1. Introduction
The Circular Restricted Three-Body Problem (CRTBP) examines the motion of a negligible mass moving within a system of two massive bodies, referred to as the primaries, which orbit each other around their common center of mass. The third body (test particle) is much smaller in mass than the primaries, so its influence on their motion is negligible. As the CRTBP is a non-integrable dynamical system, analytical solutions for the particle’s orbit are generally not obtainable [
1], requiring the use of numerical methods for deeper analysis. In the context of the planar gravitational restricted three-body problem, there are five equilibrium points. Among these, the equilateral points
and
are stable when the mass ratio
of the primaries is below the critical threshold
In contrast, the other three collinear points
,
and
are typically unstable.
To understand and analyze the dynamical behavior of a test particle in the CRTBP, numerous researchers have extended this classical problem by introducing additional factors. These generalized restricted three-body problems incorporate extra hypotheses that modify the original CRTBP but without changing its basic nature. Such extensions may include the effects of radiation pressure, Poynting–Robertson drag, and the Yarkovsky effect, among others. While the Yarkovsky effect may have a relatively small influence, it is particularly important in celestial mechanics, especially when determining the proper orbits of small celestial bodies, like asteroids. Among all these perturbative forces, radiation pressure stands out as the most significant. The interest in the dynamics of small particles within solar systems containing one or two stars has led to the development of the so-called Photogravitational Restricted Three-Body Problem (PRTBP). This model is particularly useful for investigating the dynamics within such systems. Radzievskii is credited with being the first to consider this problem, discussing it in the context of three bodies: the Sun, a planet, and a dust particle [
2]. His work showed that accounting for direct solar electromagnetic radiation alters the positions of the equilibrium points. Since then, many researchers have explored the effects of radiation pressure on the dynamics of these systems (see [
3,
4,
5,
6,
7,
8,
9], among others). Another key area of research in the PRTBP involves the computation of families of periodic orbits [
10,
11,
12,
13]. Additionally, there are various extensions of the three-body problem that include more than two finite bodies. For example, when a planetary system consists of three primary bodies (such as one, two, or three stars) and a small mass, it leads to the Photogravitational Restricted Four-Body Problem. This is an area of ongoing study with several contributions (see, for example, [
14,
15,
16,
17,
18,
19]). These models are highly relevant because they more accurately reflect the dynamics of real-world systems. The studies mentioned above are instrumental for understanding the modified dipole problem discussed in this paper, and their findings will certainly aid in its analysis.
Asteroids, unlike planets, are small celestial bodies with irregular shapes and feeble gravitational fields. These distinct characteristics make the study of the forces affecting objects near asteroids critical for space missions targeting these bodies. Recent research has rekindled interest in understanding the dynamics of particles in the vicinity of asteroids, particularly those with elongated or irregular forms. In [
20], the equilibrium points of twenty-three minor celestial bodies were explored, such as asteroids, comets, and planet moonlets by utilizing advanced radar data to model their gravitational fields. Their work highlighted how the distribution, location, and stability of equilibrium points are strongly influenced by the shape, mass distribution, and rotational period of the bodies in question. In a similar line of inquiry, in [
21], a perturbed version of the restricted three-body problem was examined, focusing on a system where the smaller primary has an elongated shape and the larger one is oblate, and emits radiation. In [
22], a model of two elongated bodies linked by a massless rod (the dipole configuration) was addressed, paying particular attention to the stability of equilibrium points when gravitational forces outweigh centrifugal forces. Their work was later extended by the authors of [
23], who provided further insights into the specific conditions under which stability could be achieved. Particularly, in [
22], it was shown that external collinear equilibrium points
are linearly unstable, while in [
23] it was demonstrated that the inner equilibrium point
exhibits conditional stability in some cases, adding thus another layer of complexity to the dynamical behavior of this problem. Furthermore, triangular equilibrium points
were found to be conditionally stable.
Furthermore, in [
24], the dynamics of a rotating dipole mass system was investigated, a model that can describe synchronous asteroid systems. That work introduced several modifications to the traditional dipole model with follow-up studies, exploring various perturbative effects on the system [
25,
26]. Recently, new perturbed versions of the CRTBP that consider the effects of quantum corrections have been introduced [
27]. Based on that work, in [
28], this model was simplified by effectively creating the quantized Hill problem. These new models represent a step toward a quantized version of the restricted three-body problem, opening up new avenues for the study of small celestial bodies under the influence of both classical and quantum effects.
The Circular Restricted Synchronous Three-Body Problem (CRSTBP) represents an extension of the classical dipole model by incorporating a more complex set of dynamical equations. This problem examines the motion of a negligible mass within a system consisting of two massive bodies in circular orbits around their common center of mass. In this system, one body is modeled as spherical while the other is represented by a synchronous rotating dipole formed by two hypothetical bodies of equal mass separated by a fixed distance. Building on the foundational work of the classical dipole model, in [
29,
30], the CRSTBP was analyzed, investigating the periodic orbits, accessible regions of motion, positions and stability of equilibrium points. Drawing inspiration from [
29], in [
31], this analysis was extended by examining the equilibrium points and their linear stability within the elliptic restricted synchronous three-body problem that includes a mass dipole. Additionally, within the same framework, in [
32] the effects of oblateness in the larger primary body were explored, focusing on the stability and velocity sensitivities of the libration points in the elliptic restricted three-body context. Recently, in [
33], the equilibrium points and Lyapunov families were investigated, incorporating an oblate parameter in the CRTBP with a rotating mass dipole. Their work further refines the understanding of the system’s stability and the complex dynamics surrounding the equilibrium points and the associated families.
Moreover, a particle located near the surface of an asteroid is subject to intricate perturbations, which can result in either a collision with the asteroid or an escape from its gravitational influence. Analyzing these perturbations is critical for identifying spatial regions where stable natural orbits around asteroids can exist. Research in this domain has demonstrated that significant disturbances arise due to solar radiation pressure (SRP) and the irregular gravitational field of the asteroid caused by its non-spherical shape. Through a combination of analytical and numerical approaches, in [
34], the orbital stability regions for small particles near a spherical asteroid were investigated. Their findings revealed that SRP plays a dominant role in displacing such particles from the circumasteroidal zone, highlighting its efficiency in destabilizing orbits in these environments.
The current study extends the framework of the CRSTBP with a mass dipole, initially formulated by Santos et al. [
29,
30], to introduce the photogravitational restricted three-body dipole problem. While the original model effectively described the dynamics of a test particle influenced by two massive bodies in synchronized rotation, it did not account for the influence of radiation forces, which are crucial for accurately modeling many real astrophysical and space systems. The motivation for this extension arises from the increasing need for higher fidelity systems where radiation significantly affects the motion of small bodies, such as spacecraft, dust grains, comets, and asteroids. Radiation pressure acts as a non-negligible perturbation capable of altering trajectories, causing dust grains to either escape the solar system or spiral inward, and influencing spacecraft dynamics near radiative bodies; see, e.g., [
35,
36]. This is especially relevant for the study of binary or multiple asteroid systems, stellar binaries, and other radiating celestial systems. A key innovation of our model is the assumption that the larger primary acts as a radiative source rather than a simple point mass or spherically symmetric body, allowing us to investigate the coupled effects of gravitational and radiative forces. Specifically, we analyze how the radiation pressure factor
the force ratio parameter
, and the mass parameter
influence the system’s dynamics. We also explore the regions of allowed motion, governed by the Jacobian constant
C and examine the equilibrium points’ positions and stability, which are critical for understanding the overall structure and behavior of the system. These points serve as natural anchors for the motion of the test particle and are targeted in spacecraft mission design due to their stability characteristics. Investigating how radiation influences these equilibrium points may offer valuable insights for improving the accuracy of trajectory design in deep-space missions, especially near radiating celestial bodies. As an application, we numerically investigate periodic orbits emanating from the collinear equilibrium points of the triple asteroid system 2001SN
263 [
37], demonstrating that both radiation and the force ratio significantly impact the periods and stability of the computed orbits.
The structure of the present study is organized as follows: In
Section 2, we derive the equations of motion for the photogravitational CRSTBP, incorporating the effects of a rotating mass dipole and the associated Jacobi integral.
Section 3 focuses on the determination and characterization of the equilibrium points under varying perturbative forces.
Section 4 and
Section 5 provide an in-depth analysis of the system’s dynamics, with
Section 4 examining the topological properties of zero-velocity curves and
Section 5 assessing the linear stability of the equilibrium points. In
Section 6, we study periodic orbits emanating from all collinear equilibrium points, while the key findings and broader implications of the study are summarized in
Section 7 and
Section 8.
2. Equations of Motion
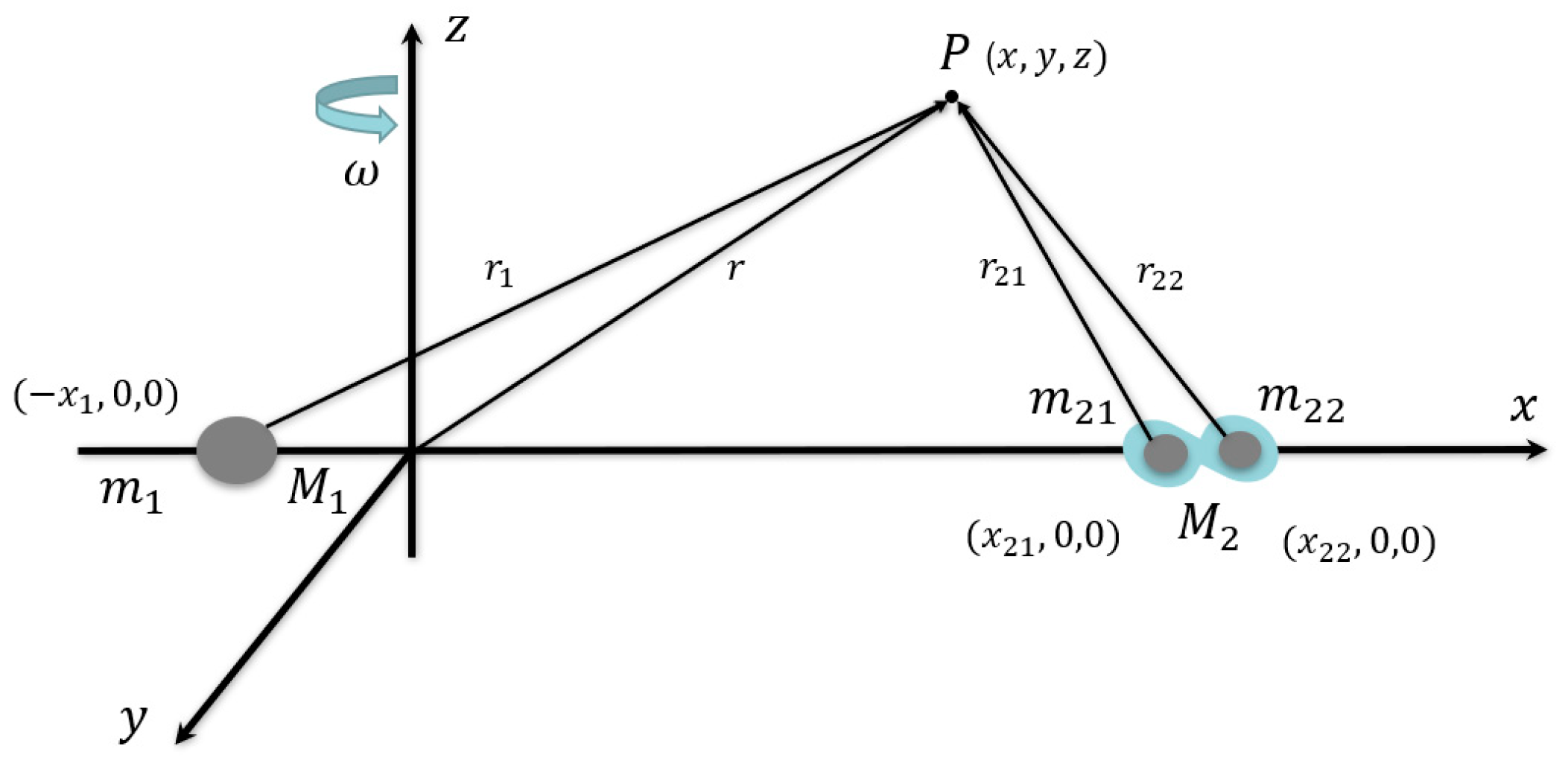
We investigate a planar CRTBP in which two massive bodies,
and
(the primaries, with masses
and
, respectively), move under their mutual gravitational attraction. At the initial time, both bodies are aligned along the horizontal
-axis, with
positioned on the positive
-axis. The system is confined to the same plane and an additional infinitesimal body of mass
moves within this plane, influenced by the gravitational attraction of the primaries. However, due to its negligible mass, it does not perturb their motion. Unlike the classical restricted three-body problem, the secondary body
is not a single mass but rather a dipole system consisting of two identical components,
and
, separated by a fixed distance
. The total mass of the dipole is given by
. Defining
as the mass parameter, we set
. Let also
,
and
be the respective distances of
and
from the infinitesimal body (see
Figure 1). For simplicity, the system is described in a dimensionless framework. The unit of distance
D is normalized to the separation between
and the center of mass of the dipole
, and time, with
ω−1. Similarly, masses are scaled appropriately. In these canonical units, the total system mass,
is set to unity, leading to
with
. The mass ratio satisfies the constraint
where
[
33]. Following the conventions established in [
30,
33], we describe the motion of the infinitesimal body within the rotating frame of the dipole system. The governing equations in three dimensions take the form:
where the dots indicate derivatives with respect to time and the effective potential
in the co-rotating frame, expressed in synodic coordinates, given by:
in which
In this context, the distances from the infinitesimal third body to the two primaries are denoted as
and the dimensionless parameter,
, represents the ratio of gravitational to centrifugal forces, commonly known as the ‘force ratio’. The total mass refers to the combined mass of the two primaries, and the angular velocity, denoted by
ω, describes their relative rotation. The distance between the two hypothetical point masses, that is, the length of the secondary body
M2 is denoted as
d, and
G is the gravitational constant with a value of
. When the force ratio equals one, the gravitational attraction between the two primaries balances the centrifugal force due to their rotation. For values of the force ratio less than one (fast rotation), the centrifugal force exceeds gravitational attraction, requiring tensile stress in the connecting rod to maintain the separation between the bodies. For values of the force ratio greater than one (slow rotation), compressive stress is needed in the rod to maintain a constant distance between the primaries [
22,
24]. Thus, the force ratio ranges from zero to infinity, i.e.,
with the case of a force ratio larger than one, i.e.,
being more common. This is typically observed in binary asteroids where a squeezing force is present between the two components due to their slow rotation.
When the primary body
is radiating with radiation coefficient
, the modified equations of motion of the third body with the allowance for the radiation force of the larger primary and rotating dipole secondary are finally written in the form [
30]
with
The energy-like integral (known as the Jacobi integral) of this problem is given by the expression:
with
, where
C is the Jacobian constant. A considerable amount of literature has explored its use in analyzing possible motions, including the identification of stability or instability. The mass reduction factor on the particle (see, e.g., [
5]) is given by the relation
, such that
, where
is the radiation coefficient defined as
where
is the force due to radiation and
expresses the gravitational force. Note that an increase in radiation pressure leads to a decrease in the mass reduction factor, provided that the gravitational force remains unchanged. It should be noted that when the bigger primary does not radiate (namely,
), the equations of motion are the same as those in [
30], while we obtain the gravitational restricted three-body problem when
and
[
1]. Recall here that the distance
D between the more massive primary asteroid, treated as a radiation source, and the center of mass of the dipole body
, consisting of two hypothetical components, is assumed to be constant.
3. Existence and Location of the Equilibrium Points
The CRTBP is well known for having five equilibrium points (EPs). Three of these (
and
) are collinear and situated along the
x-axis, while the remaining two
and
are non-collinear and lie off the
x-axis. In the case of the CRTBP involving a rotating mass dipole, which represents an elongated rotating body, the number, location, and stability of these equilibrium points are further influenced by the mass parameter and the rotational effects of the secondary body [
22,
24,
32,
33]. Moreover, the introduction of photogravitational perturbations, such as radiation pressure from a radiating primary, adds further complexity to the system, making the characteristics of the equilibrium points highly sensitive to the radiation coefficient. In such systems, equilibrium points are classified as natural or artificial, where natural points arise from the intrinsic balance of gravitational, centrifugal, and radiation forces, while artificial points are established through continuous control forces, such as those generated by solar sails. As demonstrated by Zeng et al. [
38,
39], solar sails with variable lightness numbers enable spacecraft to achieve body-fixed hovering over elongated or irregular asteroids, positions that do not naturally exist in the gravitational potential alone.
In this study, we focus on analyzing the natural equilibrium points that emerge within the CRSTBP framework, incorporating both the radiative effects of the primary and the mass dipole influence of the secondary. We examine their existence, location, and stability, providing insights into the intrinsic dynamical structures that govern motion near binary asteroid systems. The equilibrium conditions are
such that the equilibrium points
are solutions to the equations:
Numerical analysis reveals that the equilibrium points are confined to the
plane, independent of the parameter values. For motion in the
plane (
, the equilibrium points (
) in this dipole model are solutions to the equations:
with
From Equation (8), we observe that the existence, number, and position of stationary points vary with the magnitude of the mass ratio
, force ratio
, dipole distance
, and radiation pressure parameter
. Through numerical computations, we observed that the problem admits at most six EPs. Four of them are collinear, i.e., on the
-axis, which are posed on the positive axis between
and
(
), on the positive axis outside
(
), on the negative axis outside
(
), and the fourth one on the positive axis (
) located always at
, i.e., at the center of
, and two of them are non-collinear (
), away from the
-axis. The positions of the coordinates of the EPs on the (
) correspond to the intersections of the equations
(red curve) and
(blue curve). In
Figure 2 we depict the locations of the equilibria, when
,
,
, and
.
We remark here that, in the case of irregularly shaped celestial bodies, such as asteroids or comets, the inner equilibrium points at the body’s center may hold significant relevance, since many of these bodies remain largely unexplored, with properties like surface composition and density inferred from indirect measurements [
20]. Additionally, the nature and stability of the equilibrium points within these bodies can offer insights into their internal structures and stress distributions, potentially aiding in the study of their failure modes.
It should be pointed out that setting
the system degenerates to the classical RTBP with five equilibrium points obtained at similar positions with respect to the classical equilibrium points. The present dynamical system contains total four parameters determining the potential distribution of the modified dipole model: namely, the mass parameter
, the force ratio
the radiation parameter
and the secondary mass dipole distance parameter
. Meanwhile, previous studies explained the presence of new additional equilibrium point in the dynamical system when
and considering
(see, e.g., [
32,
33]). In this context, the present study investigates how the force ratio and radiation pressure parameters affect the positions and stability of equilibrium points, as well as the regions of motion accessible to the infinitesimal body. The permissible region for mass parameter
is taken to be
region of radiation factor is
rotation of the asteroid is
while the mass dipole distance is
.
In this section, we separately consider the effect of each one of these two parameters [, ] on the positions of the classical five equilibrium points (but now there is also the fourth collinear point, , located at is located inside of the rotating dipole and suffers negligible effects from the elongation of the secondary body, force ratio of the primaries, and radiation pressure of the primary body, so the results related to this point are not shown here in detail and only other five equilibrium points are considered.
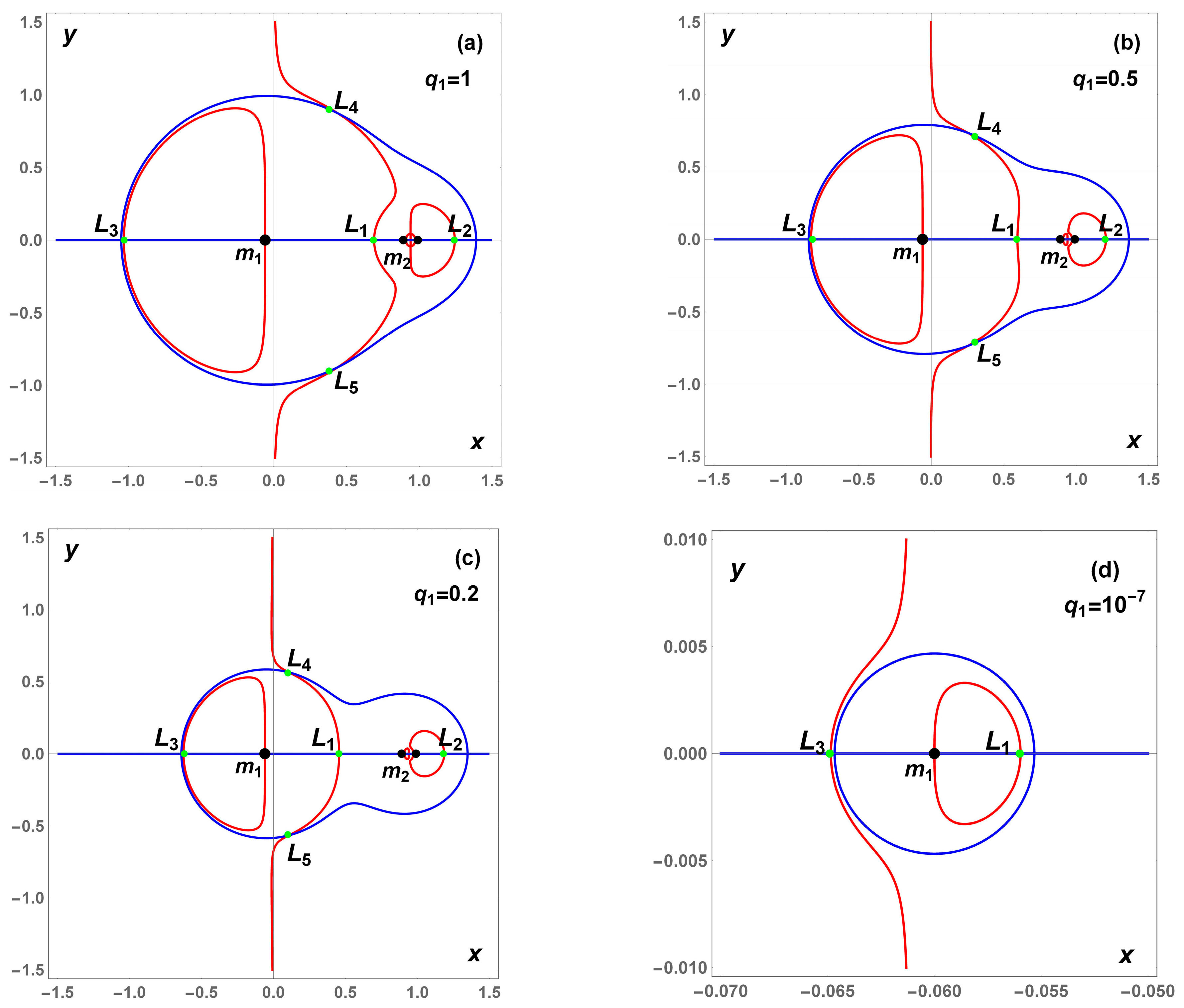
To explore the impact of radiation pressure on the equilibrium points’ positions, we analyze three distinct values of the radiation pressure factor; i.e.,
and
when values of
and
are fixed. In
Figure 3, this effect is shown. In frame (a), we consider the gravitational case
while in the last two frames (frame b and frame c) we consider that the primary body radiates
and
correspondingly), so we can see how the radiation factor,
effects the dynamical problem. The equilibria
approach
, while
approaches
as the radiation factor increases. It is seen that the locations of the equilibrium points
are more sensitive to varying radiation pressure in the primary body, compared to
. When the parameter
decreases (extreme radiation) the triangular (non-collinear) equilibria go to the massive primary
along the
Oy axis. In the same vein, our numerical calculations suggest that with the increase of
the boundary value of
for the existence of
decreases. For instance, for a value of
=
, the non-collinear points
and
coincide on the collinear point
, and, therefore, the problem has then four collinear equilibrium points (
,
,
and
). Panel 3d shows a zoom of the region close to the primary body
where the equilibria
disappear by coalescing at
A similar behavior is observed in the PCRTBP, where increasing radiation pressure factors (i.e., decreasing
values) cause the triangular equilibrium points
to move toward the inner collinear point. Eventually, they merge along the axis, transferring their stability to
in the process [
4].
In the gravitational CRTBP with elongated bodies triangular equilibrium points are only present for
[
22]. When
the equilibrium point
coincides with the positions of
and
In the photogravitational version, where the primary body radiates, we find that for any
there are combinations of parameters
and
that enable the existence of non-collinear equilibrium points. Specifically, the critical value of
k, at which
and
vanish, is influenced by
.
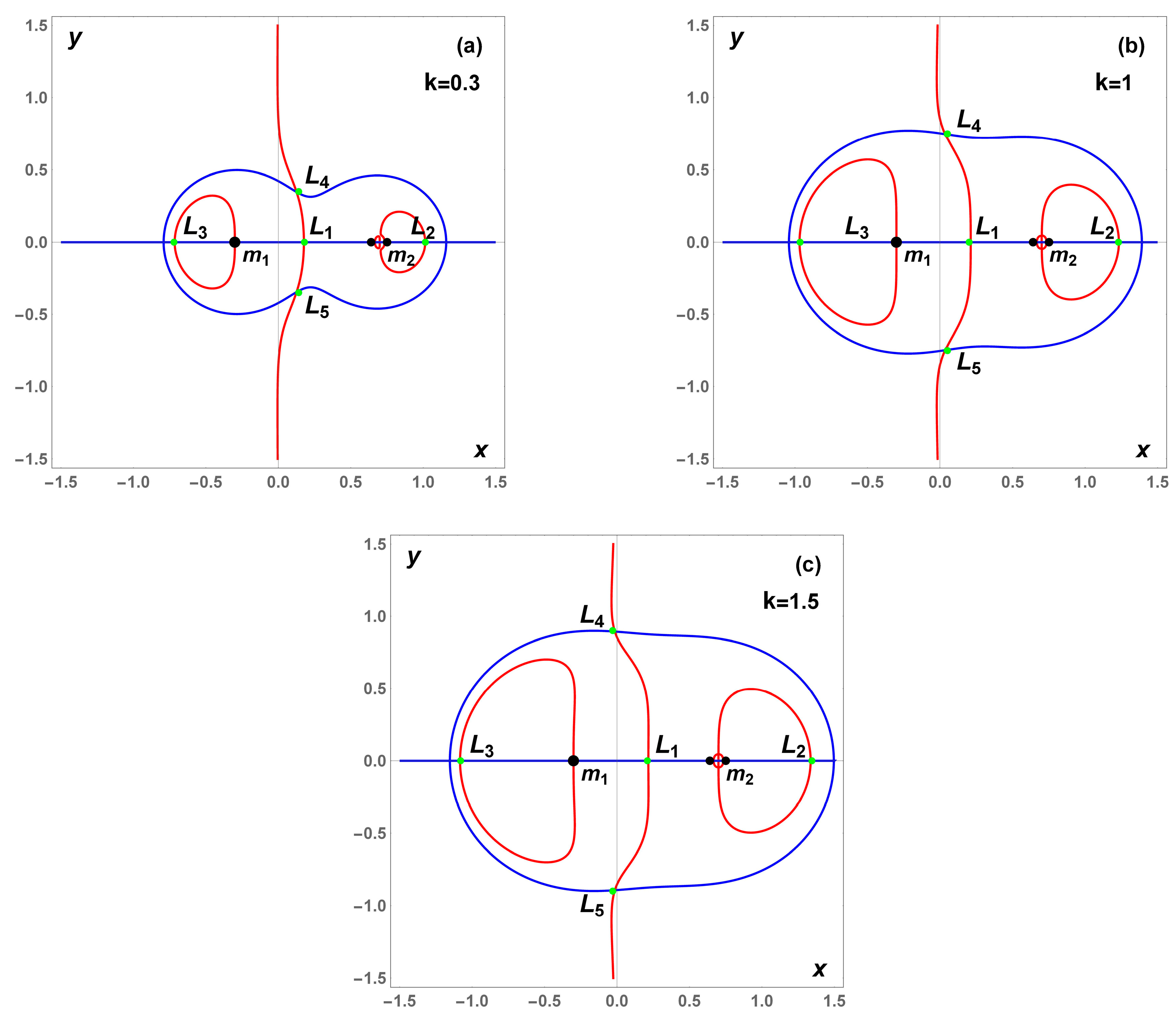
In
Figure 4, the evolution of the five EPs of the problem for
,
, and
and for several values of the force ratio
k, are illustrated. This means that only the force ratio parameter
k varies, i.e., for
and
correspondingly.
Figure 4, shows that
and
shift away from
and
respectively, while
and
increase from
and the origin correspondingly as the force ratio increases. We remark that the effects of rotation rate (force ratio) of bodies on
are very significant, but does not essentially change the position of
Our numerical analysis reveals that, as
approaches 0 for varying values of
the triangular points
and
gradually move towards
, eventually merging into a single point. Furthermore, in our study, four collinear equilibrium points,
,
,
and
, are found to exist for all values of the parameter
Therefore, based on the analysis in
Figure 4, we conclude that the force ratio plays a crucial role in determining both the existence and the positions of the equilibrium points.
4. Zero-Velocity Curves (ZVCs) in the () Plane
The contours of Relation (6) for zero velocity produce the zero velocity curves (ZVCs) of this problem. The resulting curves determine regions where the infinitesimal third body is permitted to move () and where it is forbidden to move () for certain values of the Jacobi constant C. We now turn to illustrate the ZVCs in the () plane for several values of the radiation factor and force ratio .
In
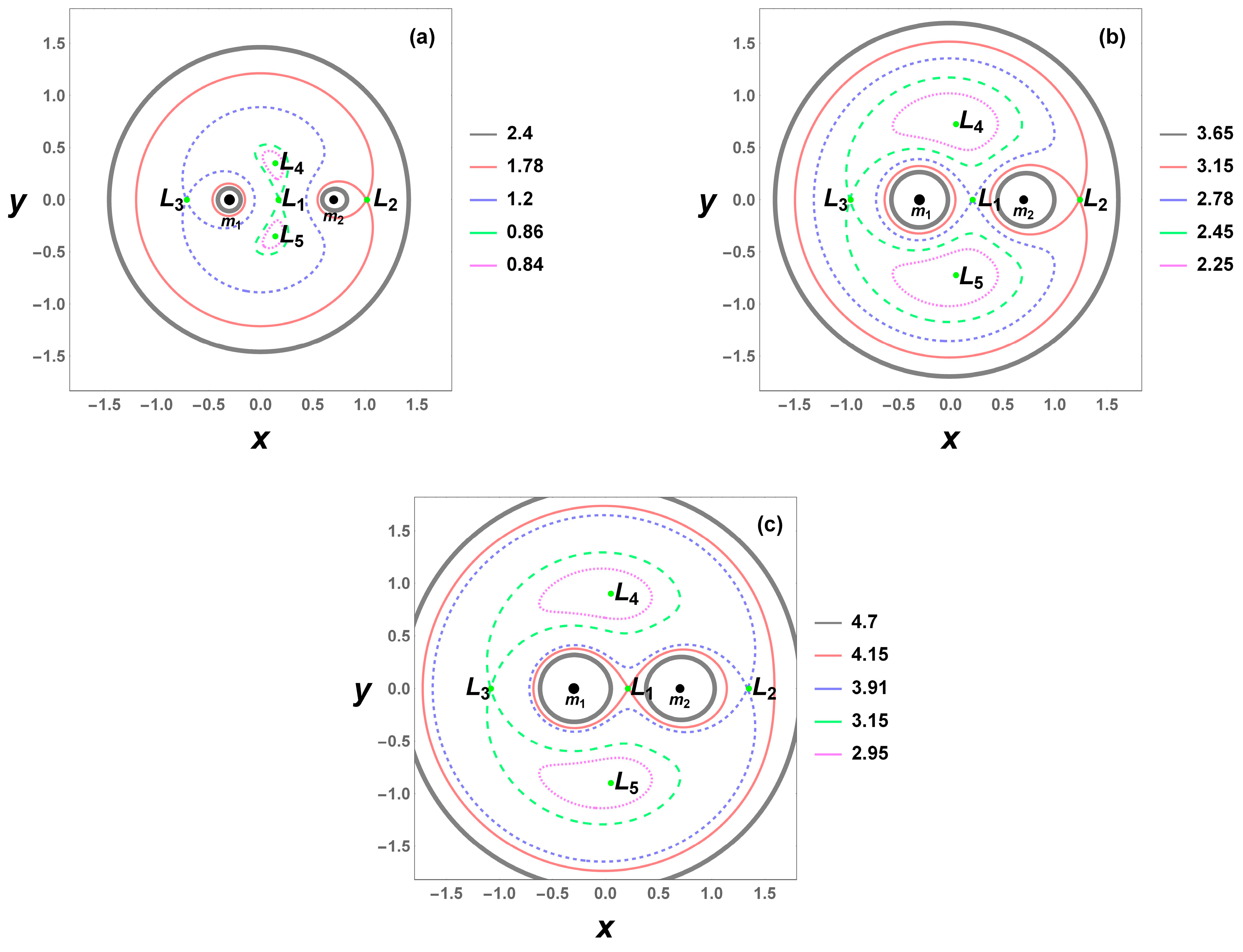
Figure 5, we have plotted the ZVCs corresponding to the values of the Jacobian constant
C computed at the collinear equilibrium points (red, blue, green curves) as well as to values of the Jacobian constant
C slightly higher than the values of
C computed at the non-collinear points (magenta curves) for fixed values of the parameters
,
, and
when the bigger primary radiates. In all frames, ZVCs are classified from the larger to smaller value of the Jacobian constant
C. In
Figure 5a, we plot the ZVCs for
(classical dipole model) and for
and
. We observe that the third body can move around the two primary bodies
and
only for
. In
Figure 5b,c, we consider the cases when the primary body
radiates. We present them for two values of the radiation factor,
and
respectively. In the first case, we plot the curves for
,
,
, and
. When
a channel is created joining the body
and the third body can move from
to
and vice versa. In the second case, where we plot the ZVCs for
,
,
, and
. We observe that the third body can move around the two primary bodies
and
only for
. Note, symbol
is used to state very small differences between the values of the corresponding Jacobian constants as long as these points exist in the figure. Also, we remark that the energy integral is a surface with
C arbitrary constant and we choose such
C in the figures, in order to obtain the appropriate projection of the surface on the
plane.
From the results in
Figure 5, we can observe three main results. The first is that along with the increase of
from 1 to 0.2 noticeable changes in the ZVCs can be found at the region between the primary bodies
and
transforming from the nearly connected region to a more trapped area. The second is that between the collinear equilibrium points, the ZVCs form ovals of regions not allowed to motion, and shrink along with the increase of
from 1 to 0.2. It is evident that the region surrounding the primary body remains more confined compared to that of the secondary. The third is that the third body can orbit the primaries at progressively lower values of the Jacobi constant
C corresponding to the collinear equilibria, as radiation pressure increases. In particular, we note in the second and third frames that the ZVCs open firstly for
and
correspondingly, compared to the gravitational case (
Figure 5a), which opens for
. Consequently, the permissible regions of motion for the infinitesimal body are highly sensitive to both the Jacobi constant and the radiation pressure factor.
Similarly, in
Figure 6, we present the ZVCs corresponding to the exact values of the Jacobian constant
C computed at the collinear equilibrium points (red, blue, green curves) as well as to values of
C slightly higher than the values of
C computed at the non-collinear points (magenta curves) for fixed values of the parameters
, and for three values of the rotation parameter
. In
Figure 6a, we have ZVCs for
(fast rotation) and
, and
. We observe that the third body can move around the two primary bodies
and
only for
. In
Figure 6b, we have curves for
(classical rotating mass dipole) and for
, and
. In this case, only for
can the third body move from
to
and vice versa.
Figure 6c shows the case for
(slow rotation) and for
, and
. And, in this case, only for
can the third body move from
to
and vice versa. In
Figure 6, the topological structure changes significantly along with the increase of
and we can observe three main results. First we observe that the third body can move from one primary to the other one only for
(
Figure 6a),
(
Figure 6b), and
(
Figure 6c) as closed zero velocity are formed around each of the two primary bodies
The second is that, along with the increase in
from 0.3 to 1.5, noticeable changes in the ZVCs can be found at the region between the primary bodies
and
transforming from the trapped area to the nearly connected region. In particular, the nearly connected region varies in a small range of curves with
(
Figure 6b,c) compared to that with
(
Figure 6a). This shows that fast-spinning asteroids have greater impact on the regions not allowed to motion than the slow-spinning ones, comparing
Figure 6a
with
Figure 6c
The third is that the third body can orbit the primaries at progressively higher values of
C corresponding to the collinear equilibria as force ratio parameter increases. We conclude that allowed regions of motion to the infinitesimal body strongly depends on the value of the Jacobi constant and the rotation rate (force ratio
).
5. Linear Stability of the Equilibrium Points
To analyze the stability of the EPs, we shift the coordinate system so that the origin coincides with
by adopting small displacements
, and
from the equilibrium points such that
where
represent the coordinates
associated with the equilibrium point
The variational equations describing the linearized dynamics of small perturbations are expressed as:
while the involved partial derivatives are computed at the equilibrium points and are given by:
where
and
are
We define the state variable vector of the third body with respect to the stationary points
, and write Equation (10) as
where the coefficient matrix
is time-independent and can be written as
Here,
and
denote the
zero matrix and identity matrix, respectively, while the remaining two matrices are defined as follows:
Due to the symmetry of the configuration with respect to the
xy-plane, the equilibrium points lie on this plane and take the form
Under this symmetry, the third equation of system (10), governing the motion in the
z-direction, becomes independent of the in-plane variables
and
depending solely on the parameters
and
This decoupling allows the system to be effectively reduced to four dimensions by eliminating the
and
components. Consequently, all mixed second-order partial derivatives involving
vanish at the equilibrium points, simplifying the stability analysis [
30]. Hence, the characteristic equation of matrix
(Equation (12)) or system (10) is
and its eigenvalues are:
with
According to the Lyapunov stability theorem, linear stability is achieved when all four roots of the characteristic equation for
λ are purely imaginary. This implies that the characteristic equation has four eigenvalues of the form:
with
which will be shown through the following necessary, as well as sufficient, conditions:
We note that the quantities while and obtain for the collinear equilibrium points, while for the noncollinear equilibrium points.
In the present problem, the stability of the EPs depends on the specific values of the involved parameters,
and
. In the classical rotating mass dipole problem
, it has been demonstrated that the collinear EPs
and
are unstable for all values of the system parameters. In contrast, the stability of the collinear point
and the triangular EPs
and
(when they exist) is conditional, depending on specific values of the mass parameter
and force ratio
[
22,
23]. We observed similar results in the classical synchronous RTBP with
, where the stability of the collinear and triangular EPs depends on the parameters
,
, and
(for details see [
29,
30]), while, in the photogravitational version, we observe that the stability of the equilibria of the problem depends on the radiation coefficient
of the larger primary body as well. So, we computed the stability zones around the EPs for the classical rotating dipole problem, and in order to compare it with the photogravitational case, we computed the stability when the radiation factor has large values.
The results of the eigenvalues of the collinear and non-collinear equilibria by varying
and
with and without radiation factor for fixed
are presented in
Table 1,
Table 2,
Table 3 and
Table 4.
Table 1 and
Table 2 show the four roots
of the collinear equilibrium points for
and
, respectively, with
for the range of the mass parameter
, and the force ratio (
). In this case, for every value of system parameters
, and
, the equilibrium points
,
are always linearly unstable since, for the equilibria (
,
), the characteristic Equation (15) has two real eigenvalues
(causing the instability of the equilibria) and the other two are purely imaginary, i.e.,
, where
and
are real numbers while in contrary, there are values of the problem parameters where the inner collinear point
becomes stable due to pure imaginary roots (boldface roots). Our analysis reveals that the model parameter
,
and
significantly contribute to the reduction of the stability zone area. The progressive shrinkage of the stability region, mainly for positive values of
, from the gravitational case (third column of
Table 1) to the photogravitational case (third column of
Table 2) when the radiation factor has large values, is apparent. In particular, due to the radiation pressure, the stability part of the collinear equilibrium point
decreases where the range of
drops from
, when
to
, and when
.
An examination of the results in
Table 1 and
Table 2 leads to the conclusion that the stability of EPs
,
remains unaffected by the radiation pressure from the primary body
, and these points remain unstable across all values of the radiation parameter
. However, strong radiation pressure from
increases the unstable region surrounding the collinear equilibrium point
, expanding it compared to the case where radiation pressure is absent over a wide range of
and
.
Similarly, in
Table 3 and
Table 4, the characteristic roots of non-collinear equilibrium point
for
and
, respectively, are presented for the range of mass parameter
and force ratio in the interval
when
. The idea is to be able to discern the effects of these parameters (
,
,
) on the stability outcome of the non-collinear points. From results in
Table 3 and
Table 4 we observe that stable zone for
decreases as the radiation pressure increases (i.e.,
decreases) when increasing both the mass and force ratio parameters of the primaries. In particular, the unstable zone is larger when the primary body is a radiation source with
than when it is not (
). This shows that the radiation pressure is a destabilizing force. Moreover, we know from the classical RTBP that the triangular points are stable when
[
1]. In the present case (photogravitational rotating dipole problem), we observe from
Table 3 and
Table 4 that when
, all eigenvalues are imaginary quantities (stable motion). However, numerical computations show that when
(only the gravitational interaction between the two primaries exists) there are two real eigenvalues,
, (responsible for the equilibria’s instability) and two imaginary eigenvalues,
. This shows that the force ratio is a stabilizing force.
Based on the results presented in
Table 1,
Table 2,
Table 3 and
Table 4, we conclude that the linearization around the equilibrium points
, and
yields two real eigenvalues (saddle) and two purely imaginary eigenvalues (center), indicating the presence of a two-dimensional stable manifold and a two-dimensional unstable manifold. In contrast, the behavior around
and
varies depending on the system parameters. Specifically, for most cases in
Table 1, there are two pairs of purely imaginary eigenvalues, corresponding to a four-dimensional stable manifold.
Table 2, however, presents cases where complex saddle-type behavior emerges, with eigenvalues typically taking the form
In some instances, a pair of real eigenvalues and a pair of imaginary eigenvalues coexist, further enriching the system’s dynamical structure. For the triangular equilibria
most cases also yield two pairs of purely imaginary eigenvalues, as shown in
Table 3. However, in certain parameter regimes (
Table 4), a complex saddle-type structure emerges, similar to that observed at
This highlights that changes in system parameters significantly impact the topology and stability of the phase space near these points, particularly around
and
For the spatial problem, the characteristic equation governing the linearized system near the equilibrium points is given by (see, e.g., [
40]):
and the resulting eigenvalues determine the linear stability or instability of each equilibrium point. We computed the eigenvalues of this characteristic equation for the cases presented in
Table 1,
Table 2,
Table 3 and
Table 4 and observed that the nature of the eigenvalues is not influenced by the
-direction, confirming the decoupling of out-of-plane motion. In general, for
, and
the eigenvalues are of the form
, indicating a typical center
center
saddle structure. For
the system exhibits either purely imaginary eigenvalues of the form
corresponding to a center
center
center configuration or a combination of real and imaginary eigenvalues
leading to a center
center
saddle behavior. The triangular equilibrium points
mostly present a center
center
center structure with eigenvalues
but under certain parameter variations, they exhibit a center
complex saddle behavior characterized by eigenvalues of the form
For brevity, detailed eigenvalue computations are not displayed in the paper.
6. Periodic Orbits Around the Collinear Points
The study of periodic orbits in dynamical systems involving irregular gravitational fields is essential for understanding local stability and guiding mission design near asteroids and small bodies. Previous works, such as the investigation of periodic orbits around the dipole segment model for dumbbell-shaped asteroids [
41], have demonstrated how simplified models can capture key dynamical features, including orbit shapes, stability, and bifurcation behavior. Similarly, periodic orbits near irregularly shaped asteroids have been studied using indirect optimal control methods, which identify families of periodic solutions, such as Lyapunov orbits and inclined orbits, in the gravitational field approximated by a rotating mass dipole [
42]. These studies reinforce the crucial role of periodic orbit analysis in expanding the practical applications of simplified models to complex asteroid systems. In this context, our work extends the exploration of periodic orbits in the photogravitational restricted synchronous three-body problem with a mass dipole secondary, providing further insight into the stability and dynamical structure of such systems.
In particular, we investigate periodic motion in the vicinity of collinear equilibrium points within the context of the asteroid system 2001SN263. To this end, we conduct a numerical investigation of the well-known Lyapunov families of periodic orbits that emerge from the collinear Lagrange points and , as well as the additional equilibrium point To ensure a precise characterization of the dynamical environment, we adopt particular values for the mass parameter and the distance between the components of the rotating mass dipole. Given the complex gravitational interactions present in the system, our numerical investigation aims to explore the intricate dynamical structures and their dependence on key physical parameters. In particular, we systematically vary both the radiation parameter and the force ratio parameter to assess their influence on the stability and evolution of periodic orbits. This approach provides deeper insights into how these factors shape the dynamical properties of the system, ultimately contributing to a more comprehensive understanding of the motion around equilibrium points in asteroid systems.
More precisely, the triple asteroid system 2001SN
263 consists of three gravitationally bound bodies designated as Alpha, Beta, and Gamma, in order of decreasing mass. Alpha, the dominant central body, has a diameter of 2.6 km, while its two smaller companions Beta and Gamma measure 0.78 km and 0.58 km in diameter, respectively, and orbit Alpha [
43]. In this study, we focus on the Alpha–Gamma-spacecraft system as a practical application of our mathematical model, given that Gamma is an elongated body exhibiting synchronous rotation while Beta, being more distant from the other two central bodies, is neglected in our analysis [
29]. For this system, we assume that Alpha acts as the primary radiation source, while Gamma, due to its irregular shape, is modeled as a rotating mass dipole. Following [
44,
45], we adopt a mass parameter of
and set the dipole separation distance to
. The system’s short orbital period suggests it is in a minimal energy state [
46]. However, in our model, the parameter
deviates slightly from one due to the non-spherical nature of the binary asteroid system. This deviation aligns with the general behavior of most elongated binary asteroids, which tend to rotate slowly and experience internal forces that generate a compressive effect between the system’s components. The specific case where
represents the situation for slow rotating asteroids, such as 2001SN
263, which can be described within the framework of the restricted synchronous three-body problem [
45]. To further investigate the system’s dynamical behavior, we analyze the motion of a test particle in the vicinity of 2001SN
263 while varying the radiation pressure factor
as well as the force ratio parameter.
One of the fundamental properties of periodic orbits is their stability as it plays a crucial role in determining the overall dynamical behavior of a system. Stability analysis provides insights into the long-term evolution of trajectories, the feasibility of maintaining orbits and the sensitivity of motion to perturbations. In the context of the considered model, to study the stability of a periodic orbit we set
, and
thus, the equations of motion (4) are written in the following compact form:
In the four-dimensional phase space, the motion of the third body is entirely determined by its initial conditions and the evolution of time. This implies that for any given solution, the coordinates of the third body are uniquely defined as functions of both its starting position and velocity, i.e.,:
The partial derivatives of these coordinates with respect to the initial conditions satisfy the equations of variation, which describe how small perturbations in the initial state propagate over time (see, e.g., [
47]). These derivatives provide essential information about the system’s local stability and sensitivity to initial perturbations, and they are expressed in the form:
where
which are given by
and
while all the remaining partial derivatives are zero. The corresponding variations
for any orbit can be computed by integrating system (23) together with the equations of motion (4) of the problem. For the horizontal stability of a symmetric periodic orbit, we use the formulae which were introduced in [
48] and are given by:
where
is the initial state vector of this orbit and
is the value of the Jacobi constant evaluated at this initial condition while we have set for abbreviation:
A periodic orbit is stable if while it is unstable if . In the case of symmetrical orbits, it holds so they become and respectively. The condition must hold for the property of area preservation.
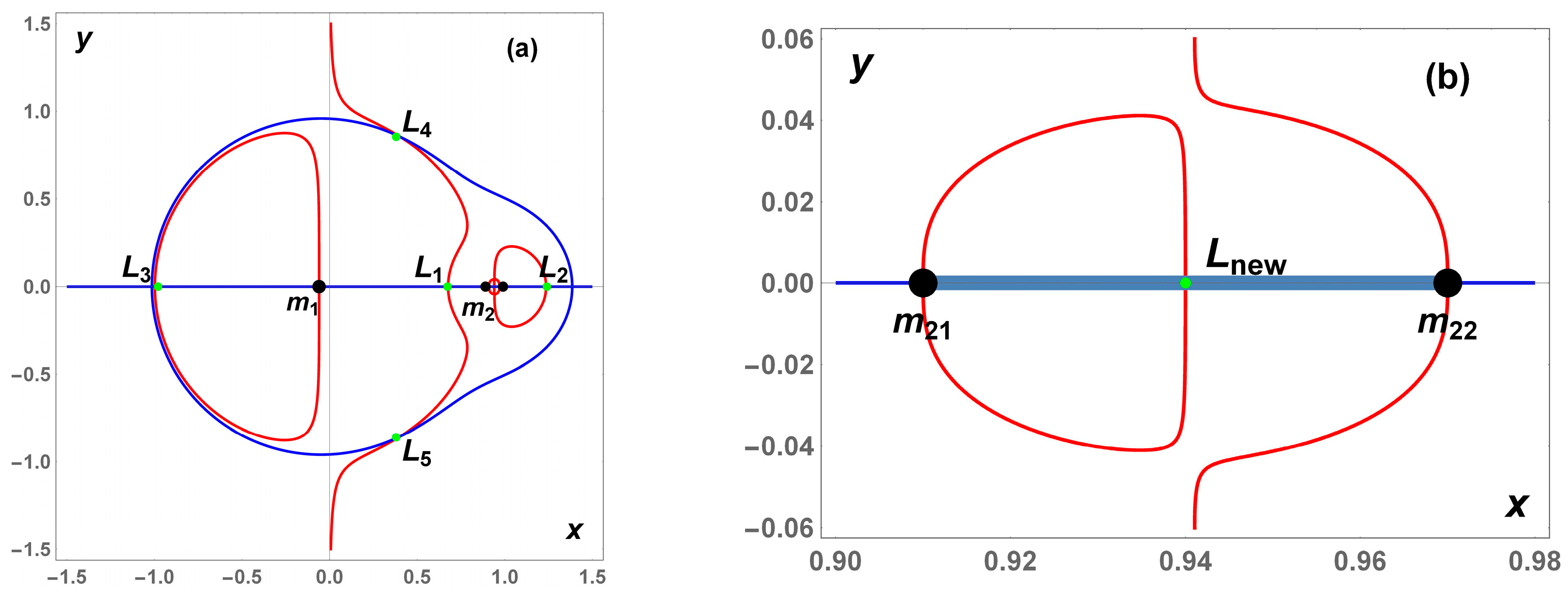
In
Figure 7 we present our numerical results. Each subplot of this figure shows the characteristic curves (blue lines) of the Lyapunov families emanating from the three classical collinear equilibrium points
and the newly identified collinear equilibrium point
in the context of the considered model. These curves are plotted in the plane of initial conditions
illustrating the evolution of periodic orbits under different parameter values. The shaded gray regions correspond to the case where motion is not allowed for the spacecraft. Across all frames, the mass parameter
ν and the dipole separation distance
d remain fixed, ensuring that the results specifically correspond to the Alpha–Gamma-spacecraft system, as discussed previously. The top row of
Figure 7, i.e., subplots (a)–(c), correspond to the scenario where the force ratio parameter is set to
. Within this configuration, the radiation pressure factor
is varied to assess its influence on the system’s dynamics. Particularly,
Figure 7a represents the case where no radiation pressure is exerted by the primary body
meaning that only gravitational force is considered.
Figure 7b and
Figure 7c depict cases where the primary body acts as a radiation source, with
and
respectively. In all three cases, the computed Lyapunov families terminate in collision orbits. Notably, the families originating from
and
reach these collision states at higher values of the Jacobi constant
C (marked by purple asterisks) compared to those emerging from the other collinear points. Additionally, all families evolve in the plane of initial conditions with decreasing values of the initial coordinate
In the bottom row of
Figure 7, subplots (d)–(e) explore the effect of varying the force ratio parameter
k, while keeping
meaning the primary body does not radiate.
Figure 7d examines a scenario where the force ratio parameter is halved
representing case with a faster rotation rate compared to
.
Figure 7e represents a case where the force ratio parameter is doubled
corresponding to a more slowly rotating system. From these variations, we observe that in the slow rotation case
the Lyapunov families emerging from
and
evolve differently compared to the other considered cases for the force ratio
Unlike the families in the top row and in
Figure 7d, which evolve by decreasing
the families now progress with increasing values of
This indicates a change in the dynamical structure of the system, emphasizing the role that rotational effects play in the evolution of periodic orbits.
In
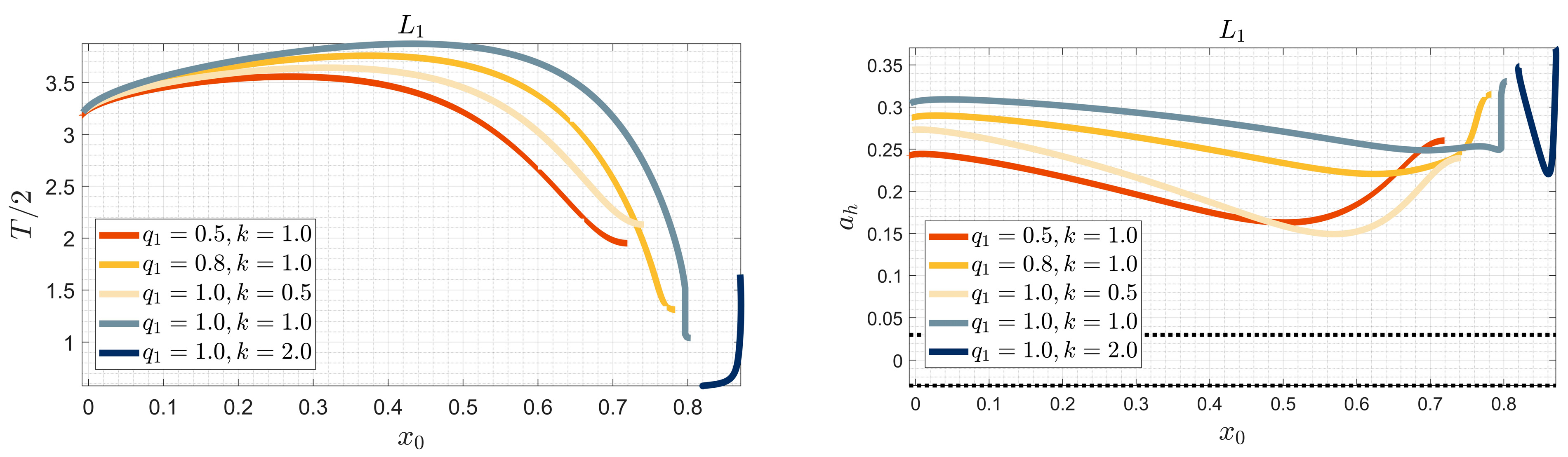
Figure 8, we present the evolution of all computed Lyapunov families in the
plane (left column), illustrating how the period varies as each family evolves for different parameter sets. The overall trend remains consistent across most cases, except for the fast rotation scenario
where the families emanating from
and
deviate significantly from the expected pattern, as also observed in
Figure 7. The right column of
Figure 8 displays the horizontal stability diagrams corresponding to each computed family. Recall that a periodic orbit is considered stable if the stability parameter satisfies the inequality
. However, given the large variations in
we employ the transformation proposed in [
49]:
where sign is the well-known sign function, and
c is a tuning parameter (set to
in our analysis). The transformed stability parameter allows for a clearer visualization of stability regions. From these diagrams, we observe that stability is only achieved in the families originating from the equilibrium point
while families emerging from the other equilibrium points remain unstable throughout their evolution.
Table 5 and
Table 6 provide some representative initial conditions for the computed Lyapunov families corresponding to different parameter combinations. Specifically, each table presents the half-period of the orbit
along with the initial position and velocity components
at the first orbit’s perpendicular intersection with the O
x-axis. Note, at this intersection, the remaining components are set to zero; i.e.,
and
. Additionally, we include the position component
from which we may define the orbit’s amplitude along the O
x-axis, as well as the corresponding Jacobi constant
C and the horizontal stability parameter
Table 5 examines the influence of the radiation pressure factor
on the infinitesimal periodic orbits while keeping the force ratio parameter fixed at
. The numerical results indicate variations in stability characteristics and Jacobi constant values as the radiation pressure changes.
Table 6, on the other hand, explores the effect of different values of the force ratio parameter
k while maintaining a constant radiation pressure factor
. The results highlight how variations in the rotational characteristics of the primary bodies affect the stability of periodic orbits. The data presented in both tables may serve as initial conditions for computing all the Lyapunov families examined in this study; therefore, they provide a valuable reference for analyzing them and assessing their stability properties across different parameter regimes.
7. Discussion
The dynamics of motion around equilibrium points in the modified synchronous circular restricted three-body problem (CRSTBP) were investigated, considering a radiating primary and a secondary modeled as a mass dipole. Unlike the classical three-body problem, the number and stability of collinear equilibrium points in this modified CRTBP are influenced by the perturbation parameters, namely, radiation pressure factor force ratio k, and dipole strength d. Our analysis reveals the existence of six equilibrium points, particularly, four collinear with the primaries and two non-collinear. The parameters and k affect the existence and location of equilibrium points. Specifically, an increase in reduces the critical value of k required for the existence of the triangular equilibrium points Furthermore, as increases, the positions of , and shift toward the primary mass , while, simultaneously, moves toward the secondary mass . Regarding the force ratio k, we observe distinct trends in equilibrium displacement: and move away from and , respectively, while and recede from , and the system’s origin as the dipole strength increases. These findings highlight the sensitive dependence of equilibrium configurations on system parameters, which is crucial for understanding the dynamics of the CRSTBP.
Zero-velocity curves (ZVCs) analysis showed that radiation pressure and force ratio significantly affect the Jacobi constant’s variations, creating different trapped regions where the third body can move. As radiation pressure increases, the third body can move freely around the primaries for lower values of C whereas higher C values make motion between primaries more feasible as k increases.
In the range and we found that the stability of the collinear equilibrium points , , and remains unaffected by the primary’s radiation pressure, and their stability is preserved regardless of . However, strong radiation pressure from reduces the stability region of , as evidenced by a decrease in the range of k from with to with . A comparison of the characteristic roots of the non-collinear equilibrium points obtained with and without radiation pressure reveals that with increasing mass and force ratio parameters of the primaries, the stability regions decrease as the radiation pressure increases, confirming that radiation pressure acts as a destabilizing force. Interestingly, we found that force ratio k can act as a stabilizing factor when the primary is non-radiating. For instance, in the classical case , two real and two imaginary eigenvalues emerge, leading to instability. However, when all eigenvalues are imaginary, ensuring stable motion.
Also, our analysis of periodic orbits of the triple asteroid system 2001SN263 emanating from the collinear equilibrium points revealed significant dependencies of the Lyapunov families’ evolution and stability on the system’s physical parameters. We found that, in cases of slow rotation, periodic orbits emanating from specific equilibrium points exhibit a systematic decrease in amplitude, whereas in fast-rotating systems, the evolution pattern deviates, particularly for families originating from equilibrium points and The stability analysis indicated that most families of periodic orbits are unstable, except from the Lyapunov family associated with the equilibrium point which was found to admit stable members across all the examined parameter sets. This result implies that mission designs targeting such systems should prioritize regions near to maximize long-term orbital stability.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}