1. Introduction
Singular systems (also referred to as implicit or descriptor or combined differential and algebraic systems) are often more appropriate for modeling real-world systems such as those found in mechanics, biology, economics, and chemistry, etc. [
1,
2,
3,
4]. Recent academic studies on singular systems have prominently emphasized investigations into stability analysis, fuzzy control methodologies, quantized regulation techniques, adaptive control strategies, and related domains [
5,
6,
7]. Stochastic singular systems are widely used in power systems, financial markets, biomedicine, and robot control, etc. For example, in power systems, the system can be used to model the dynamic behavior of the grid, taking into account the effects of random fluctuations such as load variations and renewable energy intermittency, and thus improve the stability and reliability of the grid. In financial markets, stochastic singular systems can be used to model asset price fluctuations and help in risk management. In the field of biomedicine, it can be used to model the dynamic behavior of biological systems and assist in disease diagnosis and treatment. In robot control, it can be used to model the dynamic behavior of a robot and improve its adaptability in a complex environment. These applications show the reliability and importance of stochastic singular systems and provide a broad prospect for subsequent research. Furthermore, researchers have integrated Markov chains into the discrete-time singular systems, adding complexity to the systems while yielding significant findings [
8,
9,
10]. With further research, the stochastic theory has made considerable advancements in the modeling of mechanical engineering, circuit dynamics, and economic systems and has been extended to singular systems. Notably, stochastic singular systems offer superior expressiveness concerning the structural features inherent in dynamic systems when compared to conventional singular systems [
11,
12,
13]. Incorporating stochastic disturbances within a system provides a means to emulate the uncertainties and fluctuations characteristic of real-world contexts. These uncertainties may emanate from a myriad of factors, including environmental volatility, external interferences, or inherent stochasticity within the system dynamics. By integrating stochastic disturbances, a more accurate evaluation of the system’s resilience, equilibrium, and capacity to accommodate diverse environmental stimuli can be achieved. Hence, the examination of stochastic singular systems driven by discrete-time Markov chains bears substantial pragmatic implications.
Reference [
14] pioneered the LQOC problem, significantly influencing modern control theory. On the one hand, the LQOC problem provides a framework for optimizing controller design by minimizing a quadratic cost function, thereby achieving a balance between system stability, performance, and robustness. On the other hand, the LQOC problem studied in this paper is to adjust the weights of system states and inputs in the cost function according to practical needs, allowing for flexible optimization of system performance metrics such as response speed, stability, and energy consumption. Hence, the LQOC problem is currently being applied in various dynamic systems, including mechanical, electrical, and control systems, with notable applications in engineering, robotics, aerospace, and other fields [
15,
16]. Simultaneously, the Riccati equation stands as a pivotal tool in addressing the LQOC problem in the discrete-time case. By solving the Riccati equation, the linear feedback optimal controller in the discrete time case was obtained, and the optimal control of the studied system was finally realized [
17,
18]. Recently, the study of the LQOC problem has attracted the attention of many scholars. Reference [
19] centered on the LQOC problem applied to discrete-time Markovian jumping systems (DTMJSs), with a particular emphasis on constraining control actions within a suitable subspace. Reference [
20] concerned singular DTMJSs in infinite and finite horizons to address the LQOC problem with indefinite parameters. References [
21,
22] analyzed the LQOC problem in fractional-order discrete systems. Recent works in this area have shown that despite weight matrices
Q and
R having certain uncertainties in the stochastic system, the associated stochastic LQOC problem possibly still be well-posed. In discrete-time LQOC problems, positive definiteness, which was necessary for the control weighting matrix, will not be a mandatory condition, and it may even be negative in the presence of uncertainty factors within the system [
23,
24]. The above article fails to take into account the influence of stochastic disturbances on the system in practical applications. Thus, this paper investigated the subject where the LQOC problem of the discrete-time stochastic singular systems was affected by stochastic disturbances and discrete-time Markov chains.
Based on the above discussion, we investigated discrete-time stochastic singular systems with stochastic disturbances and discrete-time Markov chains. Compared with existing studies in this field, our findings highlight the following motivations and advantages.
- •
In this paper, both the state and control weighting matrices could be introduced by indefinite ones in the quadratic cost function; that is, it allows negative eigenvalues for the weighting matrix. Secondly, an equivalent transformation from the indefinite LQOC problem of stochastic singular systems to normal stochastic systems is obtained in this paper, with the condition for equivalent transformation expressed in terms of the initial coefficient matrix of singular stochastic systems, which is straightforward to verify and imposes relatively few constraints.
- •
This paper introduces stochastic disturbances to simulate the actual impact of a stochastic environment on the operation of real systems while also considering the output feedback control to enhance the robustness of the closed-loop system. Additionally, for the purpose of ensuring the stochastic admissibility of the singular stochastic systems of the system under study, this paper constructs a Lyapunov function with relatively low conservatism and utilizes MATLAB’s LMI toolbox to design the controller gains.
The structure of the paper is outlined as follows. In
Section 2, the transformation equivalently converts the indefinite LQOC problem of stochastic singular systems driven by discrete-time Markov chains into an indefinite LQOC problem for regular systems through a sequence of equivalent transformations.
Section 3 establishes necessary and sufficient conditions for the solvability of the indefinite LQOC problem. Specifically, it proves that the corresponding optimal control strategy and optimal cost can be obtained, ensuring the regularity and causality of the resulting closed-loop system. Additionally, criteria are provided to guarantee the definiteness of the transformed LQOC problem for stochastic singular systems, and it is shown that the semi-positive definite solution to the GMJARE is unique. Furthermore, the acquisition of the optimal control gain matrix and optimal cost values is detailed, demonstrating that the resulting closed-loop system is stochastically admissible with the output feedback control. At the end of
Section 3, the specific form of the optimal control gain matrix is derived using the rigorous LMI method. Finally, in
Section 4, a numerical example with four Markovian switching modes is presented to validate the main results.
2. Foundation and Problem Formulation
Consider a class of discrete-time singular systems subjected to stochastic disturbances and driven by discrete-time Markov chains:
where
,
and
. The matrix
is singular and
.
represents a Markov chain in discrete-time case to take values in the positive-integer set
and its transition probabilities are
, which means the probability of
being
j under
, with
and
(
). All the system parameter matrices can be abbreviated as
,
,
,
,
,
for
. Assume that
is unrelated to the initial state
.
is a one-dimensional white noise in a given complete probability space
, where
and
are independent with each other.
Problem 1. For the LQOC problem of system (1), it defines the quadratic cost function aswhere stands for the mathematical expectation. It is worth mentioning that the weight matrix for the system states and control inputs is only symmetric for , , with , while is symmetric. Note that the weight matrix
in LQOC Problem 1 is merely symmetric and thus may appear inappropriate at this stage. To solve LQOC Problem 1, it is necessary to obtain the controller
in a
-measurable space that minimizes (
2) over the set of admissible controls of (
1). The optimal value function is defined as
Now, we will introduce the following definitions and lemma needed for our analysis in this paper.
Definition 1 ([
2,
25])
. Consider a class of systems of the form as .- (i)
If for any , the regularity will be satisfied.
- (ii)
If it is regular and for any , causality will be satisfied.
- (iii)
If the consider system is regular, causal and stochastically stable, stochastic admissibility will be satisfied.
Definition 2 ([
26])
. For the compatible initial , ifthe LQOC Problem 1
is referred to be well-posed. Definition 3 ([
26])
. The LQOC Problem 1
is called attainable if there has an admissible control that minimizes (2) for any initial state . Assumption 1. For system (1), suppose thatAnd it holds that . Remark 1. The rank condition in Assumption 1 ensures that the singular system preserves regularity and causality in each mode. This is a fundamental requirement in the design of control systems. Second, this rank condition also implies the controllability and observability of the system in each mode. For singular systems, these properties are defined through the rank of the matrix. The existence of Assumption 1 ensures that the system has enough degrees of freedom in each mode to achieve the control objective.
In the following, the form of LQOC Problem 1 after a series of transformations will be given. First, assume that the singular matrix
E satisfies the following singular value decomposition (SVD):
where
and
.
and
are the corresponding orthogonal matrices. Consequently, indicate
where
,
,
,
,
,
,
,
,
,
and
. Thus system (
1) can be viewed as restrictively equivalent to system
Meanwhile, the corresponding equivalent transformation of (
2) can also be given as
where
and
,
,
,
. According to [
20], Assumption 1 is synonymous with a full-row rank matrix
. Suppose that there is a nonsingular matrix
satisfying
with appropriate dimensions for any
. It is important at this point,
and
are dependent on the Markovian switching modes
i and
j, thus we will introduce a non-singular matrix
M that is uncorrelated with the Markovian switching mode to replace
in the follow-up study.
Remark 2. The purpose of the proposed Equation (10) is to transform the singular system into an ordinary system by matrix transformation. This transformation is mathematically sound because it provides a way to simplify the solution of the problem while preserving the dynamics of the system. This is crucial for designing effective controllers. By choosing an appropriate matrix , a complex singular system can be transformed into a more tractable ordinary system. Moreover, the matrix in (10) is nonsingular, which means that the transformation is invertible. This ensures that the transformed system is mathematically equivalent to the original system and no information is lost. Moreover, it not only improves the computational efficiency, but also reduces the difficulty of implementing complex control algorithms. Proposition 1. For Assumption 1, there exists a nonsingular matrix M, it holds thatif and only iffor , where is nonsingular. Proof. From (
4) and (
5), it follows that
Taking into account
,
and
are linearly dependent can be further obtained. Therefore, there is a matrix
with a nonsingular property such that
. From (
9), one has
. Without loss of generality, we can choose
,
and
. The proof is completed. □
To proceed, denote
with
where
,
,
,
,
,
,
,
. Then using the following nonsingular linear transformation
system (
7) can be transformed into
Let
,
, and
, then (
15) can be converted to
From the second formula of (
16) and Proposition 1, we can obtain
. By substituting this formula into (
14), one has
Under (
17), the function (
8) can be expressed as
where
Problem 2. For the LQOC problem of system (16), the corresponding quadratic cost function is defined by (18). According to the above analysis and transformation, LQOC Problem 1 and LQOC Problem 2 are equivalent, as shown in (
17). Therefore, in
Section 3, LQOC Problem 1 will be solved using LQOC Problem 2. Subsequently, some lemmas will be presented to prove the main results of
Section 3.
Lemma 1 ([
27])
. Allow matrices , and with suitable dimensions. And the quadratic form is , where x and u are random variables with appropriate dimensions defined in a probability space . The following conditions are considered to be equivalent.- (i)
There is for any random variable x.
- (ii)
There is for any x and matrix , where matrix is symmetric.
- (iii)
and .
- (iv)
and .
- (v)
There is for the existing symmetric matrix T.
In addition, there exists such that (ii) is satisfied if any of the above conditions holds. Furthermore, it holds for any T in (v). Eventually, the optimal control and the optimal value can be obtained for any random variable x.
3. Main Result
From above, we know that LQOC Problem 1 and LQOC Problem 2 can be studied equivalently. Therefore, in this section, we directly investigate the solvability of LQOC Problem 2, which is the system’s indefinite LQOC problem. It can be obtained by Lemma 1 that the LQOC Problem 2 is clearly well-posed when all the matrices
should be symmetric and satisfy the following LMI condition
where
,
,
and
.
Immediately following, we will obtain the optimal control and cost value for LQOC Problem 2 by some consequent results.
Theorem 1. When there exists for , LQOC Problem 2
is solvable if and only if the following GMJARE can be solved,Furthermore, the optimal control is defined byFinally, the corresponding optimal cost value is Proof. In the first part, the proof of necessity holds. Assuming that LQOC Problem 2 can be solved, we will demonstrate that when (
21) and (
22) hold, there exists a symmetric matrix
satisfying (
20). By further induction assumptions, we firstly show that (20)–(22) holds when
. From this, the following middle-range issue is introduced by
and
Notice that the discrete-time Markov chain
and the disturbance signal
are independent with each other. Combining with system (
16) for
, (
24) could be transformed to
where
Later, it follows from the conclusion of Lemma 1 that there exists suitable
such that
where
Furthermore, the corresponding optimal control expression can be obtained by
In the case of
, when (
26)–(
28) hold, it is convenient to obtain that (
20)–(
22) hold. Subsequently, we suppose that (
20) has a solution
with
such that (
21) and (
22) holding as well for
. Therefore, from system (
16) and the Bellman equation, we can obtain that
Similarly, there exists
satisfying
such that
and its optimal control is
From (
29), (
31) and (
32), the conclusion that can be drawn is that
with
then, (
20)–(
22) hold when
. To sum up, we can conclude that (
20)–(
22) is satisfied when
.
In the second part, we prove that the sufficiency holds. Thus, we need to display that when GMJARE (
20) can be solved, then (
21) and (
22) are obtainable. We get
It is evident that
from (
19) and the Schur Complement lemma. Then applying (
16), GMJARE (
20) and the Moore–Penrose pseudoinverse definition with
, we can obtain that
When
to
N, the two sides of the above formula are processed by the corresponding summation
and this indicates that
Since
, it holds
with
. Subsequently, the value of optimal cost can be obtained
Therefore, is always less than 0. That concludes the proof of Theorem 1. □
Theorem 1 proves that the optimal controller is solvable and its cost function will also reach the optimal value under the determined optimal controller. The following Theorem 2 will be further solved for the specific form of the optimal controller via LMI.
With Assumption 1 and (
16), the LQOC Problem 2 is solvable if there is a matrix
satisfying GMJARE (
20), while the unique solution of the optimal control expression is described by
Secondly, the corresponding cost value of LQOC Problem 2 is given by
Eventually, it will have the following closed-loop system equation
Building on previous work, we now translate the indefinite LQOC Problem 1 into a infinite-horizon definite LQOC Problem 3.
Problem 3. Under system (16), the equivalent transformation is considered bywhere , , , and the quadratic cost function associated is given by The LQOC Problem 3 is to find a -measurable controller , to minimize (44) subject to (43) and guarantee that . It can be found that the LQOC Problem 1 is equivalent to the LQOC Problem 3, if the LQOC Problem 3 has a solution, then the LQOC Problem 1 solvable as well.
Notice that
and
are easily derived by the original coefficient matrices of system (
1) and weight matrices of cost function (
2), while
, then
, which shows the success of the definite LQOC Problem 3 in infinite horizon based on [
28].
Next, we consider the LQOC Problem 3, then define the following GMJARE
where
and
.
On the basis of
and
, we find that the existing solution
for GMJARE (
45) could directly judge the solvability of the LQOC Problem 3. We may reasonably come to the conclusion.
Proposition 2. With Assumption 1, (12), and , if GMJARE (45) has a solution , then the LQOC Problem 3
is solvable. Moreover, the unique optimal control iswith its optimal cost value function asHence, it can achieve the stochastic stability for the closed-loop system In system (
1), it is assumed that the state information is unmeasurable, while the input and output data remain measurable. The output feedback control law
is given by
Just like in (
46), the objective is to attain a numerical approximate solution with
. Interestingly, a relationship can be observed between the optimal state feedback control (
46) and the static output feedback control (
49). Thus, to achieve the minimum value of the cost function (
44), the minimal cost (
47) can be attained via the following optimal output-feedback control law.
where the matrix
is a suitable optimal control gain for the system (
1).
Theorem 2. Under Theorem 1, the optimal closed-loop system (43) is stochastically admissible with the the control law (49), if there exist matrices , and , symmetric matrices , and , positive-definite symmetric matrices , and such thatwhere , , , and Proof. Choose a stochastic Lyapunov function
with
. Then, the differential of
is obtained as follows:
In what follows, system (
43) will be further discussed. It is from (
53) that
where
Let
. Introduce a symmetric matrix
and
, then we can get
By substituting (
43) and (
49) into (
55), we can utilize the matrix inequality method and obtain that
where
We know that
, so it could be deduced that
. From the Schur Complement lemma,
is equivalent to (
51) in Theorem 2.
So taking iteration from 0 to
∞ and taking expectation of (
56), it is obtained under the zero initial condition that
Noting that
and inequality (
57), which completes the proof. □
4. Simulations Example
Three-dimensional discrete-time stochastic singular systems (16) driven by a one-dimensional stochastic disturbances
and a discrete-time Makrov chain with four switching modes are chosen by
with the three-dimensional state
and
. And the jumping transfer matrix is given by
First, we calculated the SVD of the corresponding system parameters and transformed the system matrix using the SVD results, and constructed the LMI conditions based on the transformed system matrix. Subsequently, the solution of GMJARE is obtained by solving the LMI using MATLAB. The optimal control gain matrix is calculated from the solution of GMJARE and the optimal control law is formed. Through the calculation of MATLAB LMI toolbox, the feasibility solution of our designed LMI in Theorem 2 can be obtained, where the weighting matrices in Problem 3 are given by
and the obtained parameters are as follows
In this simulation example, an indefinite weight matrix is allowed to be introduced into the quadratic cost function, i.e., the weight matrix can have negative eigenvalues. This is significantly innovative compared with the traditional linear quadratic optimal control problem. Traditional methods usually require the weight matrix to be positive definite or positive semi-definite. However, through a series of equivalent transformations and theoretical derivations, we successfully solve the challenge brought by the indefinite weight matrix, which provides a broader space for flexible optimization of system performance. Then the LQOC problem
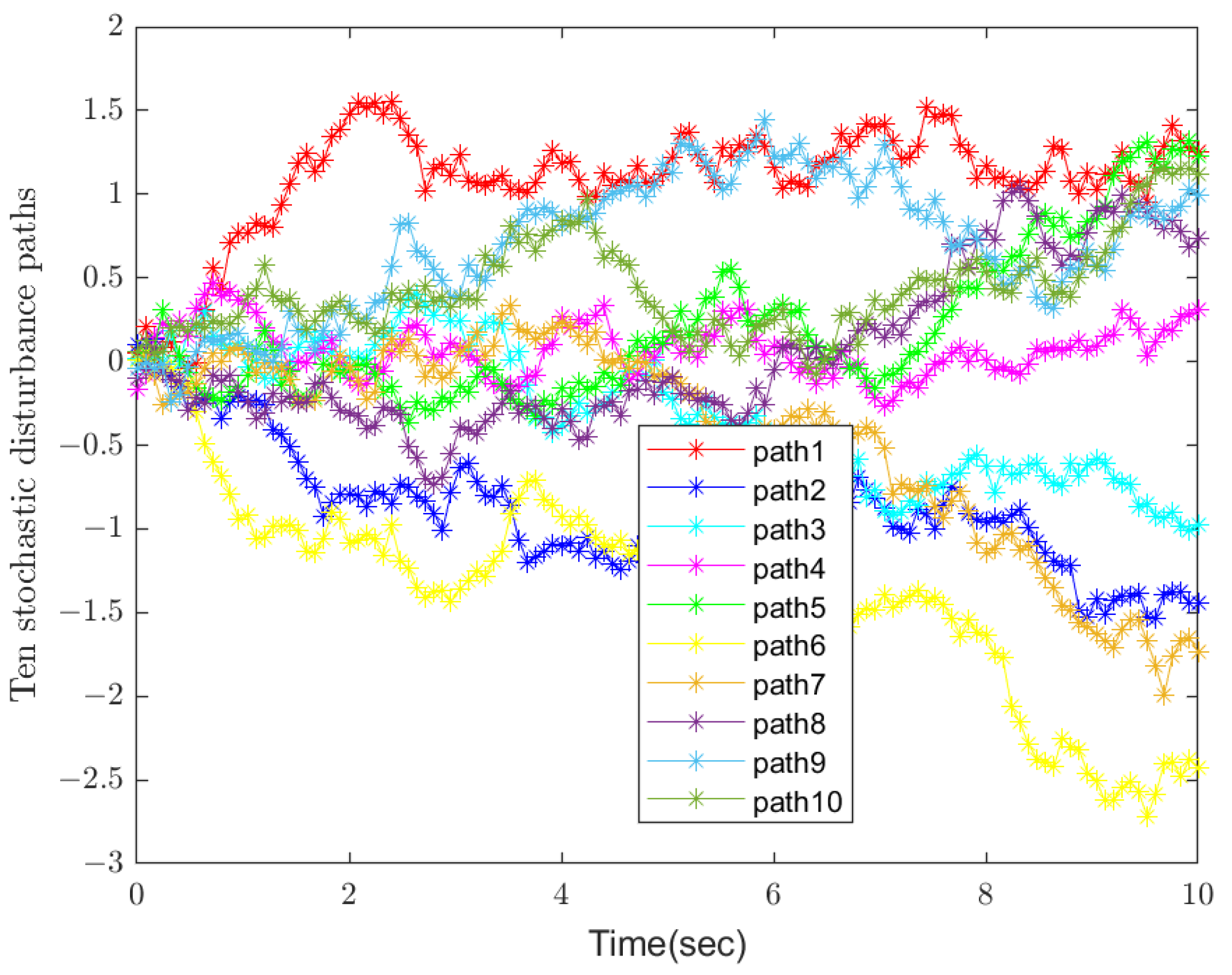
in total could be indefinite. Thus the conditions of Theorem 2 are satisfied. We consider both random disturbance and discrete-time Markov chain in the modeling. The simulation results under the influence of 10 independent sets of disturbances and their average values are also presented. This comprehensive consideration enables the system to better simulate the uncertainty and dynamic changes in the real world and improves the robustness and adaptability of the system. In the existing research, few works can deal with these two complex factors at the same time, so it is significantly innovative in this respect. The initial condition is given by
. The simulation results are given in
Figure 1,
Figure 2,
Figure 3,
Figure 4,
Figure 5 and
Figure 6.
Figure 1 and
Figure 2 show ten paths of stochastic disturbances and switching modes, respectively. It is easy to see that all the ten stochastic disturbances are independent and completely random, making the results more convincing and closer to real-world scenarios.
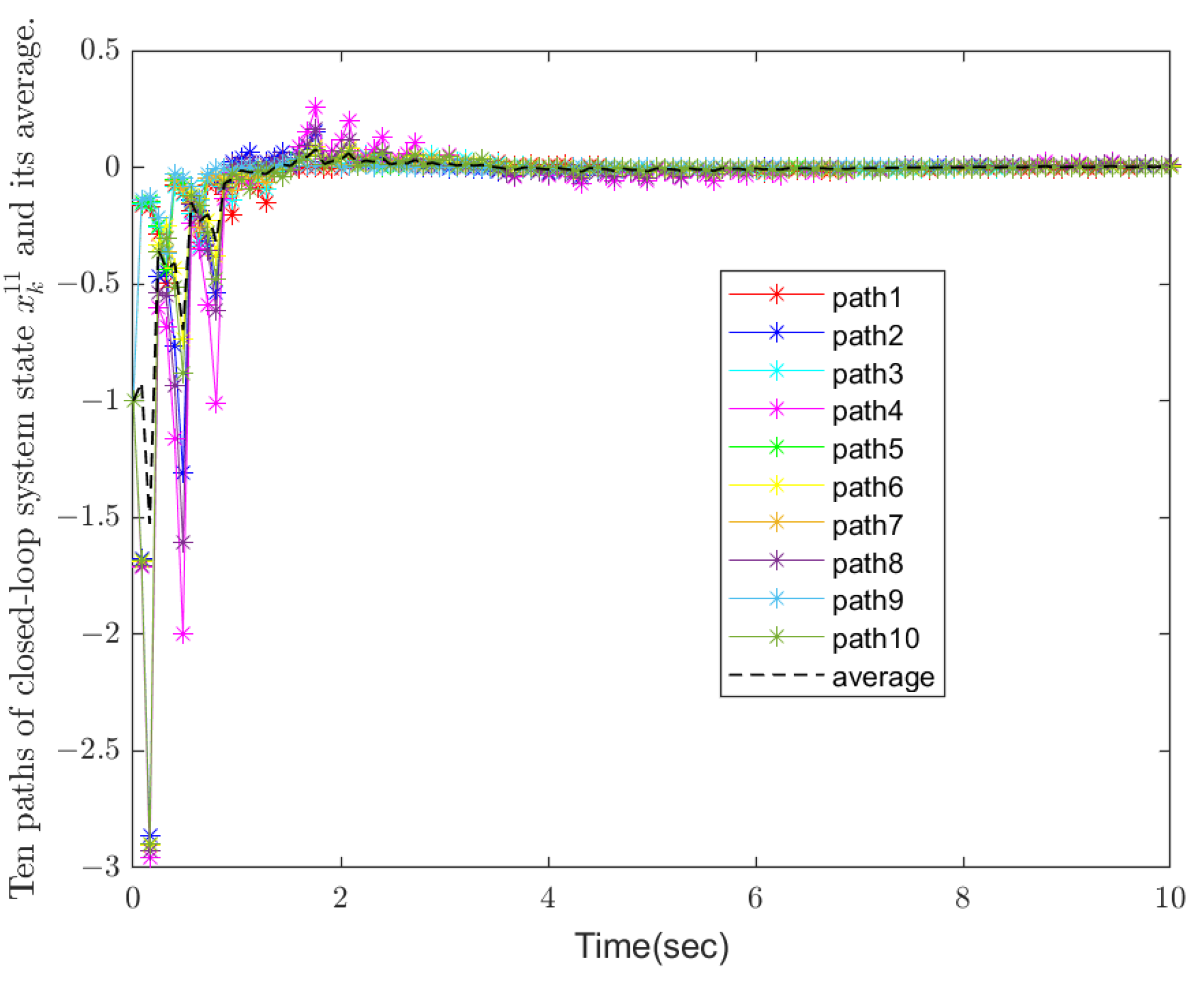
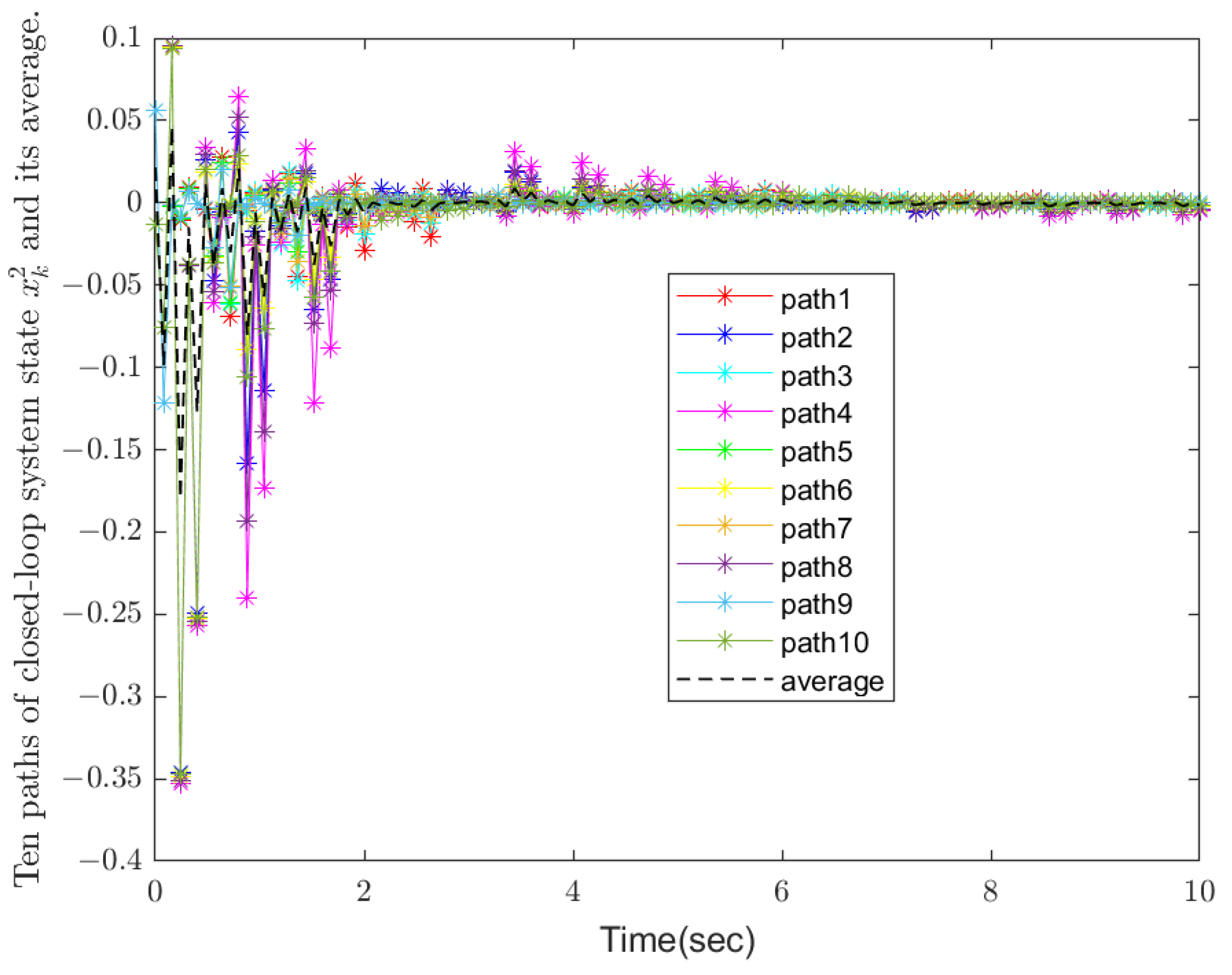
Figure 3,
Figure 4 and
Figure 5 demonstrate the state trajectories
,
, and
of the closed-loop systems along ten stochastic disturbances, while their average trajectories under ten samples are also shown, respectively. It indicates that each system state gradually smooths and tends to stabilize within a finite time. Then,
Figure 6 shows control signals
, and it demonstrates that the designed controller is effective for the system. Finally, the optimal output feedback controller has been calculated by Theorem 2. Obviously, the figure shows that each of the 10 stochastic singular systems can reach stability and hold within
under the influence of 10 independently generated stochastic disturbances, and the experimental simulation shows that the method has good results.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}