1. Introduction
The magnetic properties of electrical steel sheets play a crucial role in determining their performance in applications such as transformers, motors, and generators [
1]. These properties, including magnetic permeability, saturation magnetization, and hysteresis characteristics, can vary locally across the material due to the influence of different manufacturing processes. Cutting techniques are particularly important in shaping and creating the desired geometry of electrical steel sheets for various applications. However, these cutting processes can cause changes in the microstructure and residual stresses at the cut edges, leading to a deterioration in the magnetic material properties.
The extent of this deterioration depends on the specific cutting process, e.g., punching, laser cutting, or water-jet cutting and the cutting parameters that can be the laser intensity, blade sharpness, or cutting speed [
2,
3,
4]. Also, electrical discharge machining is also a well-known cutting process and probably has the least effect on material properties, but it is rarely used in industry as it is slow and expensive. Accurately and efficiently determining the local properties affected by the cut edges is a challenging task that continues to be actively explored by the scientific community.
One commonly used approach involves dividing the electrical steel sheet into multiple narrower strips, where the combined width of these strips reflects the dimensions of the original sheet. By modifying the strip width, different combinations of the cutting length to bulk material ratio can be evaluated using a single sheet tester or an Epstein frame [
5,
6].
There are both destructive and nondestructive methods for measuring the influence of cut edges, as presented by [
7,
8,
9,
10]. The destructive method involves drilling holes in the sheets and placing search coils near the cut edges to measure the magnetic flux. The nondestructive method utilizes the needle probe method. But in all cases, either the sheet is destroyed or a homogenization method is used.
Since there is no noninvasive method available that can accurately determine the local degradation of cut steel sheets, we aim to comprehensively investigate the impact of cut edges on the magnetic material properties by integrating various scientific methodologies. This involves the combination of measurement, numerical simulation, and inverse modeling techniques. This work is about an optimization of the setup before it is actually built; therefore, the entire measurement process is described in the following, but the investigations in this work are limited to the use of synthetic data based on numerical simulations. To gather measurement data, we use a sensor–actuator (SA) system to locally magnetize electrical steel sheets and measure the magnetic field above the sample. To solve the inverse problem, an appropriate model of the SA system and electrical steel sheets is set up, and the magnetostatic problem is solved by the finite element (FE) method. The parameters of the material model reflecting the degradation caused by cutting are then identified by minimizing the mismatch between the measured data and the simulated data. The first investigations on solving the inverse problem using the described method and synthetic measurement data are presented in [
11].
However, solving an ill-posed inverse problem is generally a challenging task, and obtaining the right data is crucial. Before the measurement system is actually built, studies should be carried out on the reliability and accuracy of the identification method. In fact, the number of sensors is limited and the spatial resolution is determined by their size. Thus, the aim of this study is to optimize the sensor positions in order to solve the inverse problem as accurately as possible, thereby minimizing the uncertainty of the solution (i.e., the identifiable parameters). Determining the uncertainties of an inverse problem involves, in general, calculating how measurement noise affects the parameter space.
In this study, only random, normally distributed measurement noise is considered, while the uncertainty of the model (i.e., comparing actual measurement data with simulation data to solve the inverse problem) is disregarded as only simulation data are available and biases and systematic effects are also neglected. The uncertainties can be calculated using the covariance matrix, which represents the dispersion of the identified parameters obtained from multiple independent samples of noisy measurement data and an inverse scheme.
Since the parameter identification includes solving the FE problem several times, the covariance determination for a significant number of samples is computationally highly intensive. Therefore, the Fisher information matrix (FIM) is used, which is an estimate of the inverse covariance matrix and is determined with only a few model evaluations. By definition, the FIM is the Hessian matrix of the negative log-likelihood function given some measurement data and therefore describes the curvature of the probability density of observed data as a function of the model parameters [
12]. The higher the curvature around the maximum is, the lower the variance of the parameters to be identified. Thus, the Hessian is computed using the Jacobian of the model output with respect to the identification parameters and is used to assess the parameter uncertainty. An extensive description of the relation between response surfaces and parameter uncertainties is presented in [
13]. It is worth mentioning that an identifiability analysis, which answers the question if the solution is unique, is not within the scope of this work. In our methods, the parameter uncertainty is evaluated assuming that the estimate is in the proximity of the true solution.
The Fisher information matrix (FIM) is used to calculate the parameter uncertainty for the model with the corresponding model parameters defining the sensor configuration. To minimize the resulting uncertainty, a design of experiment optimization is applied. This means that the parameter variances of the FIM form the single objective function of the model optimization with different approaches to describing optimality. D-, A-, and E-optimality are distinguished, evaluating either the determinant, trace, or eigenvalues of the FIM, thus defining different objectives for the underlying problem. In this work, different objectives are tested and compared to find an optimal sensor placement.
In the literature, similar methods for finding an optimal design of experiment for the purpose of accurately identifying model parameters and by using the information provided by the FIM are used for different fields of applications. For instance, in [
14], an optimal design for the estimation of the parameters of an electronic chip cooling system is found. In the field of structural health monitoring, where changes to the material and geometric properties of engineering structures such as bridges and buildings are monitored, an optimal sensor placement is crucial, and therefore, corresponding works can be found in [
15,
16].
This paper is structured as follows.
Section 2 describes the concept of the measurement setup and the computational model of the sensor–actuator system. In
Section 3, the parameter identification problem is introduced and the Fisher information matrix and its relation to the parameter uncertainty is shown. Also, the concept of the Cramér–Rao Bound describing the lower bound of the variance of a parameter estimator is explained in this section. The setup for optimizing the sensor placement is described in
Section 4, which incorporates also the formulation of different objective functions. Lastly,
Section 5 presents the results containing a sensitivity analysis and optimized sensor positions using different objective functions.
2. Sensor–Actuator System
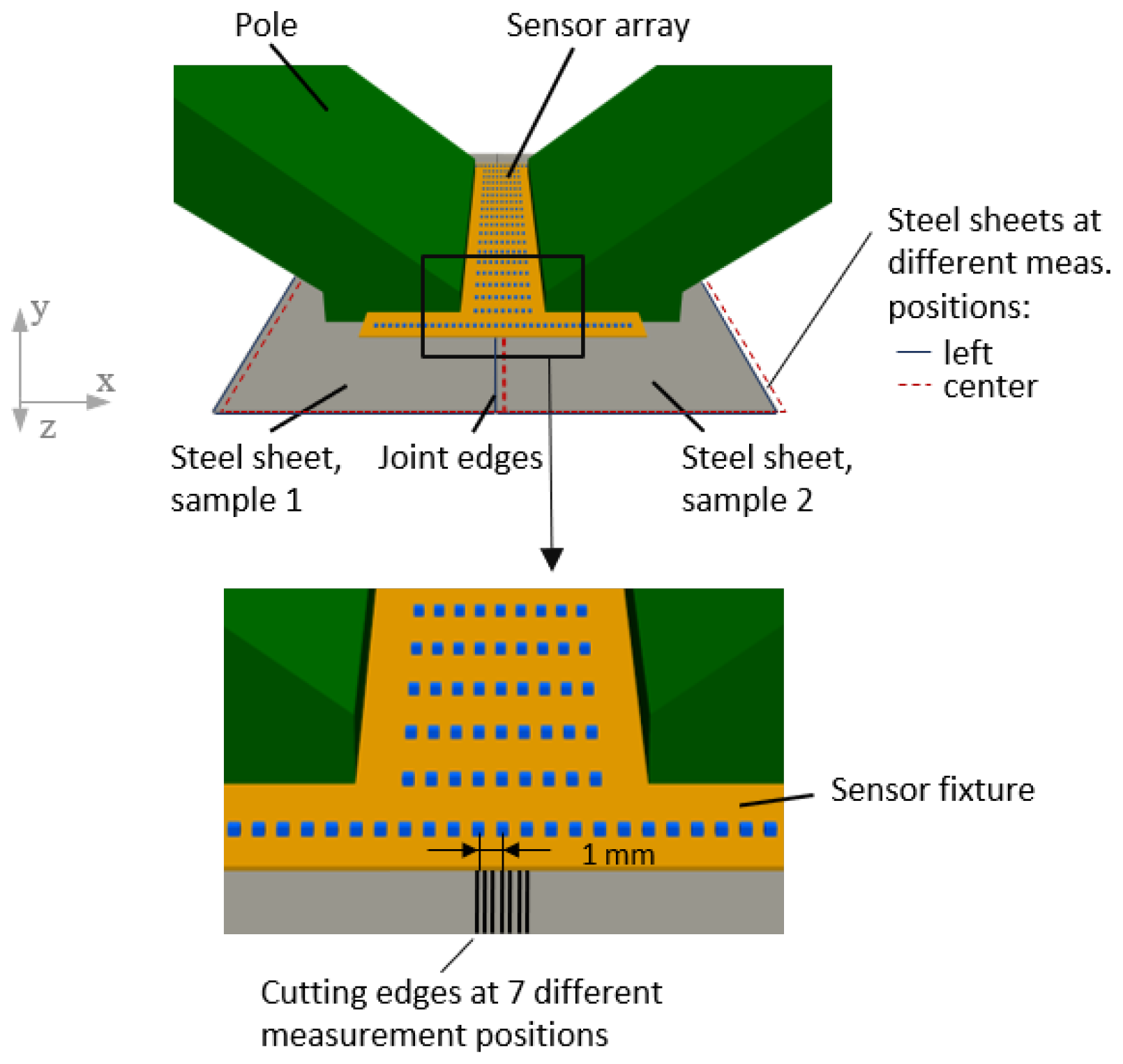
The model of the sensor–actuator system is shown in
Figure 1 and consists of an iron core, excitation coils which generate a magnetic field, two steel sheet samples, and a sensor array.
The x-, y-, and z-components of the magnetic field are measured above the steel sheet samples and depend on the distribution of the magnetic permeability of the material. To ensure a sufficient sensitivity of the magnetic field changes due to material inhomogeneity, two samples are placed close to each other along the cut edge [
11]. Assuming that both samples come from the same batch and adhere to identical cutting process parameters, it is reasonable to consider their material behavior as identical.
The magnetic field is captured by
sensors, which are fixed to the sensor–actuator system. In order to increase the amount of data and thus improve the information gain and accuracy, the sensor–actuator system is positioned at
different locations along the
x direction, which means orthogonal to the cutting edge or the interface of sample 1 and 2, see
Figure 2. This enables a higher resolution in the area of the cut edge, which cannot be achieved with the use of additional sensors due to their minimal size. Thus,
data points are collected in a measurement series. To ensure consistency, the sheets will be demagnetized between each measurement position to eliminate any residual magnetism. This assumption is crucial for subsequent numerical simulations.
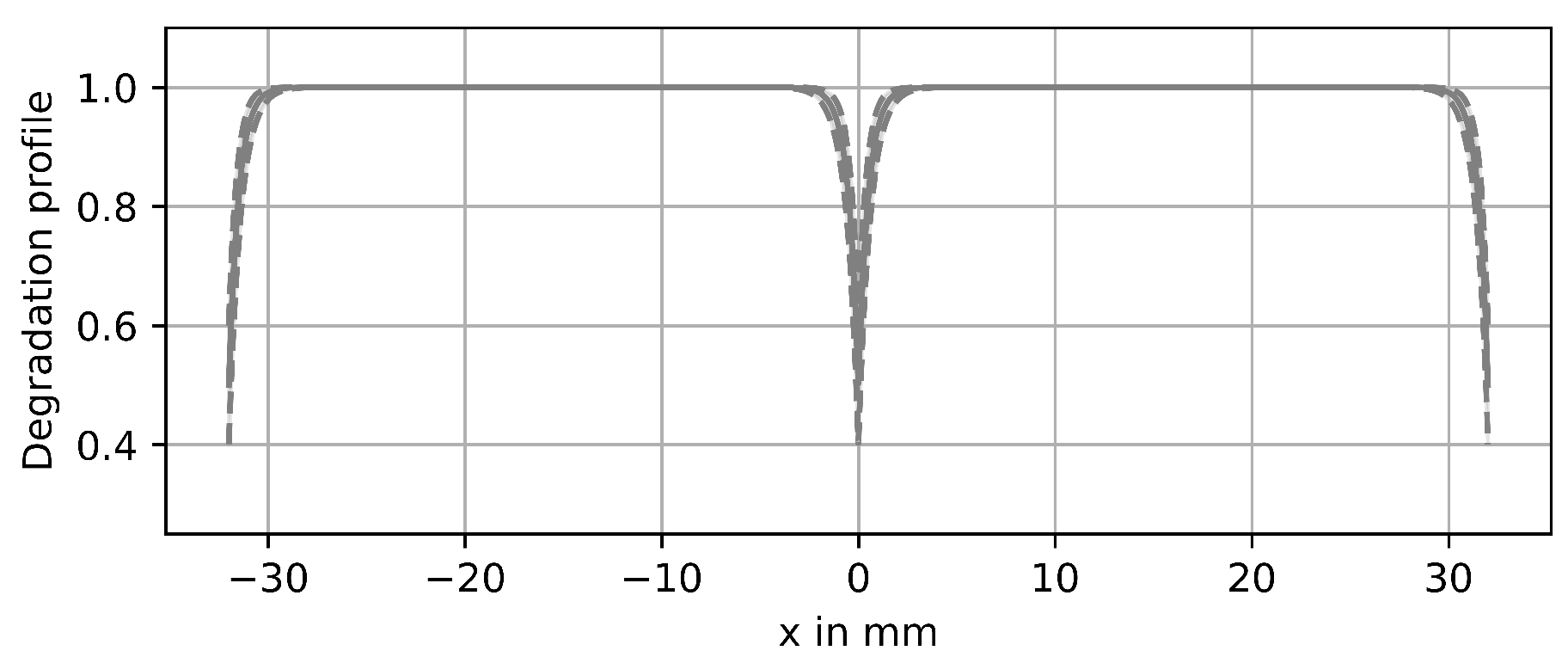
The degradation profile of steel due to punching is taken from the literature [
17]. It follows an exponential function, where the unknowns are the initial value
at the cut edge and the degradation skin depth
,
Figure 3 shows the degradation profiles of two cut and juxtaposed samples produced from two different steel sheets with a width of
.
Thus, the permeability distribution starts at the cut edge at
and saturates to a constant permeability
,
In the FE model, the two samples are modeled as a single sheet with the material model, as shown in
Figure 3.
The magnetostatic field is computed by the finite element method (FEM) solving the following partial differential equation (PDE):
for the magnetic vector potential
with a given electric current density
. Having solved the PDE, the magnetic field
at all sensor positions can be computed by
The computational domain is discretized by 40,084 tetrahedral elements, and the FEM solution is obtained by the open-source software openCFS, version 24.03 [
18]. For the excitation, a current density of
is assigned. The magnetic material model is assumed to be linear in this work.
3. Parameter Identification and Uncertainty
Parameter identification is the process of adjusting model parameters until the model output matches the observed or measured data. This process typically includes conducting numerical optimization techniques, such as least squares fitting or maximum likelihood estimation, while using real measured data. Since, in this work, the sensitivity of the measurement system should be improved and it is not the aim to actually identify the parameters, simulated data are used for the measurements instead of real data.
The likelihood for an identification parameter state
given
n measurements taken in a single experiment is
where
is the model and
is the vector of the measured data. It is assumed that all sensors have the same Gaussian noise level
. In practice, the log-likelihood function is used for the sake of computational ease.
Basically, there are two concepts to optimize the sensor positions. The first one is to predefine a number of sensors and change their continuous position. Due to the fact that the sensors are considered as volumes in the FE model, a position change requires remeshing and the computation of the FEM solution. Instead, a 2D sensor array can be defined in advance, where the values of all sensors are evaluated with only one FEM computation, and the optimization procedure takes the active or inactive status of each sensor as a parameter. Thus, we introduce binary weights
such that
if and only if sensor
k is used. As described in
Section 2, the sensor–actuator system is positioned at different locations along the
x direction, which means that the cut edge is shifted relative to the sensors. For all measurement positions, the same sensor configuration, i.e., the same set of weights
, is used. Thus, with
being the number of measurement positions, the log-likelihood function is written as
with
.
The maximizer of the log-likelihood function is the estimated parameter vector
, fitting the model to the observed noisy data:
The maximum likelihood estimate can be found by applying a suitable optimization method. However, the optimization of the problem formulated in (
7) leads to different estimated parameters for different independent measurements due to the data noise. Thus, the data noise leads to uncertainties in the parameter space. These uncertainties can be evaluated by taking a significant amount of noisy data sets and calculating the covariance matrix of the estimated parameters. However, this process is computationally very expensive since the inverse problem must be solved for each set. Therefore, another method is used, which estimates the covariance matrix by evaluating the Hessian of the log-likelihood function.
3.1. Fisher Information Matrix
The Fisher information matrix, denoted as
, is a mathematical quantity commonly used in maximum likelihood estimation (MLE). In the context of MLE, it represents the amount of information that the observed data contain about the parameter vector
. It is defined as the negative expectation of the second derivative of the log-likelihood function with respect to
[
12],
and quantifies the curvature or shape of the log-likelihood function near the true value of the parameter vector.
The FIM for two parameters
a and
b and the residuals
can be written as
At the best-fit
, the residuals are very small, and therefore, the second term of (
9) can be neglected. Thus, the approximated observed FIM is calculated by
using the Jacobian
. The inverse of the Fisher information matrix is an estimator of the asymptotic covariance matrix,
and the parameter variances are then the diagonal elements of
; thus,
3.2. Cramér–Rao Bound and Target Variance of the MLE
The Cramér–Rao Bound (CRB) is a fundamental concept in statistical estimation theory [
19]. It provides a lower bound for the variance of an estimator for a parameter in a statistical model and thus the best possible accuracy that can be achieved with the present model and the available measurements. The CRB is given by the inverse of the Fisher information matrix,
with
being an estimate of the
i-th parameter of the set
. Therefore, the following condition must hold for a target variance
:
For a confidence level
, with
being the significance level; the confidence interval can be written as
where the
z-score is
for a confidence level of
. Thus, the target variance for a maximum deviation
, which is defined by the designer, can be calculated by
meaning that
must be fulfilled.
6. Conclusions
In this paper, an approach for optimizing the sensor configuration of an electromagnetic measurement system for the determination of magnetic properties of cut steel sheets is presented. The aim is to minimize the uncertainty of the magnetic material parameters to be identified based on the measured flux density in the vicinity of the cut edge. The Fisher information matrix is used to approximate the covariance matrix, which contains the parameter uncertainties to be optimized. The objective function is formulated by using the E-criterion and considering different material parameter configurations for a robust optimal design. To solve the optimization problem, a binary version of the Genetic Algorithm is used since the optimization parameters are binary weights that define whether the value of the sensor in a predefined array is considered. The results of two different aspects of the realization of the measuring system are presented. In the first case, the extent to which the parameter uncertainty can be reduced by using a maximum number of sensors and optimizing their placement is investigated. In the second case, a maximum permitted parameter uncertainty is specified and the necessary number of sensors and their optimal placement is determined.
In future work, nonlinear material properties will be taken into account, and the geometry of the sensor–actuator system will also be included in the optimization. As for the method to improve the identifiability of the material parameters, only the accuracy is currently addressed. However, there is still a risk that the solution to the inverse problem is not unique, i.e., different parameters lead to the same observation. Investigations in this respect still need to be carried out.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}