
Suppressing Nonlinear Resonant Vibrations via NINDF Control in Beam Structures

 ,
,  ,
,
Abstract
1. Introduction
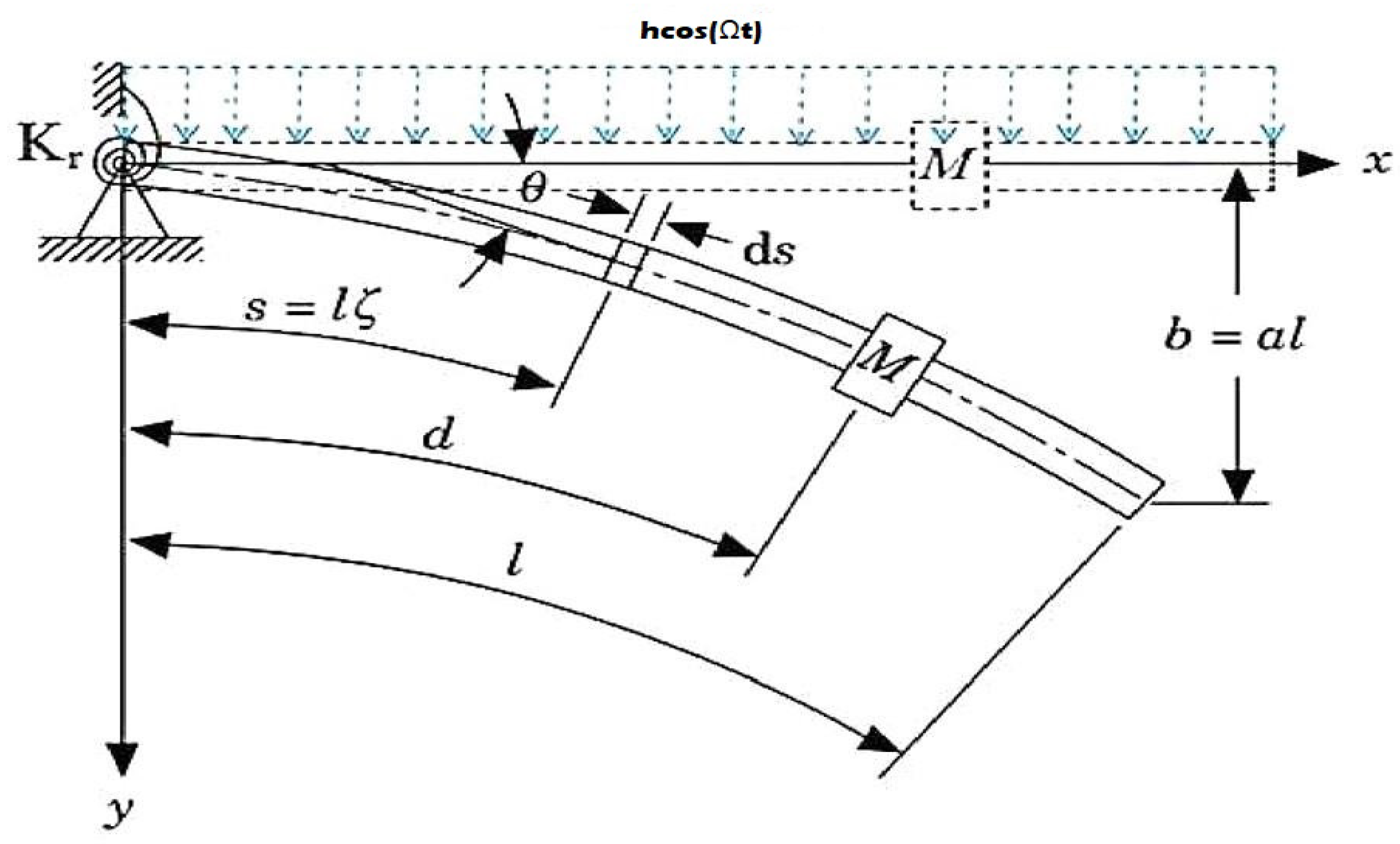
Measured Model
2. Mathematical Modeling
2.1. Uncontrolled System Dynamics
2.2. System Dynamics with NINDF Control
3. Analytical Investigation
3.1. Perturbation Procedure
- (i)
- Primary resonance case (PR): .
- (ii)
- Internal resonance case (IR): .
- (iii)
- Simultaneous resonance (PR) and (IR) resonance: . (The worst case.)
3.2. Periodic Solutions
3.3. Fixed-Point Solution
3.4. Gaining Stability Through System Linearisation
4. Results
4.1. Performance of the System Both with and Without NINDF Control
4.2. Outcomes and Conversation
5. Discussion
6. Comparison
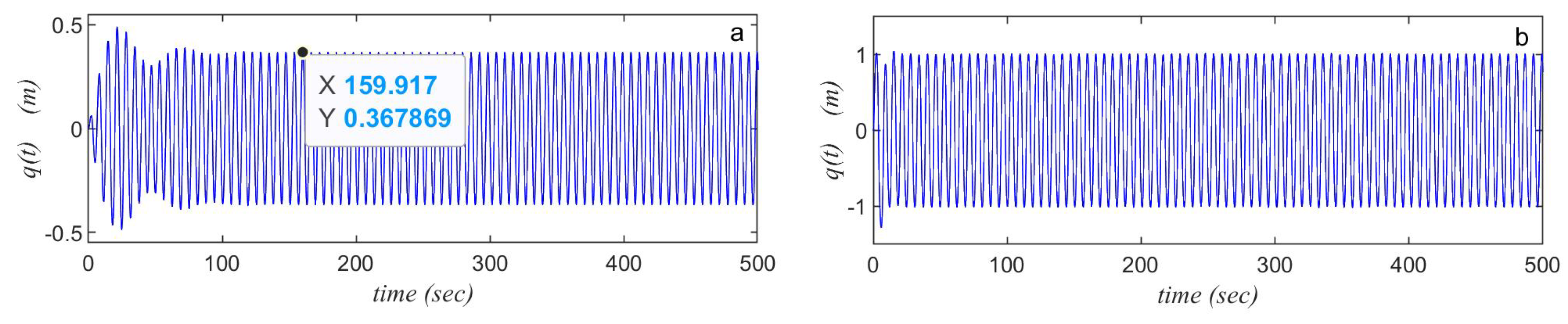
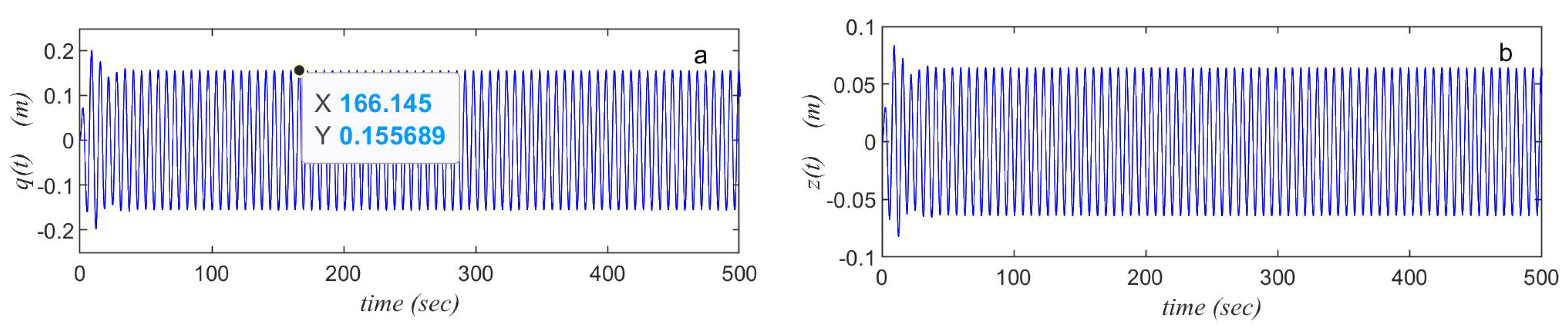
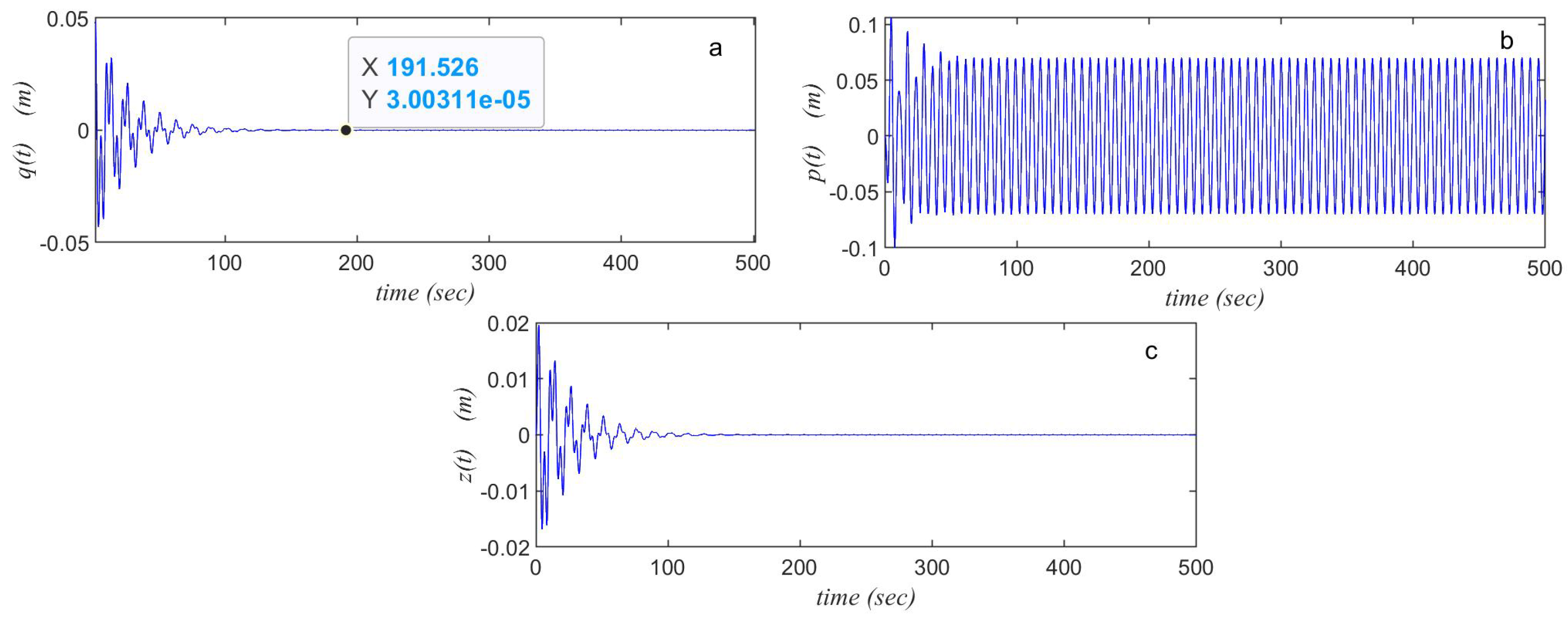
6.1. Comparison Between Time History Before and After Controllers
6.2. Comparison Between Perturbation Solution and Numerical Simulation
6.3. Comparison with Previous Work
7. Conclusions
- In nonlinear structures, high-amplitude atmospheres are successfully reduced via the Nonlinear Integral Negative Derivative Feedback (NINDF) controller.
- Among the worst circumstances of vibrating reverberation are the PR and IR instances and .
- Following the use of the NINDF reaction supervisor linked to its rate deprived of the regulator, the exciting structure’s breadth decreased by almost 99. 99%.
- The NINDF reaction supervisor’s efficiency, represented by , influences roughly 12,000, demonstrating how well it supervises the structure’s operation.
- With an increase in the peripheral excitation force, h, the measured structure’s performance or comeback intensifies.
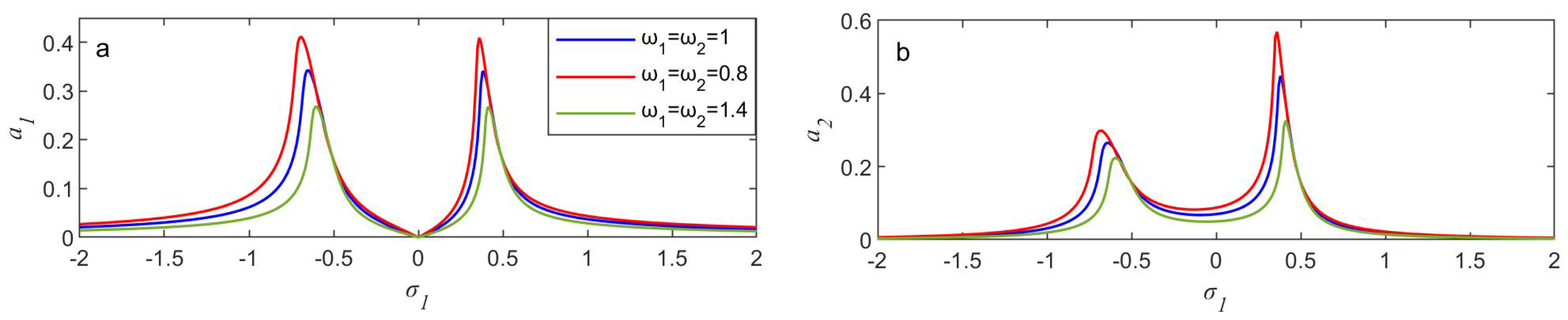
- As the natural frequency increased, the focal structure’s response dropped.
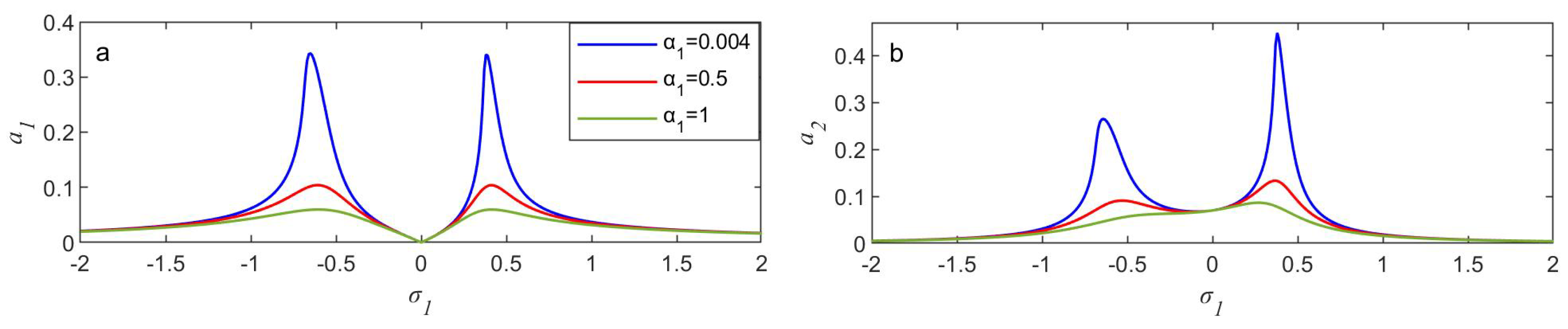
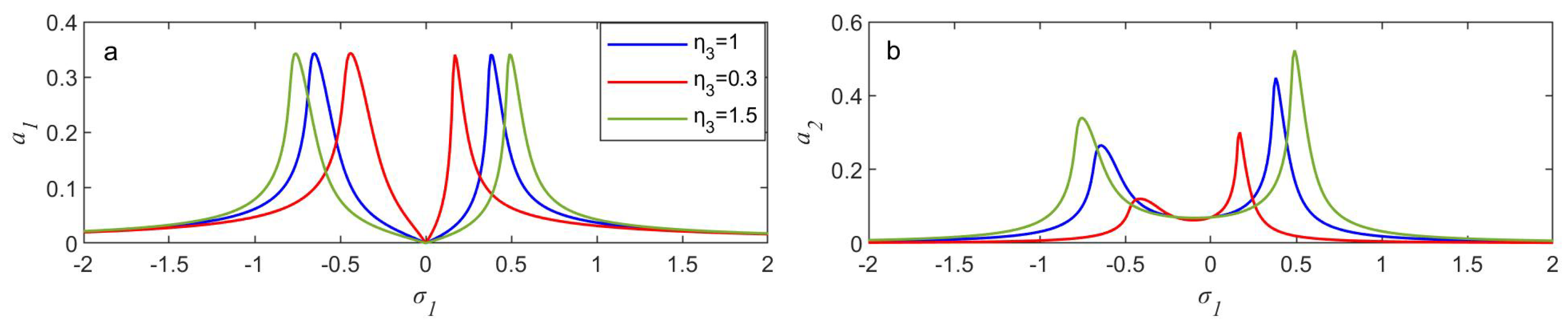
- Raising the NINDF parameter causes the curves to tilt to the right, which can enhance the NINDF controller’s effectiveness, especially when it comes to reducing high-amplitude vibrations in the nonlinear system.
- The measured system’s amplitude diminishes exceedingly gradually for the NINDF parameter.
- The vibrating cantilever beam’s smallest amplitudes occur when .
- When the gains of the control signals () are increased, the NINDF controller’s reduction in vibration frequency bandwidth expands.
- The approximate and numerical solutions are in satisfactory agreement.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| MTSPM | Multiple Time Scale Perturbation Method |
| NINDF | The Nonlinear Integral Negative Derivative Feedback |
| PR | Primary Resonance |
| IR | Internal Resonance |
| FREs | Frequency Response Equations |
Appendix A
References
- Fryba, L. Vibration of Solids and Structures Under Moving Loads; Academia: Prague, Czech Republic, 1972. [Google Scholar]
- Kevin, M.; Dowell, E. Nonlinear responses of inextensible cantilever and free–free beams undergoing large deflections. J. Appl. Mech. 2018, 85, 051008. [Google Scholar]
- Dwivedy, S.K.; Kar, R.C. Nonlinear dynamics of a cantilever beam carrying an attached mass with 1: 3: 9 internal resonances. Nonlinear Dyn. 2003, 31, 49–72. [Google Scholar] [CrossRef]
- Kar, R.C.; Dwivedy, S.K. Non-linear dynamics of a slender beam carrying a lumped mass with principal parametric and internal resonances. Int. J. Non-Linear Mech. 1999, 34, 515–529. [Google Scholar] [CrossRef]
- Hamdan, M.N.; Shabaneh, N.H. On the large amplitude free vibrations of a restrained uniform beam carrying an intermediate lumped mass. J. Sound Vib. 1997, 199, 711–736. [Google Scholar] [CrossRef]
- Hamdan, M.N.; Dado, M.H.F. Large amplitude free vibrations of a uniform cantilever beam carrying an intermediate lumped mass and rotary inertia. J. Sound Vib. 1997, 206, 151–168. [Google Scholar] [CrossRef]
- Al-Qaisia, A.A.; Hamdan, M.N. Bifurcations of approximate harmonic balance solutions and transition to chaos in an oscillator with inertial and elastic symmetric nonlinearities. J. Sound Vib. 2001, 244, 453–479. [Google Scholar] [CrossRef]
- Al-Qaisia, A.A.; Hamdan, M.N. Bifurcations and chaos of an immersed cantilever beam in a fluid and carrying an intermediate mass. J. Sound Vib. 2002, 253, 859–888. [Google Scholar] [CrossRef]
- Gen, G.; Xie, N. An approach dealing with inertia nonlinearity of a cantilever model subject to lateral basal Gaussian white noise excitation. Chaos Solitons Fractals 2020, 131, 109469. [Google Scholar]
- Qian, Y.H.; Lai, S.K.; Zhang, W.; Xiang, Y. Study on asymptotic analytical solutions using HAM for strongly nonlinear vibrations of a restrained cantilever beam with an intermediate lumped mass. Numer. Algorithms 2011, 58, 293–314. [Google Scholar] [CrossRef]
- Yang, X.-J.; Gao, F.; Srivastava, H.M. A new computational approach for solving nonlinear local fractional PDEs. J. Comput. Appl. Math. 2018, 339, 285–296. [Google Scholar] [CrossRef]
- Ahmad, E.-A. A modification to the conformable fractional calculus with some applications. Alex. Eng. J. 2020, 59, 2239–2249. [Google Scholar]
- El-Nabulsi, R.A. On a new fractional uncertainty relation and its implications in quantum mechanics and molecular physics. Proc. R Soc. A 2020, 476, 20190729. [Google Scholar] [CrossRef]
- Chen, S.-S. Application of the differential transformation method to the free vibrations of strongly non-linear oscillators. Nonlinear Anal. Real World Appl. 2009, 10, 881–888. [Google Scholar] [CrossRef]
- Moatimid, M.; Amer, T.S.; Ellabban, Y.Y. A novel methodology for a time-delayed controller to prevent nonlinear system oscillations. J. Low Freq. Noise Vib. Act. Control 2024, 43, 525–542. [Google Scholar] [CrossRef]
- Abadi. Nonlinear Dynamics of Self-Excitation in Autoparametric Systems; Faculteit Wiskunde en Informatica, Universiteit Utrecht: Surabaya, Indonesia, 2003. [Google Scholar]
- El-Badawy, A.A.; El-Deen, T.N.N. Quadratic nonlinear control of a self-excited oscillator. J. Vib. Control 2007, 13, 403–414. [Google Scholar] [CrossRef]
- Li, J.; Li, X.; Hua, H. Active nonlinear saturation-based control for suppressing the free vibration of a self-excited plant. Commun. Nonlinear Sci. Numer. Simul. 2010, 15, 1071–1079. [Google Scholar]
- Warminski, J.; Cartmell, M.P.; Mitura, A.; Bochenski, M. Active Vibration Control of a Nonlinear Beam with Self-and External Excitations. Shock Vib. 2013, 20, 1033–1047. [Google Scholar] [CrossRef]
- Akash, S.; Mondal, J.; Chatterjee, S. Controlling self-excited vibration using positive position feedback with time-delay. J. Braz. Soc. Mech. Sci. Eng. 2020, 42, 1–10. [Google Scholar]
- Saeed, N.A.; Awrejcewicz, J.; Alkashif, M.A.; Mohamed, M.S. 2D and 3D visualization for the static bifurcations and nonlinear oscillations of a self-excited system with time-delayed controller. Symmetry 2022, 14, 621. [Google Scholar] [CrossRef]
- Joy, M.; Chatterjee, S. Controlling self-excited vibration of a nonlinear beam by nonlinear resonant velocity feedback with time-delay. Int. J. Non-Linear Mech. 2021, 131, 103684. [Google Scholar]
- Akash, S.; Mondal, J.; Chatterjee, S. Controlling self-excited vibration using acceleration feedback with time-delay. Int. J. Dyn. Control 2019, 7, 1521–1531. [Google Scholar]
- Amer, Y.A.; El-Sayed, A.T.; Abd El-Salam, M.N. Non-linear saturation controller to reduce the vibrations of vertical conveyor subjected to external excitation. Asian Res. J. Math. 2018, 11, 1–26. [Google Scholar] [CrossRef]
- Amer, Y.A.; Abd EL-Salam, M.N. Negative Derivative Feedback Controller for Repressing Vibrations of the Hybrid Rayleigh-Van der Pol-Duffing Oscillator. Nonlinear Phenom. Complex Syst. 2022, 25, 217–228. [Google Scholar] [CrossRef]
- Nayfeh, A.H. Perturbation Methods; John Wiley and Sons: New York, NY, USA, 1973. [Google Scholar]
- Bauomy, H.S.; El-Sayed, A.T. Mixed controller (IRC+ NSC) involved in the harmonic vibration response cantilever beam model. Meas. Control 2020, 53, 1954–1967. [Google Scholar] [CrossRef]
- Amer, Y.A.; EL-Sayed, A.T.; Abd EL-Salam, M.N. A suitable active control for suppression the vibrations of a cantilever beam. Sound. Vib. 2022, 56, 89–104. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Description |
|---|---|
| Displacement, velocity, and acceleration of the preliminary vein of the system, respectively | |
| Displacement, velocity, and acceleration of the controller, respectively | |
| Dimensionless movement and velocity of the controller | |
| Dimensionless control signal gain | |
| Dimensionless feedback signal gain | |
| Dimensionless linear parameter of the controller | |
| System and control damping coefficients, respectively | |
| The inherent order and patterns in system and control | |
| h | Strength and rate of external forces acting on the system |
| Nonlinear coefficients of the focal structure | |
| External excitation frequency | |
| Detuning parameter | |
| Slight variation parameter |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Amer, Y.A.; Hussein, R.K.; Abu Alrub, S.; Elgazzar, A.S.; Salman, T.M.; Mousa, F.; El-Salam, M.N.A. Suppressing Nonlinear Resonant Vibrations via NINDF Control in Beam Structures. Mathematics 2025, 13, 2137. https://doi.org/10.3390/math13132137
Amer YA, Hussein RK, Abu Alrub S, Elgazzar AS, Salman TM, Mousa F, El-Salam MNA. Suppressing Nonlinear Resonant Vibrations via NINDF Control in Beam Structures. Mathematics. 2025; 13(13):2137. https://doi.org/10.3390/math13132137
Chicago/Turabian StyleAmer, Yasser A., Rageh K. Hussein, Sharif Abu Alrub, Ahmed S. Elgazzar, Tarek M. Salman, Fatma Mousa, and M. N. Abd El-Salam. 2025. "Suppressing Nonlinear Resonant Vibrations via NINDF Control in Beam Structures" Mathematics 13, no. 13: 2137. https://doi.org/10.3390/math13132137
APA StyleAmer, Y. A., Hussein, R. K., Abu Alrub, S., Elgazzar, A. S., Salman, T. M., Mousa, F., & El-Salam, M. N. A. (2025). Suppressing Nonlinear Resonant Vibrations via NINDF Control in Beam Structures. Mathematics, 13(13), 2137. https://doi.org/10.3390/math13132137