
LSTM-Based Stacked Autoencoders for Early Anomaly Detection in Induction Heating Systems


Abstract
1. Introduction
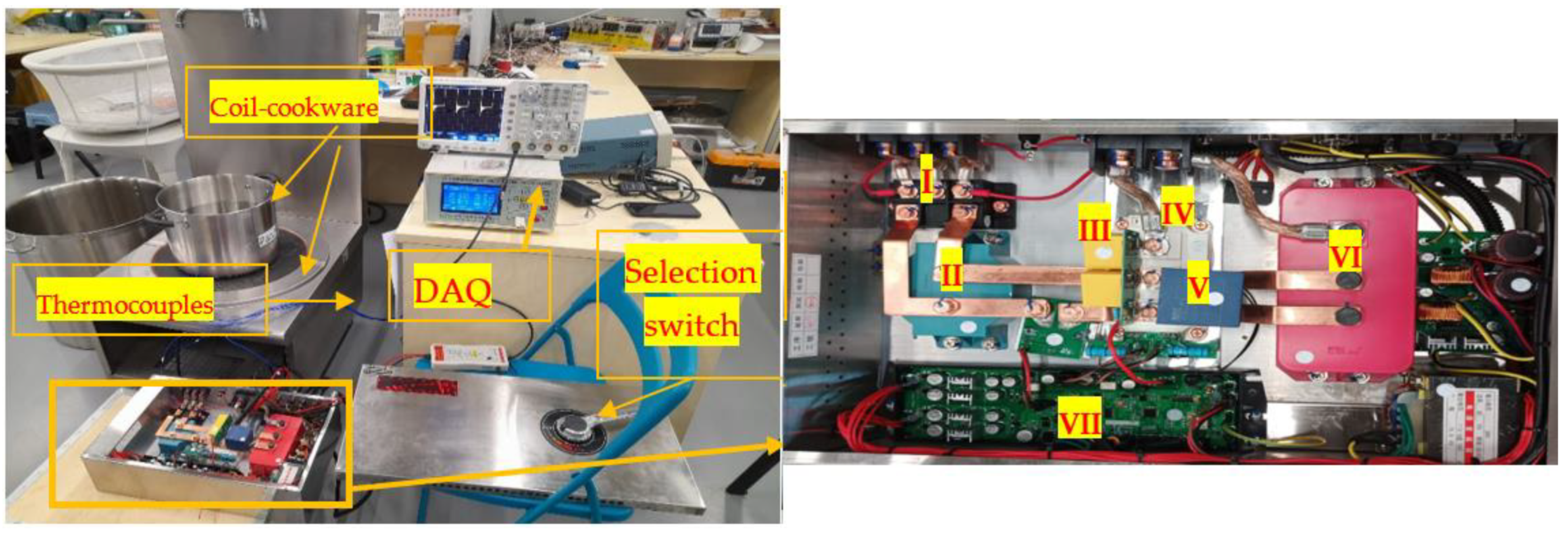
2. Three-Phase Induction Heating System
2.1. Cookware Temperature
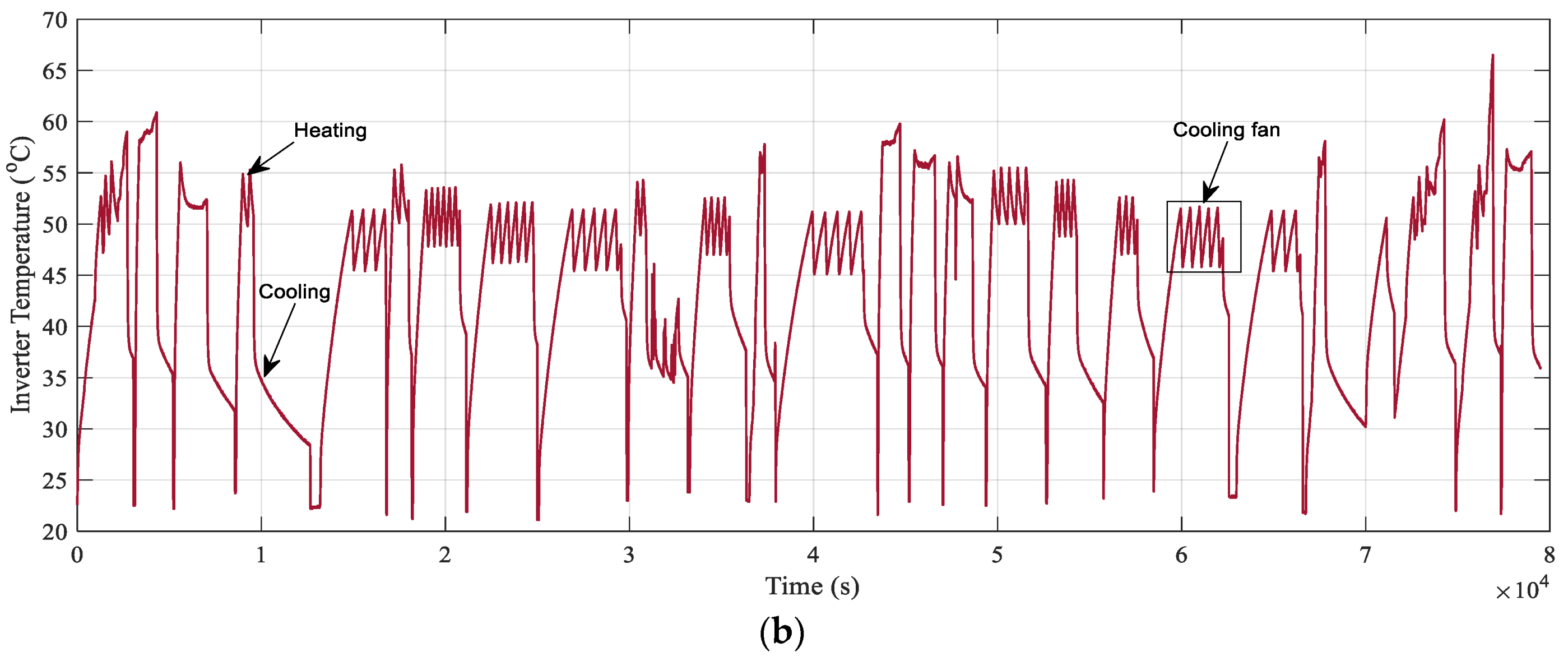
2.2. Inverter Module Temperature
3. LSTM-AE Model
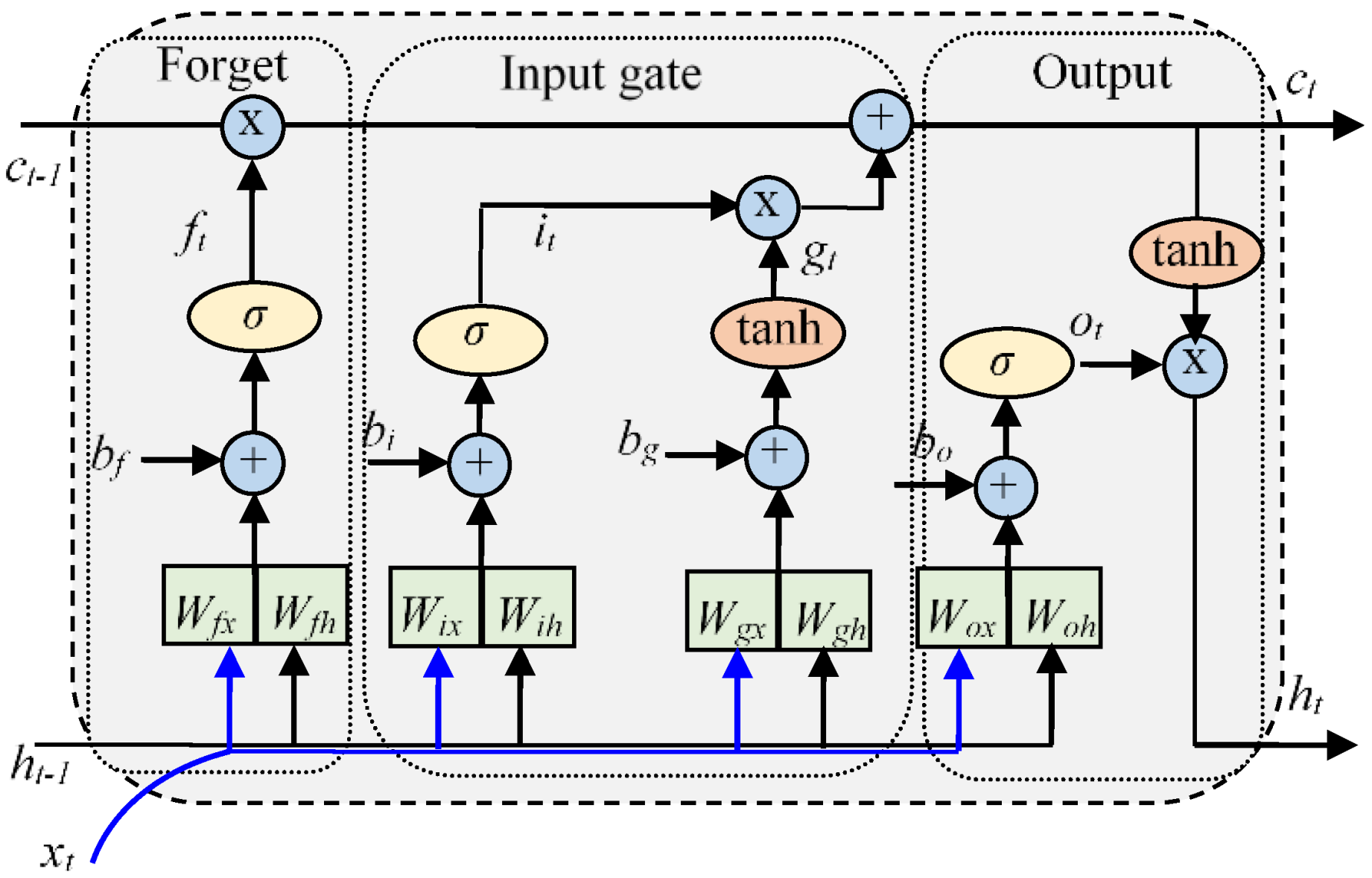
3.1. LSTM Cell Structure
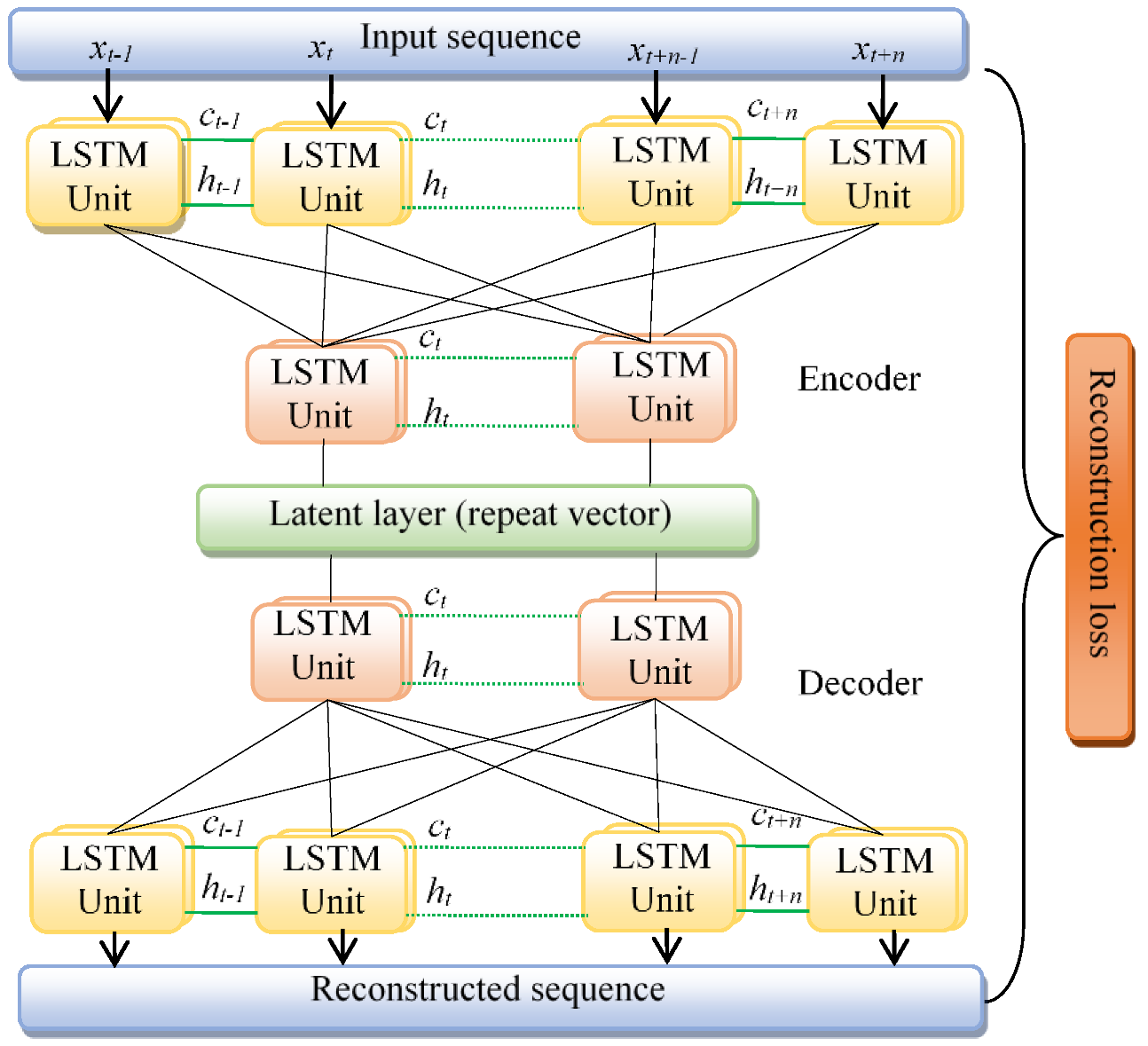
3.2. Autoencoder Structure
4. Early Anomaly Detection Methodology
4.1. Training Methodology
4.2. Deployment Methodology
5. Experimental Results and Discussions
5.1. Data Collection
5.1.1. Training Data Collection
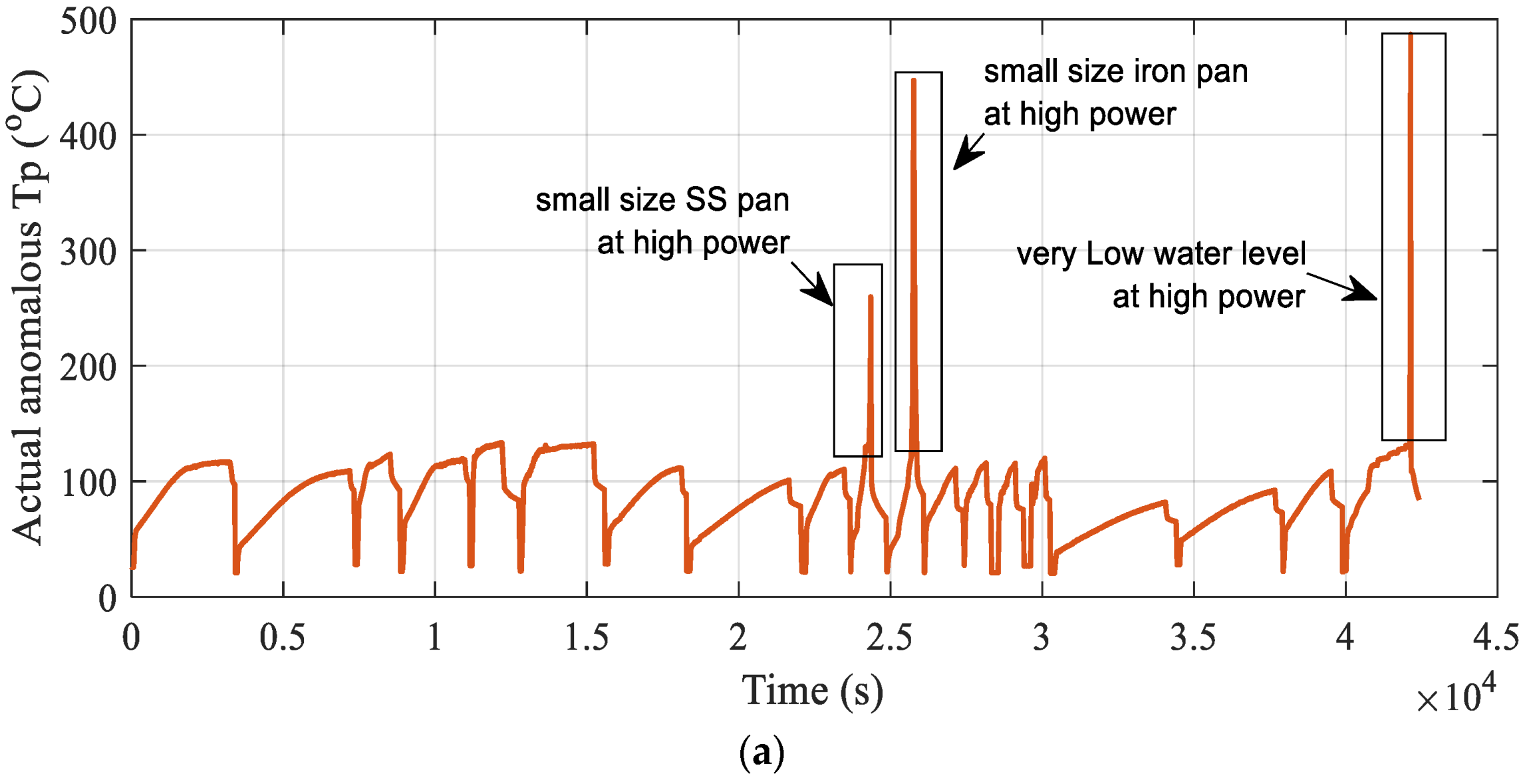
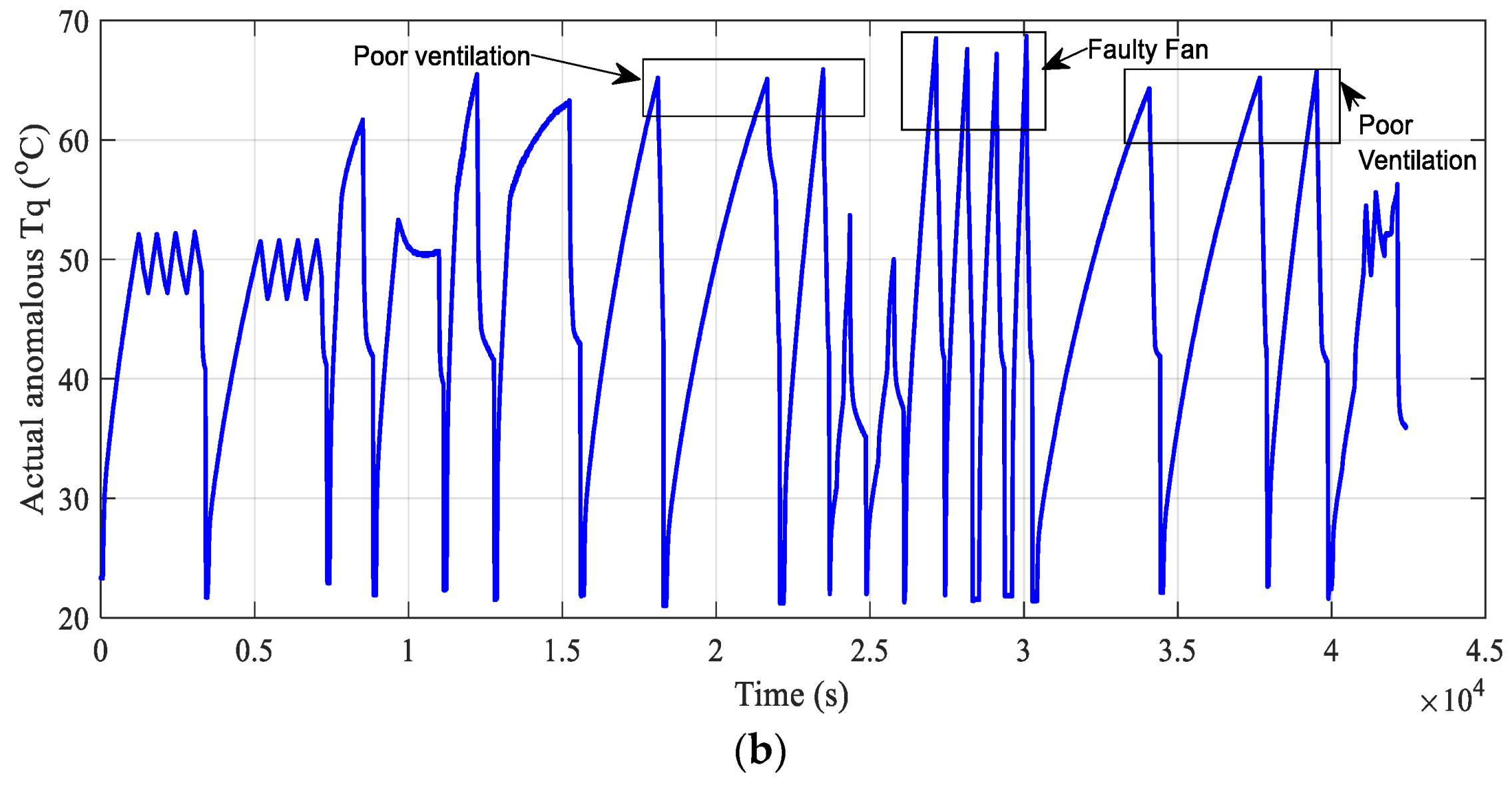
5.1.2. Testing Data Collection
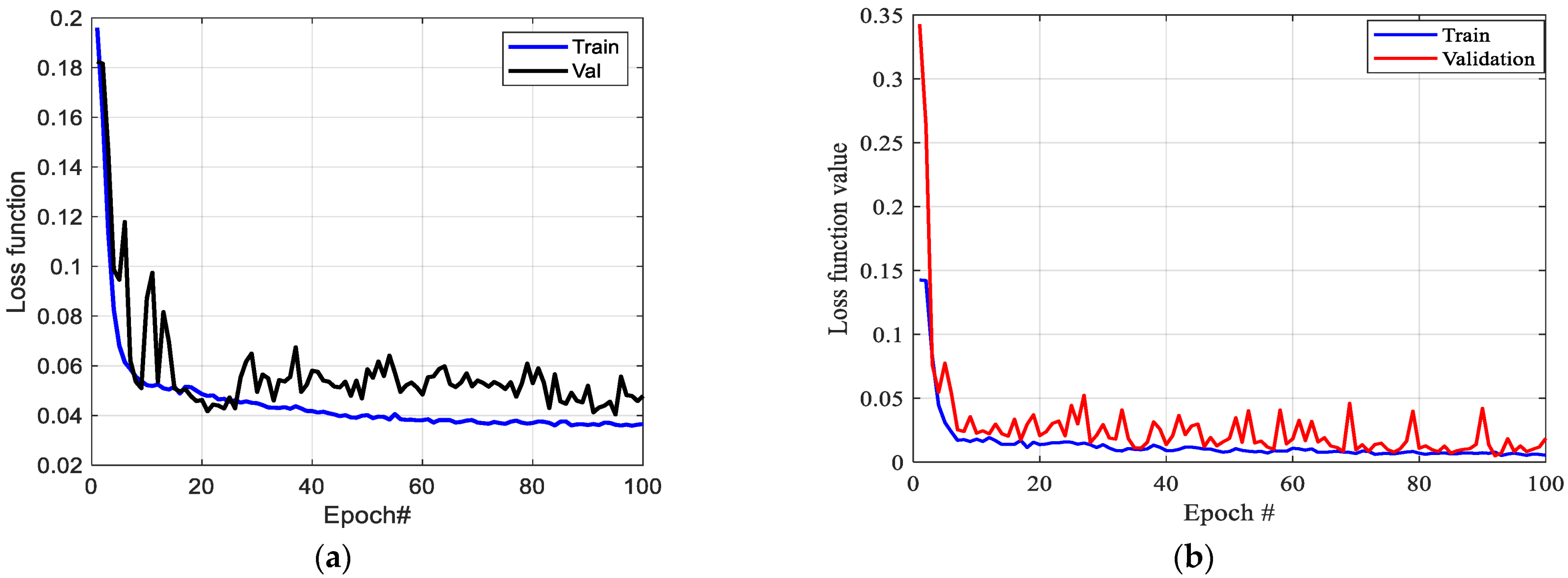
5.2. Training Results
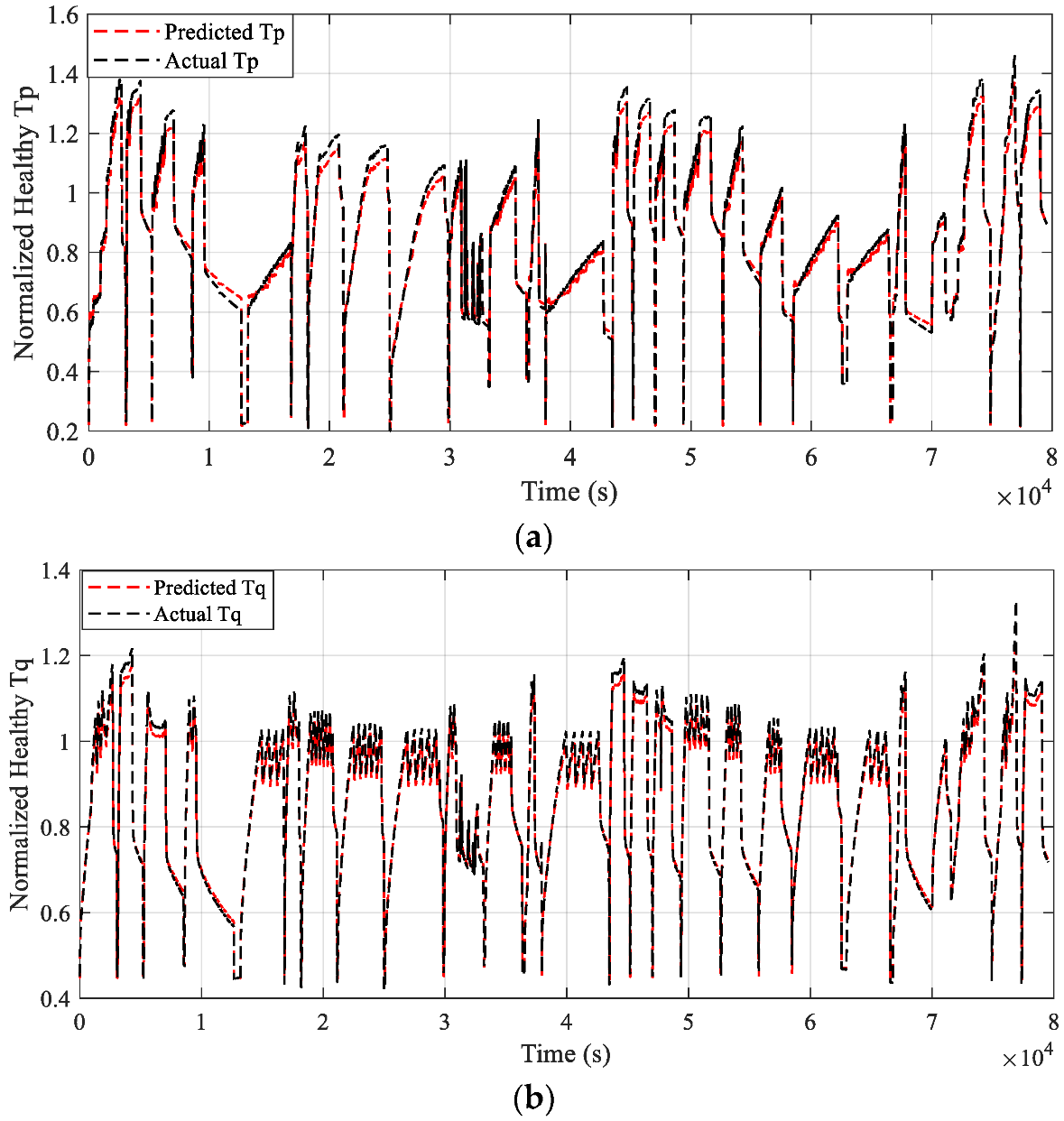
5.3. Predicting Training Data
5.4. Threshold Selection
5.5. Testing The Learned LSTM-AE Model
5.6. Comparison with Other Models
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Mai, T.; Steinberg, D.; Logan, J.; Bielen, D.; Eurek, K.; McMillan, C. An Electrified Future: Initial Scenarios and Future Research for U.S. Energy and Electricity Systems. IEEE Power Energy Mag. 2018, 16, 34–47. [Google Scholar] [CrossRef]
- Zhou, M.; Liu, H.; Peng, L.; Qin, Y.; Chen, D.; Zhang, L.; Mauzerall, D.L. Environmental benefits and household costs of clean heating options in northern China. Nat. Sustain. 2022, 5, 329–338. [Google Scholar] [CrossRef]
- Lucia, O.; Acero, J.; Carretero, C.; Burdio, J.M. Induction Heating Appliances: Toward More Flexible Cooking Surfaces. IEEE Ind. Electron. Mag. 2013, 7, 35–47. [Google Scholar] [CrossRef]
- Cabeza-Gil, I.; Calvo, B.; Grasa, J.; Franco, C.; Llorente, S.; Martínez, M.A. Thermal analysis of a cooking pan with a power control induction system. Appl. Therm. Eng. 2020, 180, 115789. [Google Scholar] [CrossRef]
- Díaz Moreno, J.M.; García Vázquez, C.; González Montesinos, M.T.; Ortegón Gallego, F.; Viglialoro, G. Industrial Steel Heat Treating: Numerical Simulation of Induction Heating and Aquaquenching Cooling with Mechanical Effects. Mathematics 2021, 9, 1203. [Google Scholar] [CrossRef]
- Elsaady, W.; Moughton, C.; Nasser, A.; Lacovides, H. Coupled numerical modelling and experimental analysis of domestic induction heating systems. Appl. Therm. Eng. 2023, 227, 120170. [Google Scholar] [CrossRef]
- Goman, V.; Prakht, V.; Dmitrievskii, V.; Sarapulov, F. Analysis of Coupled Thermal and Electromagnetic Processes in Linear Induction Motors Based on a Three-Dimensional Thermal Model. Mathematics 2022, 10, 114. [Google Scholar] [CrossRef]
- Jang, E.; Kwon, M.J.; Park, S.M.; Ahn, H.M.; Lee, B.K. Analysis and Design of Flexible-Surface Induction-Heating Cooktop with GaN-HEMT-Based Multiple Inverter System. IEEE Trans. Power Electron. 2022, 37, 12865–12876. [Google Scholar] [CrossRef]
- Patidar, B.; Hussain, M.M.; Jha, S.K.; Dikshit, B.; Sharma, A. Modelling and experimental demonstration of a litz coil-based high-temperature induction heating system for melting application. IET Electr. Power Appl. 2018, 12, 161–168. [Google Scholar] [CrossRef]
- Cao, L.-X.; Yin, T.; Jin, M.-X.; He, Z.-Z. Flexible circulated-cooling liquid metal coil for induction heating. Appl. Therm. Eng. 2019, 162, 114260. [Google Scholar] [CrossRef]
- Vishnuram, P.; Ramachandiran, G.; Ramasamy, S.; Dayalan, S. A comprehensive overview of power converter topologies for induction heating applications. Int. Trans. Electr. Energy Syst. 2020, 30, e12554. [Google Scholar] [CrossRef]
- Villa, J.; Barragán, L.A.; Artigas, J.I.; Navarro, D.; Domínguez, A.; Cabeza, T. SoC-Based In-Cycle Load Identification of Induction Heating Appliances. IEEE Trans. Ind. Electron. 2021, 68, 6762–6772. [Google Scholar] [CrossRef]
- Sarnago, H.; Burdio, J.M.; Lucia, O. Dual-Output Extended-Power-Range Quasi-Resonant Inverter for Induction Heating Appliances. IEEE Trans. Power Electron. 2023, 38, 3385–3397. [Google Scholar] [CrossRef]
- Sarnago, H.; Burdío, J.M.; Lucía, Ó. High-Performance and Cost-Effective ZCS Matrix Resonant Inverter for Total Active Surface Induction Heating Appliances. IEEE Trans. Power Electron. 2019, 34, 117–125. [Google Scholar] [CrossRef]
- Lucia, S.; Navarro, D.; Karg, B.; Sarnago, H.; Lucía, Ó. Deep Learning-Based Model Predictive Control for Resonant Power Converters. IEEE Trans. Ind. Inform. 2021, 17, 409–420. [Google Scholar] [CrossRef]
- Qais, M.H.; Loo, K.H.; Liu, J.; Lai, C.-M. Least Mean Square-Based Fuzzy c-Means Clustering for Load Recognition of Induction Heating. IEEE Trans. Instrum. Meas. 2022, 71, 3196702. [Google Scholar] [CrossRef]
- Pérez-Tarragona, M.; Sarnago, H.; Lucía, Ó.; Burdío, J.M. Power factor correction stage and matrix zero voltage switching resonant inverter for domestic induction heating appliances. IET Power Electron. 2022, 15, 1134–1143. [Google Scholar] [CrossRef]
- Sun, R.; Shi, Y.; Bing, Z.; Li, Q.; Wang, R. Metal transfer and thermal characteristics in drop-on-demand deposition using ultra-high frequency induction heating technology. Appl. Therm. Eng. 2019, 149, 731–744. [Google Scholar] [CrossRef]
- Sanz, F.; Sagues, C.; Llorente, S. Induction Heating Appliance with a Mobile Double-Coil Inductor. IEEE Trans. Ind. Appl. 2015, 51, 1945–1952. [Google Scholar] [CrossRef]
- Lucía, Ó.; Sarnago, H.; Burdío, J.M. Soft-Stop Optimal Trajectory Control for Improved Performance of the Series-Resonant Multiinverter for Domestic Induction Heating Applications. IEEE Trans. Ind. Electron. 2015, 62, 6251–6259. [Google Scholar] [CrossRef]
- Zhou, Z.-G.; Tang, P. Improving time series anomaly detection based on exponentially weighted moving average (EWMA) of season-trend model residuals. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 3414–3417. [Google Scholar]
- Mi, J.; Hou, Y.; He, W.; He, C.; Zhao, H.; Huang, W. A nonparametric cumulative sum-based fault detection method for rolling bearings using high-level extended isolated forest. IEEE Sens. J. 2022, 23, 2443–2455. [Google Scholar] [CrossRef]
- Zhang, J.; Paschalidis, I.C. Statistical Anomaly Detection via Composite Hypothesis Testing for Markov Models. IEEE Trans. Signal Process. 2018, 66, 589–602. [Google Scholar] [CrossRef]
- Haider, S.N.; Zhao, Q.; Li, X. Data driven battery anomaly detection based on shape based clustering for the data centers class. J. Energy Storage 2020, 29, 101479. [Google Scholar] [CrossRef]
- Liu, H.; Xu, X.; Li, E.; Zhang, S.; Li, X. Anomaly Detection with Representative Neighbors. IEEE Trans. Neural Netw. Learn. Syst. 2021, 34, 2831–2841. [Google Scholar] [CrossRef] [PubMed]
- Akpinar, M.; Adak, M.F.; Guvenc, G. SVM-based anomaly detection in remote working: Intelligent software SmartRadar. Appl. Soft Comput. 2021, 109, 107457. [Google Scholar] [CrossRef]
- Tsukada, M.; Kondo, M.; Matsutani, H. A Neural Network-Based On-Device Learning Anomaly Detector for Edge Devices. IEEE Trans. Comput. 2020, 69, 1027–1044. [Google Scholar] [CrossRef]
- Li, Z.; Sun, Y.; Yang, L.; Zhao, Z.; Chen, X. Unsupervised Machine Anomaly Detection Using Autoencoder and Temporal Convolutional Network. IEEE Trans. Instrum. Meas. 2022, 71, 3212547. [Google Scholar] [CrossRef]
- Cui, M.; Wang, J.; Yue, M. Machine Learning-Based Anomaly Detection for Load Forecasting Under Cyberattacks. IEEE Trans. Smart Grid 2019, 10, 5724–5734. [Google Scholar] [CrossRef]
- Castellani, A.; Schmitt, S.; Squartini, S. Real-World Anomaly Detection by Using Digital Twin Systems and Weakly Supervised Learning. IEEE Trans. Ind. Inform. 2021, 17, 4733–4742. [Google Scholar] [CrossRef]
- Wu, D.; Jiang, Z.; Xie, X.; Wei, X.; Yu, W.; Li, R. LSTM Learning with Bayesian and Gaussian Processing for Anomaly Detection in Industrial IoT. IEEE Trans. Ind. Inform. 2020, 16, 5244–5253. [Google Scholar] [CrossRef]
- Musleh, A.S.; Chen, G.; Dong, Z.Y.; Wang, C.; Chen, S. Attack Detection in Automatic Generation Control Systems using LSTM-Based Stacked Autoencoders. IEEE Trans. Ind. Inform. 2023, 19, 153–165. [Google Scholar] [CrossRef]
- Kumar, P.; Kumar, P.; Hati, A.S.; Kim, H.S. Deep Transfer Learning Framework for Bearing Fault Detection in Motors. Mathematics 2022, 10, 4683. [Google Scholar] [CrossRef]
- Li, W.; Shang, Z.; Zhang, J.; Gao, M.; Qian, S. A novel unsupervised anomaly detection method for rotating machinery based on memory augmented temporal convolutional autoencoder. Eng. Appl. Artif. Intell. 2023, 123, 106312. [Google Scholar] [CrossRef]
- Shanmuganathan, V.; Suresh, A. LSTM-Markov based efficient anomaly detection algorithm for IoT environment. Appl. Soft Comput. 2023, 136, 110054. [Google Scholar] [CrossRef]
- Raza, A.; Tran, K.P.; Koehl, L.; Li, S. AnoFed: Adaptive anomaly detection for digital health using transformer-based federated learning and support vector data description. Eng. Appl. Artif. Intell. 2023, 121, 106051. [Google Scholar] [CrossRef]
- Sun, C.; He, Z.; Lin, H.; Cai, L.; Cai, H.; Gao, M. Anomaly detection of power battery pack using gated recurrent units based variational autoencoder. Appl. Soft Comput. 2023, 132, 109903. [Google Scholar] [CrossRef]
- Copiaco, A.; Himeur, Y.; Amira, A.; Mansoor, W.; Fadli, F.; Atalla, S.; Sohail, S.S. An innovative deep anomaly detection of building energy consumption using energy time-series images. Eng. Appl. Artif. Intell. 2023, 119, 105775. [Google Scholar] [CrossRef]
- Fu, S.; Zhong, S.; Lin, L.; Zhao, M. A re-optimized deep auto-encoder for gas turbine unsupervised anomaly detection. Eng. Appl. Artif. Intell. 2021, 101, 104199. [Google Scholar] [CrossRef]
- El Sayed, M.S.; Le-Khac, N.-A.; Azer, M.A.; Jurcut, A.D. A Flow-Based Anomaly Detection Approach with Feature Selection Method Against DDoS Attacks in SDNs. IEEE Trans. Cogn. Commun. Netw. 2022, 8, 1862–1880. [Google Scholar] [CrossRef]
- Jin, Y.; Yang, N.; Xu, X. Innovative induction heating technology based on transformer theory: Inner heating of electrolyte solution via alternating magnetic field. Appl. Therm. Eng. 2020, 179, 115732. [Google Scholar] [CrossRef]
- Plumed, E.; Lope, I.; Acero, J. Induction Heating Adaptation of a Different-Sized Load With Matching Secondary Inductor to Achieve Uniform Heating and Enhance Vertical Displacement. IEEE Trans. Power Electron. 2021, 36, 6929–6942. [Google Scholar] [CrossRef]
- Liu, H.-C.; Chang, Y.-L.; Lin, C.-W.; Chen, Y.-Y.; Lin, C.-W.; Lin, Y.-C.; Huang, M.-S.; Hsu, H.-Y. Experimental and numerical multidisciplinary methodology to investigate the thermal efficiency of boiling pot on induction system. Case Stud. Therm. Eng. 2022, 36, 102199. [Google Scholar] [CrossRef]
- Li, W.; Li, G.; Sun, Z.; Wang, Q. Real-time estimation of junction temperature in IGBT inverter with a simple parameterized power loss model. Microelectron. Reliab. 2021, 127, 114409. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | AD Application | AD Approach | Merits | Limitation |
|---|---|---|---|---|
| [34] | Rotating machines | convolutional AE | reduced overlapping area and noise robustness | time costly |
| [35] | AD in the IoT environment | LSTM-Markov | high accuracy compared with the KNN | time-critical sensor events need to be explored |
| [36] | ECG anomaly detection | Transformer-based AE | lightweight in terms of the number of parameters and computation | vulnerable to several attacks |
| [37] | AD in electric vehicles | gated recurrent unit-based AE | locate the specific time of anomalies. | small amount of training data is used |
| [38] | AD in building energy consumption | CNN | No overfitting, reduction of false positive alarms, and better interpretation | Using edge devices to preserve privacy and improve security |
| [39] | AD in gas turbine | Optimized deep AE | reconstruction errors of normal samples are very small | using only two cluster centers in the sample selection mechanism. |
| [40] | AD in a software-defined network | LSTM-AE | high detection rate and accurate classification | overfitting and proper feature selection |
| Parameters | Value | Description |
|---|---|---|
| Layers | 4 | No. of all LSTM layers |
| Units | [64, 64, 128, 128] | No. of LSTM units in the layers |
| Activation | [tanh, tanh, tanh, sigmoid] | the activation functions in each layer |
| Latent layer | repeat vector | to prepare the input for the decoder |
| Dropout | False | to avoid missing data |
| Optimizer | Adam | gradient descent method |
| Loss function | MAE | mean absolute error |
| Learning rate | 0.0095 | the rate between [0, 0.1] |
| Batch size | 64 | No. of samples to work on |
| Epochs No. | 100 | No. of iterations. |
| Validation split | 0.2 | Validation data split from training data |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qais, M.H.; Kewat, S.; Loo, K.H.; Lai, C.-M.; Leung, A. LSTM-Based Stacked Autoencoders for Early Anomaly Detection in Induction Heating Systems. Mathematics 2023, 11, 3319. https://doi.org/10.3390/math11153319
Qais MH, Kewat S, Loo KH, Lai C-M, Leung A. LSTM-Based Stacked Autoencoders for Early Anomaly Detection in Induction Heating Systems. Mathematics. 2023; 11(15):3319. https://doi.org/10.3390/math11153319
Chicago/Turabian StyleQais, Mohammed H., Seema Kewat, Ka Hong Loo, Cheung-Ming Lai, and Aldous Leung. 2023. "LSTM-Based Stacked Autoencoders for Early Anomaly Detection in Induction Heating Systems" Mathematics 11, no. 15: 3319. https://doi.org/10.3390/math11153319
APA StyleQais, M. H., Kewat, S., Loo, K. H., Lai, C.-M., & Leung, A. (2023). LSTM-Based Stacked Autoencoders for Early Anomaly Detection in Induction Heating Systems. Mathematics, 11(15), 3319. https://doi.org/10.3390/math11153319