

Distributed Traffic Signal Optimization at V2X Intersections


Abstract
1. Introduction
2. Literature Review
2.1. Traditional Distributed Traffic Signal Systems in Operations
2.2. Traffic Signal Control Systems at V2X Intersections
2.3. Distributed Traffic Signal Control Systems
2.4. Summaries
3. Objectives and Approaches
3.1. Objectives
3.2. The Distributed System Approach
4. Methodologies and Models
4.1. Forecast the Number of Vehicles in the Queue
4.2. The Objective Function and Its First Degree of Deviations
4.3. Two-Stage Models in Distributed System
5. Case Studies
5.1. Simulation Network Calibration and Case Studies
5.2. Mobility Benefit and Control Strategies
5.3. Mobility Benefit and Penetration Rates
6. Conclusions and Future Directions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, L.; Zhang, L.; Huang, Z.; Curtis, D.M.; McHale, G.; Li, P. Benefits of Early Deployment of Connected Vehicles at Signalized Intersections; Transportation Research Board: Washington, DC, USA, 2018. [Google Scholar]
- Huang, Z.; Zhang, L.; Curtis, D.M.; Vadakpat, G.; Zhang, L.; Ma, J.; Hale, D.K. Arterial-Level Traffic Progression Optimization Model within Connected Vehicle Environment. In Proceedings of the Transportation Research Board 97th Annual Meeting, Washington, DC, USA, 7–11 January 2018. [Google Scholar]
- Zhang, L.; Zhang, L. Safety and Mobility Benefits of Connected Vehicles; No. FHWA-JPO-18-613; FHWA: Washington, DC, USA, 2018; Volume I & II. [Google Scholar] [CrossRef]
- NHTSA. Preliminary Regulatory Impact Analysis: Vehicle-To-Vehicle Communication Technology for Light Vehicles; National Highway Traffic Safety Administration, US Department of Transportation: Washington, DC, USA, 2016.
- Kopelias, P.; Demiridi, E.; Vogiatzis, K.; Skabardonis, A.; Zafiropoulou, V. Skabardonis, and V. Zafiropoulou. Connected & Autonomous Vehicles-Environmental Impacts—A Review. Sci. Total Environ. 2020, 712, 135237. [Google Scholar] [CrossRef]
- Rana, M.M.; Hossain, K. Connected and Autonomous Vehicles and Infrastructures: A Literature Review. Int. J. Pavement Res. Technol. 2023, 16, 264–284. [Google Scholar] [CrossRef]
- Shladover, S.E. Connected and Automated Vehicle Systems: Introduction and Overview. J. Intell. Transp. Syst. 2018, 22, 190–200. [Google Scholar] [CrossRef]
- J2735_201603; Dedicated Short Range Communications (DSRC) Message Set Dictionary (Apr 2015). SAE International: Warrendale, PA, USA, 2015; Volume 402.
- What Is Distributed Computing—IBM Documentation. Available online: https://www.ibm.com/docs/en/txseries/9.1?topic=SSAL2T_9.1.0/com.ibm.cics.tx.doc/concepts/c_wht_is_distd_comptg.htm (accessed on 19 December 2023).
- FHWA. What Are Adaptive Signal Control Technologies? Available online: http://www.fhwa.dot.gov/everydaycounts (accessed on 19 December 2023).
- Li, J.; Peng, L.; Hou, K.; Tian, Y.; Ma, Y.; Xu, S.; Qiu, T.Z.; Li, J.; Peng, L.; Hou, K.; et al. Adaptive Signal Control and Coordination for Urban Traffic Control in a Connected Vehicle Environment: A Review. Digit. Transp. Saf. 2023, 2, 89–111. [Google Scholar] [CrossRef]
- Papageorgiou, M.; Diakaki, C.; Dinopoulou, V.; Kotsialos, A.; Wang, Y. Review of Road Traffic Control Strategies. Proc. IEEE 2003, 91, 2043–2067. [Google Scholar] [CrossRef]
- State-of-Art Review of Traffic Signal Control Methods: Challenges and Opportunities|European Transport Research Review|Full Text. Available online: https://etrr.springeropen.com/articles/10.1186/s12544-020-00439-1 (accessed on 18 December 2023).
- Stevanovic, A. Adaptive Traffic Control Systems: Domestic and Foreign State of Practice. In Adaptive Traffic Control Systems: Domestic and Foreign State of Practice; The National Academies Press: Washington, DC, USA, 2010. [Google Scholar] [CrossRef]
- Kulkarni, A.R.; Kumar, N.; Rao, K.R. 100 Years of the Ubiquitous Traffic Lights: An All-Round Review. IETE Tech. Rev. 2023. [Google Scholar] [CrossRef]
- FDOT. Advanced Signal Control Technology; FDOT: Tallahassee, FL, USA, 2016.
- Mirchandani, P.; Head, L. A Real-Time Traffic Signal Control System: Architecture, Algorithms, and Analysis. Transp. Res. Part C Emerg. Technol. 2001, 9, 415–432. [Google Scholar] [CrossRef]
- Shelby, S.G.; Bullock, D.M.; Sabra, Z.; Ghaman, R.S.; Soyke, N.; Gettman, D. An Overview and Performance Evaluation of ACS Lite: A Low Cost Adaptive Signal Control System. In Proceedings of the Transportation Research Board 87th Annual Meeting, Washington, DC, USA, 13–17 January 2008. [Google Scholar]
- Gettman, D. An Overview of Kadence; Kimley-Horn and Associates, Inc.: Tucson, AZ, USA, 2020; Available online: https://www.kimley-horn.com/wp-content/uploads/2020/08/Kadence-Overview.pdf (accessed on 20 December 2023).
- Jing, P.; Huang, H.; Chen, L. An Adaptive Traffic Signal Control in a Connected Vehicle Environment: A Systematic Review. Information 2017, 8, 101. [Google Scholar] [CrossRef]
- Majstorović, Ž.; Tišljarić, L.; Ivanjko, E.; Carić, T. Urban Traffic Signal Control under Mixed Traffic Flows: Literature Review. Appl. Sci. 2023, 13, 4484. [Google Scholar] [CrossRef]
- Feng, Y.; Head, K.L.; Khoshmagham, S.; Zamanipour, M. A Real-Time Adaptive Signal Control in a Connected Vehicle Environment. Transp. Res. Part C Emerg. Technol. 2015, 55, 460–473. [Google Scholar] [CrossRef]
- Zhang, Y.J.; Malikopoulos, A.A.; Cassandras, C.G. Optimal Control and Coordination of Connected and Automated Vehicles at Urban Traffic Intersections. In Proceedings of the American Control Conference (ACC), Boston, MA, USA, 6–8 July 2016. [Google Scholar]
- Wu, W.; Huang, L.; Du, R. Simultaneous Optimization of Vehicle Arrival Time and Signal Timings within a Connected Vehicle Environment. Sensors 2019, 20, 191. [Google Scholar] [CrossRef]
- Astarita, V.; Giofré, V.P.; Festa, D.C.; Guido, G.; Vitale, A. Floating Car Data Adaptive Traffic Signals: A Description of the First Real-Time Experiment with “Connected” Vehicles. Electronics 2020, 9, 114. [Google Scholar] [CrossRef]
- Bin Al Islam, S.; Hajbabaie, A. Distributed Coordinated Signal Timing Optimization in Connected Transportation Networks. Transp. Res. Part C Emerg. Technol. 2017, 80, 272–285. [Google Scholar] [CrossRef]
- Bin Al Islam, S.; Hajbabaie, A.; Aziz, H.A. A Real-Time Network-Level Traffic Signal Control Methodology with Partial Connected Vehicle Information. Transp. Res. Part C Emerg. Technol. 2020, 121, 102830. [Google Scholar] [CrossRef]
- Agafonov, A.; Yumaganov, A.; Myasnikov, V. Cooperative Control for Signalized Intersections in Intelligent Connected Vehicle Environments. Mathematics 2023, 11, 1540. [Google Scholar] [CrossRef]
- Wei, H.; Zheng, G.; Gayah, V.; Li, Z. A Survey on Traffic Signal Control Methods. arXiv 2019, arXiv:1904.08117. [Google Scholar]
- Mo, Z.; Li, W.; Fu, Y.; Ruan, K.; Di, X. CVLight: Decentralized Learning for Adaptive Traffic Signal Control with Connected Vehicles. Transp. Res. Part C Emerg. Technol. 2022, 141, 103728. [Google Scholar] [CrossRef]
- Maadi, S.; Stein, S.; Hong, J.; Murray-Smith, R. Real-Time Adaptive Traffic Signal Control in a Connected and Automated Vehicle Environment: Optimisation of Signal Planning with Reinforcement Learning under Vehicle Speed Guidance. Sensors 2022, 22, 7501. [Google Scholar] [CrossRef] [PubMed]
- Zhou, P.; Chen, X.; Liu, Z.; Braud, T.; Hui, P.; Kangasharju, J. DRLE: Decentralized Reinforcement Learning at the Edge for Traffic Light Control in the IoV. IEEE Trans. Intell. Transp. Syst. 2021, 22, 2262–2273. [Google Scholar] [CrossRef]
- Gao, K.; Han, F.; Dong, P.; Xiong, N.; Du, R. Connected Vehicle as a Mobile Sensor for Real Time Queue Length at Signalized Intersections. Sensors 2019, 19, 2059. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhou, Y. Distributed Coordination Control of Traffic Network Flow Using Adaptive Genetic Algorithm Based on Cloud Computing. J. Netw. Comput. Appl. 2018, 119, 110–120. [Google Scholar] [CrossRef]
- Mehrabipour, M.; Hajbabaie, A. A Cell-Based Distributed-Coordinated Approach for Network-Level Signal Timing Optimization. Comput. -Aided Civ. Infrastruct. Eng. 2017, 32, 599–616. [Google Scholar] [CrossRef]
- Ahmed, F.; Easa, S.M. Novel Real-Time Distributed Signal Control System for Urban Traffic Networks. In Proceedings of the Transportation Research Board 96th Annual Meeting, Washington, DC, USA, 8–12 January 2017. [Google Scholar]
- Srinivasan, D.; Choy, M.C.; Cheu, R.L. Neural Networks for Real-Time Traffic Signal Control. IEEE Trans. Intell. Transp. Syst. 2006, 7, 261–272. [Google Scholar] [CrossRef]
- Tassiulas, L.; Ephremides, A. Stability Properties of Constrained Queueing Systems and Scheduling Policies for Maximum Throughput in Multihop Radio Networks. IEEE Trans. Autom. Control 1992, 37, 1936–1948. [Google Scholar] [CrossRef]
- Varaiya, P. Max Pressure Control of a Network of Signalized Intersections. Transp. Res. Part C Emerg. Technol. 2013, 36, 177–195. [Google Scholar] [CrossRef]
- Wongpiromsarn, T.; Uthaicharoenpong, T.; Wang, Y.; Frazzoli, E.; Wang, D. Distributed Traffic Signal Control for Maximum Network Throughput. In Proceedings of the 2012 15th International IEEE Conference on Intelligent Transportation Systems, Anchorage, AK, USA, 16–19 September 2012. [Google Scholar]
- Zaidi, A.; Kulcsár, B.; Wymeersch, H. Traffic-Adaptive Signal Control and Vehicle Routing Using a Decentralized Back-Pressure Method. In Proceedings of the European Control Conference (ECC), Linz, Austria, 15–17 July 2015; Volume 2015, pp. 3029–3034. [Google Scholar]
- Chow, A.H.F.; Sha, R. Performance Analysis of Centralized and Distributed Systems for Urban Traffic Control. Transp. Res. Rec. J. Transp. Res. 2016, 2557, 66–76. [Google Scholar] [CrossRef]
- Timotheou, S.; Panayiotou, C.G.; Polycarpou, M.M. Online Distributed Network Traffic Signal Control Using the Cell Transmission Model. In Proceedings of the 17th International IEEE Conference on Intelligent Transportation Systems, Qingdao, China, 8–11 October 2014. [Google Scholar]
- Timotheou, S.; Panayiotou, C.G.; Polycarpou, M.M. Distributed Traffic Signal Control Using the Cell Transmission Model via the Alternating Direction Method for Multipliers. IEEE Trans. Intell. Transp. Syst. 2015, 16, 919–933. [Google Scholar] [CrossRef]
- Hunter, M.; Mathew, J.K.; Cox, E.; Blackwell, M.; Bullock, D.M. Estimation of Connected Vehicle Penetration Rate on Indiana Roadways. JTRP Affil. Rep. 2021. [Google Scholar] [CrossRef]
- Zhang, L. Network Wide Signal Control Strategy Base on Connected Vehicle Technology. Ph.D. Dissertation, Mississippi State University, Mississippi State, MS, USA, 2018. [Google Scholar]
- FHWA. Microscopic Traffic Simulation Models and Software: An Open Source Approach; FHWA: Washington, DC, USA, 2017.
- Dedieu, J.-P. Newton-Raphson Method. Encycl. Appl. Comput. Math. 2015, 6, 1023–1028. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
| The index of coordinated intersections ( = 1, 2, 3, …, and ) | |
| Total number of coordinated intersections in a signalized arterial | |
| Approach of each intersection (d = 1, 2, 3, …, and D) | |
| Total number of approaches for an intersection | |
| , | The index of phases (on coordination directions and non-coordination directions) for an intersection ( = 1, 2, 3, …, and P) |
| , , | Total numbers of phases (on coordination directions and non-coordination directions) for an intersection |
| ∆ | Time interval to calculate queue delays (1s is used) |
| The t’th time interval in the projection horizon ( = 1, 2, 3, … and T) | |
| Total number of time intervals in the projection horizon | |
| Time since the beginning of the projection horizon | |
| The total queue delay function within the projection horizon (one cycle) | |
| X | Traffic signal control variables, including cycle length, offset, and phase green time |
| The total queue delay of phase at the m’th intersection within the projection horizon (one cycle) | |
| The number of vehicles in the queue of approach at intersection at time interval | |
| Offset of intersection | |
| The duration of red indications before green phase at intersection (seconds) | |
| The duration of green time of phase at intersection (seconds) | |
| The cycle length of coordinated intersections | |
| The total lost time of intersection due to all red and startup loss time (seconds) for one cycle. | |
| Vehicle movement of phase at intersection within projection horizon (%) (Turning Percentage) | |
| Number of arrival vehicles joining the queue at intersection at projection horizon (vehs) | |
| Number of vehicles in the initial queue region at intersection that remains in the queue at a time interval (vehs, in a non-coordinated phase) | |
| Number of vehicles in queue formulation region at intersection at a time interval (vehs, in a non-coordinated phase) | |
| Number of vehicles in progression formulation region one at intersection at a time interval (vehs, in a non-coordinated phase) | |
| Number of vehicles in progression formulation region two at intersection at time interval (vehs, in a non-coordinated phase) | |
| Number of discharge vehicles in phase at intersection at projection horizon (vehs) | |
| Number of discharge vehicles in approach at intersection at projection horizon (vehs) | |
| Discharge headway of vehicle in phase at intersection at projection horizon (vehs/s) | |
| Any discharge headway of vehicle in phase at intersection at time (vehs/s) where i | |
| r | r’th iteration in seeking optimal cycle length, offset, and green time |
| 1. Two-Stage DS with Time Limit | |||||
| Summary | 10% | 25% | 50% | 60% | 70% |
| Major Direction | −21.82% | −25.62% | −29.54% | −32.26% | −33.30% |
| Minor Direction | −7.43% | −9.54% | −10.81% | −11.63% | −12.27% |
| 2. Two-Stage DS without Time Limit | |||||
| Summary | 10% | 25% | 50% | 60% | 70% |
| Major Direction | −23.33% | −27.48% | −31.08% | −34.05% | −34.95% |
| Minor Direction | −8.37% | −10.61% | −11.83% | −12.68% | −13.32% |
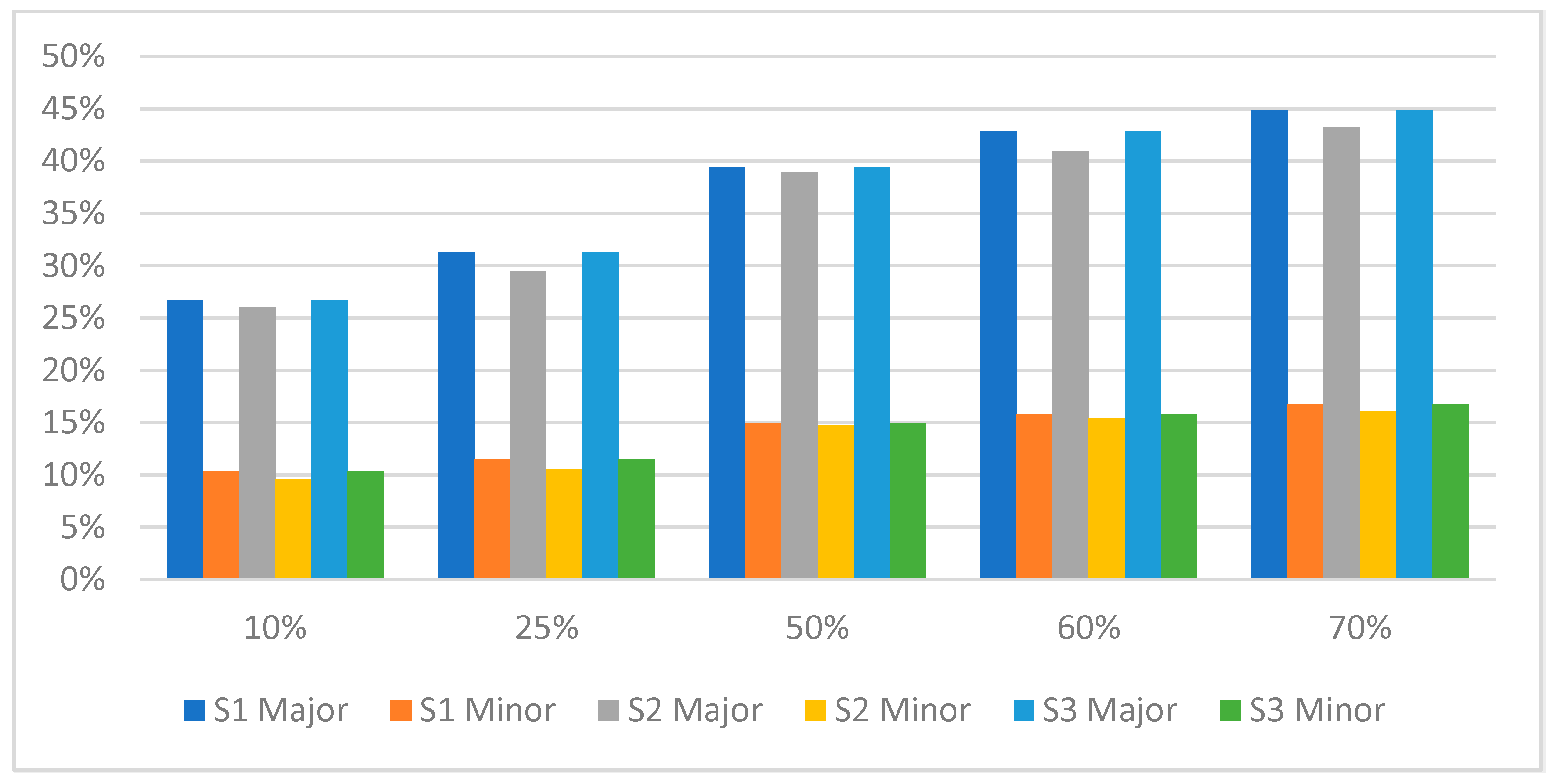
| 3. Two-Stage Centralized System without Time Limit and Full Optimization | |||||
| Summary | 10% | 25% | 50% | 60% | 70% |
| Major Direction | −26.68% | −31.25% | −39.45% | −42.80% | −44.88% |
| Minor Direction | −10.35% | −11.48% | −14.92% | −15.83% | −16.75% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, L.; Zhang, L. Distributed Traffic Signal Optimization at V2X Intersections. Mathematics 2024, 12, 773. https://doi.org/10.3390/math12050773
Zhang L, Zhang L. Distributed Traffic Signal Optimization at V2X Intersections. Mathematics. 2024; 12(5):773. https://doi.org/10.3390/math12050773
Chicago/Turabian StyleZhang, Li, and Lei Zhang. 2024. "Distributed Traffic Signal Optimization at V2X Intersections" Mathematics 12, no. 5: 773. https://doi.org/10.3390/math12050773
APA StyleZhang, L., & Zhang, L. (2024). Distributed Traffic Signal Optimization at V2X Intersections. Mathematics, 12(5), 773. https://doi.org/10.3390/math12050773