1. Introduction
The development of blockchain technology and internet technology has provided a software and hardware foundation for cross-border e-commerce platforms. At the same time, some social issues, such as an aging society, have further promoted the development of cross-border e-commerce platforms [
1]. A recent survey found that an important factor affecting the development of cross-border e-commerce is the cost and risk of logistics during cross-border transportation [
2]. Therefore, this study focuses on the logistics and transportation issues of cross-border e-commerce. In the process of fulfilling orders on cross-border e-commerce platforms, logistics delivery optimizers need to optimize the delivery routes of orders in a reasonable manner. In the optimization process, it is necessary to consider transportation costs, carbon emissions, and consumer satisfaction, aiming to provide good services to consumers while creating more profits for distribution enterprises, protecting the environment, and helping cross-border e-commerce enterprises achieve sustainable development.
Unlike ordinary logistics distribution processes and last-mile delivery, cross-border e-commerce is increasingly inclined to use multimodal transportation methods in the transportation process [
3,
4]. There have been some studies that have used the truck-drone collaborative distribution model in the last-mile delivery process [
5], but these studies are not applicable to the distribution problem of cross-border e-commerce. This is because cross-border e-commerce delivery has a large geographical span, and the single delivery model based on trucks is no longer applicable. Cross-border e-commerce logistics distribution usually consists of two steps: (1) long-distance transportation based on airplanes and ships, and (2) short-distance transportation based on trucks and other small transportation vehicles (such as drones).
In [
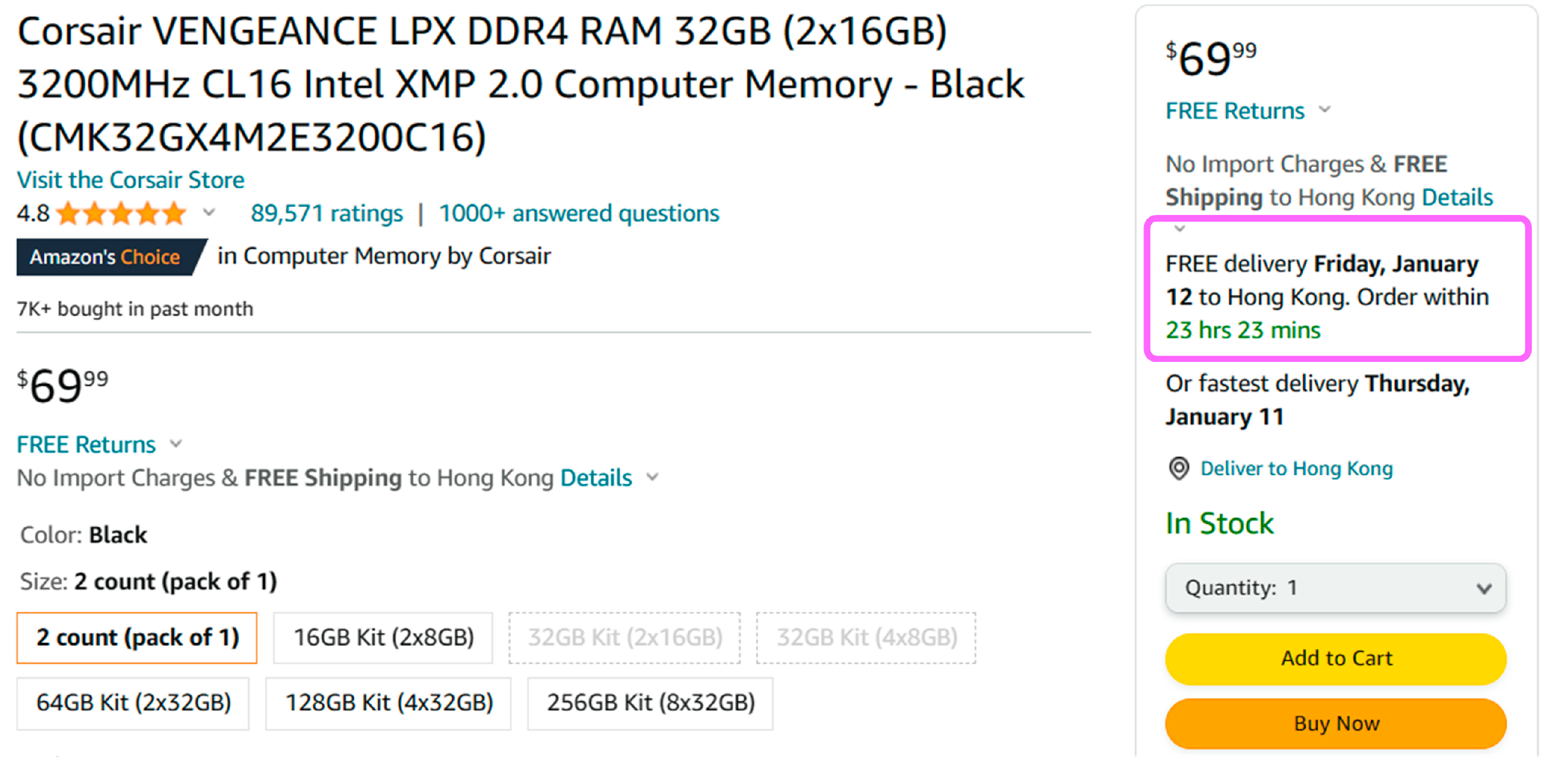
6], when conducting logistics distribution for cross-border e-commerce, the focus was on the cost of distribution and customer satisfaction. Path cost usually consists of path length cost or time cost. Customer satisfaction is determined by the expected arrival time of the customer and the actual arrival time of the product. As shown in
Figure 1, selecting a product from the United States on the Amazon cross-border e-commerce platform will generate an estimated arrival time when the consumer places an order. If the estimated arrival time generated by the platform meets the customer’s expected arrival time, the customer will choose to place an order. According to work [
6], if the customer places an order too early or too late, it can lead to customer dissatisfaction.
Unlike work [
6], with the proposal and development of sustainable development goals, some research on logistics distribution issues has introduced carbon emissions during logistics transportation into the objective function [
7]. Therefore, the objective function in this study considers three objectives: path cost, carbon emissions, and satisfaction of the distribution process. In addition, it is worth pointing out that most of the research on cross-border e-commerce logistics distribution has focused on only a portion of cross-border e-commerce logistics. For example, in reference [
3], long-distance transportation was given special attention, while in work [
6], short-distance transportation was given special attention. Specifically, all studies have focused on one or several steps in the process of multimodal transportation, rather than the entire process of cross-border e-commerce multimodal transportation.
At present, in order to develop the potential of related research in commercial applications, some work has integrated several independent works and established corresponding double-layer or multi-objective mathematical models, especially in the fields of robotics and automation [
8,
9,
10]. The above research provides ideas for the establishment of a more comprehensive integrated model for multimodal transportation in cross-border e-commerce logistics distribution. The main contributions of this study are summarized as follows:
A target function was established to address the issue of cross-border e-commerce logistics distribution, considering three objectives: path cost, carbon emissions, and satisfaction of the distribution process.
This study integrates long-distance transportation based on aviation and the last-mile delivery problem based on vehicles and drones, making it more in line with the actual standards of cross-border e-commerce logistics distribution.
In response to the problem of the sand cat swarm optimization (SCSO) algorithm easily falling into local optima, improvement strategies including chaotic initialization, elite retention strategy, and nonlinear weights strategy were designed to enhance the algorithm’s ability to jump out of local optima.
Due to the lack of benchmark examples for this issue, similar to work [
6], simulation experiments were conducted on real delivery orders from four port cities and compared with several other algorithms. The results proved the effectiveness of the logistics distribution optimizer based on improved swarm intelligence algorithms.
The remaining parts of this study are arranged as follows, and
Section 2 reviews the work related to cross-border e-commerce logistics and distribution issues.
Section 3 establishes a mathematical model for cross-border e-commerce logistics distribution.
Section 4 designs a swarm intelligence optimizer.
Section 5 presents the results of the simulation experiment. Finally,
Section 6 summarizes the entire text.
3. A Mathematical Model for Cross-Border E-Commerce Logistics Distribution
In this section, the cross-border e-commerce problem is defined, and a mathematical model for cross-border e-commerce logistics distribution is established.
Figure 2 shows the complete cross-border e-commerce logistics process after consumers place orders. Firstly, after placing an order on the cross-border e-commerce platform, consumers can declare their port of entry through the cross-border e-commerce platform. After receiving orders from consumer cross-border e-commerce platforms, suppliers declare to the export port and transport the orders from the warehouse to the export port by truck. At this point, cross-border e-commerce logistics transportation enters the next stage, and orders are transported from the exit port to different entry ports through air transportation. Afterwards, the order enters the final mile of delivery and is transported through a combination of trucks and drones. The reason why air freight is chosen for cross-border (international logistics) transportation is because sea freight usually takes more than 15 days, while air freight only takes 3 days [
12]. The standard delivery time provided by cross-border e-commerce platforms is 10 days, as shown in
Figure 1. In this article, international express delivery departs from Berlin, Germany, and arrives in different port cities, including Hong Kong, Shanghai, Tianjin, and Ningbo.
3.1. Symbol Description
Before the model was established, some symbol explanations used in this study were provided, as shown in
Table 1.
3.2. International Transportation Based on Air Freight
In the cross-border transportation process based on air transportation, specific considerations have been made to minimize transportation costs and carbon emissions during the air transportation process.
The transportation cost of air transportation is usually related to the flight distance of the aircraft, as shown in Formula (1).
The carbon emission cost of air transportation is related to the weight of the cargo loaded and the distance traveled by the aircraft, as shown in Formula (2).
3.3. Last-Mile Delivery
As mentioned earlier, the process of joint last-mile delivery between freight vehicles and drones mainly consists of two parts. The first part is the selection of a vehicle parking sequence, which can serve as a variant of the VRP problem. The second part is the trajectory planning problem for unmanned aerial vehicles. In this study, the transportation costs and carbon emissions of freight vehicles were considered. At the same time, corresponding sub-objective functions were established with the goal of minimizing the flight time of the drone. During drone flights, drones are limited to a course altitude of 125 m when flying in urban areas, according to regulations under Part 135 of the Federal Aviation Administration [
26].
The transportation cost of freight vehicles is defined as follows:
The cost of carbon emissions from freight vehicles is defined as follows:
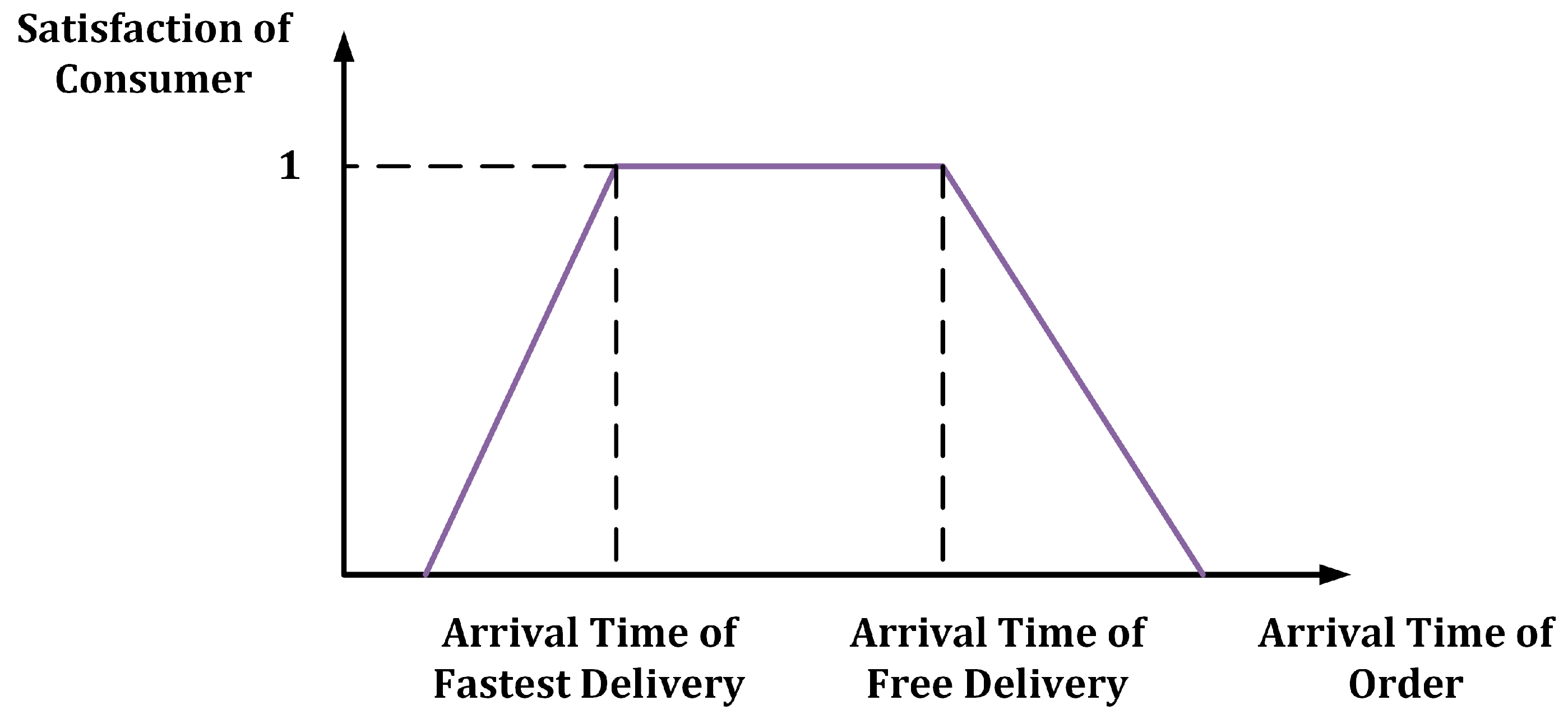
Customer satisfaction during order fulfillment is also related to shipping time. When a customer places an order, the customer’s desired delivery time interval and acceptable delivery time interval are
,
respectively. This study is based on fuzzy theory and applies fuzzy processing to the customer’s time window to accurately reflect their satisfaction level.
Figure 3 shows the relationship between customer satisfaction and order completion time. In the process of fulfilling an order, if the order is completed within the expected delivery time interval
of the customer, the customer’s satisfaction level is 1; If the order is not completed within the expected delivery time interval of the customer, but is completed within the acceptable delivery time interval
of the customer, the customer’s satisfaction is calculated based on the deviation between the completion time of the order and the expected delivery time of the customer; If an order is not delivered within an acceptable time interval
of the customer, the customer’s satisfaction level is zero.
According to
Figure 3, the satisfaction function of consumers is shown below.
Therefore, the objective function of this study is defined as follows.
where
,
,
,
,
and
are the weights of the objective function components, respectively.
The constraint conditions are defined as follows.
where, Formula (12) ensures that every consumer is delivered. Formula (13) limits the maximum tilt angle of the drone,
. Formula (14) limits the flight time of the drone. Formula (16) limits the maximum altitude that the drone can fly.
5. Discussion
To assess the practical applicability of the proposed model and algorithms in this study, we established a real-world transportation scenario. Specifically, a supplier based in Berlin, Germany, engaged in international trade with China, has a shipment of high-value goods destined for four entry ports in China: Hong Kong, Shanghai, Tianjin, and Ningbo.
Table 3 provides the latitude and longitude coordinates of these ports, along with information about the maximum carrying capacity for the goods. Upon goods reception, trucks with 4 tons of load capacity are employed to transport the goods by road based on the order quantity of surrounding centers so that their order quantities are also taken into account.
Table 4 outlines details for 42 centers with demands for the goods, including latitude/longitude coordinates, order demand, desired delivery time interval
and acceptable delivery time interval
. We conducted extensive simulation studies to evaluate the performance of our proposed algorithm in various scenarios. The data collected involved assumptions and simulated parameters to model real-world international parcel delivery issues, and is referenced on the website:
https://neo.lcc.uma.es/vrp/vrp-instances/ (accessed on 27 August 2023).
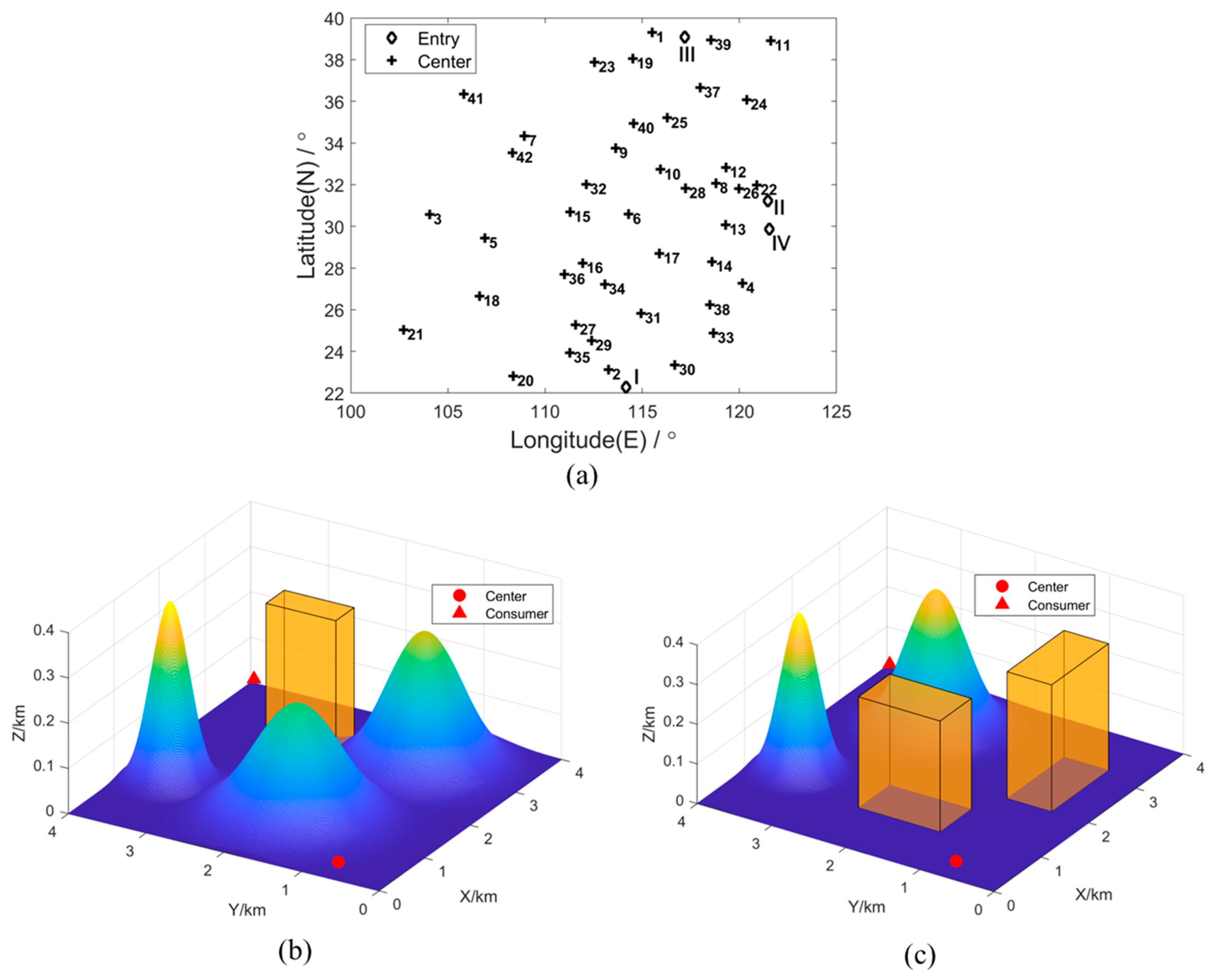
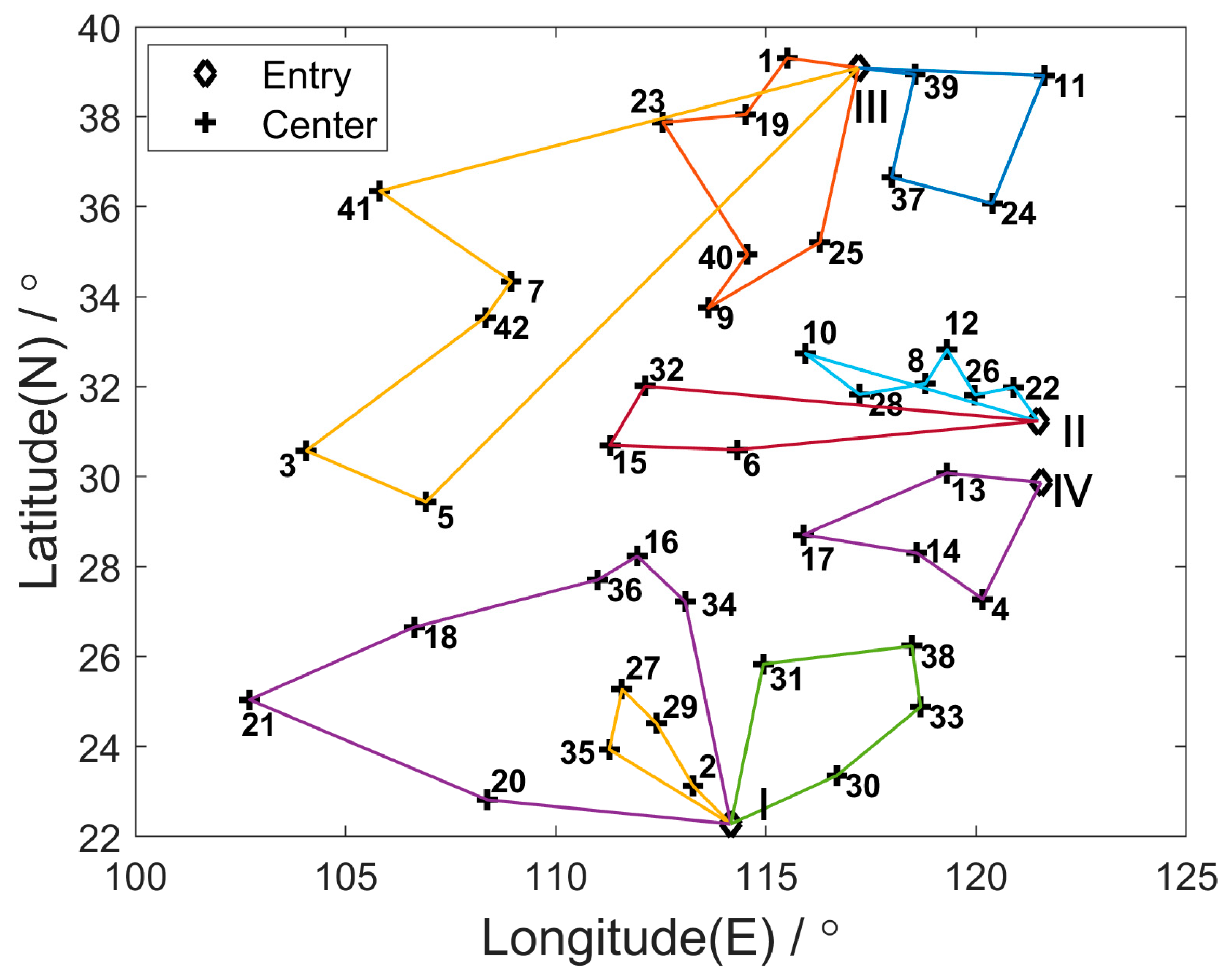
The spatial distribution of the centers and entry ports is illustrated in
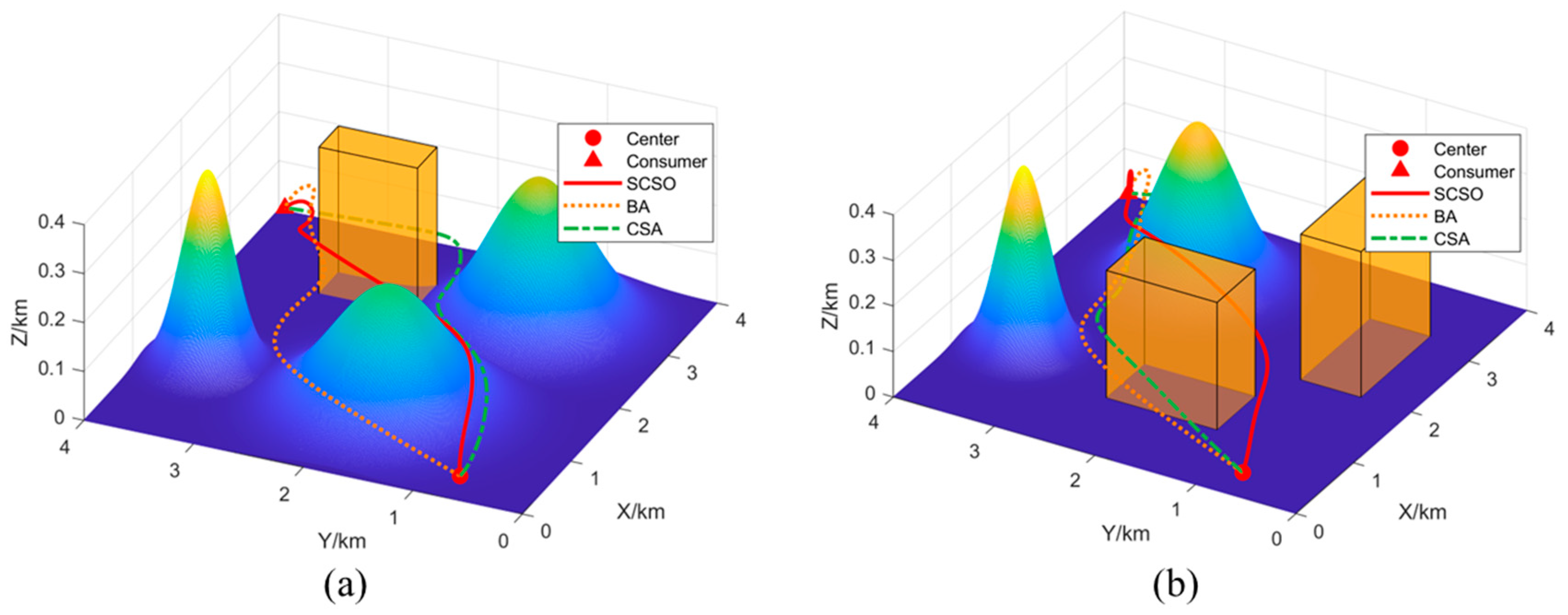
Figure 5a. Subsequent to goods reaching the centralized distribution center, UAVs are utilized for customer deliveries, and a 3D map depicting the route from the center to the customer is created using MATLAB R2022b, as illustrated in
Figure 5b for scenario #1 and
Figure 5c for scenario #2. To facilitate comparison with the improved SCSO algorithm employed in this study, we utilized the Bat Algorithm (BA) [
37] and Cuckoo Search Algorithm (CSA) [
38,
39] to optimize the model presented in this paper.
Initially, the improved SCSO algorithm is applied to optimize the road transport scheme, as depicted in
Figure 6 and detailed in
Table 5. Notably,
Table 5 reveals that the Full Load Ratio for each planned transport route exceeds 76%, effectively utilizing the loading capacity of trucks.
The results of obstacle avoidance route optimization in the 3D scenario from center to customer are presented in
Figure 7 and
Figure 8. Both the top view in
Figure 7 and the 3D view in
Figure 8 illustrate that all three algorithms effectively navigate around obstacles. However, the SCSO algorithm achieves a notably shorter route length. To provide a more detailed comparison of the advantages and disadvantages of the three algorithms in UAV route optimization, we calculated the route distance and detour rate, as summarized in
Table 6 and
Table 7. The detour rate is defined as the ratio of the detour distance to the straight-line distance between two points. In
Table 6 for scenario #1, the SCSO, BA, and CSA algorithms optimize routes with distances of 5.62, 6.57, and 7.05 km and detour rates of 16.78%, 36.47%, and 46.41%, respectively. And in
Table 7 for scenario #2, the SCSO, BA, and CSA algorithms optimize routes with distances of 5.66, 6.07, and 6.54 km and detour rates of 17.51%, 26.02%, and 35.78%, respectively. It is evident that the SCSO algorithm yields the shortest routes and the lowest detour rates.
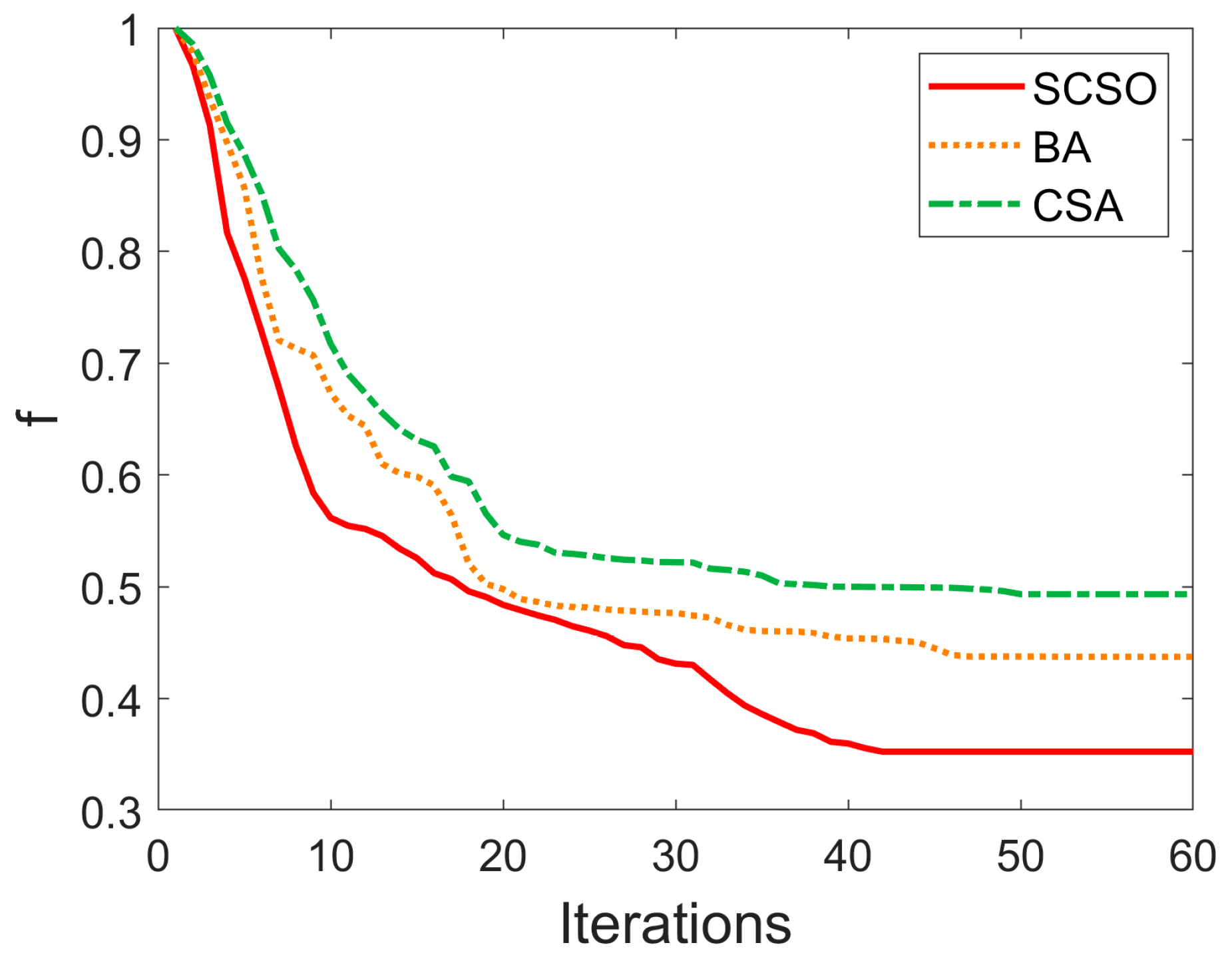
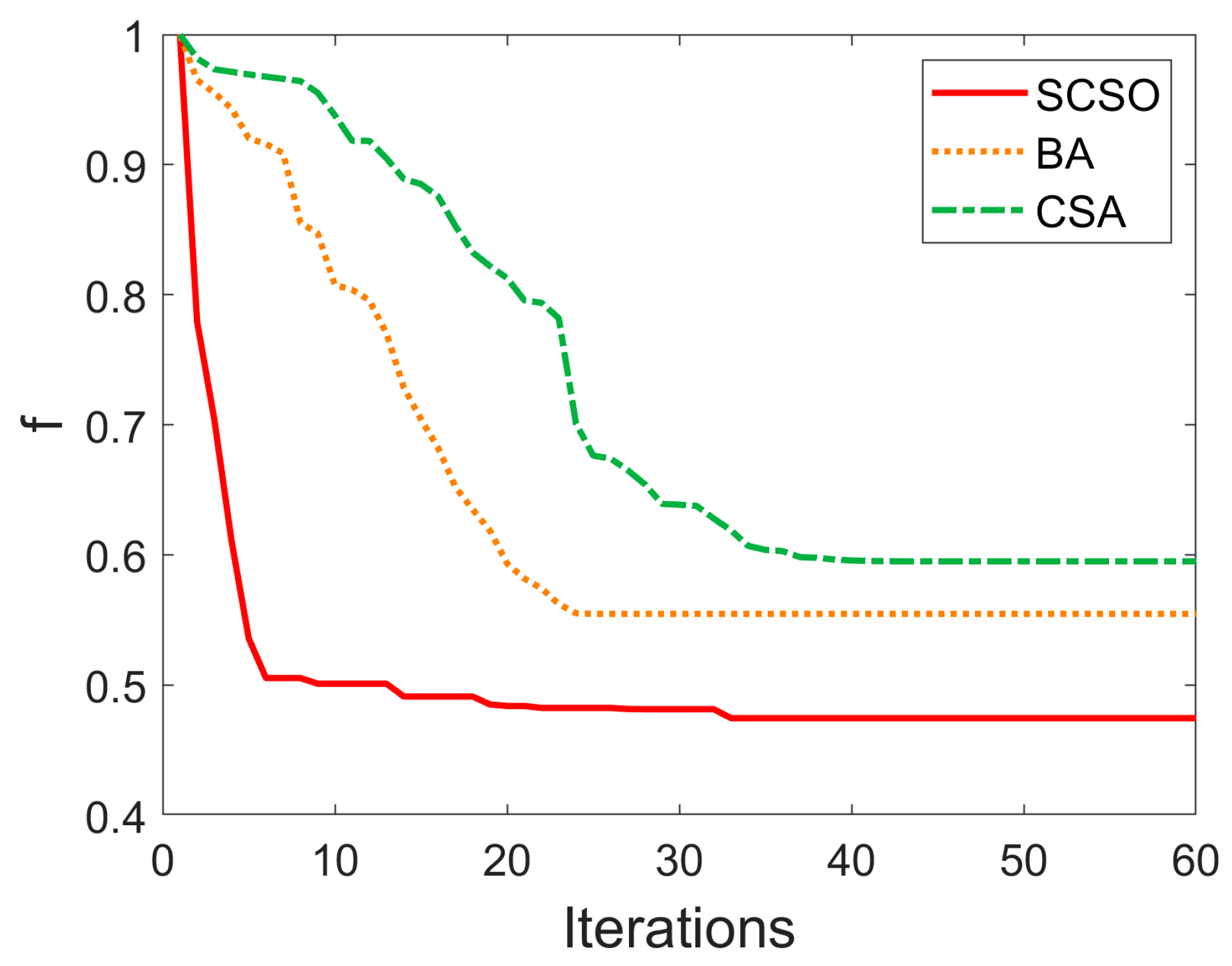
Concerning the final objective function, the normalized iterative profiles of the three algorithms are depicted in
Figure 9. Notably, SCSO showcases superior global convergence, consistently yielding the smallest objective function values.
To assess the stability of the algorithms, we conducted 30 runs for each, and the average iteration curves per generation are presented in
Figure 10. Once again, the SCSO algorithm demonstrates its ability to converge to lower objective function values, highlighting the robust stability of all algorithms.
6. Conclusions
In conclusion, this study addresses the increasing prominence of multimodal transportation modes in cross-border e-commerce logistics activities by constructing a logistics distribution optimization model. The formulated mathematical model, with its objective functions focused on minimizing distribution costs, reducing carbon emissions, and maximizing customer satisfaction, encapsulates the diverse considerations inherent in this dynamic field. Constraints from various dimensions, including cargo aircraft and vehicle load limitations, were comprehensively integrated into the model. To enhance the optimization process, improvement strategies were devised based on the SCSO algorithm. The resulting improved swarm intelligence algorithm proved effective in solving the proposed model.
The practical applicability of the mathematical model and the improved swarm intelligence algorithm was demonstrated through a real-world case study of cross-border e-commerce logistics transportation. The outcomes underscored the efficacy of the proposed solution. Specifically, the utilization of the proposed solution demonstrated a remarkable full load ratio exceeding 76%, indicating highly efficient utilization of transport routes. Moreover, the detour rates obtained through the SCSO algorithm, BA algorithm, and CSA algorithm revealed that the SCSO algorithm outperformed, yielding the shortest routes and the lowest detour rates. Finally, the aggregated objective function results indicate that the SCSO algorithm is effective in reducing the cost of delivery and carbon emissions, concurrently improving customer satisfaction comprehensively.
These results collectively reinforce the comprehensive benefits of the proposed approach to optimizing multimodal transportation in cross-border e-commerce, offering a robust solution that addresses logistics efficiency, environmental considerations, and customer satisfaction simultaneously.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}