
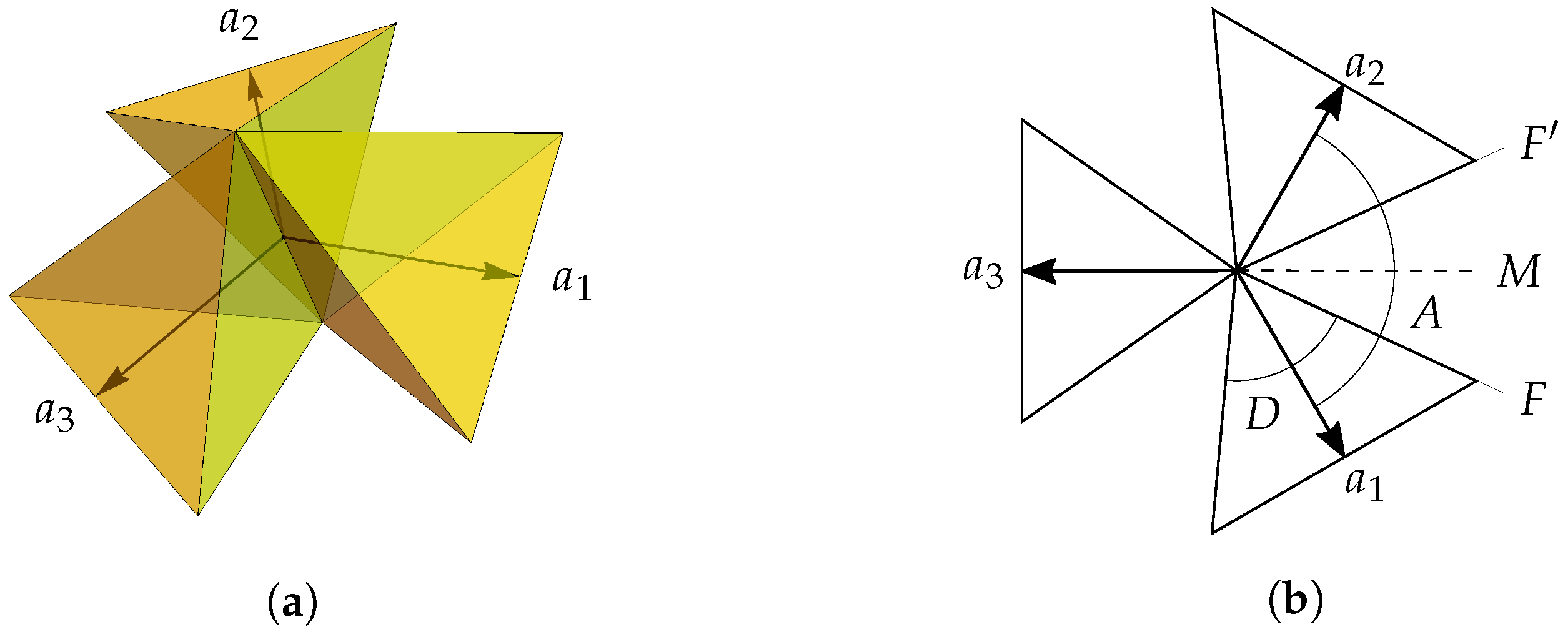
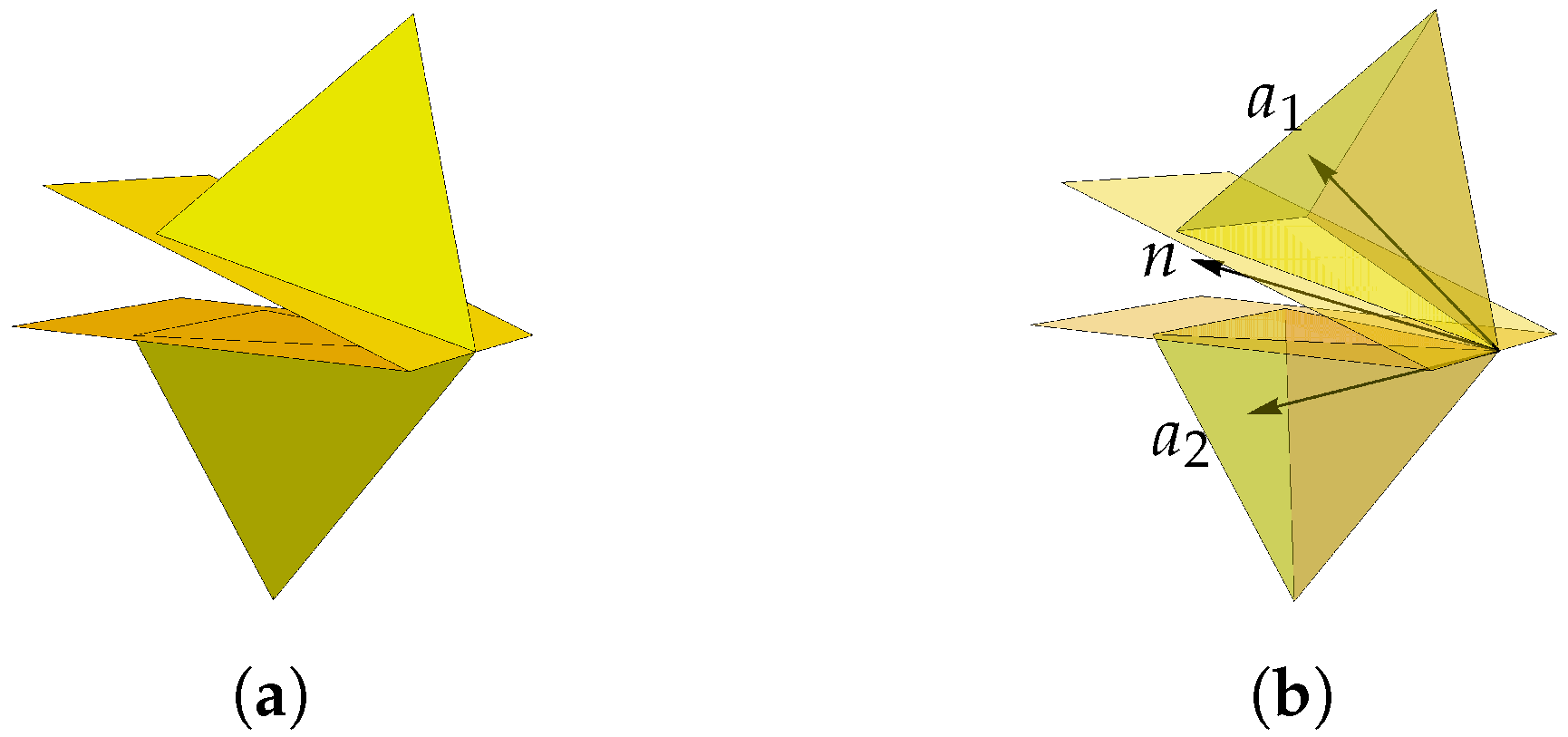
A case of particular interest is that of tetrahedral packings in 3D. For regular tetrahedra, the dihedral angle of
does not divide
, thus leaving gaps between them when arranged in edge-sharing (
Figure 1a) or vertex-sharing (
Figure 1b) configurations. The presence of these gaps, i.e., the geometric frustration, means they cannot tile 3D space. However, the tetrahedron configuration is the densest local sphere packing in 3D, and often gives the lowest energy state for four atoms. The packing of regular tetrahedra is therefore a non-trivial problem that is of interest to chemists and physicists, as well as mathematicians [
2].
Given some edge- or vertex-sharing cluster of polyhedra such as that shown in
Figure 1, one way to close the gaps isometrically (i.e., without distorting the polyhedra) is to discretely curve the space, as mentioned above. It turns out, however, that this is not the only way. For a particular vertex-sharing configuration, Fang et al. [
3] showed an alternative called the
twist method, an isometry on the tetrahedra that closes the gaps without recourse to a fourth dimension. In their approach, which we review in
Section 2 and
Section 3, each tetrahedron is rotated in 3D around an individual axis; with the correct choice of axes and rotation angles, adjacent face planes of neighbouring tetrahedra are made to coincide, although the faces themselves do not exactly coincide within those planes. In a second paper from Fang et al. [
4], the twist method was used, among other methods, to construct a novel quasicrystal.
In this paper, we show that the twist method works quite generally to close gaps between face planes for polyhedron clusters with any dihedral angle and gap size. We derive a general formula for the required twisting angle, as well as for the bending angle required in the discrete curvature method, with the surprising result that the angles are the same. Furthermore, the twist’s misalignment of faces within a shared plane is actually an analogue of the discrete curvature’s dihedral angle between polyhedra, and we derive expressions for these angles, showing that they also match. Due to the complicated nature of the rotations, especially involving higher dimensions, we include illustrations and detailed explanations in the hope that this will make our constructions more clear.
The paper is organized as follows.
Section 2 provides a more detailed description of the discrete curvature and the twist methods, and
Section 3 explains the connection between them. In
Section 4, we construct the transformations for the two methods and derive their matching formulae for the transformation and joint angles, respectively. In
Section 5, we briefly discuss the possibility of global extension. An appendix is included where we use the results of
Section 4 to compute the transformation and joint angles for a few examples of tetrahedra in edge-sharing and vertex-sharing configurations. Similar calculations can be applied to any symmetric cluster of polyhedra.
2. Description of Discrete Curvature and Twist Methods
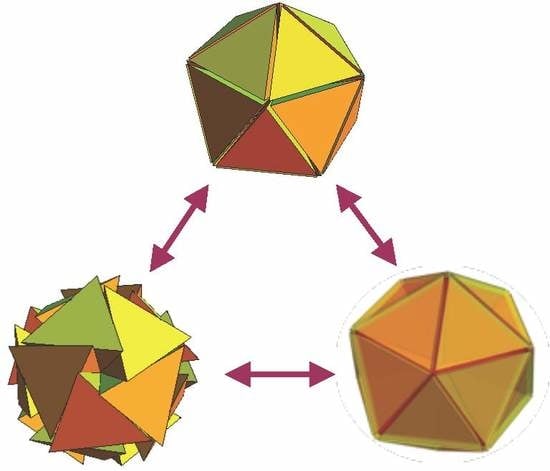
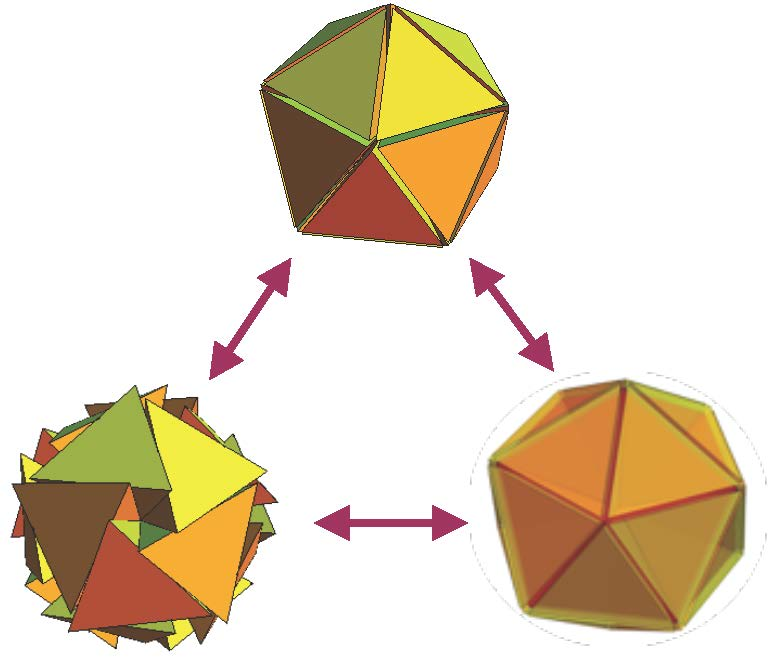
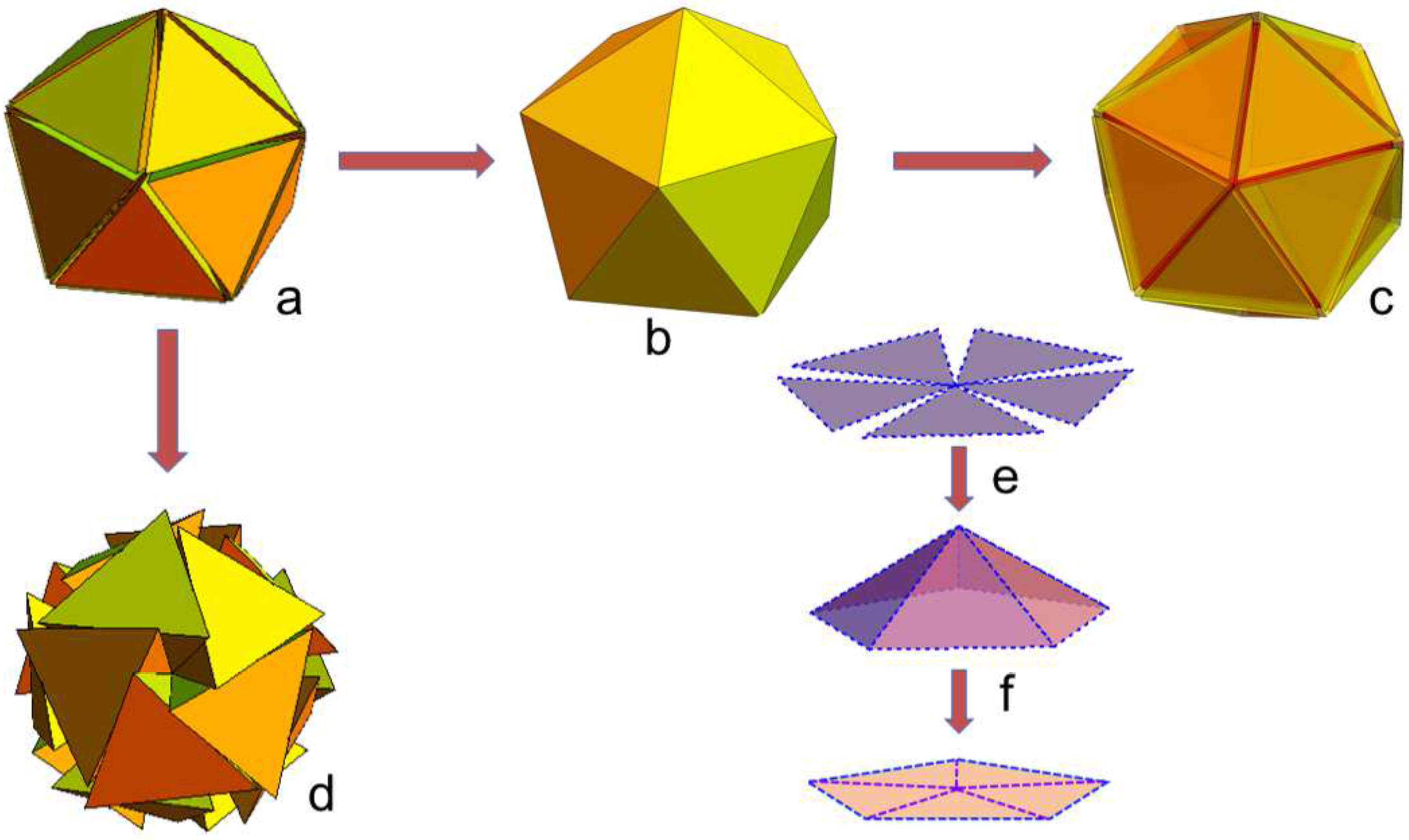
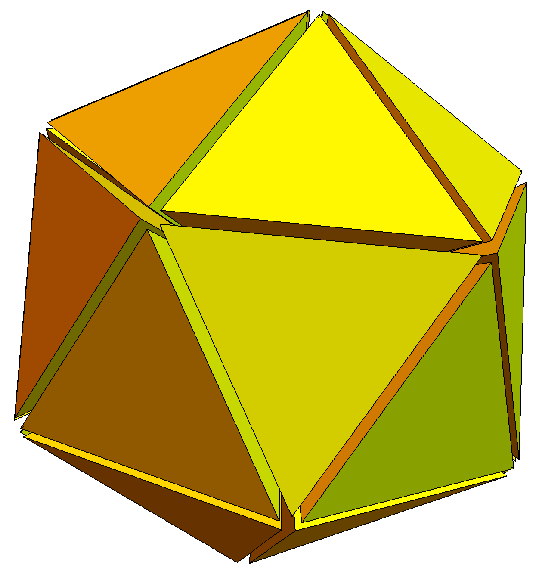
A cluster of congruent polyhedra with a shared vertex or edge can be symmetrically arranged so that the gaps between them are evenly distributed.
Figure 2a shows such an arrangement of 20 regular tetrahedra sharing a vertex. The other images in
Figure 2 illustrate how the gaps can be closed, while maintaining congruence of the tetrahedra, by discrete curvature (
Figure 2b), distortion (
Figure 2c), or twist (
Figure 2d). We mention distortion because it is the result of the 3D projection of discrete curvature, and it can be important in atomic configurations, but, in this paper, we restrict our attention to the relation between the isometric methods, which close the gaps by some type of rotation.
In these isometric methods, the angle by which the polyhedra are rotated from the symmetric, gapped configuration is called the transformation angle. When the gaps are closed, each pair of neighbouring polyhedra meets in a plane, but deviates by some joint angle from being simple reflections of each other across that plane. For each case these angles are described in more detail below.
2.1. Discrete Curvature
Discretely curving the space permits unhindered propagation of the local pattern with all vertices free of imperfect local symmetries. However, this method requires an extra dimension. For example, the 20-tetrahedron cluster in
Figure 2a can be bent into the 4th dimension to close all the gaps between tetrahedra, while keeping their shared vertex invariant (an analogue from 2D to 3D is shown in
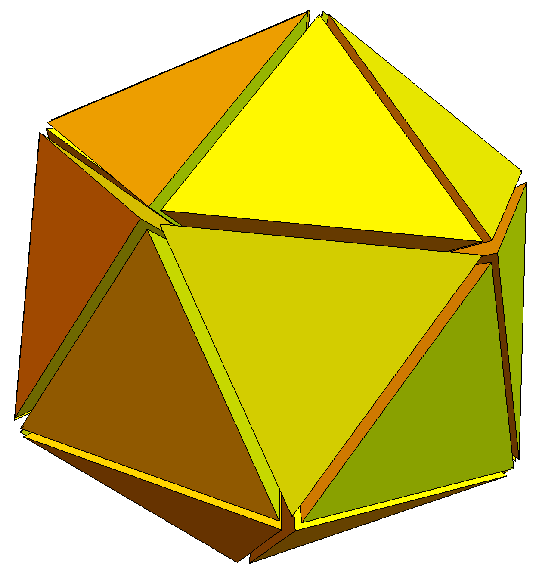
Figure 2e). As the gaps close, the tetrahedra form a sort of pyramidal cap around this vertex. The outer faces of the tetrahedra constitute the rim of this cap and form an icosahedron; they are shown in
Figure 2b, which is a slice through the 3D space containing the rim. The vertex of the cap is not at the 3D centre of
Figure 2b, but is displaced out in the 4th dimension. Compare this to
Figure 2f, where the outer edges of the triangles form a pentagon in a 2D plane while the shared vertex point is displaced out of that plane.
The transformation angle here is the angle by which each tetrahedron rotates into the fourth dimension, and it can be positive or negative, corresponding to bending up or down in 4D. When the faces meet, the joint angle is the dihedral angle between adjacent tetrahedra. At that point, the original geometric frustration of the gapped configuration has vanished, but an encoding of it remains in the form of this joint angle.
With the 20 tetrahedra arranged to form the pyramidal cap, all their vertices (including the central, shared vertex) belong to a 3-sphere that lives in 4D. Their local icosahedral pattern can propagate freely on the 3-sphere until it forms a 4D polytope, the 600-cell, each of whose 120 vertices is surrounded by a 20-tetrahedron cluster in the configuration of
Figure 2b. Because the 600-cell is a discretized version of the 3-sphere, with the curvature concentrated in discrete amounts at edges and vertices, we refer to this as having discrete curvature. That is not to say that the space of an individual tetrahedron is curved: rather, it is the space of the whole cluster that is curved, with that curvature being concentrated at the joints between tetrahedra.
2.2. Twist
As an alternative to bending the cluster into the fourth dimension, one may close the gaps between face planes by twisting the cluster in 3D. Each tetrahedron in
Figure 2a can be rotated around an axis which connects its centroid with the shared vertex, leading to configuration
Figure 2d, as was previously shown by Fang et al. [
5]. Other examples are given in the following section, with illustrations in
Table 1 (an interactive dynamic illustration is available online, please check the
Supplementary Materials). We use the name “twist method” because tetrahedra on opposite sides of the cluster are rotated in opposite senses relative to each other, giving the cluster a twisted structure. The transformation angle is again the angle by which each tetrahedron is rotated, and it can be positive or negative, resulting in either a left- or right-handed twisted cluster.
One can see in
Figure 2d that the gap between adjacent faces is closed, while the gap between a group of neighbouring edges is enlarged into an empty pentagonal cone. This empty cone results from the fact that the two triangular faces in a given shared plane are misaligned. The angular difference between them is the joint angle, which, as in the case of discrete curvature, encodes the geometric frustration. In the pentagonal cone, the joint angle is manifest as the apex angle of a triangular face.
3. Equivalence between the Discrete Curvature and Twist Methods
The discrete curvature and twist methods are characterized by their transformation angles for closing the gaps and their joint angles encoding the geometric frustration. We initially noticed that, for the 20-tetrahedron cluster, both these angles are the same in the one case as in the other (in fact, both transformation angles equal the angle of R. Buckminster Fuller’s jitterbug rotation [
6], although at present it is not clear why this should be so). This motivated further study of similar cases, wherein regular tetrahedra are arranged about a single shared edge or vertex in clusters of two-, three-, four- or fivefold symmetry. In each case the gaps between tetrahedral faces can be closed either by bending up to 4D or by twisting in 3D. The twisting is illustrated in the first four rows of
Table 1, with dynamic versions online in the
Supplementary Materials. (We ignore the twofold cluster because it is degenerate, although technically the results still apply).
To each twisted edge-sharing cluster, there corresponds a twisted vertex-sharing cluster that preserves the relative orientations of the tetrahedra and the axial symmetry.
Table 1 shows that the twisted 20-tetrahedron cluster, denoted as 20 G, is a composition of twisted vertex-sharing fivefold clusters, and the vertex-sharing threefold cluster is a subset of this 20 G. Furthermore, the twisted vertex-sharing fourfold cluster has eight tetrahedra, with four in one orientation corresponding to a subset of the left-handed 20 G and the other four in the other orientation corresponding to a subset of the right-handed 20 G.
If one begins with the symmetrically gapped configuration, one can transform, by rotations in appropriate planes, to either the 20 G (3D twisted configuration) or the vertex cap of a 600-cell (4D curved configuration). In both cases, the number of tetrahedra sharing a common edge (or edge centre) is five, and the number sharing a common vertex is twenty. Moreover, the transformation angles in each case are the same, as are the resulting joint angles. We therefore refer to the 600-cell vertex cap as a 4D analogue of the 20 G. Similarly, the 16-cell vertex cap is the 4D analogue of the fourfold case, and the 5-cell vertex cap is the 4D analogue of the threefold case. In the twisting angle row of
Table 1,
E denotes the twisting angle of the tetrahedron around an axis connecting the midpoints of its central and peripheral edges to close the edge sharing cluster,
V denotes the transformation angle to close the vertex-sharing cluster, and
F denotes the joint angle where faces meet. For the angles in the 4D analogues,
B denotes the transformation angle (the bending angle to close the gaps) and
D the joint (dihedral) angle. In all three cases, both the transformation angle and the joint angle match, i.e.,
and
. This finding implies that, at least locally, there is a perfect equivalence between encoding geometric frustration using the discrete curvature method and the twisting method.
4. Angle Matching between Discrete Curvature and Twist Transformations
In this section, we explicitly construct the transformations for the discrete curvature and twist methods, and show the equivalence of the respective angles. We use the Clifford algebra formalism because it is a clean and efficient algebraic encoding of geometric concepts. (Expressions for the transformation and joint angles can also be found by visualizing the structures and applying trigonometry, but Clifford algebra provides a more systematic way to articulate the construction. For the interested reader unfamiliar with Clifford algebra, useful introductions were provided in [
7,
8,
9], and monograph references are in [
10,
11,
12]). The transformations are constructed in parallel to exhibit not only the isogonism between the two methods, but also the parallel aspects in the geometric structure which are the cause of that isogonism.
We begin by defining intersecting bivectors F and , representing the face planes of two neighbouring polyhedra, as well as a number of auxiliary geometric elements. We then construct the two rotations—the twist in 3D and the discrete curve in 4D—showing that for some angle each transforms F and into the same bivector. From this, we compute the transformation and joint angles, and show their respective equivalence.
4.1. The Geometric Elements
4.1.1. Basic Definitions
Let
be the geometric algebra of
with unit right-handed pseudoscalar
I, and let
be a unit vector orthogonal to
I (and thus not in
). Thus
I and
span an
with geometric algebra
and unit pseudoscalar
. In
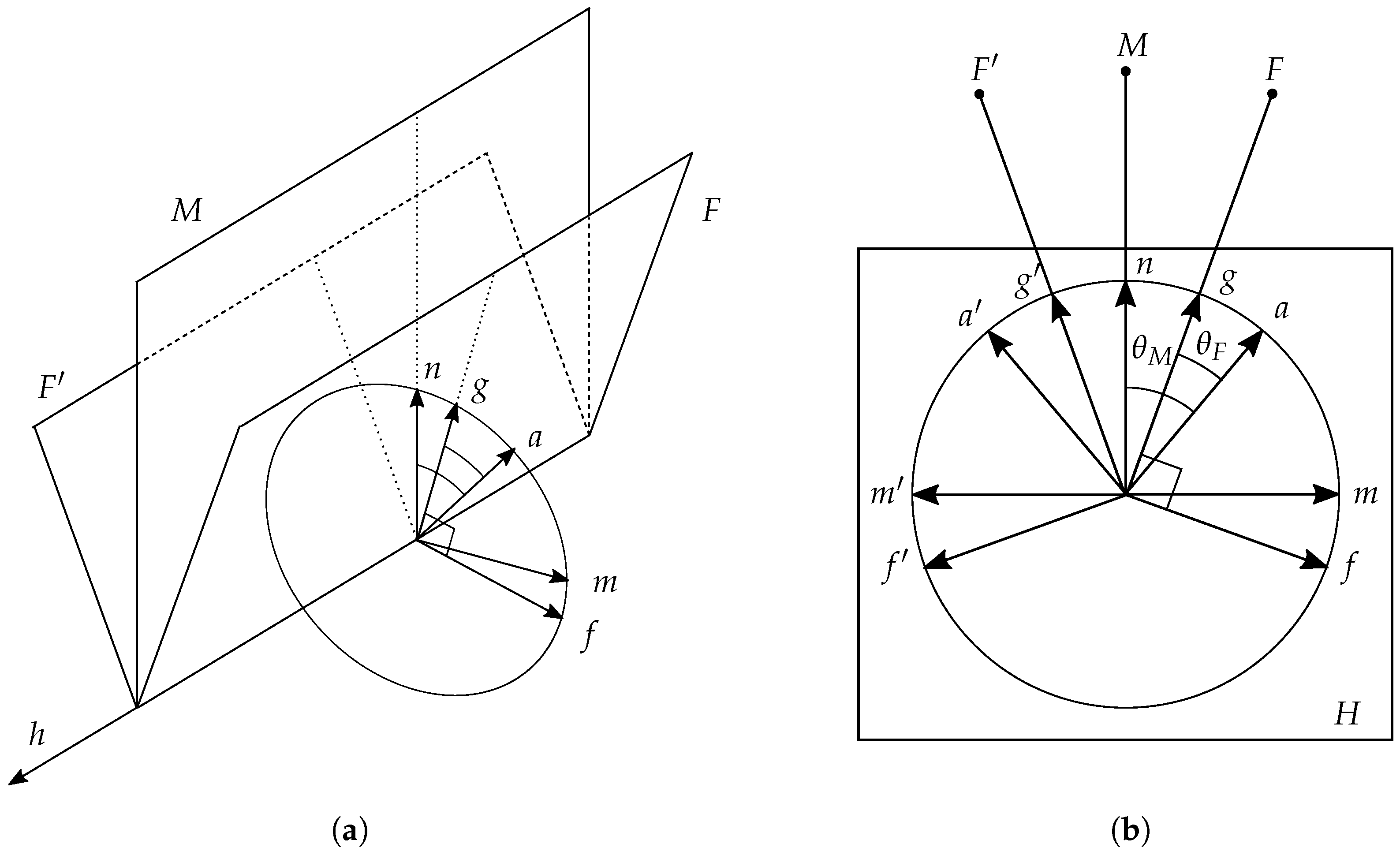
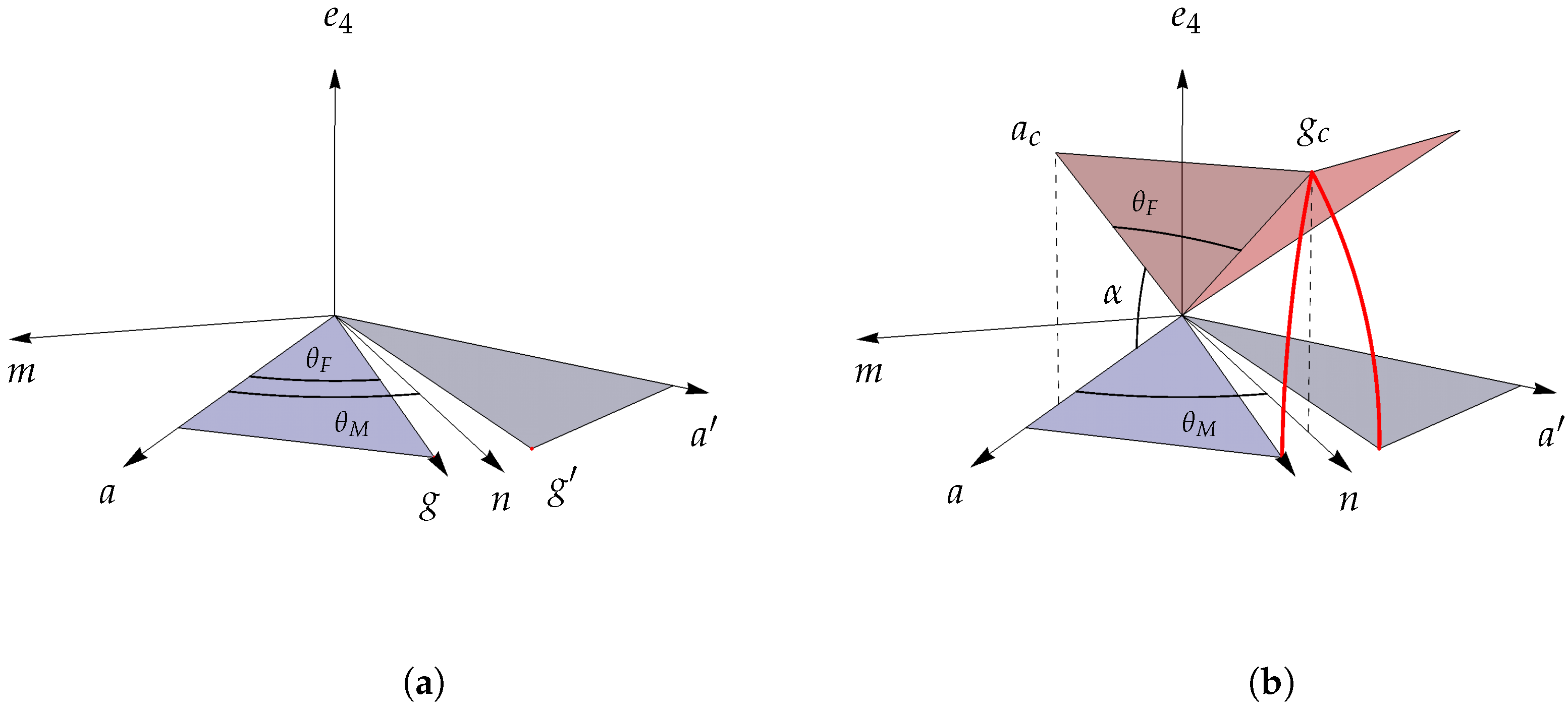
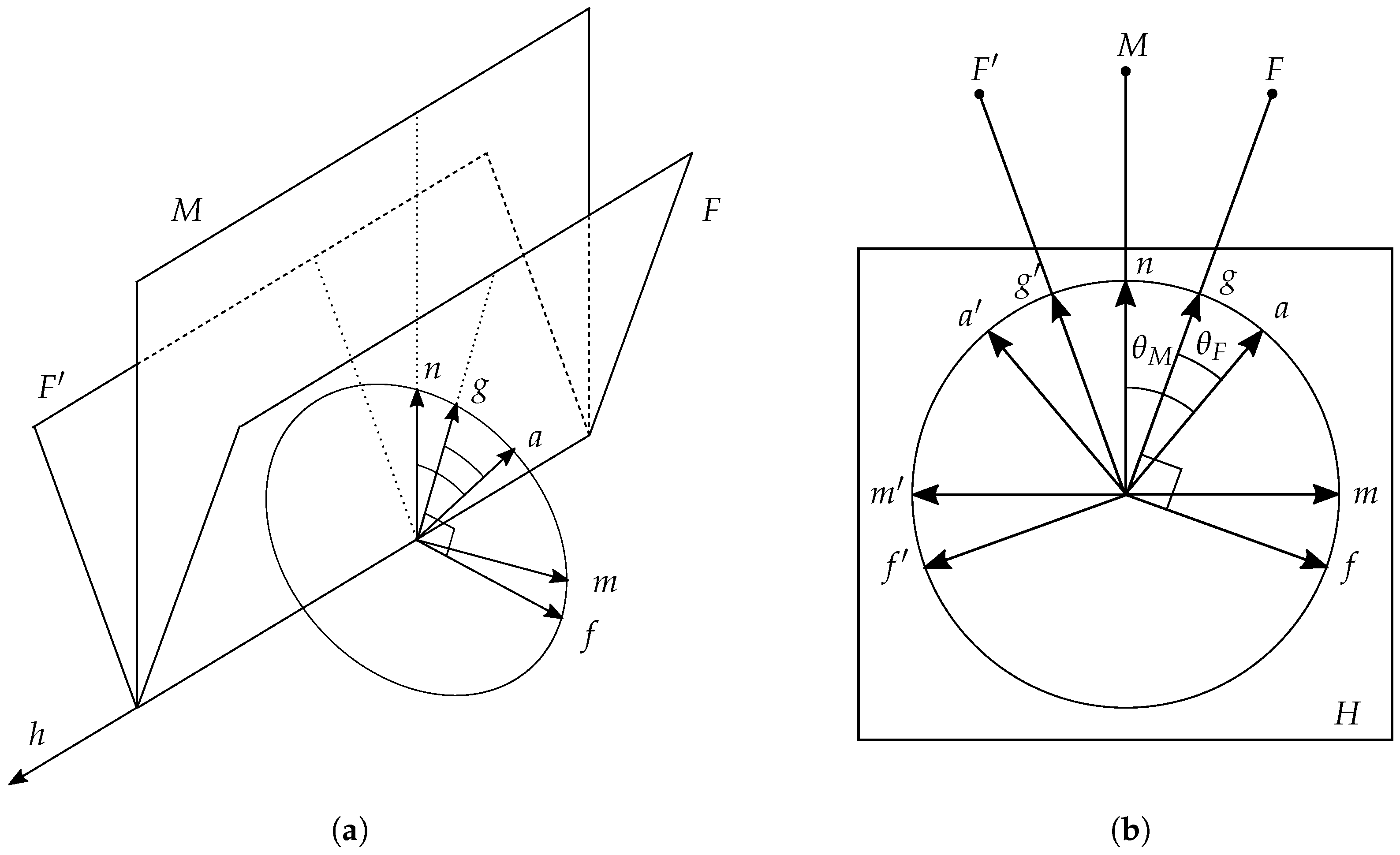
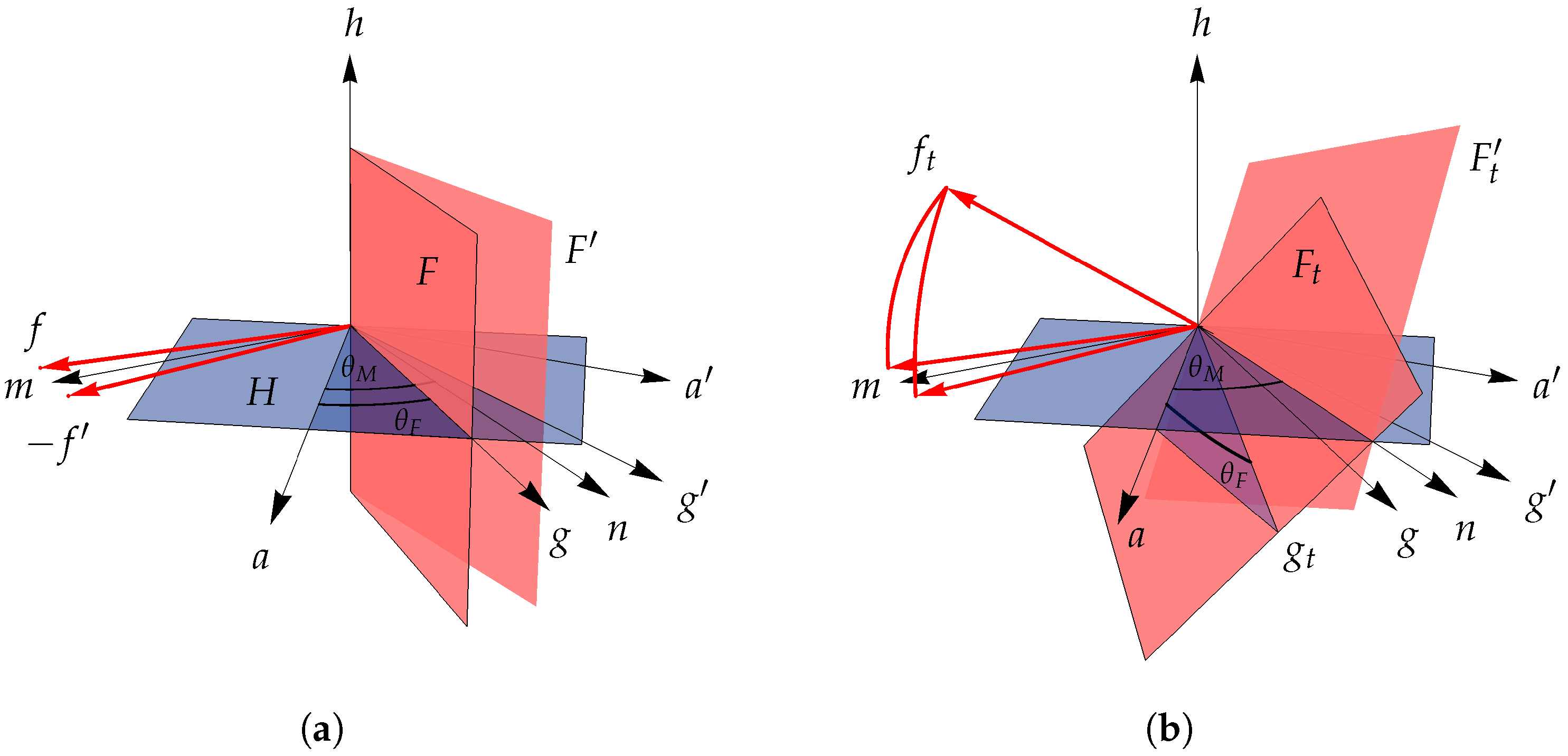
we denote the geometric (or Clifford) product by juxtaposition, with the inner and outer products indicated respectively by · and ∧. We define the following elements, which are illustrated in
Figure 3.
In , let F and be distinct unit bivectors with a common unit vector h (all bivectors defined here and after are actually 2-blades, or “simple” bivectors, being factorizable as the product of two vectors).
Let unit vectors g and be defined by and . Since the bivectors are distinct, . Assume F and are oriented such that (if gives a left-handed trivector, swap the labels of F and to make it right handed).
Let unit vectors f and be defined by , . Thus, f and are the respective normals to F and within the 3-space of I, but with opposite handedness.
Let be a unit bivector.
We define the unit vector
, used to generate reflections which are important for the discrete curvature transformation. Its normal in the
H plane is
, while its normal in
I is the mirror plane
. We call
M the “mirror” because
is the reflection of
F in it (
Section 4.1.2, Equation (
2)). The mirror in
J (i.e., in
) is
, the hyperplane normal to
m.
Now within H, we choose any unit vector a lying between g and m, and define the angles and between a and the bivectors F and M, respectively. Equivalently, these are the respective angles a makes with g and n. We define also as the counterpart to a, reflected by m.
4.1.2. Reflections
For an arbitrary even or odd grade multivector
A, a reflection in the subspace normal to
m (briefly, a reflection by
m) is given by
, where the sign is positive or negative according as
A is even or odd. Therefore, the reflection of
g by
m is
Using the fact that
, the reflections of
F and
f by
m are
Indeed, quite generally, all vectors in the H plane are defined in pairs, the primed and unprimed versions being related by reflection by m. Of course, , while n is invariant under this reflection.
Within the
H plane, reflection by
m is equivalent to reflection in
n, since
n is the “hyperplane” in
H normal to
m. Outside that plane, however, the two are different. Reflections in
n, important for the twist transformation, are written
where we have used the fact that
H anticommutes with vectors lying in it, as well as with bivectors perpendicular to it, and that
. One sees that the sign for reflection in a vector is opposite the sign for reflection by a vector (i.e., in its normal hyperplane).
Let us summarize the elements we have defined and their relationships, referring to
Figure 3 for their illustration. We have vectors
f,
g,
h,
m,
n,
a, and
and bivectors
F,
M, and
H, as well as their primed counterparts reflected by
m. With the exception of
these can be seen in the figure, which shows the 3D subspace of
I. They satisfy
In the definition of n, the sign was chosen so that g lies between m and n, and by inspecting the figure one readily sees the consequence that and are not obtuse for any choice of a between g and m. Vectors a and will now be used to define the rotation planes of the transformations.
4.2. Definitions of Transformations
Definition 1. The discrete curvature transformation (briefly, the discrete curve) is a pair of rotations within, rotating unprimed and primed multivectors out of, in theandplanes respectively, by the transformation angle α. The rotations are implemented by the rotor C and its reflection,where the tilde represents reversion,. The transformation angleis the angle for which.
Definition 2. The twist transformation (briefly, the twist) is a pair of rotations within, rotating unprimed and primed multivectors around the axes a and, respectively, by the transformation angle α. The rotations are implemented by the rotors T and, The transformation angleis the angle for which.
Remark 1. is the reflection of C by m, butis the reflection of T in n. A critical feature of the twist is that both T andhave the same angle, including sign, so their rotations have the same handedness; they are therefore related by reflection in a vector, not in a plane. Algebraically, the difference between the C and T rotors is manifest in the fact that m and n anticommute with(in the C exponent) but commute with I (in the T exponent).
4.3. Equivalence of Transformation Angles
It is well known (e.g., [
1]) that, for any
a between
g and
m, and for some angle
, the discrete curve brings
F and
into coincidence. This is how, for example, gaps between edge-sharing polyhedra in
can be closed to form a polytope in
. Moreover, Fang et al. [
3] have shown in a specific case that, for a certain vector
a and some angle
, the twist transformation also brings
F and
together. Our first result is that not only does the twist work for any vector
a between
g and
m, but the angle for the twist is the same as for the discrete curve. We demonstrate this by using the transformations defined above to derive the same formula for the two transformation angles.
Theorem 1. For arbitrary a in the H plane between vectors g and m, the twist and discrete curvature transformations both bring F andinto coincidence by rotation through the same angle, that is,.
Proof. Under the transformations, reflections by
m and in
n lose the equivalence seen in Equation (
6e). As
F and
are rotated by the discrete curve, they remain reflections of each other by
m; as they are rotated by the twist, they remain reflections of each other in
n, i.e.,
Therefore, rotating
F and
into coincidence implies
and
, or
where
represents the
k-grade part of the expression. These can be expanded by splitting
F into parts that, respectively, commute and anticommute with
a:
For
C, we have used the fact that all bivectors in 3D commute with
, so since
commutes with
a it also commutes with
; in like manner
anticommutes with
. For
T, a similar argument applies to
and
. Next, to solve Equation (
10) explicitly for the angles, we expand
and
as
Using Equations (
11) and (
12), we can write Equation (
10) as,
The
term in Equation (
13) vanished because
, so
, and likewise for the
term in Equation (
14). The
h is factored out of Equation (
14) (next to last step) with the following justification: it anticommutes with both
F and
a, so it anticommutes with
; since it also anticommutes with
m, it therefore commutes with
; hence,
, allowing the mentioned factoring.
We see in Equations (
13) and (
14) that
and
satisfy the same equation. Without loss of generality, we can choose the angles to lie between
and
, and we conclude
. Solving for the angle we find
where the denominator was simplified using the fact that
is orthogonal to both
a and
m. Looking at
Figure 3 we can write this in terms of the angles,
Since we defined a to lie between g and m, , both acute, so exists. ☐
Remark 2. andhave the same sign, so. This result permits two solutions for α, differing by a sign. For the discrete curve, these correspond to curving “up” towardor “down” toward; for the twist, they correspond to right- or left-handed rotation about axis a. Since for each sign the twist has a solution matching the discrete curvature solution, we are justified in saying their angles are the same.
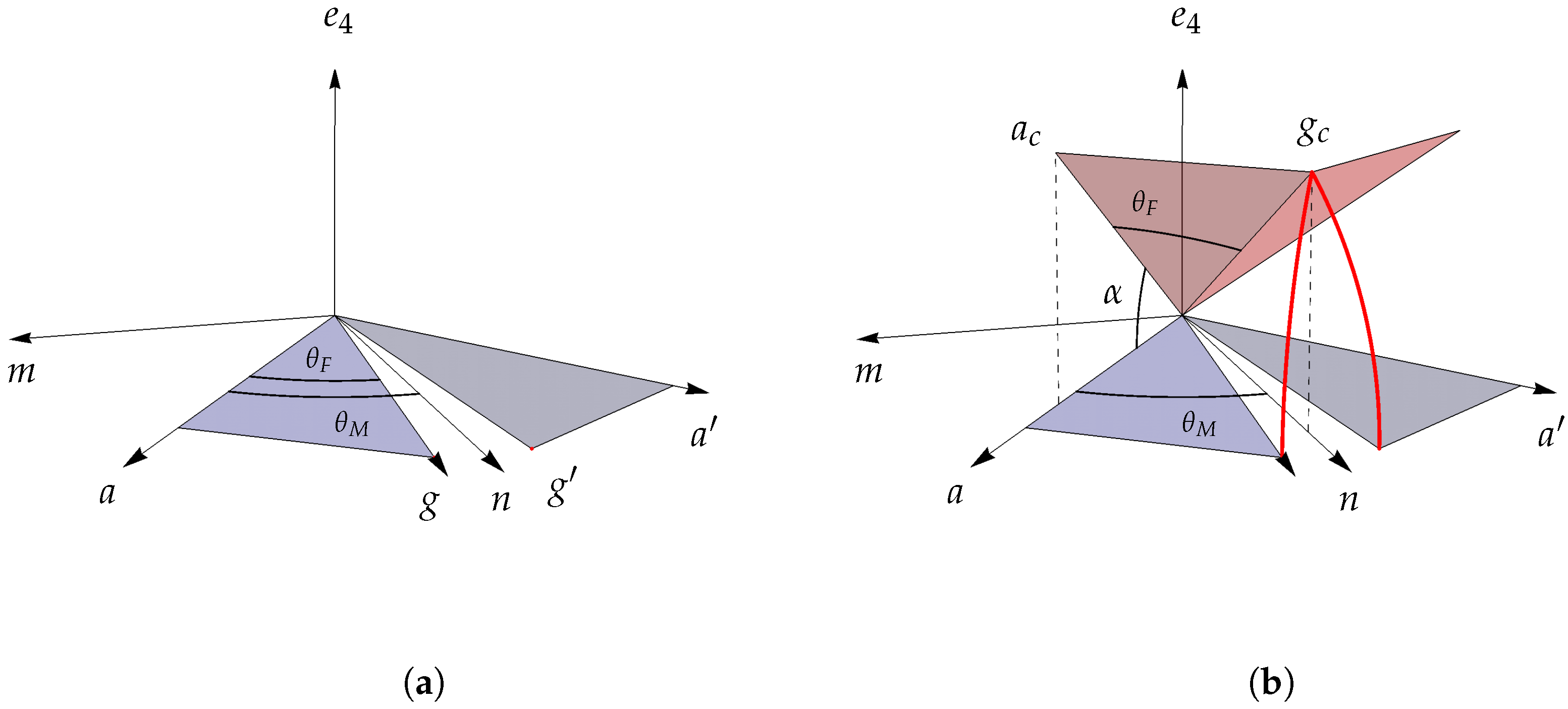
Remark 3. We note incidentally that if the transformation vector a were not in the H plane, Equation (14) could still be satisfied for a twist, theterm leading to a quadratic in. However, no discrete curve could then satisfy Equation (13), since theterm, if it does not vanish, is linearly independent of the others. The geometry of these constructions can be seen in
Figure 4,
Figure 5 and
Figure 6. We first consider the discrete curve, shown in
Figure 4. Since
h is left invariant, we ignore it for now and picture the 3-space of
. The triangle containing
a is rotated in the
plane, while that containing
is rotated in the
plane. Vectors
g and
are rotated along arcs until they meet at
in the
plane. At that point
, and
projects down to
, closing the circular arc. At the same time, the unchanged
is also perpendicular to
m, so
. This is what is expressed algebraically in Equation (
10a), which permits the solution for
.
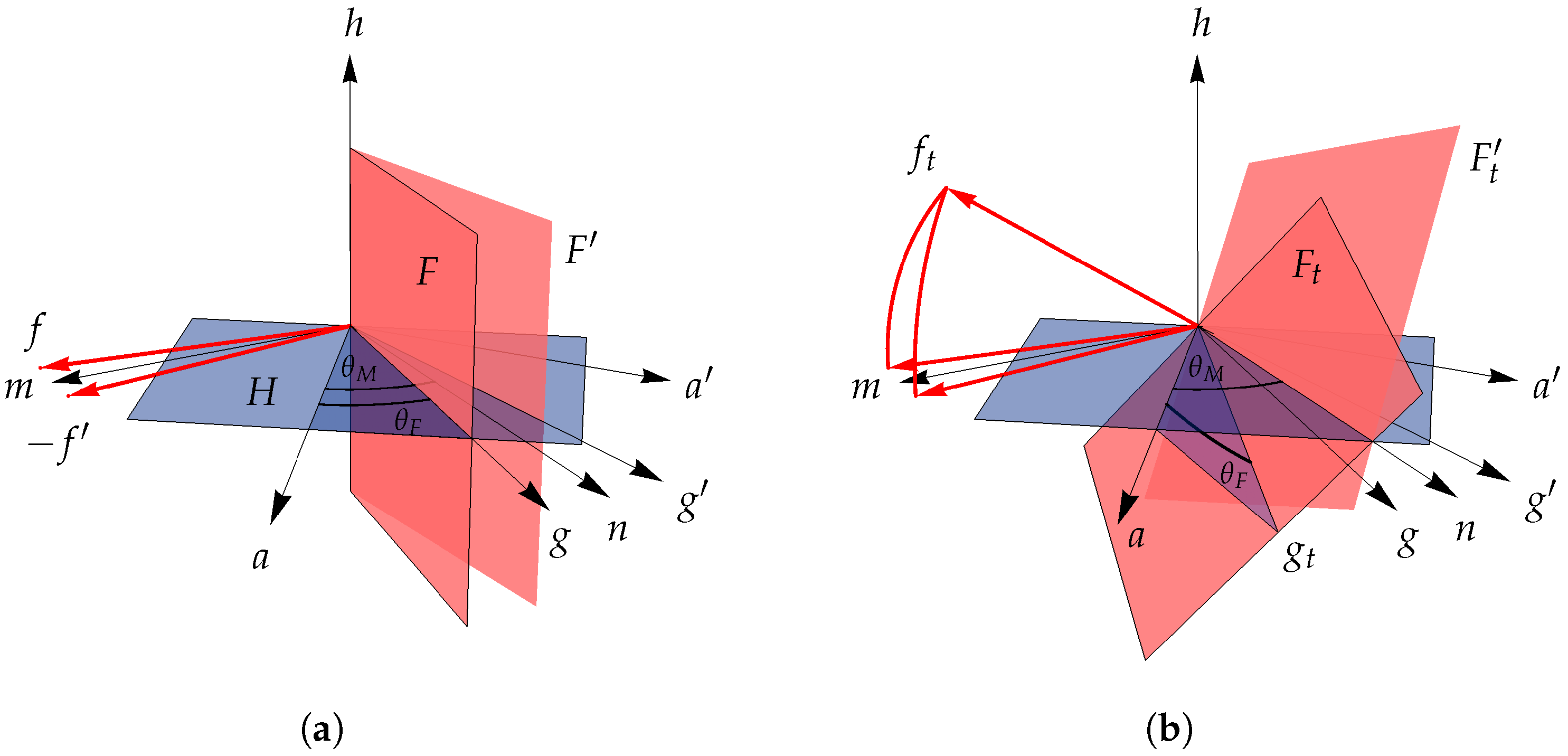
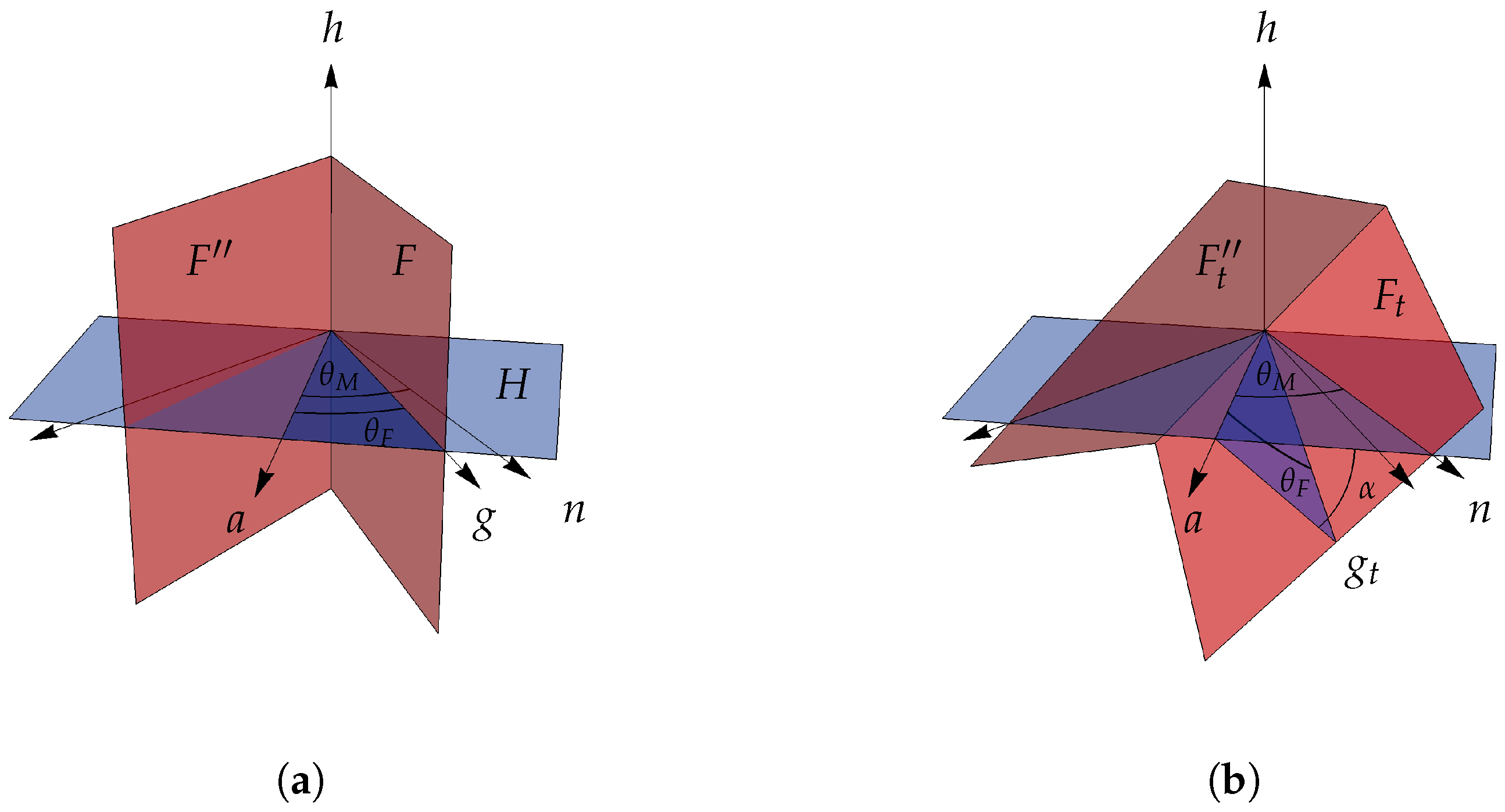
We next consider the twist, as shown in
Figure 5.
F and
are rotated around
a and
, respectively, until they meet in
, which contains
n. This is expressed algebraically by Equation (
10b), which permits the solution for
. The similarity of this to the discrete curve is most easily seen by looking at the normal vectors
f and
, which follow arcs under the
T transformation congruent to those followed by
g and
under the
C transformation (
Figure 4). This illustrates why the transformation angle
is the same in both cases.
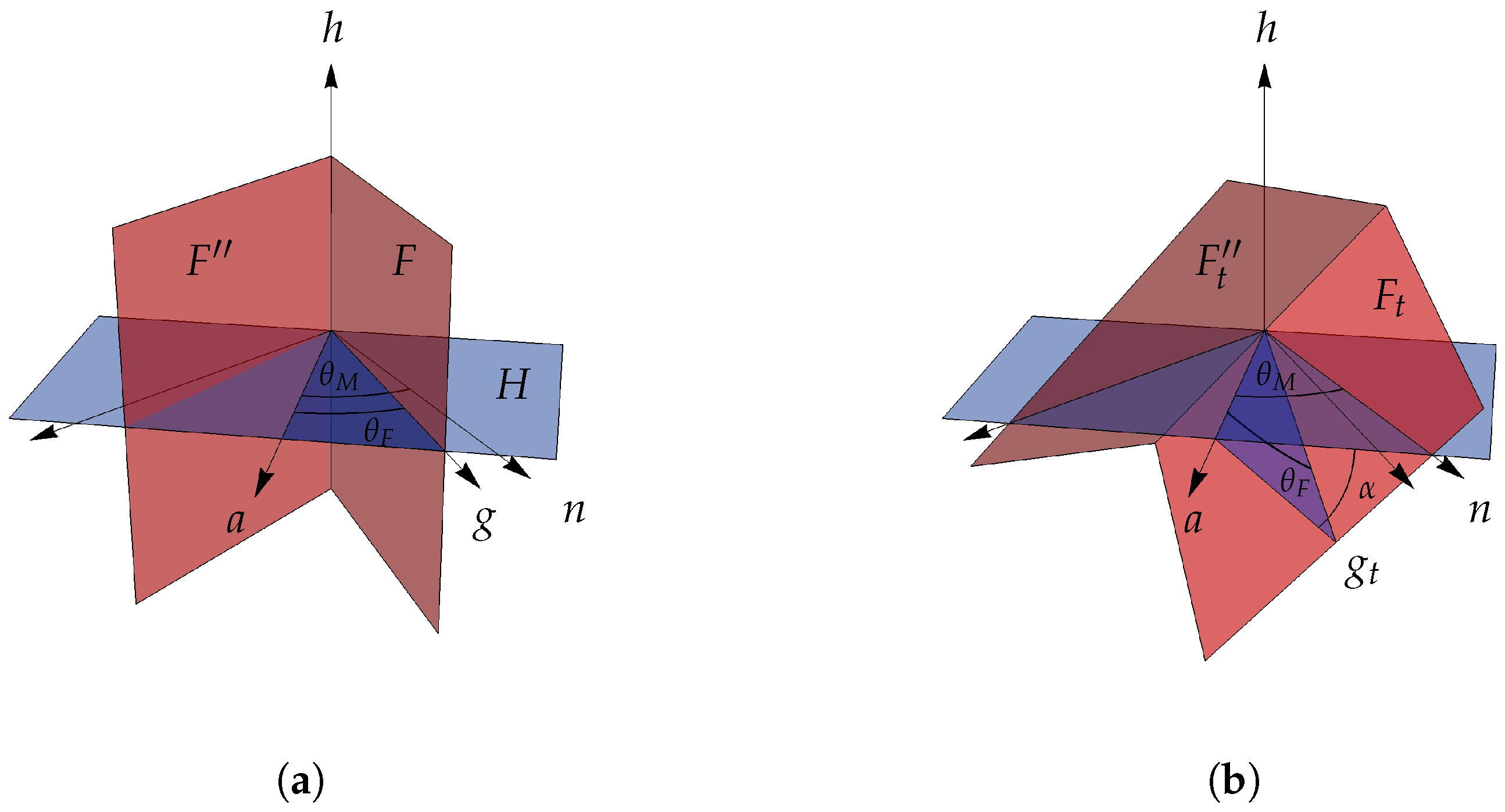
Figure 6 is a second illustration of the twist, where we leave out
and show instead a new bivector
, which is the reflection of
F in the
plane. Whereas
F and
represent adjacent face planes of neighbouring polyhedra brought together by being twisted around different axes,
F and
represent two face planes of a single polyhedron, rotated together around a single axis. This figure shows most clearly how the polyhedron’s actual dihedral angle
is effectively enlarged in the
H plane to match the target dihedral angle
.
4.4. Equivalence of Joint Angles
Having established the equivalence of the transformation angles, we now turn to the joint angles. The two face planes
F and
live initially in the same
, with unit trivector
. The sign on the primed vectors is due to them being mirror reflections of the unprimed ones across
M (one can see in
Figure 3 that
has the opposite handedness of
). The discrete curve and the twist are each constructed so as to bring the bivectors
and
into coincidence, but they do not in general align each individual vector with its primed counterpart. This misalignment is what results in the joint angles between polyhedra where the face planes meet.
Under the discrete curvature transformation, the two rotations C and have different actions on the original 3D space, so that is not the same as . More specifically, the vectors within F and do converge (g and are brought together in the final state, and is left invariant), but the normal vector does not become , because along the plane the 3-spaces of and meet at a bent joint.
Definition 3. For the discrete curvature transformation, when, the joint angleis the angle inbetween trivectorsand. This is equivalent to the angle betweenand.
Remark 4. If F andare faces of two distinct polyhedra brought together by the discrete curve to form two cells of anpolytope, then the joint angle thus defined is their exterior dihedral angle, supplementary to the ordinary interior dihedral angle.
Under the twist, the situation is reversed. T and leave I and invariant, so implies that . In this case, it is and that are twisted relative to and within the final plane, and their relative angle is the joint angle for the twist transformation.
Definition 4. For the twist transformation, the joint angleis the angle in theplane betweenand.
Remark 5. In an edge-sharing cluster of n polyhedra, the twist splits the shared edge into n distinct edges, leaving a void in the shape of an n-sided pyramidal cone (see row 2 of Table 1). For a vertex-sharing cluster, the nearest neighbour edges emanating from the shared vertex form a similar pyramidal cone. The joint angle is the angle between adjacent edges, i.e., the apex angle of the triangular sides of that pyramid. In either case (discrete curvature or twist), the joint angle can be thought of as the angular relationship between the orthonormal triads f, g, h and , , h after they have been transformed. We now come to our second result, which is that both transformations yield the same joint angles.
Theorem 2. The joint angles in the cases of discrete curvature and twist are the same, i.e.,.
Proof. The proof is by direct computation of the half angles and (a briefer derivation than for the full angles).
Vector
m bisects the angle between
and
, while
n bisects the angle between
and
, for
For the twist
T, it is straightforward to calculate
using our explicit expression for
T, but a more direct route to the result is found by using the fact that
, which can be seen by looking at
Figure 5. This is justified more rigorously by noting that
n lies in
(see Equation (
10b)), so
, while also
. Hence,
is perpendicular to any bivector containing
. In particular, it is perpendicular to
. However,
also contains the invariant axis
, and so is proportional to
. Therefore,
, or
using
and
. This can then be solved for
For
, the computation is analogous. With
, and also
(Equation (
10a), with
lying in
), we find
is perpendicular to any bivector containing
. In particular, it is perpendicular to
, which contains the invariant vector
(
is orthogonal to both
a and
, which together form the plane of the rotation; it is the vector in
H that remains invariant while
H is rotated to
). Thus,
, or
using
and
. Since
, this can be solved for
The preceding proofs apply to any two bivectors
F and
that share a line of intersection. If these are the planes of adjacent faces of two edge-sharing or vertex-sharing polyhedra, we apply the respective rotations to each polyhedron as a whole. For a cluster of congruent polyhedra symmetrically arranged about a shared edge or vertex, each pair of adjacent face planes can be merged by simultaneously rotating all the polyhedra in the cluster, as illustrated for tetrahedral clusters in
Table 1. In
Appendix A, we apply the formula to several such clusters and show the explicit calculation of their transformation and joint angles.
5. Discussion and Outlook
In an attempt to fill flat 3D space, clusters of congruent polyhedral are geometrically frustrated—all arrangements with shared edges or vertices leave gaps between some of their neighbouring faces. A well-known isometric method for relieving this frustration and bringing those faces together uses discrete curvature, bending the cluster into the fourth dimension [
1]. An alternative isometry is the twisting method, which involves the twisting of the cluster in 3D and thus does not require a fourth dimension.
In this paper, we have shown not only that twisting works quite generally, but also that the twisted structure entails the same transformation angle (relative to the symmetric, gapped configuration) and the same joint angle as the discretely curved one. We give the general formulae for the transformation and joint angles based on the dihedral angle of the polyhedra and the angle between adjacent polyhedra, thus simplifying the calculations required when applying our method.
The application of the twisting method to clusters of regular tetrahedra is particularly appealing, both because the tetrahedron is the simplest platonic solid, and because of its role in sphere packing, a case of interest for several research fields [
2]. Therefore, we have presented the computations of the actual angles for tetrahedra in edge-sharing and vertex-sharing clusters with 3-, 4-, and 5-fold symmetry.
In this study, we have considered the particular case of clusters that share a single edge or vertex, but one would naturally like to know if our results could be generalized to larger groupings. We do know that, with the discrete curvature method, the local order can propagate beyond the local cluster, and that infinite propagation can be achieved with quasicrystalline order [
1]. We also know that, for the 20 G, a twisted cluster whose 4D analogue is the vertex cap of a 600-cell, the local order can likewise be propagated indefinitely to form a quasicrystal, and that the same quasicrystal can be created by decorating a 3D slice of the Elser-Sloane quasicrystal, which is itself a network of intermeshing 600-cells [
4,
13]. In addition, the current paper has shown that, at least locally, the closing of gaps by the twist method, as well as the isogonism between the twist and the discrete curvature methods, are not coincidences due a particular configuration, but are quite general. This suggests that the success of the twist method at achieving global propagation from the 20 G is no coincidence either, and that a general method may be found to construct quasicrystals based on twisted structures to match those based on discretely curved structures. Perhaps to any corrugated 3-space complex of regular tetrahedra that does not deviate too far from a flat Euclidean 3-space, there corresponds some twisted structure in the flat space whose twist angles match the curvature angles of the corrugated structure. This is an interesting avenue for further research. If true, it would mean any such curved space complex could be represented by a twisted network of simplices in flat space.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

















