1. Introduction
There are at least two branches of mathematics where maximal tori of compact Lie groups play a crucial role. The first one is the representation theory of a finite-dimensional Lie group. The Lie algebra of a maximal torus that is a Cartan subalgebra determines the roots and all the irreducible representations of the Lie algebra.
The other area is symplectic geometry and dynamical systems. Indeed, if the action of a maximal abelian group of dimension n on a symplectic manifold M of dimension is effective and Hamiltonian, the n component of the moment map form a completely integrable system and the functions are constants of motion of the dynamical system.
In this paper, we are interested in the infinite-dimensional torus.
The first (known) maximal torus was described by D. Bao and T. Ratiu in their paper [
1]. Later on, it was discovered in [
2,
3] that if
is a compact connected symplectic toric manifold, then the group of s-Sobolev equivariant symplectomorphisms
is a maximal torus of the Lie group of the s-Sobolev symplectomorphism of
.
is also equal to the stabilizer of the moment map under the action of the group,
of Sobolev symplectomorphism of
.
In this paper, we will show that the infinite-dimensional torus of a sphere is induced by the maximal torus of the unitary group
. This is not surprising, because in [
2,
4], the authors have shown similarities between
and the group of symplectomorphism of the annulus. Our results in this paper should reinforce the belief that
is
.
Let us mention that the authors of [
1] have pointed out that there are two ways to approximate
: either continuously, that is, at the Lie algebra level, or discretely, that is, using finite groups. The latter is what we did in this paper. We discretize the sphere using the moment map in a way similar to [
5,
6,
7,
8].
This paper is organized into four sections. In
Section 2, we review facts about the unitary group
. In
Section 3, we prove that a unitary diagonal matrix defines an invertible measure-preserving transformation of the sphere and, consequently, that the infinite-dimensional torus is the limit of the finite-dimensional torus
. In
Section 4, we compute the normalizer of the infinite-dimensional torus from the normalizer of
, and we show that the limit of the Weyl group of
is nothing but the Weyl group of the infinite dimensional torus.
2. Special Unitary Matrices
The group of
unitary matrices is the set
where
is the conjugate of the matrix
and
is the identity matrix.
The subgroup
of diagonal unitary matrices is a maximal abelian group:
Let us review the computation of the normalizer of
. By definition, the group
is calculated as follows:
The normalizer of is the largest subgroup of that stabilizes under conjugation. Let . If is a diagonal matrix, then it has the same eigenvalues as t, and therefore, the matrix is just a permutation of the diagonal of t. Let be the symmetric group of m letters and let . Let be the matrix defined by where is the Kronecker symbol.
So if
g is an element of the normalizer of
, then for
, there exists
such that
. This leads to
commuting with
t, and since
is maximal, this means that
. In conclusion, we have found that the normalizer of
is the subgroup
Therefore, the Weyl group is
Moreover,
is a Lie group diffeomorphic with
, and its Lie algebra is isomorphic with
. The exponential map is given by
.
3. Measure-Preserving Transformations of the Sphere
Think of
as the sphere in
. Then the one-dimensional torus
acts on it through rigid rotations about the vertical axis. This action is Hamiltonian concerning the Fubini–Study Symplectic form
and has a moment map of
J:
On the sphere, we have the Liouville measure, which, in this case, is just the symplectic form defined by where A is any Borel set of .
In all the sequels, we designate as either the sphere or the unit interval where is the Lebesgue measure.
A map
from
to itself is a measure-preserving transformation if
For example, on the real line, translations of the form preserve the length of segments. They are measure-preserving transformations.
Also, rotations by a fixed angle preserve areas and are also measure-preserving transformations on the plane .
A general example of measure-preserving transformation is symplectomorphisms. These are maps from a symplectic manifold to such that .
Let be the semi-group of measure-preserving transformations of , and let the set of invertible measure-preserving transformations. On the open set of , if we set , the symplectic form can be written , and therefore, the map that sends to the point is a measure-preserving transformation. Thus, as far as measure theory is concerned, the sphere is just a square of . The outcome of this identification is that we can build many measure-preserving transformations of the sphere through measure-preserving transformations of the square. Indeed, if is a measure-preserving transformation of the square, then the map is a measure-preserving transformation of the sphere. Afterwards, we will identify and .
Each determines a bounded linear operator on using . The Strong Operator Topology induces a topology on .
Evidently, a sequence converges to S in the Strong Operator Topology if for every function converges to in .
The collection of all sets of the form
constitute a sub-base for this topology on
.
In particular, if
denotes the characteristic function of a Borel set A, then
becomes
where
is the symmetric difference between two sets.
Another sub-base is the collection of sets of the form
; Halmos [
9] uses it to define the neighborhood topology.
3.1. Measure-Preserving Transformations of the Unit Interval
Measure-preserving transformations of the unit interval, as we will see, play a very important role in constructing measure-preserving transformations of a sphere. A subset of Smeas(I) of great importance is the set of dyadic permutations.
Call an interval a dyadic interval of rank m and a union of such intervals a dyadic set of rank m.
A dyadic permutation P of rank m is a one-to-one transformation of the interval which maps each dyadic interval of rank m onto itself or onto another one through an ordinary translation.
Theorem 1 (Density Of Dyadic Permutations). The set of dyadic permutations are dense in for the Strong Operator Topology.
Proof. It is shown in [
9] that the set of dyadic transformations is dense in
for the neighborhood topology.
Also, in [
10] it is proven that
is the closure of
for the Strong Operator Topology.
This shows the density of the set of dyadic transformations in for the Strong Operator Topology.
Now, the interesting thing is that dyadic permutations come from permutations. □
Theorem 2. Let be a symmetric group of letters. There exists a one-to-one group homomorphism from to Smeas(I).
Proof. Let
be a partition of the interval
. Define the map
by associating with each
the invertible measure-preserving transformation
such that
In other words if permutes the elements , then permutes the intervals
We remark that if then is a dyadic transformation. Therefore we have our first main theorem. □
Theorem 3. If , the map identifies the symmetric group with a set of dyadic transformations of rank n, and the images of all these symmetric groups for all different values of n constitute a dense set in for the Strong Operator Topology.
3.2. Some Subgroups of
Now, let us look at some examples of measures that preserve the transformation of the sphere.
The moment map J is a measure-preserving transformation.
Let and let be a spherical segment. Let be a symmetric group of letters. We have seen that every permutation defines a map that sends the interval to the interval through translation. induces a measure-preserving transformation on by permuting the spherical segments
Therefore, for every natural number m, the symmetric group can be identified with a subgroup of .
Let f be a differentiable function and let be the symplectic gradient of f. The flow of defines a family of invertible measure-preserving transformations of the sphere.
The finite-dimensional torus can be identified with a subgroup of , as stated in the following Theorem:
Theorem 4. There is an action of the finite-dimensional torus: Proof. Each element of the torus acts on , by simply rotating every spherical segment by an angle of around the vertical axis.
Of course, this action is not differentiable if the angles are different.
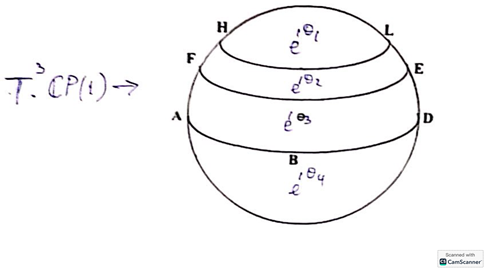
But these spherical segments become thinner and thinner as m becomes bigger and bigger. Ultimately, they will shrink down to circles and the action of the tori will just be rotating each circle of latitudes with a fixed angle The following picture illustrates how the torus acts on the sphere by rotating four spherical segments. □
![Mathematics 12 03829 i001]()
There is nothing special about the choice of the intervals . Any other partition of into m intervals is just fine:
Given a partition P of the interval into m subintervals,
, let
be a spherical segment and let
Then, by rotating the spherical segment
by an angle of
, we obtain an invertible measure preserving the transformation of the sphere.
So the intervals are just a particular partition.
We can generalize Theorem 4 as follows.
Theorem 5. Let be the set of partitions of the interval in exactly m intervals . Let be a spherical segment.
Then, there exists a mapdefined as follows: rotates each spherical segment by an angle . It was proven in [
2,
5] that the group
is a maximal torus of
Now, we can state one of our main results.
Theorem 6. Let be the subgroup of that rotates every circle of latitude with a fixed angle. We have the following:
For every , there exists a sequence such that , and converges point-wise to ϕ.
Proof. Let be defined by in the local chart .
Since is a measurable function on , it can be approximated by step functions: there exists , which converges point-wise almost everywhere to where is a partition of into m intervals.
It follows that is therefore an element of the torus associated with the partition . The convergence of the sequence is the consequence of the convergence of to . This complete the proof. □
4. Weyl Group
The Weyl group is, by definition, the group , where is a maximal abelian group.
Theorem 7. The normalizer of is the group of mapswith ϕ being an invertible measure-preserving transformation of j measurable and equal to almost everywhere, and k being measurable. the “Weyl group” may be identified with a group of maps of the form The authors in [
4] have shown that the Weyl group of the maximal torus of the annulus can be identified with a group of maps of the form
where
is an invertible measure-preserving transformation of the unit interval and
is a measurable function equal to
almost everywhere. Their proof applies word-by-word to the infinite-dimensional Lie group
of the sphere. For the sake of completeness, we reproduce the proof here.
Let
such that
where
and
are measurable functions and
for any measurable function
g. If
then (
5) becomes
which translates to
It follows from (7) that is a function of r alone.
Rewrite (8) as
The right hand side is independent of
, and therefore,
must be linear in
,
. Equation (8) then reads
This equation should be verified for every measurable unction
f, and this will happen only if the function
is one-to-one.
To summarize, the function is of the form with the function being one-to-one.
Now, since
is a measure-preserving transformation, the measure of strips
(
measurable) is preserved;
then has to be a measure-preserving transformation. Also the measure of strips
(
measurable) is preserved, and it follows that
almost everywhere. So
.
Finally, if , and if then and .
The quotient
can be identified with
as was claimed in the theorem.
N() versus
In section, we have shown that the tori converge to . In fact more is true.
Theorem 8. The normalizers of also converge to N(.
Proof First of all, let us show that the normalizers of
can be identified with a subgroup of N(
. We know from (
1) that
With the element of the normalizer of , we associate the map , which permutes the spherical segments followed by the action of t on these spherical segments.
Theorem 7 tells us that a measure-preserving transformation
is an element of the normalizer of
if it can be written as
. In the local chart
,
can be written as
where
is a measure-preserving transformation of the unit interval and
a measurable function. Now, we can use Theorem 3 to approximate
via symmetric permutations and also approximate
via step functions. In other words, there exists a sequence of permutations
and a sequence of step functions
such that
and
.
set . It follows, then, that converges to
□
In conclusion, we think that these results can be extended to a maximal torus of symplectomorphisms on toric variety. Our next project will investigate how the Cartan subalgebra of the infinite-dimensional torus characterizes the adjoint representation defined by the Poisson bracket on functions.