1. Introduction
In this paper, we introduce a fractional Adams method with a modified graded mesh for solving the following nonlinear fractional differential equation, with
:
where
are arbitrary real numbers and
represents the Caputo fractional derivative, defined by:
with
denoting the Gamma function and
representing the smallest integer greater than or equal to
. The function
satisfies the Lipschitz condition with respect to the second variable, i.e.,
where
L is a positive constant.
We shall focus only on the case
, as
does not appear to be of significant practical interest ([
1], lines 4–5 on page 46). The error estimates for the case
can be derived in a similar manner.
It is well-known that Equation (
1) is equivalent to the following integral representation:
The existence and uniqueness of the solution to Equation (
1) have been thoroughly discussed in [
1].
The numerical solution of fractional differential equations (FDEs) has been a topic of significant research interest in recent decades due to their applications in fields such as physics, biology, and engineering [
2,
3]. Exact solutions for FDEs are often difficult to obtain. Therefore, it is necessary to develop some efficient numerical methods for solving FDEs.
In addition to Adams methods, other numerical techniques for solving FDEs have been extensively explored. One approach involves directly approximating the fractional derivative, as discussed in [
4,
5,
6]. Another transforms the FDEs into equivalent integral forms, which are then solved using quadrature-based schemes [
7,
8,
9,
10,
11,
12,
13]. Furthermore, alternative strategies, such as variational iteration [
14], Adomian decomposition [
15], finite-element [
16], and spectral methods [
17], have been developed to address specific FDEs.
The Adams methods, particularly the predictor–corrector variants, have received significant attention for their efficiency in solving FDEs. For instance, Deng [
18] enhanced the Adams-type predictor–corrector method by incorporating the short memory principle of fractional calculus, thereby reducing computational complexity. Nguyen and Jang [
19] introduced a new prediction stage with the same accuracy order as the correction stage, while Zhou et al. [
20] developed a fast second-order Adams method on graded meshes to solve nonlinear time-fractional equations, such as the Benjamin–Bona–Mahony–Burgers equation. Moreover, Lee et al. [
21] and Mokhtarnezhadazar [
22] proposed an efficient predictor–corrector method based on the Caputo–Fabrizio derivative and a high-order method on non-uniform meshes, respectively. These advancements help reduce computational effort while maintaining high precision.
Among the many numerical methods available for solving FDEs, Diethelm et al. [
1,
23,
24,
25] provided the theoretical foundation for the fractional Adams method. They proposed an Adams-type predictor–corrector scheme on uniform meshes and provided rigorous error estimates under the assumption that
. The method achieves convergence rates of
for
and
for
, where
N is the number of the nodes of the time partition on
. These results have since inspired various extensions and refinements. Liu et al. [
26] introduced graded meshes to better handle the singular behavior of solutions near
. Their analysis refined error estimates and demonstrated that graded meshes significantly improve accuracy for FDEs with initial singularities, making them a practical choice for challenging problems. Furthermore, fractional calculus is more flexible than classical calculus, and recently, some new fractional definitions have been developed (see [
27]). These developments provide new perspectives and tools for the numerical solution of fractional differential equations.
In this paper, we propose a modified Adams-type predictor–corrector method with a modified graded mesh. This type of mesh was first introduced in [
28]. The modified graded mesh employs a non-uniform grid near the initial point to capture weak singularities, while a uniform grid is used away from the initial point, effectively reducing numerical errors. Our approach not only preserves the advantages of traditional graded meshes but also further optimizes the grid distribution, improving the accuracy of the numerical solutions.
Let
be a partition; we shall consider the following modified graded mesh [
28]. Define
as a positive monitor function:
where
is a constant and
. The mesh is constructed such that
is evenly distributed, i.e.,
Define
and choose a suitable
such that
for some
. The modified graded mesh
is defined as follows:
where
. The grid points
constitute a non-uniform grid, whereas the grid points
form a uniform grid [
28].
Let
for
, with
being the approximation of
. Suppose we know the approximate values
,
from other methods. For
, we define the following predictor–corrector Adams method to solve Equation (
3) for
:
The predictor term
in (
5) is derived by approximating the integral
,
with the following approximation,
,
where
is a piecewise constant function defined on
as,
,
The corrector term
in (6) is derived by approximating the same integral,
,
with the following approximation,
,
where
is a piecewise linear function defined on
as,
,
Here, the weights
in (
5) for
are given in
Appendix A.
The weights
in (6) for
, satisfy
Assumption 1 ([
26])
. Let and satisfy for . There exists a constant such that: Remark 1. Assumption 1 characterizes the local behavior of near and indicates that exhibits a singularity at this point. It is evident that . A simple example is , where .
Our main results of this work are summarized in the following two theorems.
Theorem 1. Suppose and satisfies Assumption 1. Assume that and are the solutions of Equations (3) and (6), respectively. Then, the following error estimates hold, with .
- 1.
If , then we have - 2.
If , then we have - 3.
If , then we have
Theorem 2. Suppose and satisfies Assumption 1. Assume that and are the solutions of Equations (3) and (6), respectively. Then, the following error estimates hold, with .
- 1.
If , then we have - 2.
If , then we have - 3.
If , then we have
The structure of this paper is as follows. In
Section 1, we introduce the predictor–corrector method on modified graded meshes for solving Equation (
1).
Section 2 presents several lemmas for the case
, and
Section 3 discusses lemmas for the case
. In
Section 4, we provide proofs of the theorems.
Section 5 provides numerical examples demonstrating the consistency between the numerical results and the theoretical predictions.
Throughout the paper, the symbol C denotes a generic constant, which may vary across different occurrences but remains independent of the mesh size.
2. Some Lemmas for
Denote
where
P,
K,
are defined in (
4). Then,
in (
4) can be rewritten as follows:
where
,
,
and
J is defined in (
4).
Lemma 1. There exists a positive constant , such thatwhere J is defined in (4). Proof. Choose
such that, since
,
Note that
which implies that when
, we have
Choose
and we see that when
,
Further, we have
. In fact,
implies that
. Hence, with
,
Thus, for
, we obtain
The proof of Lemma 1 is complete. □
In the rest of the paper, we assume .
Lemma 2. Suppose and satisfies Assumption 1. Let .
- 1.
If , then we have - 2.
If , then we have - 3.
If , then we have
In the above, denotes a piecewise linear approximation of defined on each interval for , Proof. For
, we decompose the integral into three parts,
Using Assumption 1, we have
If
, since
, we have
If
, since
and
, we obtain
Thus, there exists a constant
such that
When
, by Lemma 1, we obtain
When
, we get
For
, we have, with
and
, by Assumption 1,
There exist
, such that
For
, when
, we have
Case 1. . There holds
For
, there exists
, such that
For
, we obtain
For
, by Lemma 1, we get
If
, we have
If
, we have
If
, we have
Hence, we obtain, with
,
For
, by (
13), (
14), and Lemma 1, we arrive at
Case 2. . For
, there exists
, such that
and
Thus, by (
15) and (
16), we get
Case 3. . For
, there exists
, such that
and
Thus, by (
17) and (
18), we arrive at
Next, we consider with .
Case 1. . For
, we have
By (
19), Lemma 1, and noting that
we obtain
Case 2. . We have
We first consider
. For
, we have
and
By (
21)–(
23), we arrive at
Now we turn to
. For
, we have
and, by Lemma 1,
and
Case 3. . For
, we have
and
By (
27)–(
29), we arrive at
For
, there exist
,
, such that
Using Assumption 1, we have, with
,
When
, by (
24) and Lemma 1, we obtain
When
, by (
17), we arrive at
Thus, for , noting and , we have the following cases.
If
, we have
If
, we obtain
The remaining cases can be considered similarly. □
The following Lemmas 3 and 4 hold for .
Lemma 3. Let and . The weights and defined in (7) and (8), respectively, satisfy the following properties: - 1.
For all , we have - 2.
For all , we have
Proof. For
, it holds that
For
, it follows that
Hence, we show .
Note that, with
,
Since the is positive over the integration interval, it follows that . □
Lemma 4. Let . For , we havewhere is defined in (6). Proof. By (
7), we consider two cases:
When
, we have
When
, we have
The proof of Lemma 4 is complete. □
Lemma 5. Suppose and satisfies Assumption 1. Let .
- 1.
If , then we have - 2.
If , then we have - 3.
If , then we have
Here, denotes a piecewise constant approximation of defined on for , Proof. The following proof is similar to the proof of Lemma 2. Let
For
, by Lemma 3 and Assumption 1, we obtain
For
, by Lemma 4 and (
10), we have
For
, by Lemma 4 and (
11), we have
For
, with
, where
, we have
For , we consider the following three cases:
Case 1. . We have
By Lemma 4, (
12), (
14), and
, we have
By Lemma 4, (
13), (
14), and Lemma 1, we have
Case 2. . By Lemma 4, (
15), (
16), and
, we have
Case 3. . By Lemma 4, (
17), and (
18), we have
Case 1. . By Lemma 4, (
19), and for
(with
), and noting that
we have
Thus, with
and
, by (
20), we get
Case 2. . We have
For
(with
), we have
Thus, By Lemma 4, (
21), (
31), and (
23), with
and
, we get
For
(with
), by Lemma 1, we have
Thus, By Lemma 4, (
24), (
32), and (
26), with
and
, we get
Case 3. . For
(with
), we have
By Lemma 4, (
27), (
29), and (
33), with
and
, we get
For
, for
, by Assumption 1, there exists
, such that
When
, by Lemma 4, Lemma 1, and
, we have
When
, by Lemma 4, we have
Thus, when
, for
, if
, we have
The remaining cases can be proven similarly. This completes the proof of Lemma 5. □
We remark that, in the proof of Lemma 5, some inequalities hold for . The following Lemma 6 holds for .
Lemma 6. Let , then there exists a constant such that the following inequalities hold,where and are weights defined by (5) and (6), for . Proof. We will prove inequality (35), while the proof of (
34) follows analogously.
where
denotes the remainder term. By setting
in the integral, we have
From Lemma 3, . Therefore, inequality (35) holds. □
5. Numerical Simulations
In this section, we will consider some numerical examples to illustrate the convergence orders of the proposed numerical method (6) under different smoothness conditions of . We focus on the case for . Similarly, we can consider the case for .
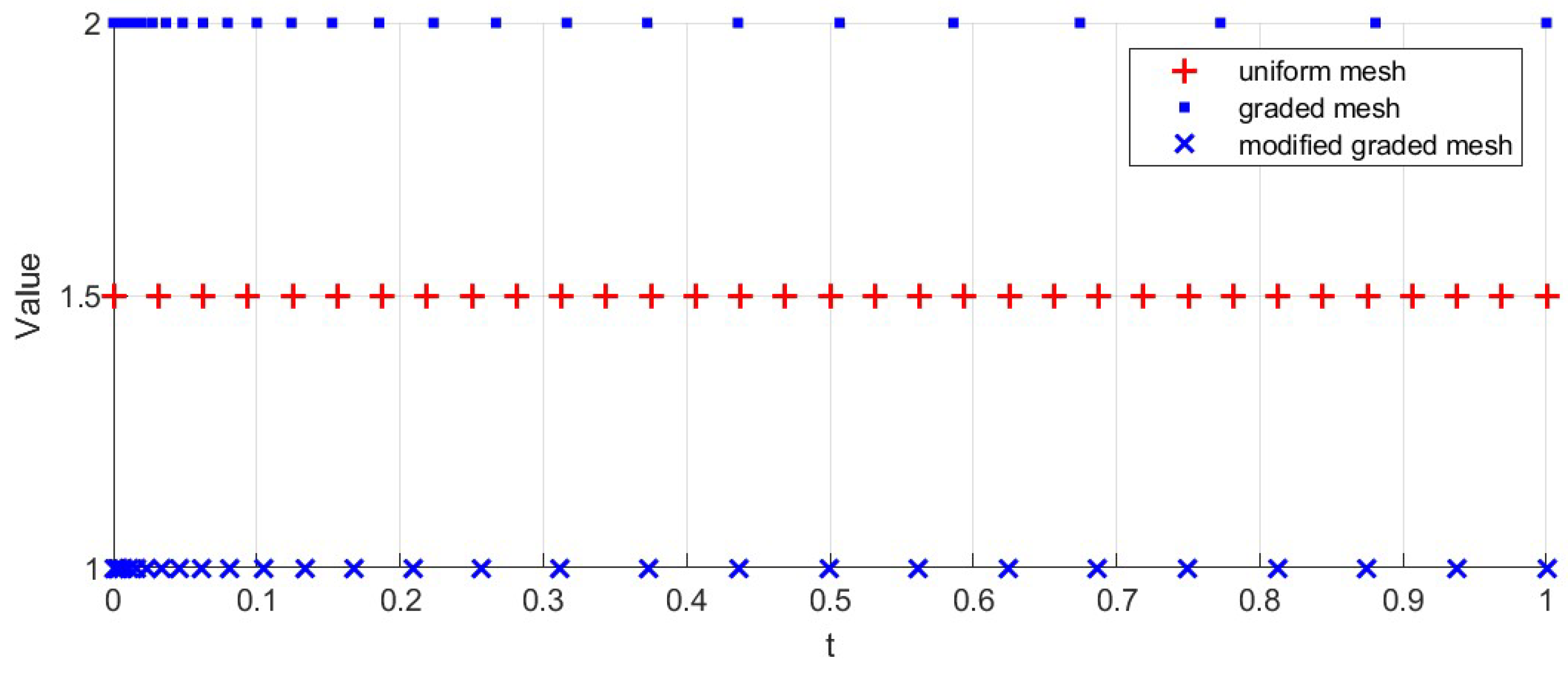
Let N be a positive integer. Let be the partition of . For the graded mesh, we choose , with . When , this mesh is the uniform mesh. For the modified mesh, we have for and for .
In
Figure 1, we choose
and
and plot the graded mesh with
and uniform mesh with
and the modified mesh with
, and
with
. The modified graded mesh is uneven from
to
, and uniform from
to
.
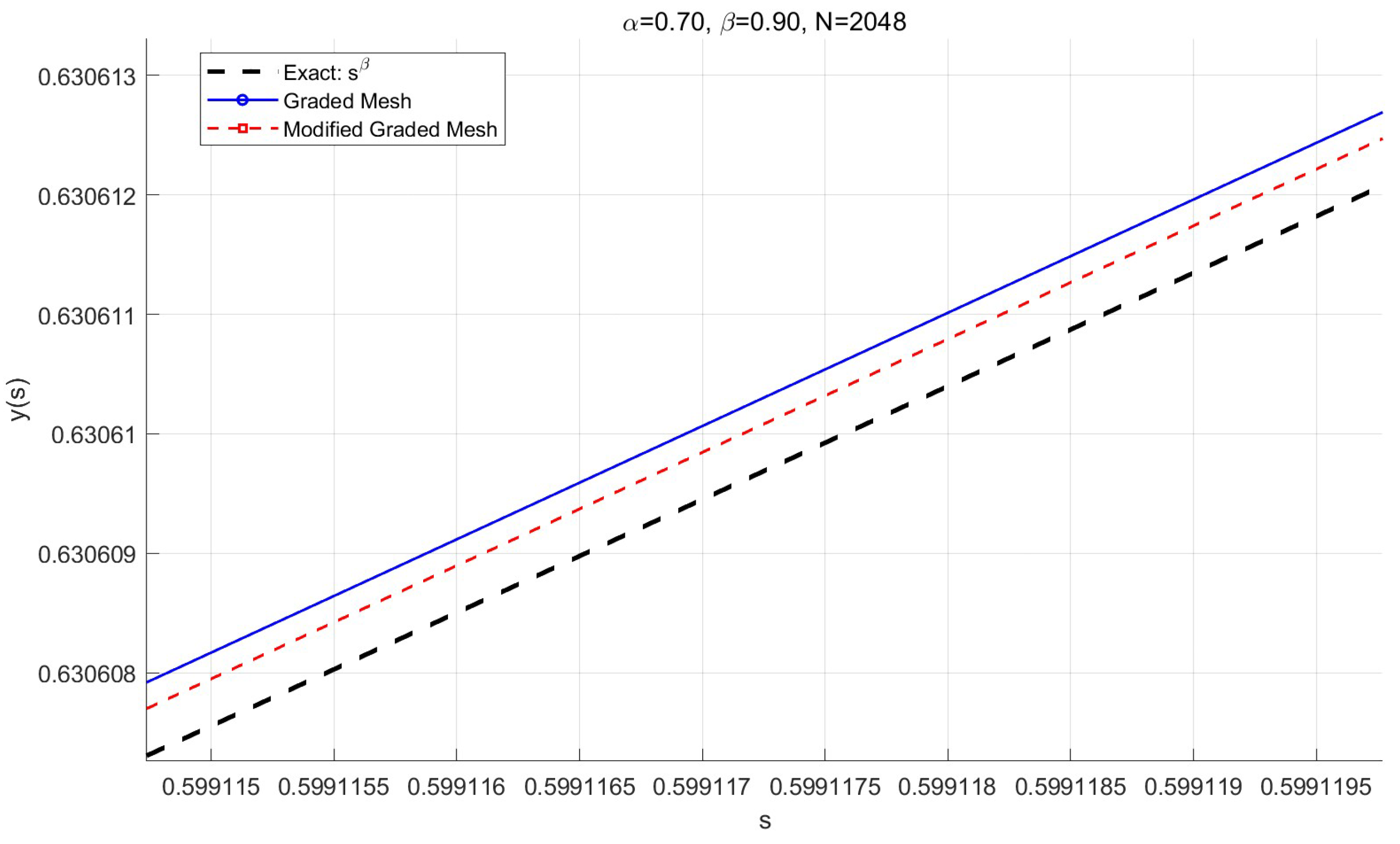
Example 1. Consider the following fractional differential equation,subject to the initial conditionwhere , , and , , and the exact solution is . Here, , which implies that the regularity of behaves as , which satisfies Assumption 1. Assume that
and
,
are the solutions of (
3) and (6), respectively. By Theorem 1 with
, we have the following error estimate (note that
):
When
,
,
, and
, we compare the exact solution and the numerical solutions for the graded mesh
and the modified graded mesh
.
Figure 2 shows the exact solution along with the numerical solutions obtained using the graded mesh and the modified graded mesh. From the figure, it is evident that both methods approximate the exact solution well, but the modified graded mesh achieves a smaller error compared to the graded mesh. In our numerical tests, we see that the errors from the modified graded mesh depend on the value of
K.
For the different values of
, we select the appropriate values of
r and set
, where
Then, we compute the maximum nodal error
(as previously defined) for various
N and determine the experimental order of convergence (EOC) using the following formula:
In
Table 1,
Table 2 and
Table 3, we set
and present the experimental order of convergence (EOC) alongside the maximum nodal errors for different values of
N. The numerical results indicate that the error of the modified mesh is smaller than that of the graded mesh.
Example 2. Consider the followingwhere and . The exact solution , where is the Mittag-Leffler function defined by Hence,
which suggests that the regularity of
behaves as
, where
.
According to Theorem 1, when
, the error estimate is given by
Table 4,
Table 5 and
Table 6 summarize the experimental order of convergence (EOC) along with the maximum nodal errors for different values of
N. The observed EOC closely aligns with the theoretical prediction:
.
Through the analysis and numerical experiments, it is clear that the modified graded mesh achieves smaller errors compared to the graded mesh. The traditional graded mesh, with its non-uniform step size, is effective at addressing the weak singularity near the initial time . However, as the time nodes move further away from the initial point, the sparsity of the mesh can lead to significant errors. In contrast, the modified graded mesh adopts the graded mesh near to better handle the singularity and transitions to a uniform mesh in later regions, effectively reducing the overall error.



{kind=link}
{kind=link}