
Interval Uncertainty Analysis for Wheel–Rail Contact Load Identification Based on First-Order Polynomial Chaos Expansion

Abstract
1. Introduction
2. The Calculation Formula for Load Decoupling Identification
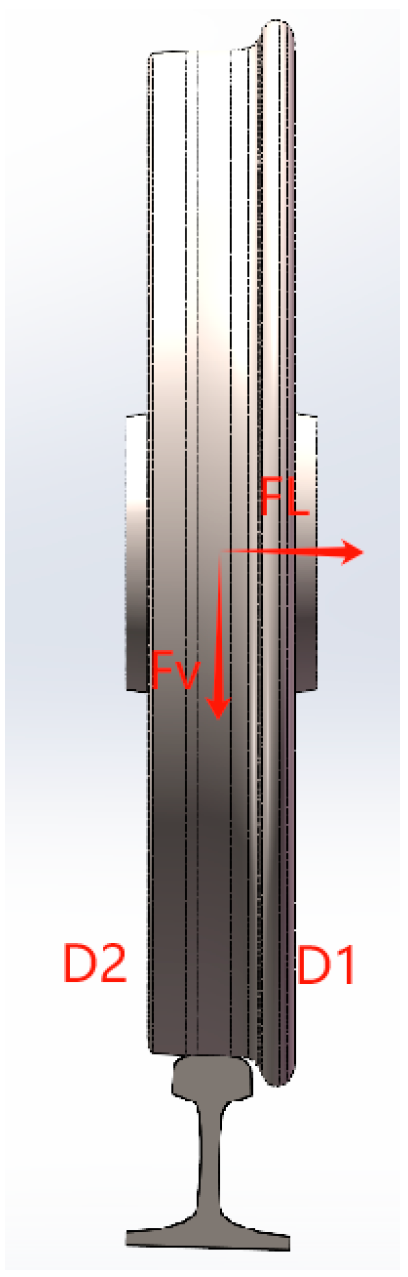
2.1. Analysis of Wheel–Rail Contact Forces
2.2. Decoupling Identification of Wheel–Rail Contact Loads
3. Interval Uncertainty Analysis of Wheel–Rail Loads
3.1. Interval Model
3.2. Polynomial Chaos Expansion-Based Interval Uncertainty Analysis Method
3.3. Interval Response Analysis
- Uncertain parameters were identified: There are many uncertain parameters for the decoupling identification of wheel–rail contact loads, such as Young’s modulus and strain.
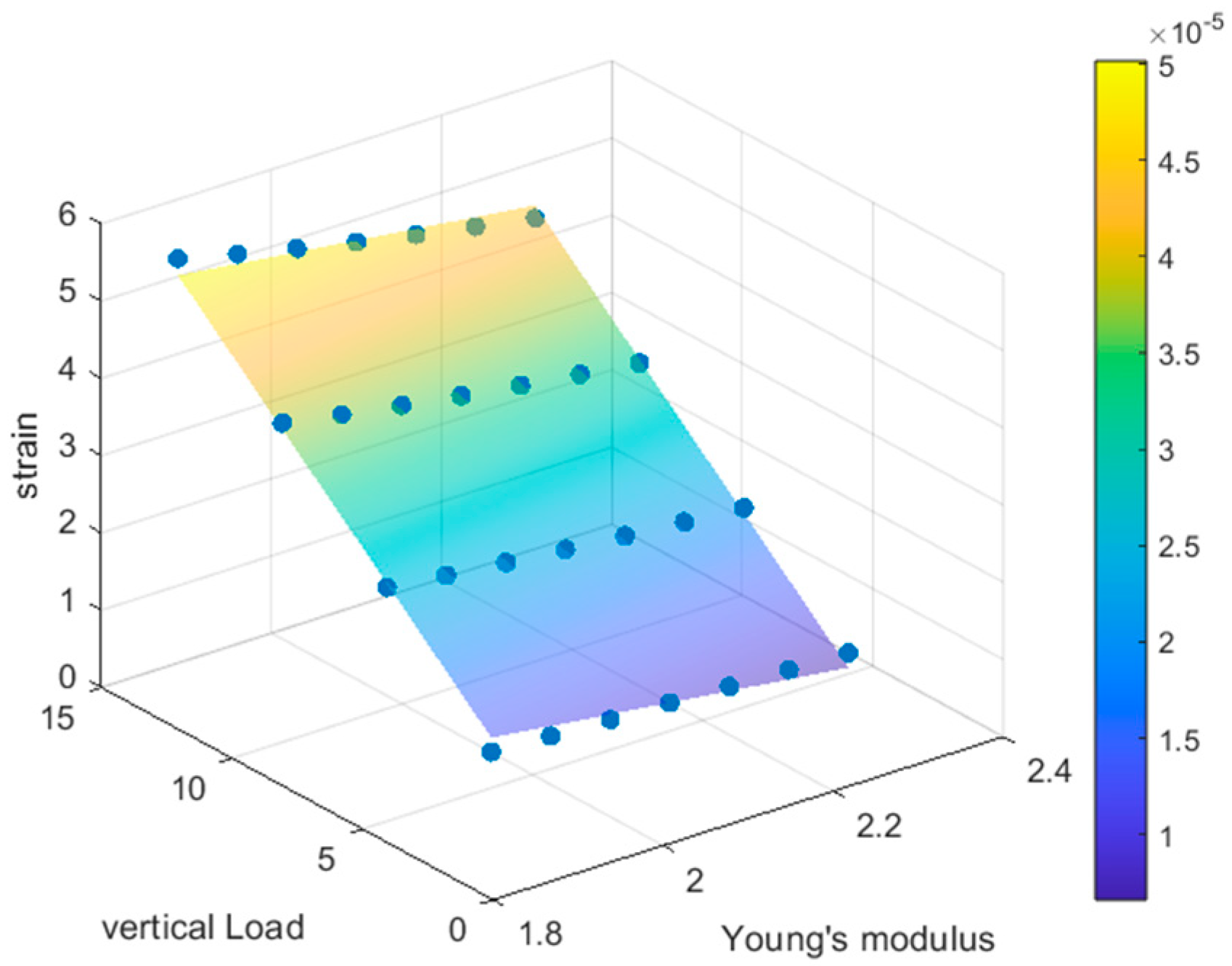
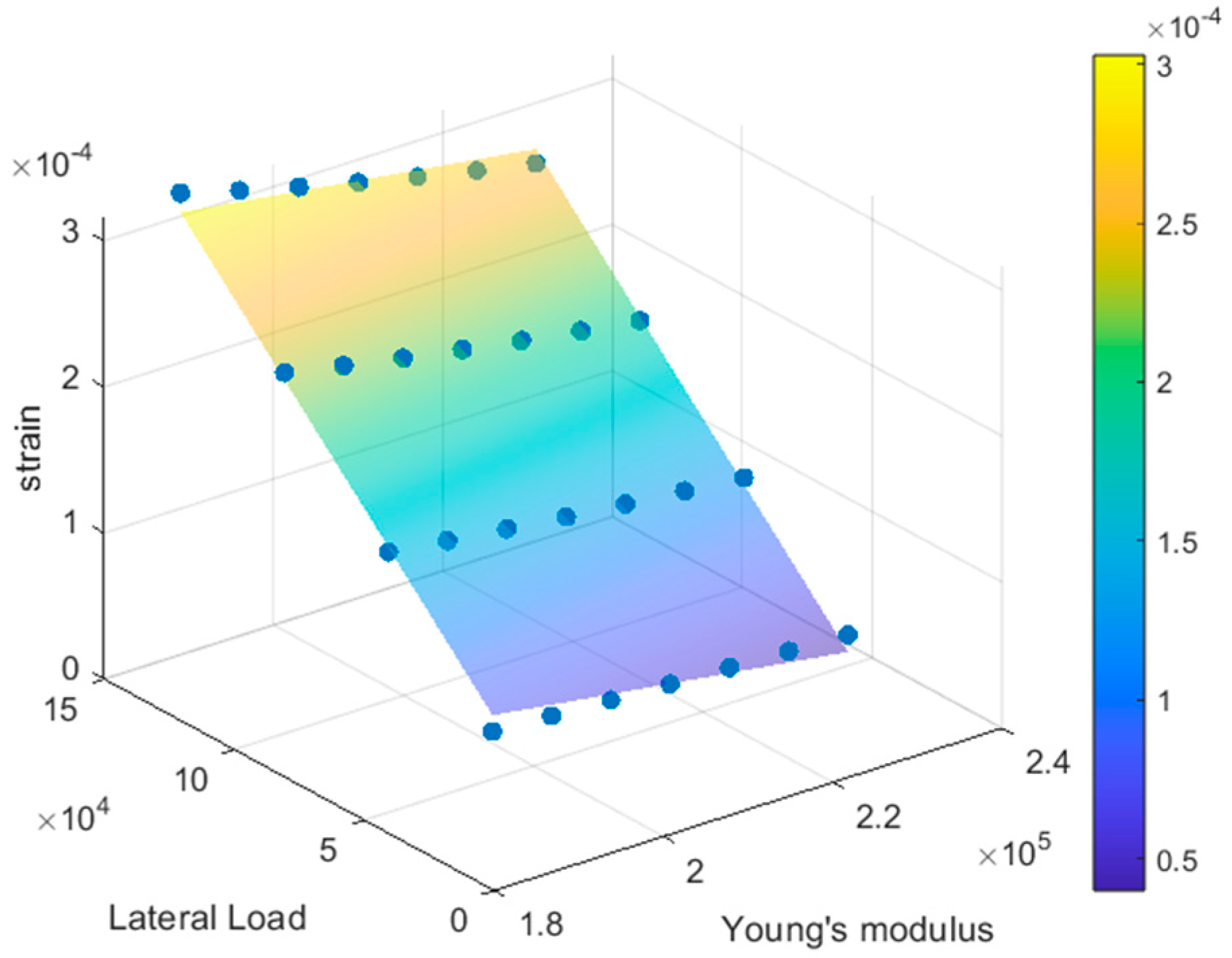
- The PCE algorithm was used to perform the calculation and obtain a large number of strain samples according to Equation (20).
- The approximate function was constructed based on Equations (15) and (16) to establish the relationship between strain and load, as well as Young’s modulus.
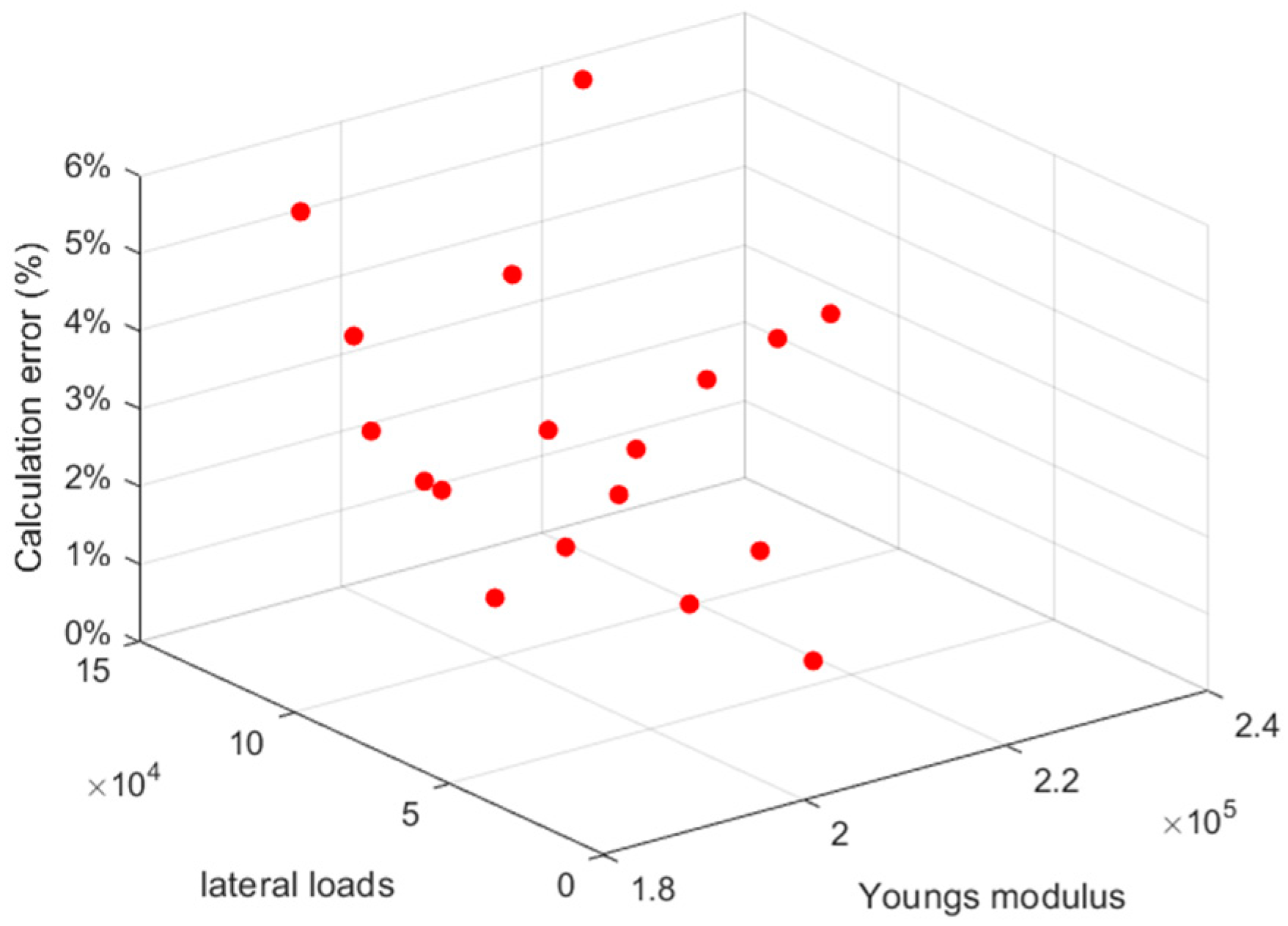
- The strain in the simulation model was compared with that obtained from the IFOPCE in step 3 to verify the accuracy of the IFOPCE.
- Equations (17) and (18) were used to construct an approximate function that determines the relationship between load and strain, as well as Young’s modulus.
- Strain and Young’s modulus were treated as interval variables, and the load response interval was derived by substituting them into the IFOPCE in step 5 for interval accuracy analysis.
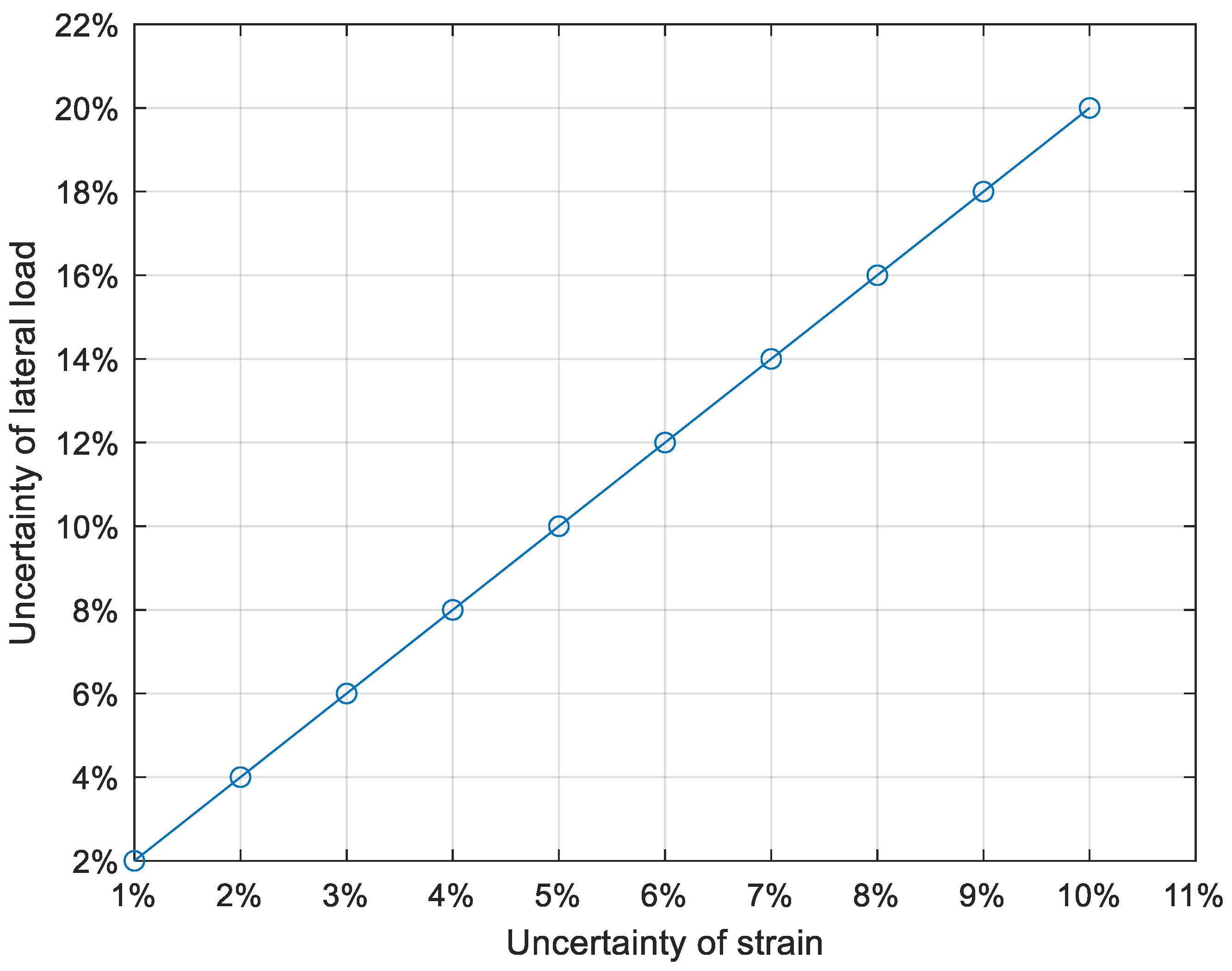
- The influence of parameter uncertainty was analyzed: The impact of parameter uncertainties on the uncertainty in load identification was analyzed through the examples.
4. Numerical Examples
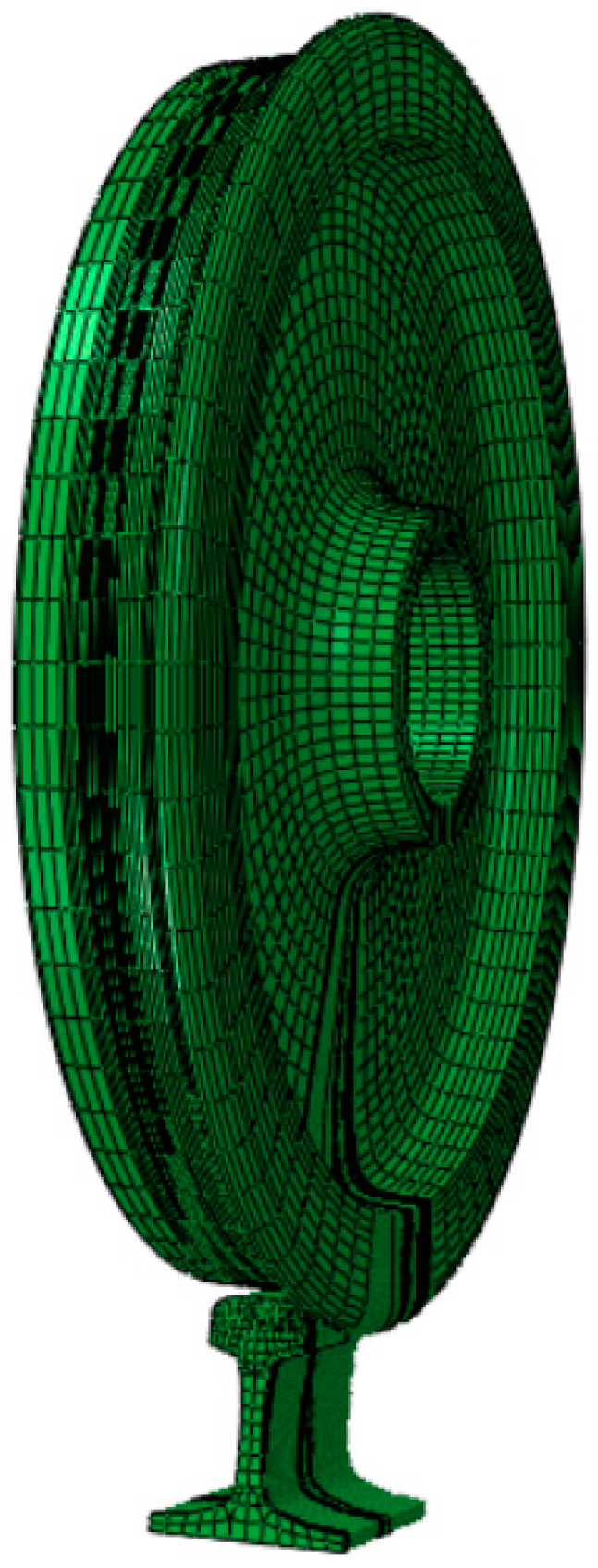
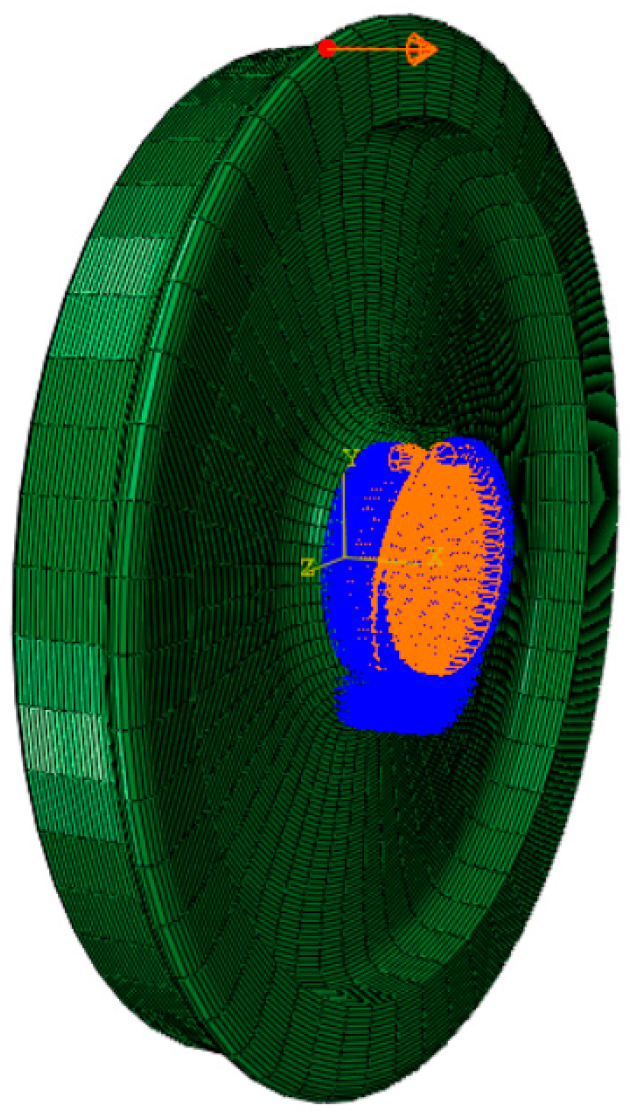
4.1. Finite Element Model
- Lateral load FL = 10 kN; vertical load FV = 0;
- Lateral load FL = 0; vertical load FV = 10 kN.
4.2. Accuracy Analysis of IFOPCE
4.3. Influence of Parameter Uncertainty on Load Identification Uncertainty
5. Conclusions
- The proposed IFOPCE method can effectively obtain the variational range of the vertical and lateral forces of wheel–rail contact, which means the first-order polynomial expansion is suitable for interval uncertainty analysis of wheel–rail contact systems.
- The uncertainty of parameters such as Young’s modulus and strain has a significant effect on the uncertainty of wheel–rail load identification. Therefore, it is necessary to consider parameter uncertainties for identifying wheel–rail contact loads.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| IFOPCE | Interval First-Order Polynomial Chaos Expansion method |
| PCE | Polynomial Chaos Expansion |
| LHS | Latin Hypercube Sampling |
References
- Smith, J.; Doe, A. Ground-based measurement techniques for rail vehicle load identification. J. Rail Transp. Eng. 2022, 15, 234–250. [Google Scholar]
- Brown, L.; Green, M. On-board monitoring systems for dynamic load assessment in rail vehicles. Veh. Syst. Dyn. 2023, 61, 567–585. [Google Scholar]
- Jónsson, J.G.; Svensson, E.; Christensen, J.T. Validation of strain gauges for rail stress measurement. IEEE/ASME Trans. Mechatron. 1997, 2, 180–187. [Google Scholar]
- Zhao, G.; Tian, Y.; Liu, T.; Zhao, G. Development of a continuous monitoring system for vertical forces on railway tracks. J. Sound Vib. 2000, 234, 819–836. [Google Scholar]
- Huang, H. Enhanced understanding of vertical force testing and development of a new detection system. J. Transp. Eng. 2005, 131, 411–420. [Google Scholar]
- Zhou, W.; Fang, C.; Han, T.; Li, G. A new track-side measurement method for high-precision positioning in railway track monitoring. J. Mod. Transp. 2010, 18, 177–183. [Google Scholar]
- Zhang, Y. Introduction of fiber Bragg grating sensing technology to improve the stability and reliability of measurement systems. Sens. Actuators A Phys. 2015, 227, 108–115. [Google Scholar]
- Matsumoto, A. Use of non-contact gap sensors to measure lateral forces, simplifying system installation and maintenance. JSME Int. J. Ser. C Mech. Syst. Mach. Elem. Manuf. 2008, 51, 747–753. [Google Scholar]
- Pedro, U.; Escalona, J. Comparative study of different measurement methods and exploration of laser as an alternative. Meas. Sci. Technol. 2014, 25, 125202. [Google Scholar]
- Ren, Y. Application of state space theory to make wheel-rail force calculation more efficient. Mech. Syst. Signal Process. 2017, 94, 256–270. [Google Scholar]
- Le Maître, O.P.; Knio, O.M. Spectral Methods for Uncertainty Quantification: With Applications to Computational Fluid Dynamics; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Ghanem, R.G.; Spanos, P.D. Stochastic Finite Elements: A Spectral Approach. J. Eng. Mech. 2021, 147, 04021001. [Google Scholar]
- Jakeman, J.D.; Eldred, M.S.; Sargsyan, K. Enhancing polynomial chaos expansions with adaptive sparse grids. SIAM J. Sci. Comput. 2020, 42, A1667–A1690. [Google Scholar]
- Liu, Y.; Ghanem, R.G. Data-driven polynomial chaos expansion for machine learning regression. J. Comput. Phys. 2020, 410, 109387. [Google Scholar]
- Chen, S.; Lian, H.; Yang, X. Interval static displacement analysis for structures with interval parameters. Int. J. Numer. Methods Eng. 2002, 53, 393–407. [Google Scholar] [CrossRef]
- Zhu, T.; Wang, X.; Wu, J.; Zhang, J.; Xiao, S.; Lu, L.; Yang, B.; Yang, G. Comprehensive identification of wheel-rail forces in railway vehicles based on time-domain and machine learning methods. Mech. Syst. Signal Process. 2024, 222, 111635. [Google Scholar] [CrossRef]
- Wiener, N. The homogeneous chaos. Am. J. Math. 1938, 60, 897–936. [Google Scholar] [CrossRef]
- Stein, M. Large sample properties of simulations using Latin hypercube sampling. Technometrics 1987, 29, 143–151. [Google Scholar] [CrossRef]
- Versaci, M.; Laganà, F.; Morabito, F.C.; Palumbo, A.; Angiulli, G. Adaptation of an Eddy Current Model for Characterizing Subsurface Defects in CFRP Plates Using FEM Analysis Based on Energy Functional. Mathematics 2024, 12, 2854. [Google Scholar] [CrossRef]
- Wen, T.; He, J.; Zhang, C.; He, J. wheel–rail contact force for a heavy-load train can be measured using a collaborative calibration algorithm. Information 2024, 15, 535. [Google Scholar] [CrossRef]
- Zhang, P.; Moraal, J.; Li, Z. Design, calibration and validation of a wheel-rail contact force measurement system in V-Track. Measurement 2021, 175, 109105. [Google Scholar] [CrossRef]
- Yang, C.; Tian, G.; Robinson, M.; Ibrahim, E.T. Wheel-rail force measurement based on wireless LC resonance sensing. IEEE Sens. J. 2023, 23, 17470–17479. [Google Scholar] [CrossRef]
- Bruni, S.; Meijaard, J.P.; Rill, G.; Schwab, A.L. State-of-the-art and challenges of railway and road vehicle dynamics with multibody dynamics approaches. Multibody Syst. Dyn. 2020, 49, 1–32. [Google Scholar] [CrossRef]
- Liu, Q.; Lei, X.; Rose, J.G.; Chen, H.-P.; Feng, Q.; Luo, X. Vertical wheel-rail force waveform identification using wavenumber domain method. Mech. Syst. Signal Process. 2021, 159, 107784. [Google Scholar] [CrossRef]
- Jiang, C.; Wang, S.; Wang, B.Q.; Zhang, J.H.; Zhao, T.Y. Probabilistic reliability assessment of power systems with wind power based on Latin Hypercube Sampling. Trans. China Electrotech. Soc. 2016, 31, 193–206. [Google Scholar]
- Kettler, M.; Zauchner, P.; Unterweger, H. Determination of wheel loads from runway cranes based on rail strain measurement. Eng. Struct. 2020, 213, 110546. [Google Scholar] [CrossRef]
- Sarikavak, Y.; Goda, K. Dynamic wheel/rail interactions for high-speed trains on a ballasted track. J. Mech. Sci. Technol. 2022, 36, 689–698. [Google Scholar] [CrossRef]
- Angiulli, G.; Calcagno, S.; De Carlo, D.; Laganá, F.; Versaci, M. Second-Order Parabolic Equation to Model, Analyze, and Forecast Thermal-Stress Distribution in Aircraft Plate Attack Wing–Fuselage. Mathematics 2020, 8, 6. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Uncertainty of Young’s Modulus | The Variation Range of Young’s Modulus | XV | Uncertainty of Load | |
|---|---|---|---|---|
| 1% | [207,900, 212,100] | 1.57 × 10−5 | [48,870, 50,676.2] | 3.6% |
| 2% | [205,800, 214,200] | 1.57 × 10−5 | [47,966.9, 51,579.3] | 7.3% |
| 3% | [203,700, 216,300] | 1.57 × 10−5 | [47,063.8, 52,482.3] | 10.9% |
| 4% | [201,600, 218,400] | 1.57 × 10−5 | [46,160.8, 53,385.4] | 14.5% |
| 5% | [199,500, 220,500] | 1.57 × 10−5 | [45,257.7, 54,288.5] | 18.1% |
| 6% | [197,400, 222,600] | 1.57 × 10−5 | [44,354.6, 55,191.6] | 21.8% |
| 7% | [195,300, 224,700] | 1.57 × 10−5 | [43,451.5, 56,094.7] | 25.4% |
| 8% | [193,200, 226,800] | 1.57 × 10−5 | [42,548.4, 56,997.8] | 29% |
| 9% | [191,100, 228,900] | 1.57 × 10−5 | [41,645.3, 57,900.9] | 32.7% |
| 10% | [189,000, 231,000] | 1.57 × 10−5 | [40,742.3, 58,803.9] | 36.3% |
| Uncertainty of Young’s Modulus | The Variation Range of Young’s Modulus | XL | Uncertainty of Load | |
|---|---|---|---|---|
| 1% | [207,900, 212,100] | 1.33 × 10−4 | [68,923.6, 70,729.6] | 2.6% |
| 2% | [205,800, 214,200] | 1.33 × 10−4 | [68,020.6, 71,632.6] | 5.2% |
| 3% | [203,700, 216,300] | 1.33 × 10−4 | [67,117.5, 72,535.6] | 7.8% |
| 4% | [201,600, 218,400] | 1.33 × 10−4 | [66,214.5, 73,438.6] | 10.3% |
| 5% | [199,500, 220,500] | 1.33 × 10−4 | [65,311.5, 74,341.6] | 12.9% |
| 6% | [197,400, 222,600] | 1.33 × 10−4 | [64,408.5, 75,244.6] | 15.5% |
| 7% | [195,300, 224,700] | 1.33 × 10−4 | [63,505.5, 76,147.7] | 18.1% |
| 8% | [193,200, 226,800] | 1.33 × 10−4 | [62,602.5, 77,050.7] | 20.7% |
| 9% | [191,100, 228,900] | 1.33 × 10−4 | [61,699.5, 77,953.7] | 23.3% |
| 10% | [189,000, 231,000] | 1.33 × 10−4 | [60,796.5, 78,856.7] | 25.9% |
| Uncertainty of Strain | The Variation Range of Strain | E | Uncertainty of Load | |
|---|---|---|---|---|
| 1% | [1.5543 × 10−5, 1.5857 × 10−5] | 210,000 | [49,275.3, 50,270.9] | 2% |
| 2% | [1.5386 × 10−5, 1.6014 × 10−5] | 210,000 | [48,777.5, 50,768.7] | 4% |
| 3% | [1.5229 × 10−5, 1.6171 × 10−5] | 210,000 | [48,279.6, 51,266.5] | 6% |
| 4% | [1.5072 × 10−5, 1.6328 × 10−5] | 210,000 | [47,781.8, 51,764.4] | 8% |
| 5% | [1.4915 × 10−5, 1.6485 × 10−5] | 210,000 | [47,284.0, 52,262.2] | 10% |
| 6% | [1.4758 × 10−5, 1.6642 × 10−5] | 210,000 | [46,786.2, 52,760.0] | 12% |
| 7% | [1.4601 × 10−5, 1.6799 × 10−5] | 210,000 | [46,288.4, 53,257.8] | 14% |
| 8% | [1.4444 × 10−5, 1.6956 × 10−5] | 210,000 | [45,790.6, 53,755.6] | 16% |
| 9% | [1.4287 × 10−5, 1.7113 × 10−5] | 210,000 | [45,292.8, 54,253.4] | 18% |
| 10% | [1.413 × 10−5, 1.727 × 10−5] | 210,000 | [44,794.9, 54,751.3] | 20% |
| Uncertainty of Strain | The Variation Range of Strain | E | Uncertainty of Load | |
|---|---|---|---|---|
| 1% | [1.3167 × 10−4, 1.3433 × 10−4] | 210,000 | [69,128.3, 70,524.8] | 2% |
| 2% | [1.3034 × 10−4, 1.3566 × 10−4] | 210,000 | [68,430.0, 71,223.1] | 4% |
| 3% | [1.2901 × 10−4, 1.3699 × 10−4] | 210,000 | [67,731.8, 71,921.4] | 6% |
| 4% | [1.2768 × 10−4, 1.3832 × 10−4] | 210,000 | [67,033.5, 72,619.6] | 8% |
| 5% | [1.2635 × 10−4, 1.3965 × 10−4] | 210,000 | [66,335.2, 73,317.9] | 10% |
| 6% | [1.2502 × 10−4, 1.4098 × 10−4] | 210,000 | [65,637.0, 74,016.2] | 12% |
| 7% | [1.2369 × 10−4, 1.4231 × 10−4] | 210,000 | [64,938.7, 74,714.4] | 14% |
| 8% | [1.2236 × 10−4, 1.4364 × 10−4] | 210,000 | [64,240.4, 75,412.7] | 16% |
| 9% | [1.2103 × 10−4, 1.4497 × 10−4] | 210,000 | [63,542.2, 76,111.0] | 18% |
| 10% | [1.197 × 10−4, 1.463 × 10−4] | 210,000 | [62,843.9, 74,809.2] | 20% |
| Uncertainty of Variables | The Variation Range of Strain | The Variation Range of Young’s Modulus | Uncertainty of Load | |
|---|---|---|---|---|
| 1% | [1.5543 × 10−5, 1.5857 × 10−5] | [207,900, 212,100] | [49,275.3, 50,270.9] | 5.6% |
| 2% | [1.5386 × 10−5, 1.6014 × 10−5] | [205,800, 214,200] | [48,777.5, 50,768.7] | 11.3% |
| 3% | [1.5229 × 10−5, 1.6171 × 10−5] | [203,700, 216,300] | [48,279.6, 51,266.5] | 16.9% |
| 4% | [1.5072 × 10−5, 1.6328 × 10−5] | [201,600, 218,400] | [47,781.8, 51,764.4] | 22.5% |
| 5% | [1.4915 × 10−5, 1.6485 × 10−5] | [199,500, 220,500] | [47,284.0, 52,262.2] | 28.1% |
| 6% | [1.4758 × 10−5, 1.6642 × 10−5] | [197,400, 222,600] | [46,786.2, 52,760.0] | 33.8% |
| 7% | [1.4601 × 10−5, 1.6799 × 10−5] | [195,300, 224,700] | [46,288.4, 53,257.8] | 39.4% |
| 8% | [1.4444 × 10−5, 1.6956 × 10−5] | [193,200, 226,800] | [45,790.6, 53,755.6] | 45.0% |
| 9% | [1.4287 × 10−5, 1.7113 × 10−5] | [191,100, 228,900] | [45,292.8, 54,253.4] | 50.7% |
| 10% | [1.413 × 10−5, 1.727 × 10−5] | [189,000, 231,000] | [44,794.9, 54,751.3] | 56.3% |
| Uncertainty of Variables | The Variation Range of Strain | The Variation Range of Young’s Modulus | Uncertainty of Load | |
|---|---|---|---|---|
| 1% | [1.3167 × 10−4, 1.3433 × 10−4] | [207,900, 212,100] | [68,225.3, 71,427.9] | 4.6% |
| 2% | [1.3034 × 10−4, 1.3566 × 10−4] | [205,800, 214,200] | [66,624.0, 73,029.1] | 9.2% |
| 3% | [1.2901 × 10−4, 1.3699 × 10−4] | [203,700, 216,300] | [65,022.7, 74,630.4] | 13.8% |
| 4% | [1.2768 × 10−4, 1.3832 × 10−4] | [201,600, 218,400] | [63,421.5, 76,231.7] | 18.3% |
| 5% | [1.2635 × 10−4, 1.3965 × 10−4] | [199,500, 220,500] | [61,820.2, 77,833.0] | 22.9% |
| 6% | [1.2502 × 10−4, 1.4098 × 10−4] | [197,400, 222,600] | [60,218.9, 79,434.2] | 27.5% |
| 7% | [1.2369 × 10−4, 1.4231 × 10−4] | [195,300, 224,700] | [58,617.6, 81,035.5] | 32.1% |
| 8% | [1.2236 × 10−4, 1.4364 × 10−4] | [193,200, 226,800] | [57,016.4, 82,636.8] | 36.7% |
| 9% | [1.2103 × 10−4, 1.4497 × 10−4] | [191,100, 228,900] | [55,415.1, 84,238.1] | 41.3% |
| 10% | [1.197 × 10−4, 1.463 × 10−4] | [189,000, 231,000] | [53,813.8, 85,839.3] | 45.9% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, S.; Xiao, H.; Cao, L. Interval Uncertainty Analysis for Wheel–Rail Contact Load Identification Based on First-Order Polynomial Chaos Expansion. Mathematics 2025, 13, 656. https://doi.org/10.3390/math13040656
Yin S, Xiao H, Cao L. Interval Uncertainty Analysis for Wheel–Rail Contact Load Identification Based on First-Order Polynomial Chaos Expansion. Mathematics. 2025; 13(4):656. https://doi.org/10.3390/math13040656
Chicago/Turabian StyleYin, Shengwen, Haotian Xiao, and Lei Cao. 2025. "Interval Uncertainty Analysis for Wheel–Rail Contact Load Identification Based on First-Order Polynomial Chaos Expansion" Mathematics 13, no. 4: 656. https://doi.org/10.3390/math13040656
APA StyleYin, S., Xiao, H., & Cao, L. (2025). Interval Uncertainty Analysis for Wheel–Rail Contact Load Identification Based on First-Order Polynomial Chaos Expansion. Mathematics, 13(4), 656. https://doi.org/10.3390/math13040656