Abstract
This paper investigates the stability of the iterative algorithm applied to strongly pseudocontractive mappings within the context of uniformly convex Banach spaces. The study leverages both analytic and numerical methods to demonstrate the convergence and stability of the algorithm. In comparison to previous works, where weak-contraction mappings were utilized, the strongly pseudocontractive mappings used in this study preserve the convergence property, exhibit greater stability, and have broader applicability in optimization and fixed point theory. Additionally, this work shows that the type of mapping employed converges faster than those in earlier studies. The results are applied to a mixed-type Volterra–Fredholm nonlinear integral equation, and numerical examples are provided to validate the theoretical findings. Key contributions of this work include the following: (i) the use of strongly pseudocontractive mappings, which offer a more stable and efficient convergence rate compared to weak-contraction mappings; (ii) the application of the algorithm to a wider range of problems; and (iii) the proposal of future directions for improving convergence rates and exploring the algorithm’s behavior in Hilbert and reflexive Banach spaces.
MSC:
65K15; 47J25; 65J15; 90C33
1. Introduction
Throughout this work, X denotes a real Banach space, and Z represents the set of non-negative integers. is the domain of the self-mapping H, while refers to the fixed point set of H.
The mapping H is said to be as follows:
- Lipschitzian with constant L if for , the following inequality holds for all :Here, L is a constant that satisfies .
- Contractive if in inequality (1), .
- Nonexpansive if in inequality (1), .
Definition 1
([1]). A mapping H is said to be k-strongly pseudocontractive if there exists a constant such that
for all and for all .
Remark 1.
Remark 2.
From the inequality (1), Bogin [3] obtained the following inequality:
or
and the mapping H is said to be strongly pseudocontractive for some .
Remark 3.
A strongly pseudocontractive mapping is said to be a strongly ϕ-pseudocontractive mapping, given ϕ defined as for where the converse is not required to be true.
Definition 2.
A mapping H is said to be strongly ϕ-pseudocontractive ∀ where there exists and there is a strictly increasing function with such that
Remark 4.
A strongly ϕ-pseudocontractive mapping is said to be generalized strongly Φ-pseudocontractive mapping with defined by where the converse is not needed to be true.
Definition 3.
A mapping H is said to be generalized strongly Φ-pseudocontractive ∀ , having and a strictly increasing function with such that
Definition 4
([4]). Let H be a self-mapping on a subset of a Banach space Z with a fixed point p and be an arbitrary sequence in K. Then, an iterative scheme for some function f, converging to a fixed point p, is said to be H-stable or stable with respect to H if for
if and only if .
The stability results of various iterative schemes for several classes of nonlinear mappings have been identified and studied by many researchers. Among them is Ostrowski [4] who introduced the concept of stability for a fixed point iterative scheme and proved that Picard’s iterative scheme is stable with respect to contraction mappings. The theorem is as follows:
Theorem 1
([4]). Let be an arbitrary point in Z. Suppose is a sequence in Z which satisfies
For , , is a sequence in Z; then,
where are sequences in a real Banach space Z and , where k is a real sequence in satisfying the following conditions:
- (c1.)
- ;
- (c2.)
- , ;
- (c3.)
- , ;
- (c4.)
- .
Then,
- (i)
- the sequence is almost H-stable
- (ii)
- implies
Harder and Hicks [5] extended the work of Ostrowski [4] for more general iterative schemes with contractive conditions. In the process of estimating fixed points, the authors considered an estimated sequence instead of the theoretical sequence due to rounding errors and numerical estimation of functions. The authors stated the stability of an iterative scheme as follows:
Theorem 2
([5]). Let be a complete metric space and be a mapping. Then, given that is the set of fixed points of H, let be the sequence generated by an iterative scheme which is defined by
where is the first estimation and f is some function. Considering that the sequence converges to a fixed point p of H, then, setting ∀ shows that the iterative scheme is H-stable if and only if
Also, Ajibade et al [6] obtained the convergence and stability of the Ishikawa iterative process for a class of -quasinonexpansive mappings. Recently, Ali and Ali [7] constructed a new two-step iterative algorithm, known as iteration to estimate the fixed points of weak contractions in Banach spaces as given below:
The authors proved that the sequence of the proposed algorithm converges strongly to a fixed point of weak contractions. The iterative scheme is also shown to be almost stable for weak contractions and converges to a fixed point faster than Picard, Mann, Ishikawa, S, normal-S and Varat iterative schemes. A data dependence result was obtained using the iteration, and numerical examples were presented to validate the results. Furthermore, the results were also used to estimate the solution of the nonlinear quadratic Volterra integral equation. Finally, in the work, an open question arose thus—“can the sequence generated by iterative scheme converge to a fixed point of nonexpansive or pseudocontractive mappings?” In response to the question, Ajibade et al. [8] showed that the sequence generated by the iterative algorithm (5) converges strongly to a fixed point of a strongly pseudocontractive mapping in the framework of uniformly convex Banach spaces.
In addition, Gursoy [9] studied a mixed Volterra–Fredholm nonlinear integral equation and utilized it via a normal S-iterative scheme to show that the iterative sequence generated converges to a solution of its integral equation. Subsequently, Ali et al. [10] studied Picard’s three-step iterative scheme for the estimation of fixed points of Zamfirescu mappings in an arbitrary Banach space. The authors proved that Picard’s three-step iterative scheme was almost H-stable and converged faster than Picard, Mann, Ishikawa, Noor, S, normal S and other existing iterative schemes. Lastly, they applied the result to estimate the solution of a mixed Volterra–Fredholm nonlinear integral equation. More recently, Alshehri et al. [11] examined the iterative scheme and estimated the fixed points of a nonlinear mapping which satisfies a condition in uniformly convex Banach spaces. Thereafter, weak and strong convergence results were obtained. The authors also highlighted that the iterative scheme is weakly -stable with respect to most contractions, and at the end of their main results, a numerical example was given to show that the iterative scheme is more effective in its convergence than some existing iterative schemes. As part of its application, the iterative scheme was employed to approximate the solution of a mixed Volterra–Fredholm nonlinear integral equation (see also [12,13]). Several investigations were also conducted by researchers in the literature on the iterative scheme (see [14,15,16,17,18,19,20,21]). The mixed Volterra–Fredholm nonlinear integral equation which was first introduced by Cracium and Serban [22] is given as follows:
Motivated by the works of [7,8,9], we investigate the stability of the iterative algorithm on a strongly pseudocontractive mapping in the framework of uniformly convex Banach space. The result is obtained via numerical and analytic methods (see [23,24,25,26,27,28,29,30,31]). The applicability of the result is shown on a mixed-type Volterra–Fredholm nonlinear integral equation. Finally, a numerical example is given. Some of the novel contributions of this work are as follows:
- (i)
- In [7], the authors used weak-contraction mapping to obtain the result, while in this work, we utilized strongly pseudocontractive mapping which preserves the convergence property, is more stable, and has wider applicability in optimization and fixed point theory.
- (ii)
- The type of map used in this work converges faster than the maps used in the previous works (see [7,8,9]).
In Section 1, an overview of previous works in this research direction is considered. Basic definitions, remarks, and results are given. In Section 2, useful lemmas necessary for proving our result are presented. In Section 3, the main results are presented. In Section 4, the applicability of our result is shown. Section 5 contains a numerical example that validates the main result. The last section contains concluding remarks and recommendations.
2. Preliminaries
Useful lemmas necessary to prove our main results are presented in this section as follows:
Lemma 1.
Let be the normalized duality mapping, then
for all where .
Lemma 2.
If is a non-negative real sequence satisfying
where , , and , then as .
3. Main Results
To show the stability of the iterative scheme using strongly pseudocontractive mapping in a uniformly convex Banach space, we prove the following theorem:
Theorem 3.
Let Z be a uniformly Banach space and be a strongly pseudocontractive mapping with a bounded set and with . Let be a real sequence in satisfying the following conditions:
Let be an arbitrary point in Z with , a sequence in Z. Assume that is a sequence in Z which satisfies the iterative scheme
Then,
- (i)
- .
- (ii)
- The sequence is almost H-stable.
Proof.
(i) Let , where
Then, using some arithmetic and the conditions of the theorem, we obtain the following:
Thus, the theorem follows in the first part.
(ii) To show that the sequence is bounded, we have
where
On the other hand,
From (i) and (ii), we have
Since H is strongly pseudocontractive,
Using the above inequality in (iii), we obtain
Now, we show that the following sequence
converges as By the condition of the theorem and because and are a bounded sequence in Z,
Z is a uniformly smooth Banach space and j is uniformly continuous on any bounded subset of Z. Thus, we have
which makes . Using the above conditions in (iv), we have
by choosing a large positive N, such that for all and , , the inequality (v) above yields
Therefore, by setting and ,
By using Lemma 2, we have and . On taking the limit of both sides and thus, implies that as . Hence, the sequence generated by the iterative scheme is almost H-stable. □
4. Application
In this aspect, the solution of a mixed Volterra–Fredholm nonlinear integral equation was approximated using the iterative scheme (6).
The mixed Volterra–Fredholm nonlinear integral equation is given as follows:
where is an interval in , , , continuous functions and .
Considering that the following conditions are satisfied:
;
;
there exist non-negative constants , , and such that
for all , ,
there exist non-negative constants and such that
for all .
. By the solution of problem , we mean a function .
Theorem 4.
Assume that conditions – are satisfied. Then, a unique solution for Theorem 3 exists for . Therefore, using the iterative Scheme in Equation (6), we prove the following main result.
Theorem 5.
Let be a Banach space with Chebyshev’s norm. An operator with as a sequence defined by the iterative scheme in Equation is given as
where and T are defined as above. Considering that conditions – are satisfied, Theorem 3 exists and the iterative scheme in Equation (6) converges to a unique solution .
Proof.
Firstly, we need to show the kind of mapping to be defined by H.
implying
Applying assumption we have
Moreover, Equation (10) can be written as follows:
by setting
Thus,
Hence, this shows that the operator defined by H is a strongly pseudocontractive mapping. As stated in Theorem (3), we consider that is the fixed point of H. So, we show that as . Inserting iterative scheme (6), Equation (10) and conditions –, we have
This implies that
Similarly, we have
Thus, it implies that
This implies that
Substituting (13) into (14) gives
Substituting (12) into (15),
Applying assumption , we have
Also,
So,
Thus, it follows by induction that
Since for all , using assumption gives
Accepting the fact that , ∀ where Equation is rewritten as
Taking the on both sides yields , which implies . Hence, (6) converges strongly to a unique solution of the mixed-type Volterra–Fredholm nonlinear integral Equation (9). □
5. Numerical Example
Example 1.
On taking the on both sides, we have . Hence, the iterative algorithm is H-stable.

Let and consider the mapping . Now, . Hence, we claim that the iteration algorithm is stable. Let us consider and the control sequence , then .
- Solution:
- Iterative Test:
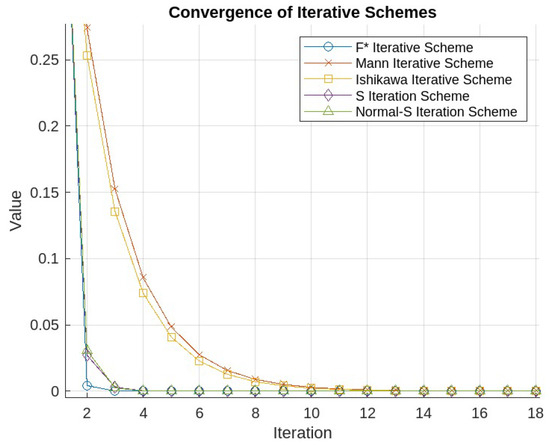
The iterative scheme converged in 4 iterations to 0.0000001. The Mann iterative scheme converged in 23 iterations to 0.000002. The Ishikawa iterative scheme converged in 23 iterations to 0.000001. The S iteration scheme converged in 7 iterations to 0.0000000. In Table 1, we present the different iterative schemes values for the first 25 steps and in Figure 1, we showed the convergence of the different iterative schemes.
Table 1.
A comparison of different iterative schemes.
Figure 1.
Convergence of the different iterative schemes.
6. Conclusions
In conclusion, iterative algorithm has been proved to be stable for a strongly pseudocontractive mapping on a uniformly convex Banach space. The applicability of the result is shown on a mixed-type Volterra–Fredholm nonlinear integral equation, and an example is also given which validates the result. Meanwhile, as an open problem, we pose the following questions:
- (i)
- Can the sequence generated by iterative algorithm converge to a fixed point of strictly pseudocontractive mapping under a suitable condition unlike the strongly pseudocontractive mapping proved in this work?
- (ii)
- Can a researcher construct an iterative algorithm that converges faster than iterative algorithm and also prove the stability of the algorithm?
- (iii)
- Can an investigation be carried out on both Hilbert and reflexive Banach spaces?
Author Contributions
Conceptualization, T.P.F., F.M.N., H.J., F.D.A. and J.A.; Methodology, T.P.F., F.M.N., H.J., F.D.A. and J.A.; Validation, T.P.F., F.M.N., H.J., F.D.A. and J.A.; Formal analysis, T.P.F., F.M.N., H.J., F.D.A. and J.A.; Investigation, T.P.F., F.M.N., H.J., K.O., F.D.A. and J.A.; Resources, K.O.; Writing—original draft, T.P.F., F.M.N., H.J., F.D.A. and J.A.; Writing—review & editing, T.P.F., F.M.N., H.J., K.O., F.D.A. and J.A.; Supervision, F.M.N., H.J. and K.O.; Project administration, F.M.N. and H.J.; Funding acquisition, K.O. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
The original contributions presented in the study are included in the article, further inquiries can be directed to the corresponding author.
Acknowledgments
The authors appreciate the Black in Mathematics Association (BMA) for providing the collaborative platform to carry out this research.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Nkwuda, F.M.; Oguntuase, J.A.; Abass, H.A.; Aphane, M. Approximating solution of system of variational inequality constrained split common fixed point problem in Hilbert spaces. Asia Pac. J. Math. 2024, 11, 57. [Google Scholar] [CrossRef]
- Kato, T. Nonlinear semigroup and evolution equations. J. Math. Soc. Jpn. 1967, 19, 508–520.1. [Google Scholar] [CrossRef]
- Bogin, J. On Strict Pseudocontractive and a Fixed Point Theorem; Technion Preprint MT-29; Haifa, Israel, 1974. [Google Scholar]
- Ostrowski, A.M. The round—Off stability of iterations. Z. Angew. Math. Mech. 1967, 47, 77–81. [Google Scholar] [CrossRef]
- Harder, A.M.; Hicks, T.L. Stability results for fixed point Procedures. Math. Jpn. 1988, 33, 693–706. [Google Scholar]
- Ajibade, F.D.; Akinbo, G.; Ajisope, M.O.; Fatai, M.O. Convergence and stability of the Ishikawa iterative process for a class of ϕ-quasinonexpansive mappings. Afr. Sci. Rep. 2022, 1, 73–80. [Google Scholar]
- Ali, F.; Ali, J. Convergence, stability, and data dependence of a new iterative algorithm with an application. J. Comp. Appl. Math. 2020, 39, 267. [Google Scholar] [CrossRef]
- Ajibade, F.D.; Nkwuda, F.M.; Joshua, H.; Fajusigbe, T.P.; Oshinubi, K. Investigation of the F* Algorithm on Strong Pseudocontractive Mappings and Its Application. Axioms 2023, 12, 1041. [Google Scholar] [CrossRef]
- Gursoy, F. Application of normal S—Iterative method to a nonlinear integral equation. Sci. World J. 2014, 2014, 943127. [Google Scholar] [CrossRef][Green Version]
- Ali, F.; Ali, J.; Rodriguez-Lopez, R. Approximation of fixed points and the solution of a nonlinear integral equation. Nonlinear Funct. Anal. Appl. 2021, 26, 869–885. [Google Scholar]
- Delves, L.M.; Mohamed, J.L. Computational Methods for Integral Equation; Cambridge University Press: Cambridge, MA, USA, 1985. [Google Scholar]
- Brunner, H.; van Houwen, P.J. The Numerical Solution of Volterra Equations; CWI Monographs; North-Holland: Amsterdam, The Netherlands, 1986; Volume 3. [Google Scholar]
- Alshehri, M.G.; Khan, F.A.; Ali, F. An iterative algorithm to approximate fixed points of nonlinear operators with application. Mathematics 2022, 10, 1132. [Google Scholar] [CrossRef]
- Bing, T.; Qin, X. Modified inertial projection and contraction algorithms for solving variational inequality problems with non-Lipschitz continuous operators. Anal. Math. Phys. 2022, 12, 26. [Google Scholar]
- Yanlai, S.; Bazighifan, O. Two Regularization Methods for the Variational Inequality Problem over the Set of Solutions of the Generalized Mixed Equilibrium Problem. Mathematics 2022, 10, 2981. [Google Scholar] [CrossRef]
- Yanlai, S. An efficient radial basis function generated finite difference meshfree scheme to price multi-dimensional PDEs in financial options. J. Comput. Appl. Math. 2024, 436, 115382. [Google Scholar]
- Jenber, D.; Zegeye, H.; Takele, M.H.; Tufa, A.R. Strong convergence theorems for a solution of split common fixed point problem involving λ-strict quasi-Gf-pseudocontractive mappings in Banach spaces. J. Math. Comput. Sci. 2023, 30, 173–189. [Google Scholar]
- Gunasekar, T.; Raghavendran, P.; Santra, S.S.; Sajid, M. Analyzing existence, uniqueness, and stability of neutral fractional Volterra-Fredholm integro-differential equations. J. Math. Comput. Sci. 2024, 33, 390–407. [Google Scholar] [CrossRef]
- Stevic, S. Stability of a new iteration method for strongly pseudocontractive mappings. Demonstr. Math. J. 2003, 50, 71–85. [Google Scholar]
- Chidume, C.E. Approximation of fixed points of strongly pseudocontractive mappings. Proc. Am. Math. Soc. 1994, 120, 545–551. [Google Scholar] [CrossRef]
- Osilike, M.O. Stability of the Mann and Ishikawa iteration procedures for ϕ—strongly pseudocontractions and nonlinear equations of the ϕ-strongly accretive type. J. Math. Anal. Appl. 1998, 227, 319–334. [Google Scholar] [CrossRef]
- Cracium, C.; Serban, M.A. A nonlinear integral equation via Picard operators. Fixed Point Theory 2011, 12, 57–70. [Google Scholar]
- Agrawal, R.P.; O’Regan, D.; Sahu, D.R. Iterative construction of fixed points of nearly asymtotically nonexpansive mappings. J. Nonlinear. Convex. Anal. 2007, 8, 61–79. [Google Scholar]
- Srivastava, S.C.; Biswas, S. History, development and application of pseudocontractive mapping with fixed point theory. Int. J. Math. Trends -Technol.-IJMTT 2020, 66, 2231–5373. [Google Scholar]
- Mann, W.R. Mean value methods in iteration. Proc. Am. Math. Soc. 1953, 4, 506–510. [Google Scholar] [CrossRef]
- Ishikawa, S. Fixed points by a new iteration method. Proc. Am. Math. Soc. 1974, 44, 147–150. [Google Scholar] [CrossRef]
- Stevic, S. Approximating fixed points of nonexpansive mappings by a new iteration method. Proc. Am. Math. Soc. 2006, 1, 437–450. [Google Scholar]
- Stevic, S. Approximating fixed points of strongly pseudocontractive mappings by a new iteration method. Appl. Anal. 2005, 84, 89–102. [Google Scholar] [CrossRef]
- Stevic, S. On stability results for a new approximating fixed points iteration process. Demonstr. Math. 2001, 34, 873–880. [Google Scholar] [CrossRef]
- Deimling, K. Zeros of accretive operators. Manuscripts Math. 1975, 13, 399–414. [Google Scholar] [CrossRef]
- Banas, J.; Sadarangani, K. Monotonicity properties of the superposition operator and their applications. J. Math. Anal. Appl. 2008, 340, 1385–1394. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).