
Finite-Time Mass Estimation Using ℋ∞ and Sliding Mode Control for a Multicopter



Abstract
1. Introduction
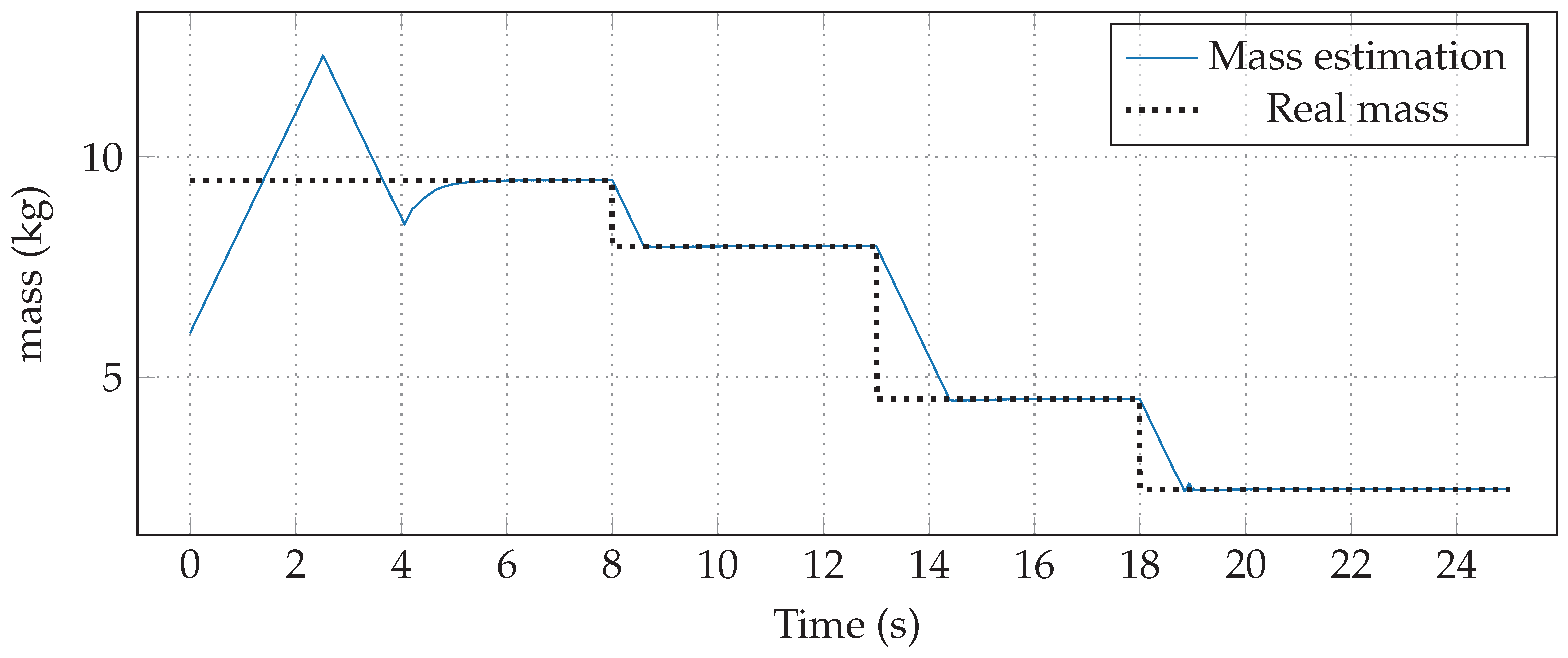
- The exact adaptation of the mass despite additive perturbations without the need for additional sensors;
- The inclusion of an estimator of state-dependent functions as part of the aircraft rotational dynamics,
2. Background and Preliminaries
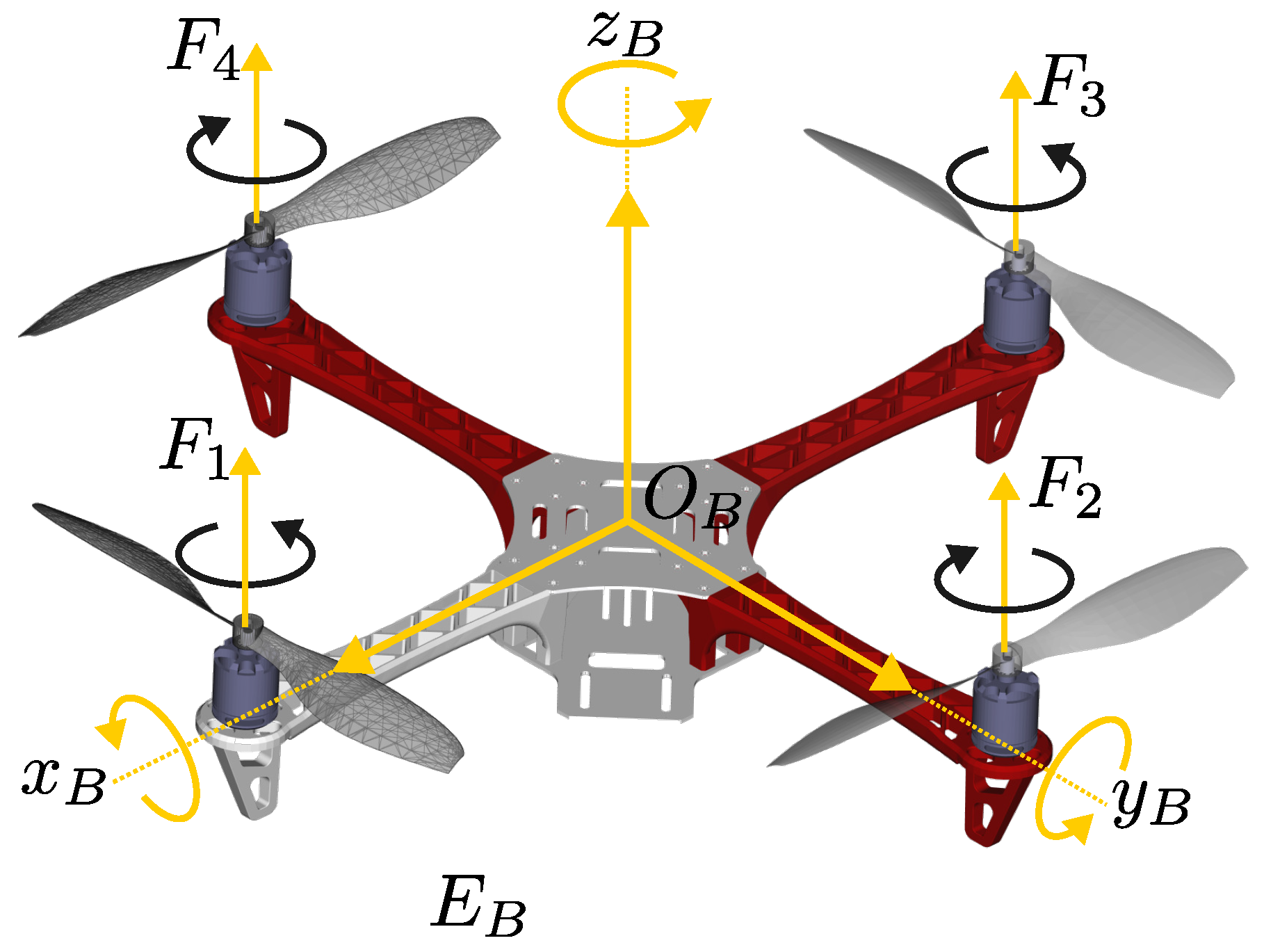
3. Dynamic Model
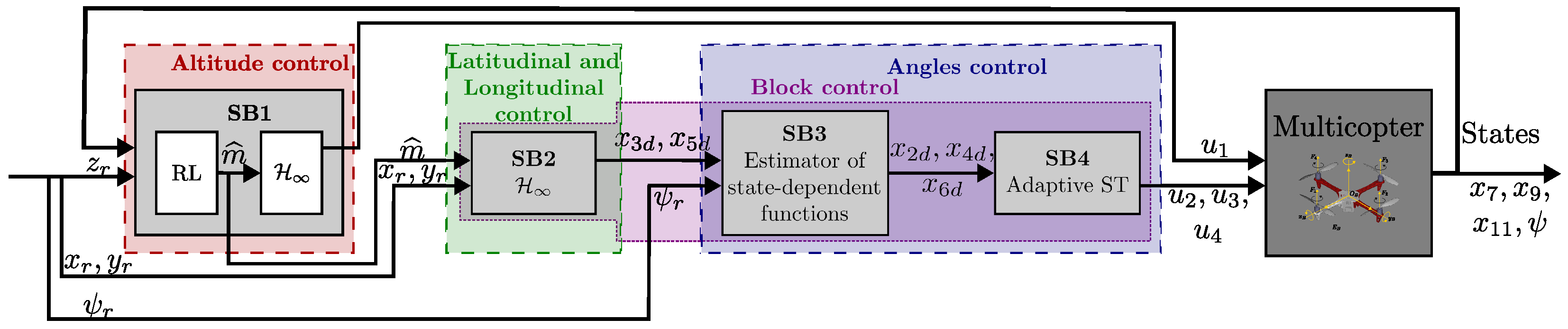
4. Control
4.1. Altitude Control
4.2. Latitudinal, Longitudinal, and Yaw Control
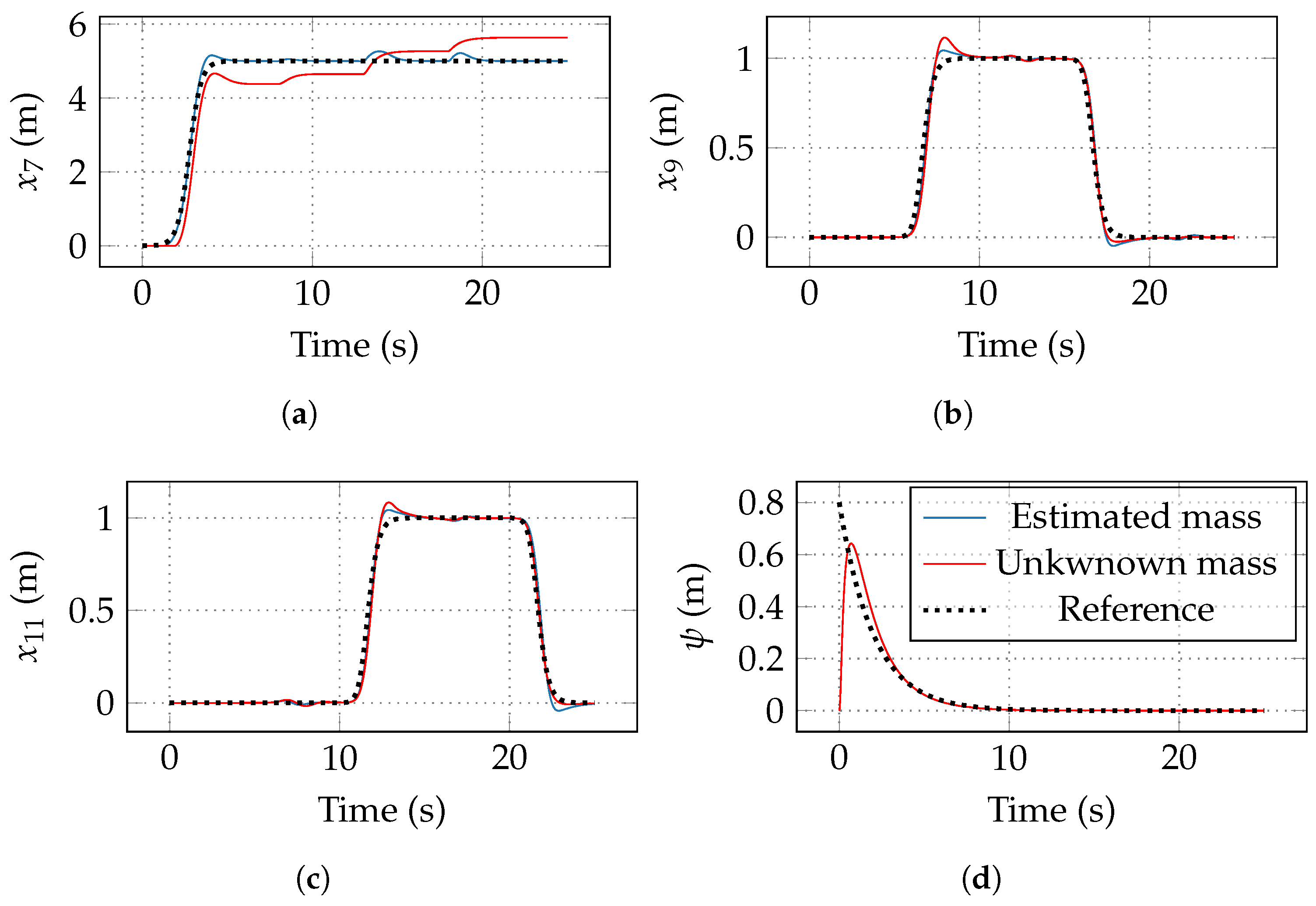
5. Simulation Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Silva, L.A.; Leithardt, V.R.Q.; Batista, V.F.L.; Villarrubia González, G.; De Paz Santana, J.F. Automated Road Damage Detection Using UAV Images and Deep Learning Techniques. IEEE Access 2023, 11, 62918–62931. [Google Scholar] [CrossRef]
- Sun, Y.; Shao, Z.; Cheng, G.; Huang, X.; Wang, Z. Road and Car Extraction Using UAV Images via Efficient Dual Contextual Parsing Network. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–13. [Google Scholar] [CrossRef]
- Cheng, L.; Zhong, L.; Tian, S.; Xing, J. Task Assignment Algorithm for Road Patrol by Multiple UAVs With Multiple Bases and Rechargeable Endurance. IEEE Access 2019, 7, 144381–144397. [Google Scholar] [CrossRef]
- Pan, Y.; Zhang, X.; Cervone, G.; Yang, L. Detection of Asphalt Pavement Potholes and Cracks Based on the Unmanned Aerial Vehicle Multispectral Imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 3701–3712. [Google Scholar] [CrossRef]
- Sun, Y.; Abeywickrama, S.; Jayasinghe, L.; Yuen, C.; Chen, J.; Zhang, M. Micro-Doppler Signature-Based Detection, Classification, and Localization of Small UAV With Long Short-Term Memory Neural Network. IEEE Trans. Geosci. Remote Sens. 2021, 59, 6285–6300. [Google Scholar] [CrossRef]
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned Aerial Vehicles (UAVs): A Survey on Civil Applications and Key Research Challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Khosravi, M.R.; Samadi, S. Mobile multimedia computing in cyber-physical surveillance services through UAV-borne Video-SAR: A taxonomy of intelligent data processing for IoMT-enabled radar sensor networks. Tsinghua Sci. Technol. 2022, 27, 288–302. [Google Scholar] [CrossRef]
- Shao, Z.; Cheng, G.; Ma, J.; Wang, Z.; Wang, J.; Li, D. Real-Time and Accurate UAV Pedestrian Detection for Social Distancing Monitoring in COVID-19 Pandemic. IEEE Trans. Multimed. 2022, 24, 2069–2083. [Google Scholar] [CrossRef]
- Yang, L.; Fan, J.; Liu, Y.; Li, E.; Peng, J.; Liang, Z. A Review on State-of-the-Art Power Line Inspection Techniques. IEEE Trans. Instrum. Meas. 2020, 69, 9350–9365. [Google Scholar] [CrossRef]
- Quater, P.B.; Grimaccia, F.; Leva, S.; Mussetta, M.; Aghaei, M. Light Unmanned Aerial Vehicles (UAVs) for Cooperative Inspection of PV Plants. IEEE J. Photovolt. 2014, 4, 1107–1113. [Google Scholar] [CrossRef]
- Sadykova, D.; Pernebayeva, D.; Bagheri, M.; James, A. IN-YOLO: Real-Time Detection of Outdoor High Voltage Insulators Using UAV Imaging. IEEE Trans. Power Deliv. 2020, 35, 1599–1601. [Google Scholar] [CrossRef]
- Tang, S.; Wüest, V.; Kumar, V. Aggressive Flight With Suspended Payloads Using Vision-Based Control. IEEE Robot. Autom. Lett. 2018, 3, 1152–1159. [Google Scholar] [CrossRef]
- Xian, B.; Wang, S.; Yang, S. An Online Trajectory Planning Approach for a Quadrotor UAV With a Slung Payload. IEEE Trans. Ind. Electron. 2020, 67, 6669–6678. [Google Scholar] [CrossRef]
- Du, Z.H.; Wu, H.N.; Feng, S. Boundary Control of a Quadrotor UAV with a Payload Connected by a Flexible Cable. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 1151–1156. [Google Scholar] [CrossRef]
- Pereira, P.O.; Dimarogonas, D.V. Control framework for slung load transportation with two aerial vehicles. In Proceedings of the 2017 IEEE 56th Annual Conference on Decision and Control (CDC), Melbourne, Australia, 12–15 December 2017; pp. 4254–4259. [Google Scholar] [CrossRef]
- Ariyibi, S.; Tekinalp, O. Control of a Quadrotor Formation Carrying a Slung Load Using Flexible Bars. In Proceedings of the AIAA Aviation 2019 Forum, Dallas, TX, USA, 17–21 June 2019. [Google Scholar] [CrossRef]
- Yu, G.; Cabecinhas, D.; Cunha, R.; Silvestre, C. Nonlinear Backstepping Control of a Quadrotor-Slung Load System. IEEE/ASME Trans. Mechatron. 2019, 24, 2304–2315. [Google Scholar] [CrossRef]
- Wu, C.; Fu, Z.; Yang, J.; Wei, Y. Nonlinear control and analysis of a quadrotor with sling load in path tracking. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017; pp. 6519–6524. [Google Scholar] [CrossRef]
- BBVA.Drones: Los Aliados de la Agricultura de Precisión y la Industria Alimentaria. 2023. Available online: https://www.bbva.com/es/sostenibilidad/drones-los-aliados-de-la-agricultura-de-precision-y-la-industria-alimentaria/ (accessed on 12 September 2024).
- IWATA. Yamaha Motor Signs to Collaborate with Australian AgTech Company, the Yield, for Smart Agricultural Solutions—Toward Labor Saving, Efficiency Improvements, and Optimization through Partnerships with Agricultural Startups. 2021. Available online: https://global.yamaha-motor.com/news/2021/0609/corporate.html (accessed on 12 September 2024).
- Staff Amazon. Amazon Announces 8 Innovations to Better Deliver for Customers, Support Employees, and Give Back to Communities Around the World. 2023. Available online: https://www.aboutamazon.com/news/operations/amazon-delivering-the-future-2023-announcements (accessed on 12 September 2024).
- Stephan, F.; Reinsperger, N.; Grünthal, M.; Paulicke, D.; Jahn, P. Human drone interaction in delivery of medical supplies: A scoping review of experimental studies. PLoS ONE 2022, 17, e0267664. [Google Scholar] [CrossRef]
- Al-Rawashdeh, Y.M.; Elshafei, M.; Ouakad, H.M. In-flight estimation of quadrotor mass and inertia using all-accelerometer. J. Vib. Control 2023, 30, 3034–3047. [Google Scholar] [CrossRef]
- Wong, T.L.; Khan, R.R.; Lee, D. Model Linearization and H∞ Controller Design for a Quadrotor Unmanned Air Vehicle: Simulation Study. In Proceedings of the 13th International Conference on Control, Automation, Robotics and Vision, Singapore, 10–12 December 2014. [Google Scholar]
- Arellano-Muro, C.A.; Luque-Vega, L.F.; Castillo-Toledo, B.; Loukianov, A.G. Backstepping Control with Sliding Mode Estimaton for a Hexacopter. In Proceedings of the 10th International Conference on Electrical Engineering, Computing Science and Automatic Control (CCE), Mexico City, Mexico, 30 September–4 October 2013. [Google Scholar]
- Benallegue, A.; Mokhtari, A.; Fridman, L. Feedback linearization and high order sliding mode observer for a quadrotor UAV. In Proceedings of the Variable Structure Systems, VSS’06, International Workshop on IEEE, Alghero, Italy, 5–7 June 2006; pp. 365–372. [Google Scholar]
- Siciliano, B.; Sciavicco, L.; Luigi Villani, G.O. Robotics Modelling, Planing and Control; Springer: London, UK, 2009. [Google Scholar]
- Arellano-Muro, C.A.; Castillo-Toledo, B.; Loukianov, A.; Luque-Vega, L.F.; Gonzalez-Jimenez, L. Quaternion-based Trajectory Tracking Robust Control for a Quadrotor. In Proceedings of the 10th Annual System of Systems Engineering Conference 2015 (SoSE 2015), San Antonio, TX, USA, 17–20 May 2015. [Google Scholar]
- Alaimo, A.; Artale, V.; Milazzo, C.; Ricciadello, A.; Trefiletti, L. Mathematical Modeling and Control of a Hexacopter. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 28–31 May 2013. [Google Scholar]
- Gessow, A.; Myers, G.C. Aerodynamics of the Helicopter, 5th ed.; Frederick Unger Publishing Co.: New York, NY, USA, 1978. [Google Scholar]
- Marino, R.; Tomei, P. Nonlinear Control Design. Geometric, Adaptive and Robust; Prentice Hall: Saddle River, NJ, USA, 1995. [Google Scholar]
- Isidori, A.; Astolfi, A. Disturbance Attenuation and H∞-Control Via Measurement Feedback in Nonlinear Svstems. IEEE Trans. Autom. Control 1992, 1283–1293. [Google Scholar] [CrossRef]
- Levant, A. Universal single-input–single-output (SISO) sliding-mode controllers with finite time convergence. IEEE Trans. Autom. Control 2005, 46, 1785–1789. [Google Scholar] [CrossRef]
- Arellano-Muro, C.A.; Castillo-Toledo, B.; Di Gennaro, S.; Loukianov, A.G. Online Reinforcement Learning Control via Discontinuous Gradient. Int. J. Adapt. Control Signal Process. 2024, 38, 1762–1776. [Google Scholar] [CrossRef]
- Aguilar, L.; Orlov, Y.; Acho, L. Nonlinear H∞-control of nonsmooth time-varying systems with application to mechanical manipulators. Automatica 2003, 39, 1531–1542. [Google Scholar] [CrossRef]
- Loukianov, A.G.; Rivera, J.; Orlov, Y.V.; Teraoka, E.Y.M. Robust Trajectory Tracking for an Electrohydraulic Actuator. IEEE Trans. Ind. Electron. 2009, 56, 3523–3531. [Google Scholar] [CrossRef]
- Aliyu, M. Nonlinear-Control, Hamiltonian Systems and Hamilton–Jacobi Equations; CRC Press: Boca Raton, FL, USA, 2011. [Google Scholar]
- Mahapatro, S.R.; Subudhi, B.; Ghosh, S. Design and real-time implementation of an adaptive fuzzy sliding mode controller for a coupled tank system. Int. J. Numer. Model. Electron. Netw. Devices Fields 2019, 32, e2485. [Google Scholar] [CrossRef]
- Sontag, E.; Teel, A. Changing supply functions in input/state stable systems. IEEE Trans. Autom. Control 1995, 40, 1476–1478. [Google Scholar] [CrossRef]
- Khalil, H.K. Nonlinear Systems; Prentice Hall: Saddle River, NJ, USA, 2002. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Checkpoint | Load | |
|---|---|---|
| Nominal Parameter | Value | |
|---|---|---|
| m | 2.450 | |
| d |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Arellano-Muro, C.A.; Osuna-González, G.L.; Cespi, R. Finite-Time Mass Estimation Using ℋ∞ and Sliding Mode Control for a Multicopter. Mathematics 2024, 12, 3100. https://doi.org/10.3390/math12193100
Arellano-Muro CA, Osuna-González GL, Cespi R. Finite-Time Mass Estimation Using ℋ∞ and Sliding Mode Control for a Multicopter. Mathematics. 2024; 12(19):3100. https://doi.org/10.3390/math12193100
Chicago/Turabian StyleArellano-Muro, Carlos Augusto, Guillermo Luis Osuna-González, and Riccardo Cespi. 2024. "Finite-Time Mass Estimation Using ℋ∞ and Sliding Mode Control for a Multicopter" Mathematics 12, no. 19: 3100. https://doi.org/10.3390/math12193100
APA StyleArellano-Muro, C. A., Osuna-González, G. L., & Cespi, R. (2024). Finite-Time Mass Estimation Using ℋ∞ and Sliding Mode Control for a Multicopter. Mathematics, 12(19), 3100. https://doi.org/10.3390/math12193100