
Several Control Problems of a Class of Complex Nonlinear Systems Based on UDE

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (a)
- A method of transforming the hyper-chaotic model with cubic nonlinearity and complex variables into an equivalent real chaotic system is proposed.
- (b)
- A previously known dynamic gain feedback controller is used to realize the stabilization control, synchronization control, and anti-synchronization control of the nominal system.
- (c)
- Combining the dynamic gain feedback control method and the uncertainty and disturbance estimation control method, a combined controller is proposed to solve the stabilization, complete synchronization, and anti-synchronization problems of a class of complex variable chaotic systems with model uncertainty and external disturbances. Finally, a simulation example is given to verify the feasibility and effectiveness of the designed controller.
2. Preliminary
- first-order low-pass filter:
- secondary filter:where.
3. Problem Formulation
4. Main Result
4.1. Stabilization of Systems
4.2. Complete Synchronization
- step one:
- step two:
4.3. Existence of Anti-Synchronization
- step one:
- step two:
5. Illustrative Examples with Numerical Simulations
5.1. Stabilization of Systems
5.2. Complete Synchronizations
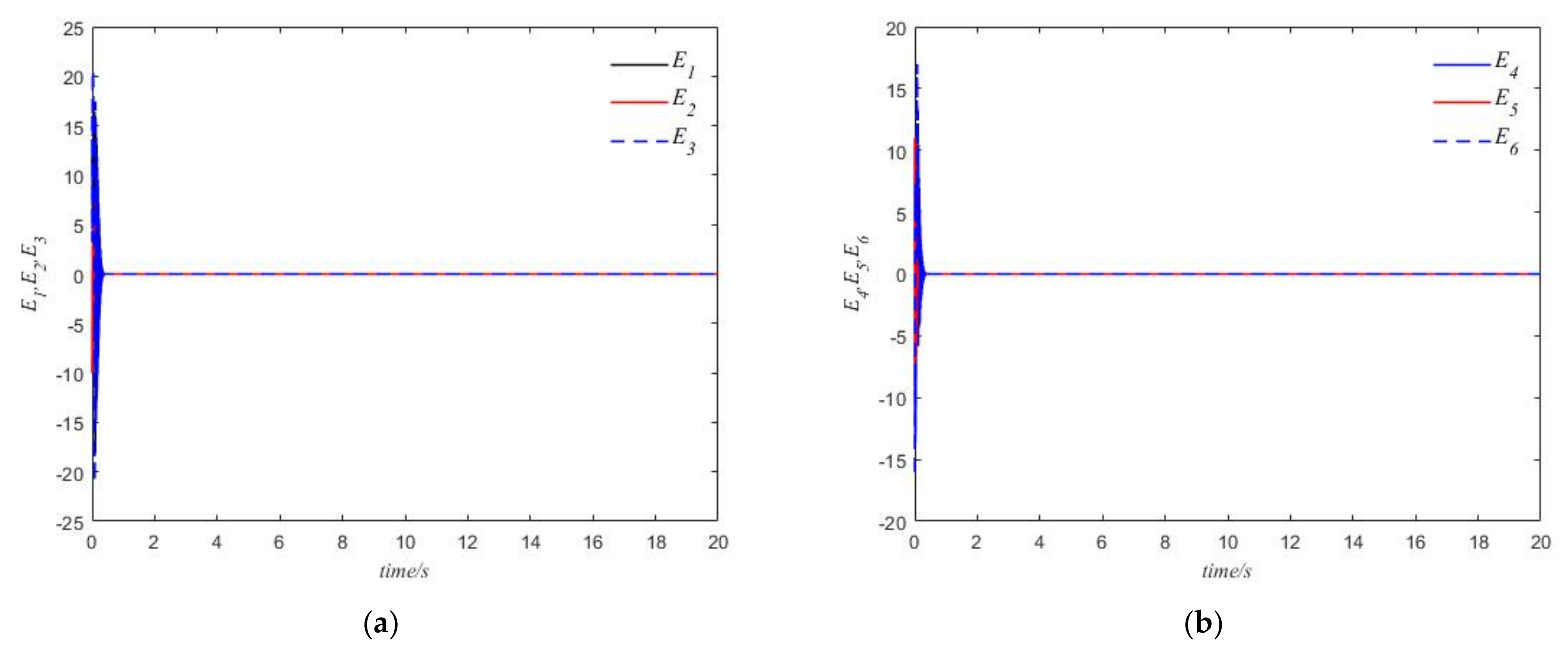
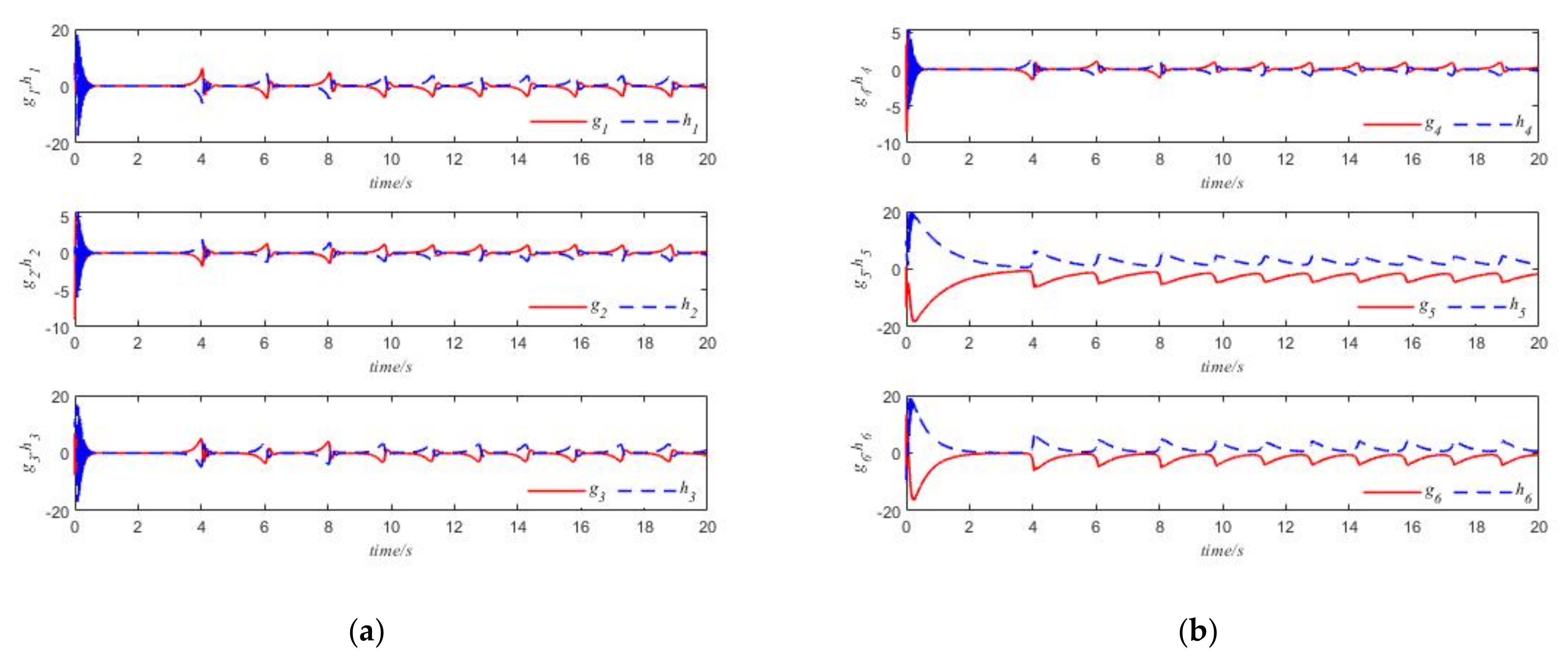
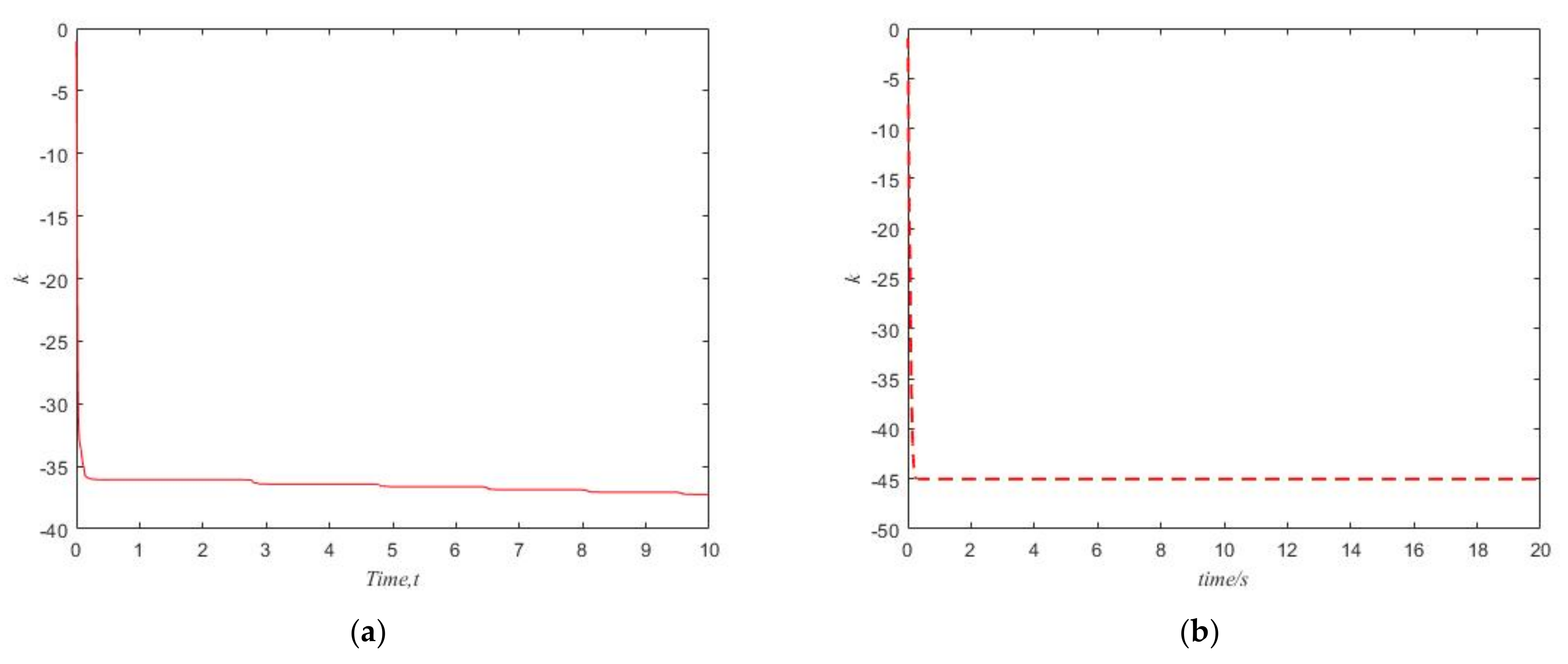
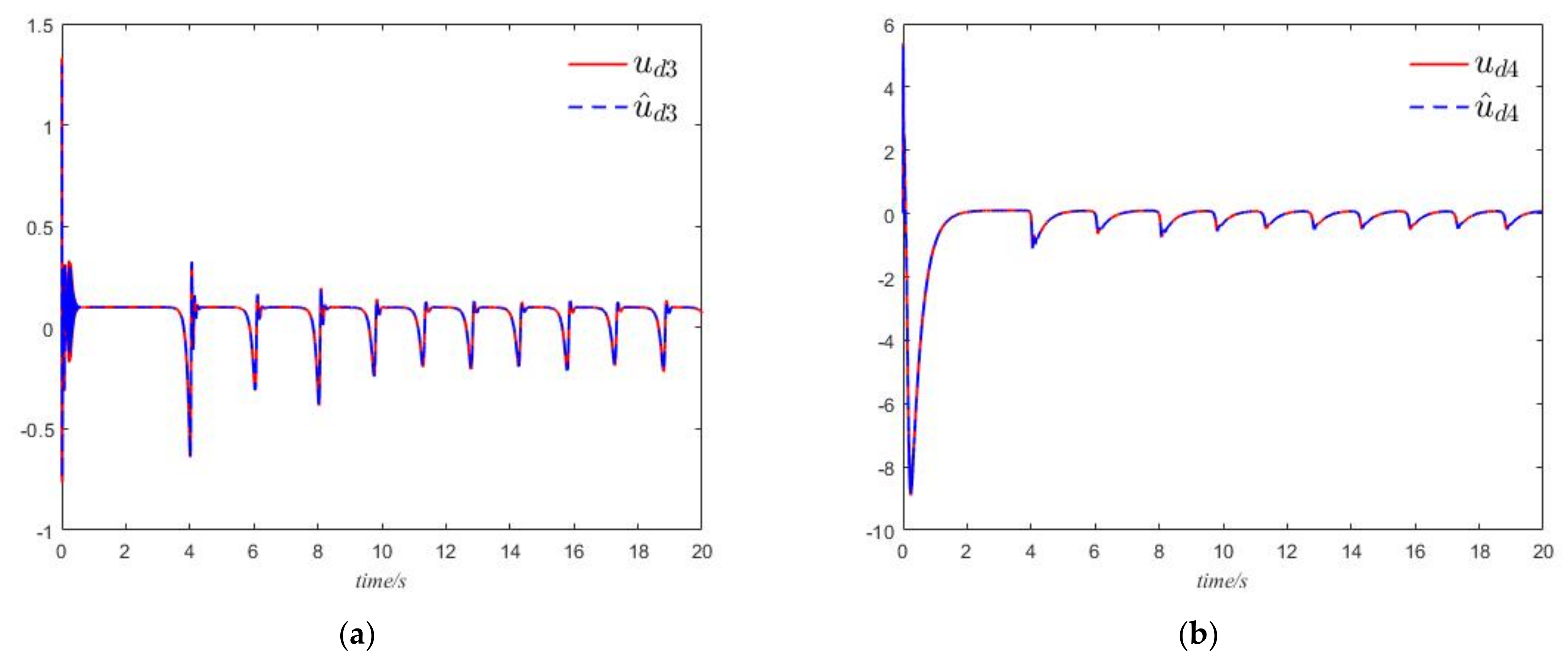
5.3. Anti-Synchronization
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Pecora, L.; Carroll, T. Synchronization in Chaotic Systems. Phys. Rev. Lett. 1990, 64, 821–824. [Google Scholar] [CrossRef] [PubMed]
- Jalal, A.A.; Amen, A.I. Darboux integrability of the simple chaotic flow with a line equilibria differential system. Chaos Solitons Fractals 2020, 135, 109712. [Google Scholar] [CrossRef]
- Osses, G.; Castillo, E. Numerical modeling of laminar and chaotic natural convection flows using a non-residual dynamic VMS formulation. Comput. Methods Appl. Mech. Eng. 2021, 386, 114099. [Google Scholar] [CrossRef]
- Aidaoui, L.; Lasbet, Y. Improvement of transfer phenomena rates in open chaotic flow of nanofluid under the effect of magnetic field: Application of a combined method. Int. J. Mech. Sci. 2020, 179, 105649. [Google Scholar] [CrossRef]
- Giona, M.; Adrover, A.; Cerbelli, S. On the use of the pulsed-convection approach for modelling advection-diffusion in chaotic flows—A prototypical example and direct numerical simulations. Physica A 2005, 348, 37–73. [Google Scholar] [CrossRef]
- Guo, R. A simple adaptive controller for chaos and hyper-chaos synchronization. Phys. Lett. A 2008, 372, 5593–5597. [Google Scholar] [CrossRef]
- Mahmoud, G.M.; Ahmed, M.E.; Mahmoud, E.E. Analysis of hyperchaotic complex Lorenz systems. Int. J. Mod. Phys. C 2008, 19, 1477–1494. [Google Scholar] [CrossRef]
- Hammami, S.; Benrejeba, M.; Fekib, M.; Borne, P. Feedback control design for Rossler and Chen chaotic systems anti-synchronization. Nonlinear Dyn. 2010, 374, 2835–2840. [Google Scholar] [CrossRef]
- Guo, R. Projective synchronization of a class of chaotic systems by dynamic feedback control method. Nonlinear Dyn. 2017, 90, 53–64. [Google Scholar] [CrossRef]
- Jiang, W.H.; Niu, B. On the coexistence of periodic or quasi-periodic oscillations near a Hopf-pitchfork bifurcation in NFDE. Commun. Nonlinear Sci. Numer. Simul. 2013, 18, 464–477. [Google Scholar] [CrossRef]
- Guo, R.W. Simultaneous synchrnizaiton and anti-synchronzation of two identical new 4D chaotic systems. Chin. Phys. Lett. 2011, 28, 040205. [Google Scholar] [CrossRef]
- Dai, J.G.; Ren, B.B. UDE-based robust boundary control for an unstable parabolic PDE with unknown input disturbance. Automatica 2018, 93, 363–368. [Google Scholar] [CrossRef]
- Ren, B.; Zhong, Q.C. Asymptotic reference tracking and disturbance rejection of UDE-based robust control. IEEE Trans. Ind. Electron. 2017, 64, 3166–3176. [Google Scholar] [CrossRef]
- Aviram, I.; Rabinovitch, A. Bifurcation analysis of bacteria and bacteriophage coexistence in the presence of bacterial debris. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 242–254. [Google Scholar] [CrossRef]
- Huang, C.; Cao, J. Active control strategy for synchronization and anti-synchronization of a fractional chaotic financial system. Physica A 2017, 4731, 262–275. [Google Scholar] [CrossRef]
- Liu, D.; Zhu, S.; Sun, K. Anti-synchronization of complex-valued memristor-based delayed neural networks. Neural Netw. 2018, 105, 1–13. [Google Scholar] [CrossRef]
- Jia, B.; Wu, Y.; He, D.; Guo, B.; Xue, L. Dynamics of transitions from anti-phase to multiple in-phase synchronizations in inhibitory coupled bursting neurons. Nonlinear Dyn. 2018, 93, 1599–1618. [Google Scholar] [CrossRef]
- Mahmoud, E.E.; Abo-Dahab, S.M. Dynamical properties and complex anti-synchronization with applications to secure communications for a novel chaotic complex nonlinear model. Chaos Solitons Fractals 2018, 106, 273–284. [Google Scholar] [CrossRef]
- Mahmoud, E.E. Dynamical behaviors, Control and synchronization of a new chaotic model with complex variables and cubic nonlinear terms. Results Phys. 2017, 10, 1346–1356. [Google Scholar] [CrossRef]
- Yang, D.X.; Zhou, J.L. Connections among several chaos feedback control approaches and chaotic vibration control of mechanical systems. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 3954–3968. [Google Scholar] [CrossRef]
- Huang, Y.; Hou, J.; Yang, E. General decay lag anti-synchronization of multi-weighted delayed coupled neural networks with reaction-diffusion terms. Inf. Sci. 2020, 511, 36–57. [Google Scholar] [CrossRef]
- Pecora, L.M.; Carroll, T.L. Synchronization of chaotic systems. Chaos 2015, 25, 597–611. [Google Scholar] [CrossRef] [PubMed]
- Ren, L.; Guo, R.W. A necessary and sufficient condition of anti-synchronization for chaotic systems and its applications. Math. Probl. Eng. 2015, 2015, 1–7. [Google Scholar]
- Jiang, H.B.; Liu, Y.; Zhang, L.P.; Yu, J.J. Anti-phase synchronization and symmetry-breaking bifurcation of impulsively coupled oscillators. Commun. Nonlinear Sci. Numer. Simul. 2016, 39, 199–208. [Google Scholar] [CrossRef] [Green Version]
- Mobayen, S. Chaos synchronization of uncertain chaotic systems using composite nonlinear feedback based integral sliding mode control. ISA Trans. 2018, 77, 100–111. [Google Scholar] [CrossRef] [PubMed]
- Mobayen, S. A novel global sliding mode control based on exponential reaching law for a class of underactuated systems with external disturbances. J. Comput. Nonlinear Dyn. 2015, 11, 021011. [Google Scholar] [CrossRef]
- Yi, X.; Guo, R.; Qi, Y. Stabilization of Chaotic Systems with Both Uncertainty and Disturbance by the UDE-Based Control Method. IEEE Access 2020, 8, 62471–62477. [Google Scholar] [CrossRef]
- Li, L.; Li, B.; Guo, R. Consensus Control for Networked Manipulators with Switched Parameters and Topologies. IEEE Access 2021, 9, 9209–9217. [Google Scholar] [CrossRef]
- Peng, R.; Jiang, C.; Guo, R. Stabilization of a class of fractional order systems with both uncertainty and disturbance. IEEE Access 2021, 9, 42697–42706. [Google Scholar] [CrossRef]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Zhang, W.; Ma, L.; Wang, G. Several Control Problems of a Class of Complex Nonlinear Systems Based on UDE. Mathematics 2022, 10, 1313. https://doi.org/10.3390/math10081313
Wang Z, Zhang W, Ma L, Wang G. Several Control Problems of a Class of Complex Nonlinear Systems Based on UDE. Mathematics. 2022; 10(8):1313. https://doi.org/10.3390/math10081313
Chicago/Turabian StyleWang, Zuoxun, Wenzhu Zhang, Lei Ma, and Guijuan Wang. 2022. "Several Control Problems of a Class of Complex Nonlinear Systems Based on UDE" Mathematics 10, no. 8: 1313. https://doi.org/10.3390/math10081313
APA StyleWang, Z., Zhang, W., Ma, L., & Wang, G. (2022). Several Control Problems of a Class of Complex Nonlinear Systems Based on UDE. Mathematics, 10(8), 1313. https://doi.org/10.3390/math10081313