
Sinc-Approximations of Fractional Operators: A Computing Approach

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Approximation Method
2.1. Sinc Bases
2.2. Indefinite Integral
2.3. Convolution Integrals
3. Sinc Representation of Fractional Operators
3.1. Fractional Integrals
3.2. Fractional Derivatives
3.3. Fractional Integral Equations
3.4. Fractional Differential Equations
3.5. Collocation of Fractional Integral Equations
3.6. Collocation of Fractional Differential Equations
4. Examples
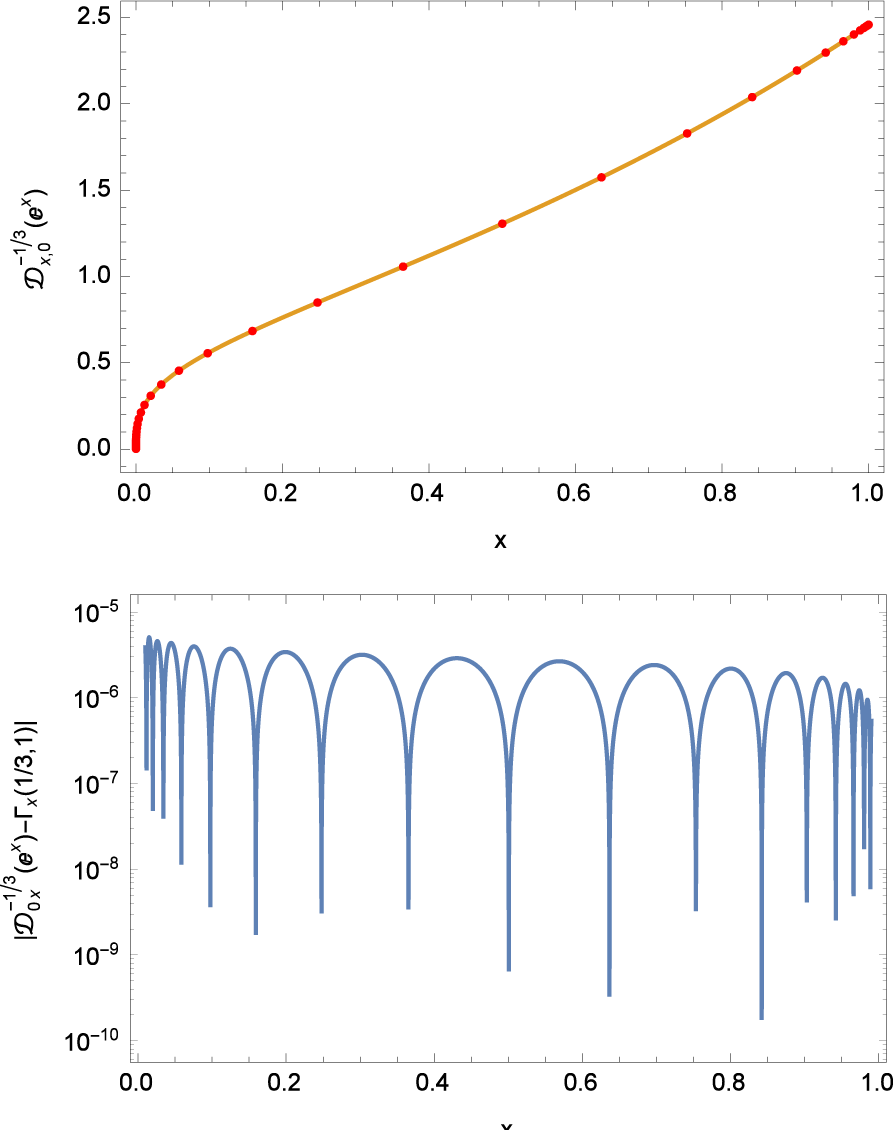
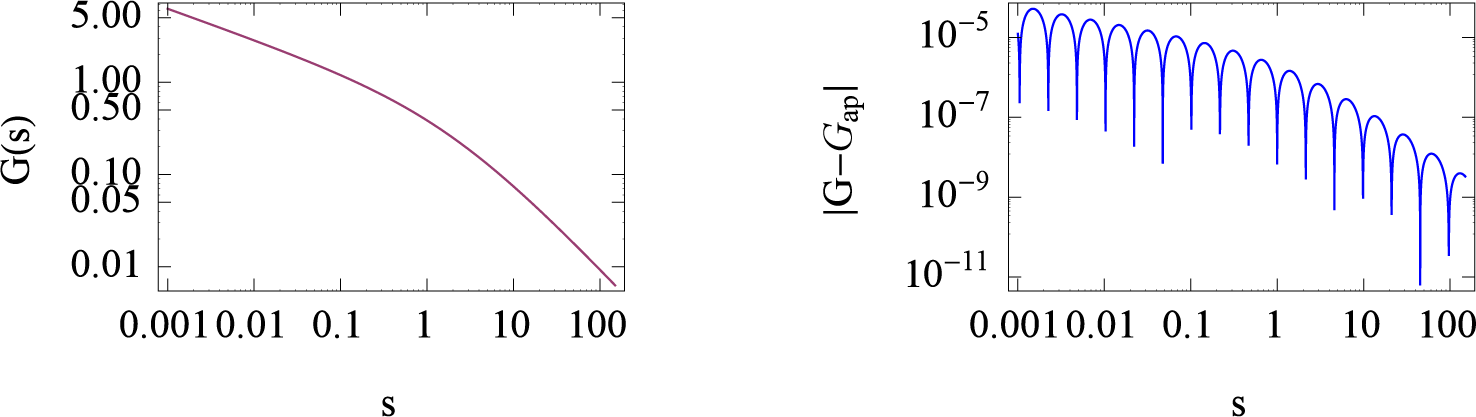
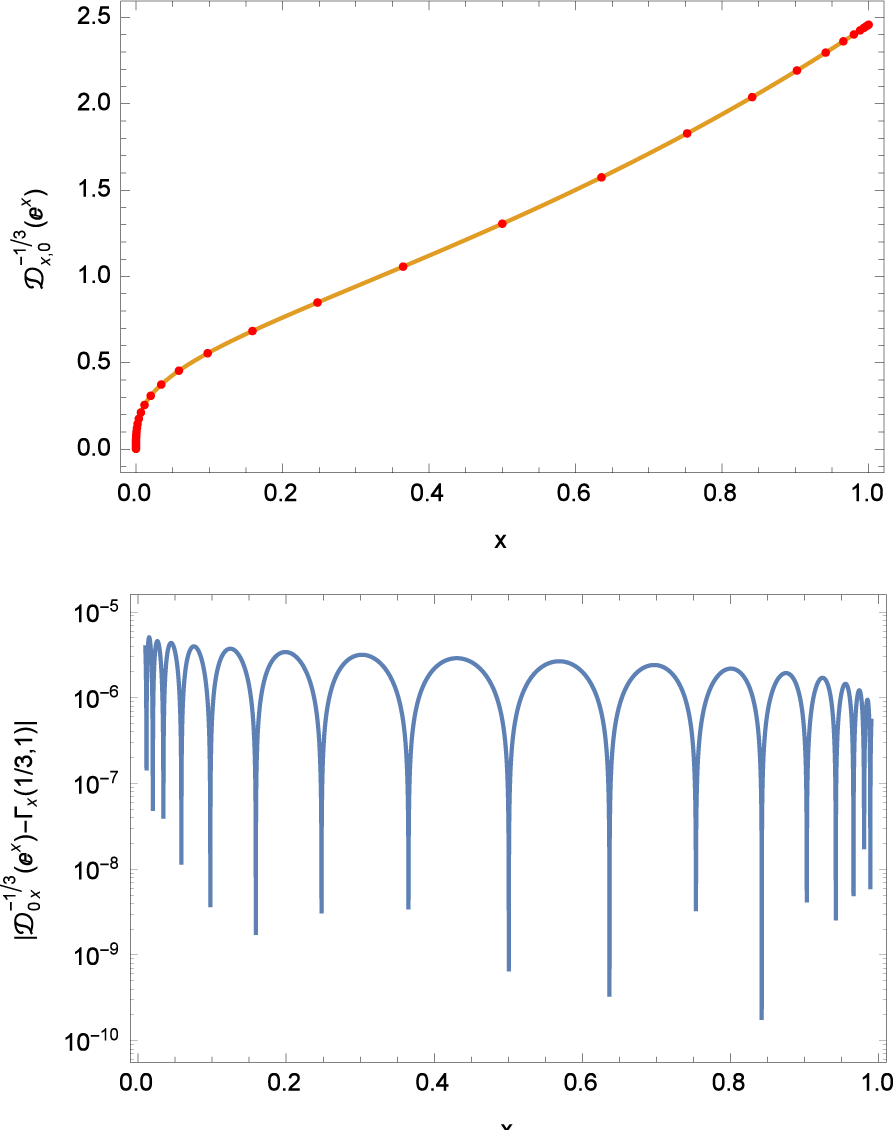
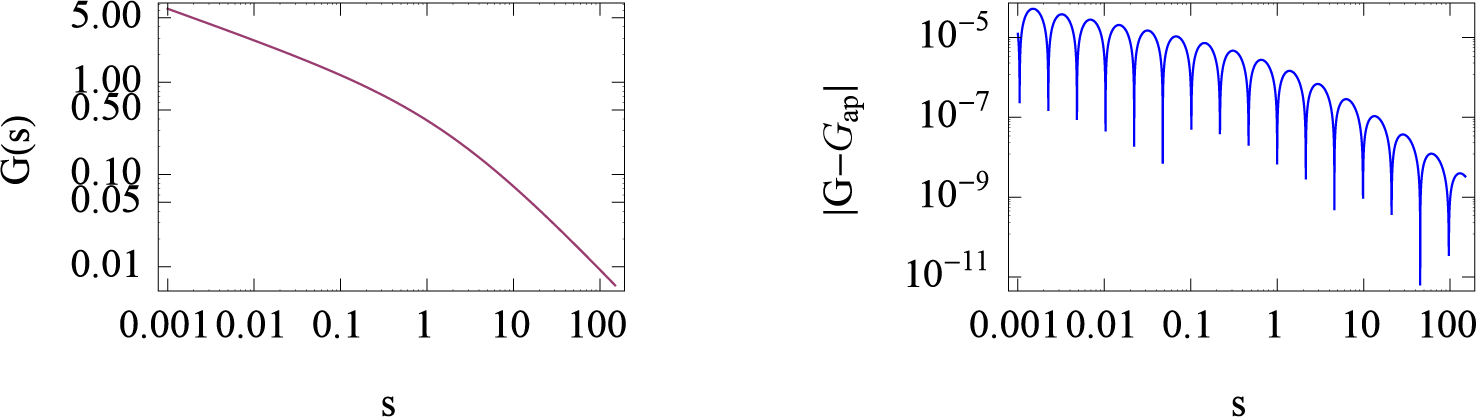
4.1. Generalized Gamma Function
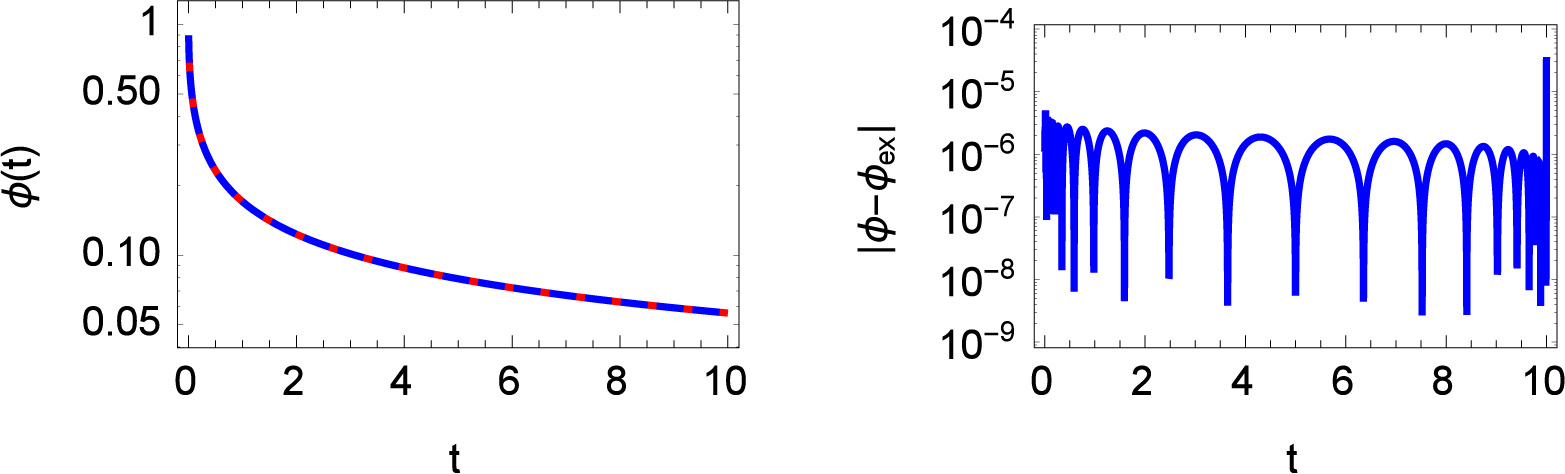
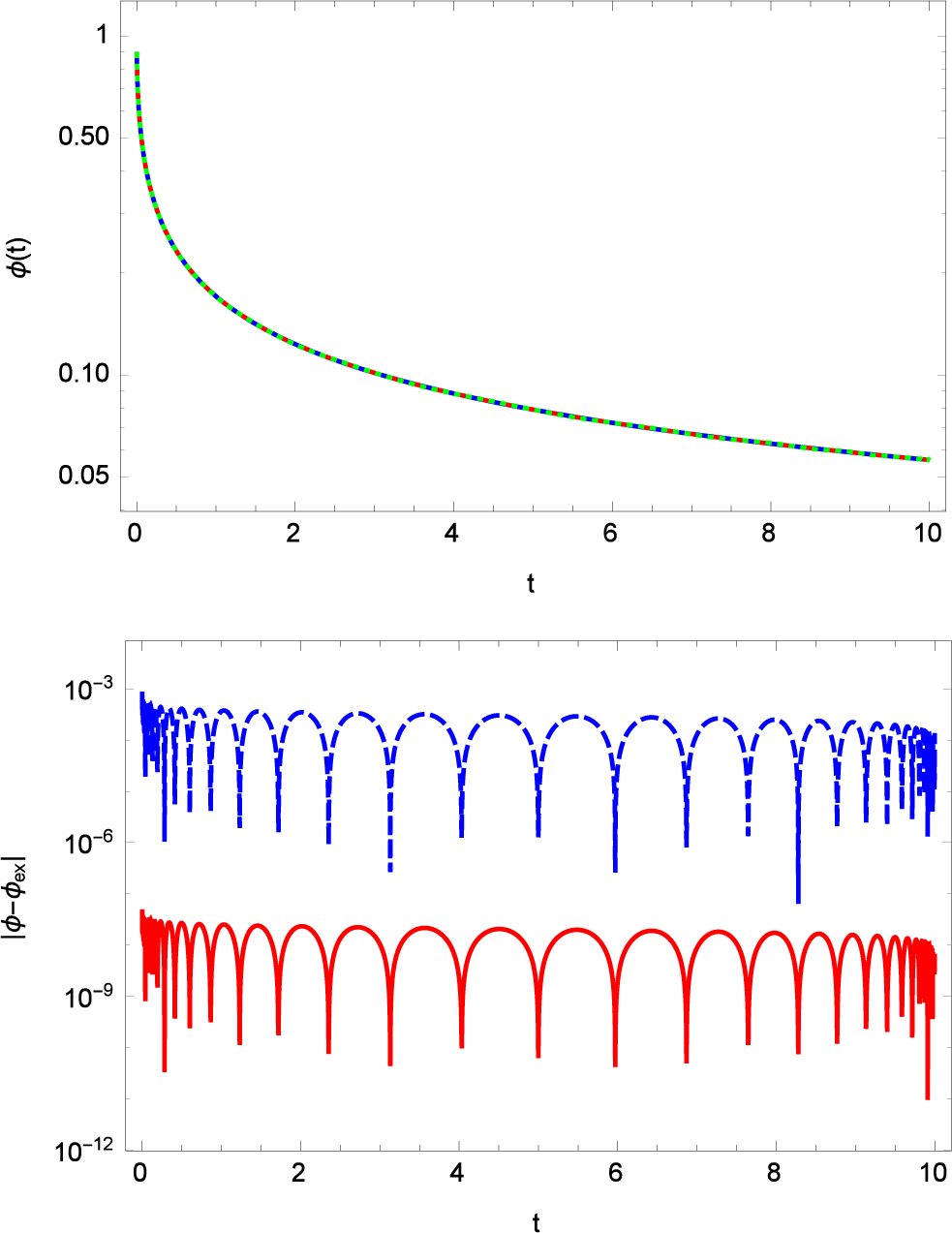
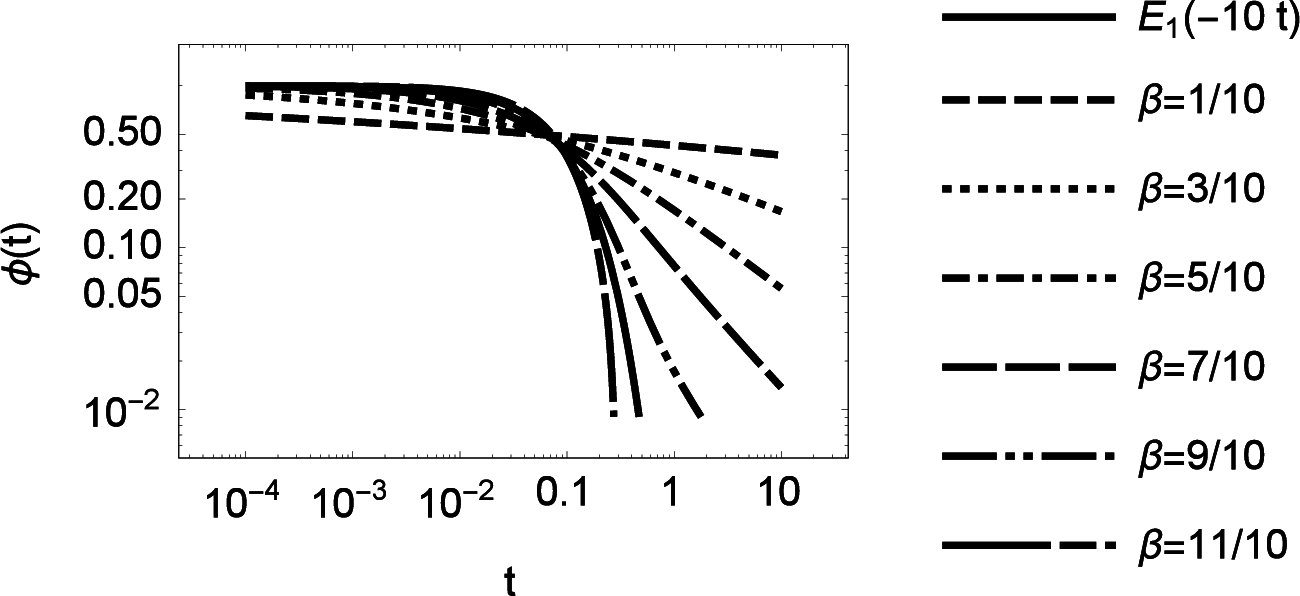
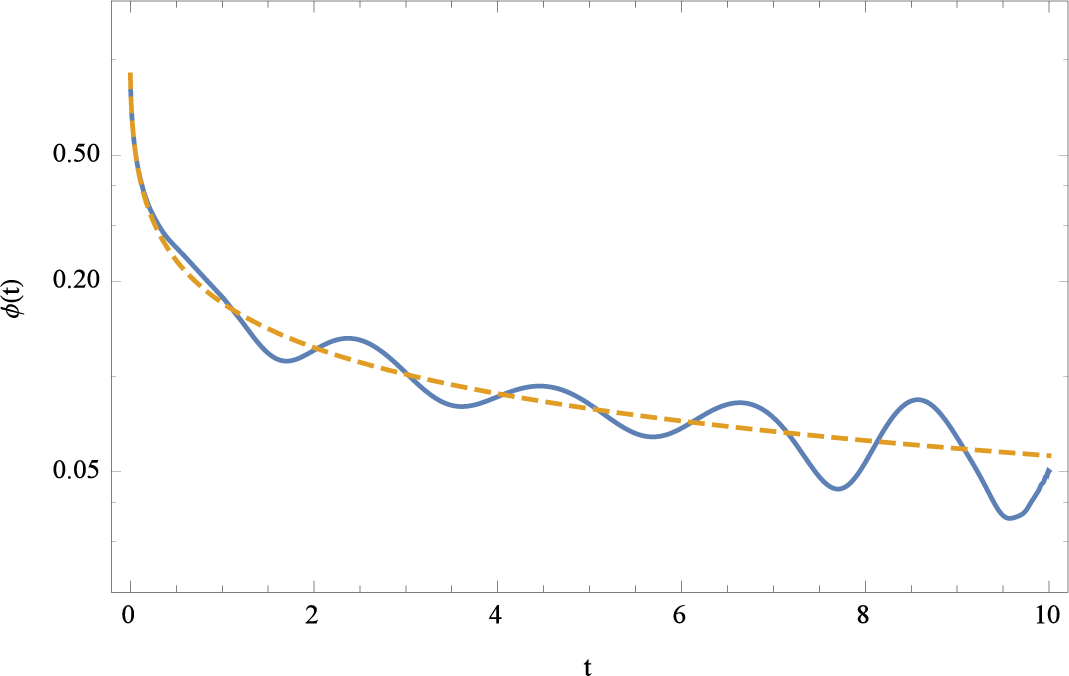
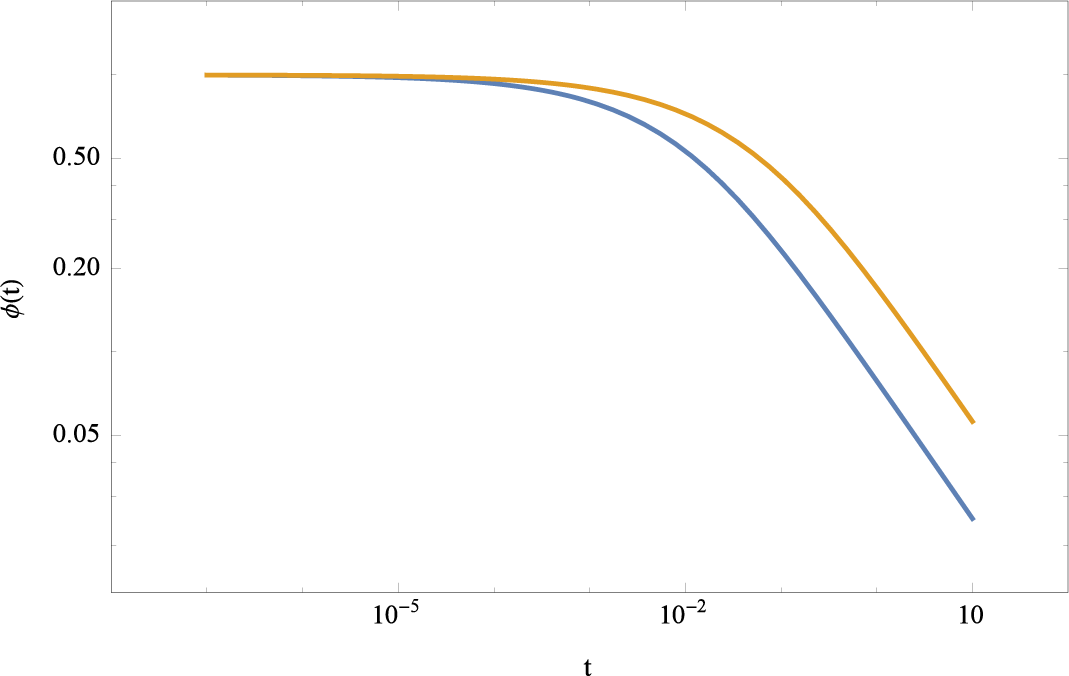
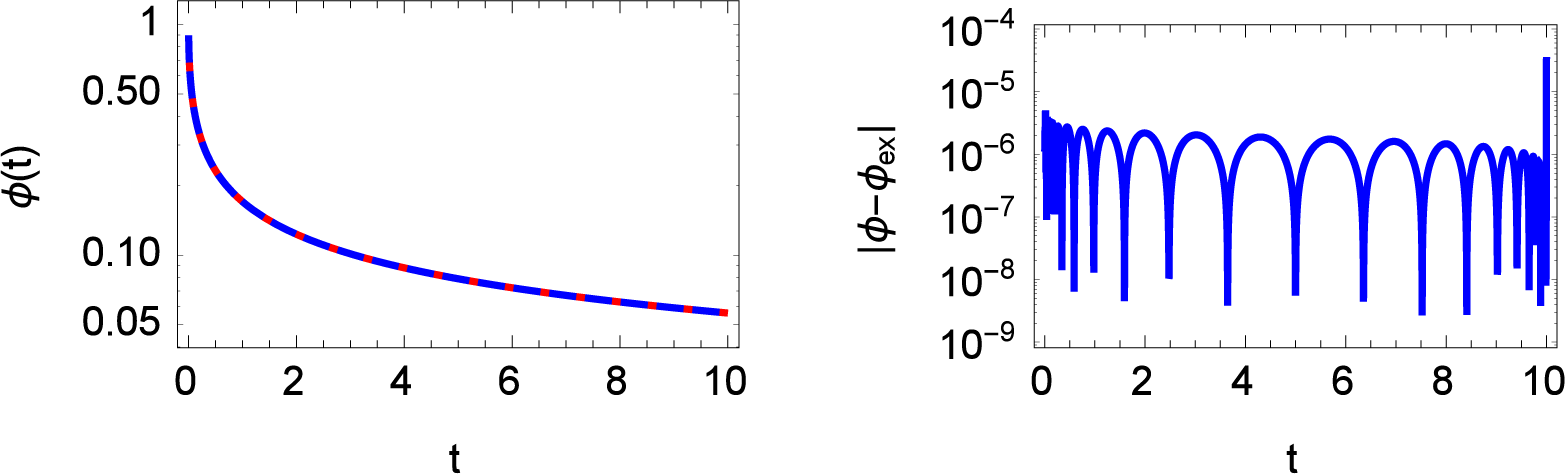
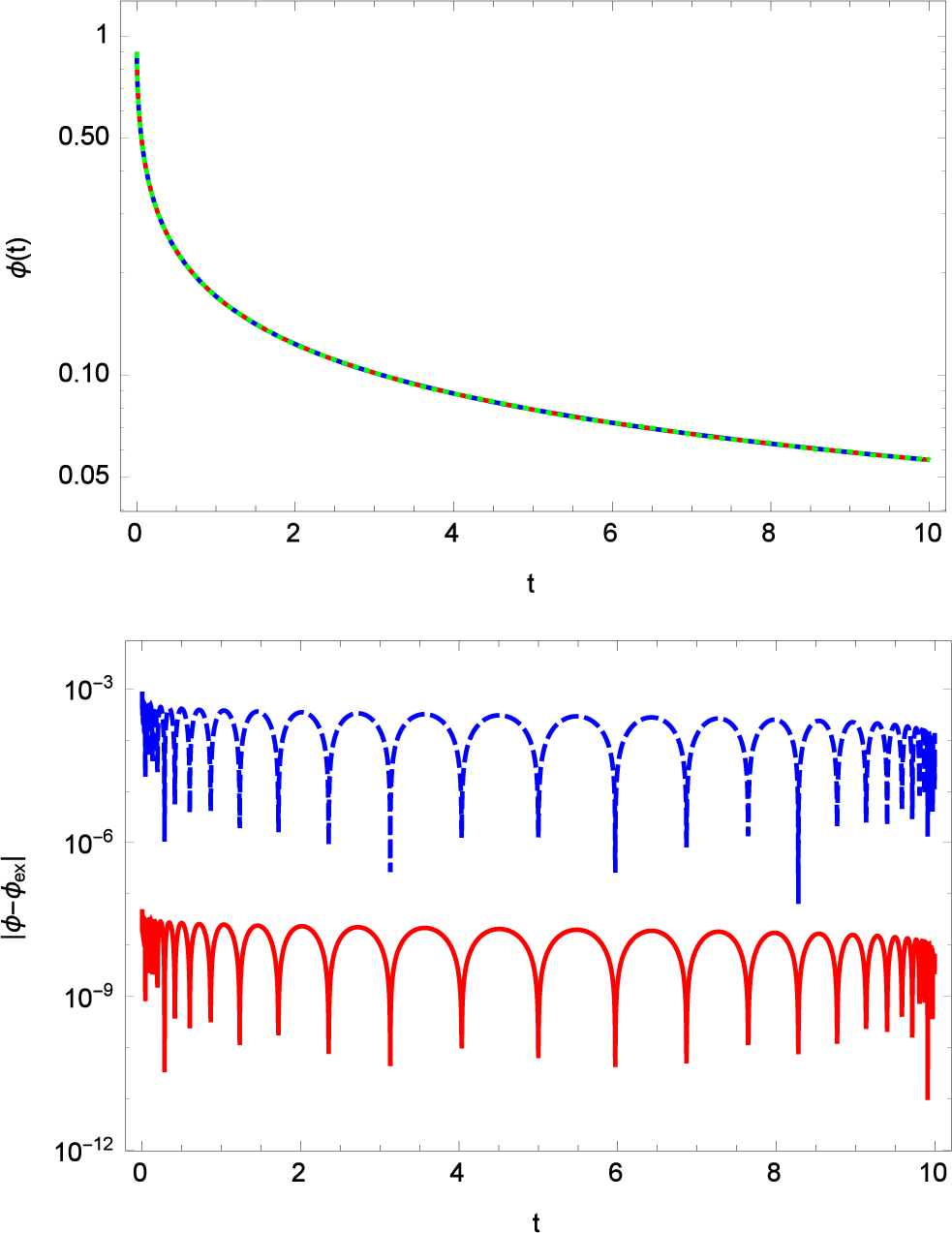
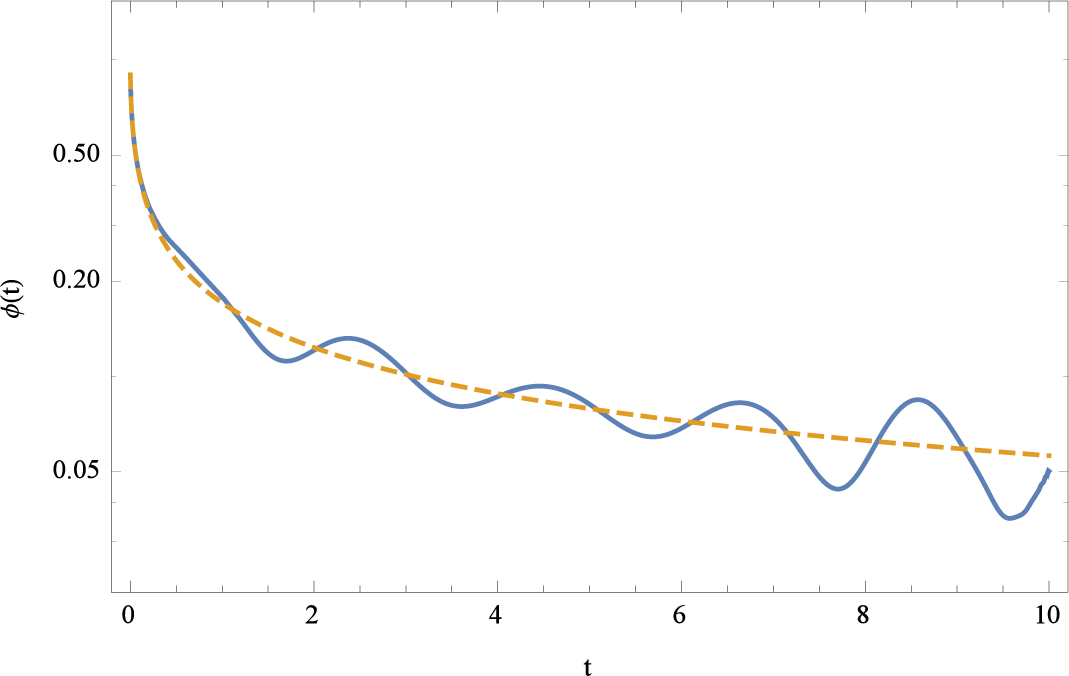
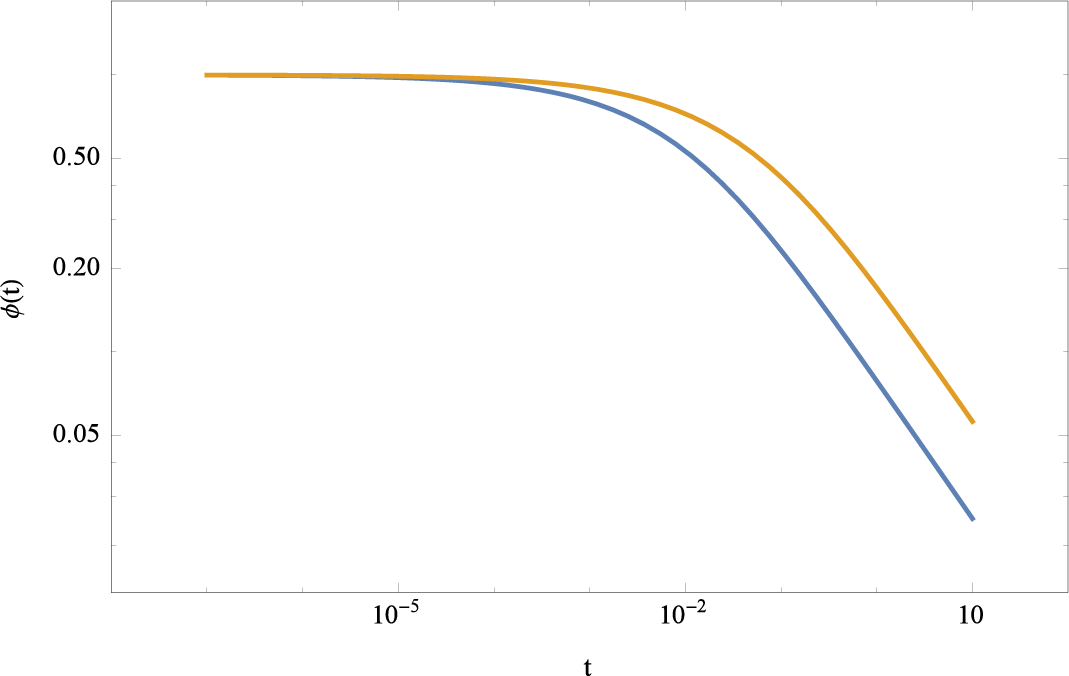
4.2. Extended Fractional Relaxation
4.3. Fractal Filters
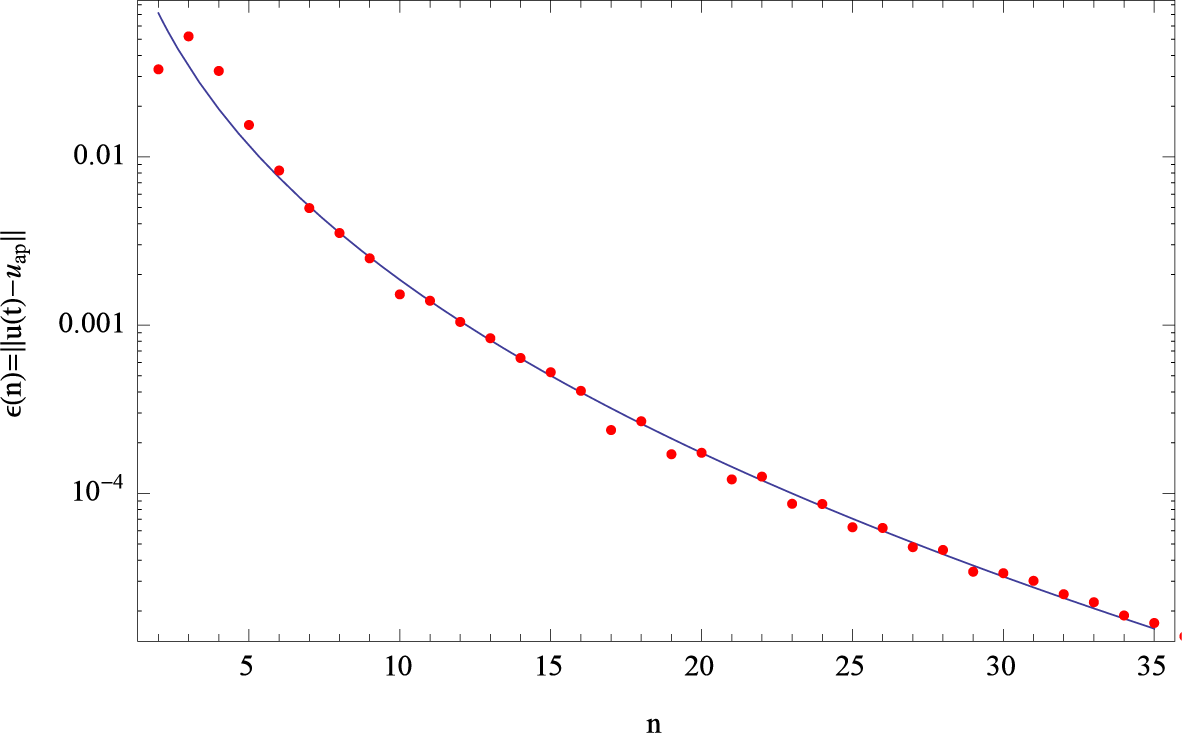
4.4. Inverse Laplace Transform
- Assume that the spectrum; i.e., the matrix X+ and vector s = (s−M, …, sN)T have already been stored for some interval (α, β), corresponding to matrix , make the replacement s → α/(β − α)s, and compute the column vector v = (v−M, …vN)T = (X+)−1 1, where 1 is a vector of M + N + 1 ones;
- Compute
- All operations of this evaluation take a trivial amount of time, except for the last matrix vector equation. However, the size of these matrices is nearly always much smaller than the size of the DFT matrices for solving similar problems via FFT.
4.5. Levinson’s Integral Equation
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Oldham, K.B.; Spanier, J. The Fractional Calculus; Academic Press: New York, NY, USA, 1974. [Google Scholar]
- Abel, N.H. Auflösung einer mechanischen Aufgabe. J. Reine Angew. Math. 1826, 1, 153–157. [Google Scholar]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; Elsevier: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Freed, A.D.; Diethelm, D.K. Fractional calculus in biomechanics: A 3D viscoelastic model using regularized fractional derivative kernels with application to the human calcaneal fat pad. Biomech. Mod. Mech. 2006, 5, 203–215. [Google Scholar]
- Schmidt, A.; Gaul, L. FE Implementation of Viscoelastic Constitutive Stress-Strain Relations Involving Fractional Time Derivatives. Const. Model. Rubber 2001, 2, 79–92. [Google Scholar]
- Lubich, Ch. Convolution Quadrature and Discretized Operational Calculus I. Numer. Math. 1988, 52, 129–145. [Google Scholar]
- Lubich, Ch. Convolution Quadrature and Discretized Operational Calculus II. Numer. Math. 1988, 52, 413–425. [Google Scholar]
- Agrawal, O.P.; Kumar, P. Comparison of five numerical schemes for fractional differential equations. In Advances in Fractional Calculus: Theoretical Developments and Applications in Physics and Engineering; Sabatier, J., Agrawal, O.P., Machado, J.A.T., Eds.; Springer: Dordrecht, The Netherlands, 2007; pp. 43–60. [Google Scholar]
- Lubich, Ch. Runge-Kutta theory for Volterra and Abel integral equations of the second kind. Math. Comput. 1983, 41, 87–102. [Google Scholar]
- Yuan, L.; Agrawal, O.P. A Numerical Scheme for Dynamic Systems Containing Fractional Derivatives. J. Vib. Acoust. 2002, 124, 321–324. [Google Scholar]
- Momania, S.; Odibatb, Z. Homotopy perturbation method for non-linear partial differential equations of fractional order. Phys. Lett. A 2007, 365, 345–350. [Google Scholar]
- Diethelm, K.; Ford, N.J.; Freed, A.D.; Luchko, Y. Algorithms for the fractional calculus: A selection of numerical methods. Comput. Methods Appl. Mech. Eng. 2005, 194, 743–773. [Google Scholar]
- Diethelm, K. The Analysis of Fractional Differential Equations: An Application-Oriented Exposition Using Differential Operators of Caputo Type; Springer: Heidelberg, Germany, 2010. [Google Scholar]
- Sabatier, J.; Agrawal, O.P.; Machado, J.A.T. Advances in Fractional Calculus: Theoretical Developments and Applications in Physics and Engineering; Springer: Dordrecht, The Netherlands, 2007. [Google Scholar]
- McNamee, J.; Stenger, F.; Whitney, E.L. Whittaker’s Cardinal Function in Retrospect. Math. Comput. 1971, 23, 141–154. [Google Scholar]
- Stenger, F. Collocating convolutions. Math. Comput. 1995, 64, 211–235. [Google Scholar]
- Adomian, G. Solving Frontier Problems of Physics: The Decomposition Method; Kluwer Academic Publisher: Dordrecht, The Netherlands, 1994. [Google Scholar]
- Edwards, J.T.; Roberts, J.A.; Ford, N.J. A Comparison of Adomiannal Differential Equations: An Application-Oriented Exposition Using Differential Operators of Caputo Type; Numerical Analysis Report; Manchester Centre for Computational Mathematics, University of Manchester: Manchester, UK, 1997; Volume 309, pp. 1–18. [Google Scholar]
- Répaci, A. Nonlinear dynamical systems: On the accuracy of Adomian’s decomposition method. Appl. Math. Lett. 1990, 3, 35–39. [Google Scholar]
- He, J.H. Approximate solution of non linear differential equations with convolution product nonlinearities. Comput. Meth. Appl. Mech. Eng. 1998, 167, 69–73. [Google Scholar]
- He, J.H. Variational iteration method—Some recent results and new interpretations. J. Comput. Appl. Math. 2007, 207, 3–17. [Google Scholar]
- Liao, S. Beyond Perturbation: Introduction to the Homotopy Analysis Method; Chapman & Hall/CRC Press: Boca Raton, FL, USA, 2004. [Google Scholar]
- Odibata, Z.; Momanib, S.; Erturkc, V.S. Generalized differential transform method: Application to differential equations of fractional order. Appl. Math. Comput. 2008, 197, 467–477. [Google Scholar]
- Tataria, M.; Dehghan, M. On the convergence of He’s variational iteration method. J. Comput. Appl. Math. 2007, 207, 121–128. [Google Scholar]
- Liang, S.; Jeffreya, D.J. Comparison of homotopy analysis method and homotopy perturbation method through an evolution equation. Commun. Nonlinear Sci. Numer. Simul. 2009, 14, 4057–4064. [Google Scholar]
- Stenger, F. Summary of Sinc numerical methods. J. Comput. Appl. Math. 2000, 121, 379–420. [Google Scholar]
- Gavrilyuk, I.P.; Hackbusch, W.; Khoromskij, B.N. Data-Sparse Approximation to a Class of Operator-Valued Functions. Math. Comput. 2005, 74, 681–708. [Google Scholar]
- Khoromskij, B.N. Fast and Accurate Tensor Approximation of a Multivariate Convolution with Linear Scaling in Dimension. J. Comput. Appl. Math. 2010, 234, 3122–3139. [Google Scholar]
- Stenger, F. Handbook of Sinc Numerical Methods; CRC Press: Boca Raton, FL, USA, 2011. [Google Scholar]
- Kowalski, M.A.; Sikorski, K.A.; Stenger, F. Selected Topics in Approximation and Computation; Oxford University Press: New York, NY, USA, 1995. [Google Scholar]
- Stenger, F. Numerical Methods Based on Sinc and Analytic Functions; Springer: New York, NY, USA, 1993. [Google Scholar]
- Burchard, H.G.; Höllig, K. N-Width and Entropy of Hp-Classes in Lq(−1, 1). SIAM J. Math. Anal. 1985, 16, 405–421. [Google Scholar]
- Stenger, F.; El-Sharkawy, H.; Baumann, G. The Lebesgue Constant for Sinc Approximations. In New Perspectives on Approximation and Sampling Theory; Zayed, A.I., Schmeisser, G., Eds.; Springer International Publishing: New York, NY, USA, 2014; pp. 319–335. [Google Scholar]
- Capuro, M.; Mainardi, F. A new dissipation model based on memory mechanism. Pure Appl. Geophys. 1971, 91, 134–147. [Google Scholar]
- Podlubny, I. Fractional Differential Equations: An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and Some of Their Applications; Academic Press: San Diego, CA, USA, 1999. [Google Scholar]
- Baumann, G.; Stenger, F. Fractional Calculus and Sinc Methods. Fract. Calc. Appl. Anal. 2011, 14, 1–55. [Google Scholar]
- Han, L.; Xu, J. Proof of Stenger’s conjecture on matrix of Sinc methods. J. Comput. Appl. Math. 2014, 255, 805–811. [Google Scholar]
- Miller, K.S.; Ross, B. An Introduction to the Fractional Calculus and Fractional Differential Equations; Wiley: New York, NY, USA, 1993. [Google Scholar]
- Daftardar-Gejji, V.; Jafari, H. Analysis of a system of nonautonomous fractional differential equations involving Caputo derivatives. J. Math. Anal. Appl. 2007, 328, 1026–1033. [Google Scholar]
- Levinson, N. A nonlinear equation arising in the theory of superfluidity. J. Math. Anal. Appl. 1960, 1, 1–11. [Google Scholar]
- Lin, C.C. Hydrodynamics of Liquid Helium II. Phys. Rev. Lett. 1959, 2, 245–246. [Google Scholar]
- Dietheln, K.; Ford, N.J. Numerical solution of the Bagley Torvik equation. BIT Numer. Math. 2002, 42, 490–507. [Google Scholar]
- Diethelm, K. Efficient solution of multi-term fractional differential equations using P(EC)mE methods. Computing 2003, 71, 305–319. [Google Scholar]
- Glöckle, W.G.; Nonnenmacher, T.F. A fractional calculus approach to self-similar protein dynamics. Biophys. J. 1995, 68, 46–53. [Google Scholar]
- Austin, R.H.; Beeson, K.W.; Eisenstein, L.; Frauenfelder, H.; Gunsalus, I.C. Dynamics of ligand binding to myoglobin. Biochemistry 1975, 14, 5355–5373. [Google Scholar]
- Nonnenmacher, T.F.; Nonnenmacher, D.J.F. A Fractal Scaling Law for Protein Gating Kinetics. Phys. Lett. A 1989, 140, 323–326. [Google Scholar]
- Baumann, G. Mathematica for Theoretical Physics; Springer: New York, NY, USA, 2013; Volume I and II. [Google Scholar]
- Roy, S.D. On the Realization of a Constant-Argument Immittance or Fractional Operator. IEEE Trans. Circuit Theory 1967, 14, 264–274. [Google Scholar]
- Wang, Y.; Hartley, T.T.; Lorenzo, C.F.; Adams, J.L.; Carletta, J.E.; Veillette, R.J. Modeling Ultracapacitors as Fractional-Order Systems. In New Trends in Nanotechnology and Fractional Calculus Applications; Baleanu, D., Güvenç, Z.B., Machado, J.A.T., Eds.; Springer: Dordrecht, The Netherlands, 2010; pp. 257–262. [Google Scholar]
- Belhachemi, F.; Rael, S.; Davat, B. A physical based model of power electric doublelayer supercapacitors, Proceedings of the 2000 IEEE Industry Applications Conference, Rome, Italy, 8–12 October 2000; 5, pp. 3069–3076.
- Mellor, P.H.; Schofield, N.; Howe, D. Flywheel and supercapacitor peak power buffer technologies, Proceedings of the IEEE Seminar on Electric, Hybrid and Fuel Cell Vehicles, Durham, UK; 2000; 8, pp. 1–5.
- Schupbach, R.M.; Balda, J.C. The Role of ultracapacitors in an energy storage unit for vehicle power management, Proceedings of the 2003 IEEE 58th Vehicular Technology Conference, Orlando, FL, USA, 6–9 October 2003; 5, pp. 3236–3240.




© 2015 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Baumann, G.; Stenger, F. Sinc-Approximations of Fractional Operators: A Computing Approach. Mathematics 2015, 3, 444-480. https://doi.org/10.3390/math3020444
Baumann G, Stenger F. Sinc-Approximations of Fractional Operators: A Computing Approach. Mathematics. 2015; 3(2):444-480. https://doi.org/10.3390/math3020444
Chicago/Turabian StyleBaumann, Gerd, and Frank Stenger. 2015. "Sinc-Approximations of Fractional Operators: A Computing Approach" Mathematics 3, no. 2: 444-480. https://doi.org/10.3390/math3020444
APA StyleBaumann, G., & Stenger, F. (2015). Sinc-Approximations of Fractional Operators: A Computing Approach. Mathematics, 3(2), 444-480. https://doi.org/10.3390/math3020444