
Adaptive Sensorless PI+Passivity-Based Control of a Boost Converter Supplying an Unknown CPL

 ,
,  ,
,  ,
,  and
and 
Abstract
1. Introduction
1.1. General Context
1.2. Motivation
1.3. Literature Review
1.4. Contribution and Scope
- i.
- The formulation of a general nonlinear control design based on PBC theory, which regulates the voltage at the terminals of an unknown constant power load fed by a boost converter.
- ii.
- The addition of a PI design that maintains passive output to improve the convergence of the proposed control and remove the oscillations generated by the disturbance.
- iii.
- The combination of the immersion and invariance (I&I) and disturbance observer techniques to estimate the CPL and input voltage of the converter with the proposed controller, thus making it an adaptive, sensorless PI+PBC control, as verified by the simulation and experiment results.
1.5. Document Organization
2. Mathematical Modeling and Problem Formulation
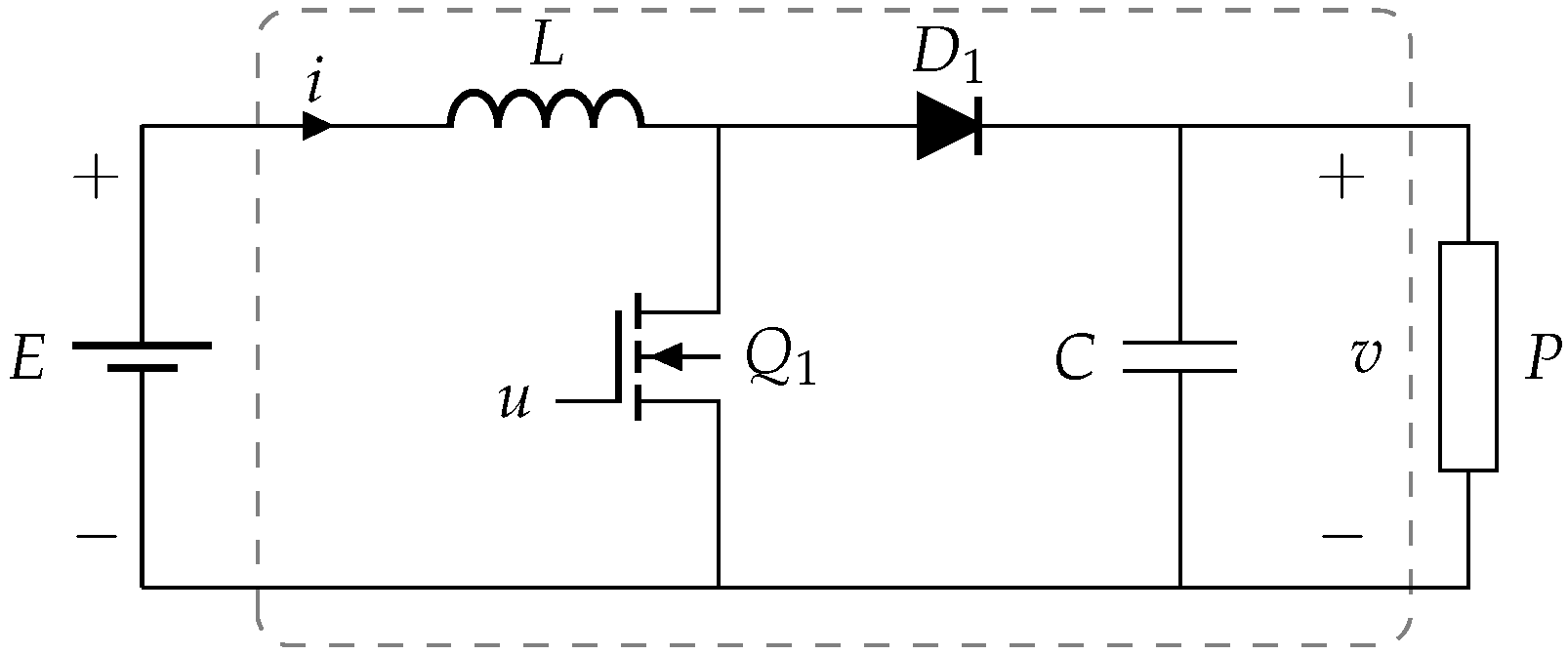
2.1. DC–DC Boost Converter Modeling
2.2. Control Problem Formulation
- i.
- To design a control law in order to regulate the output voltage v at the desired equilibrium point ;
- ii.
- To develop an observer to estimate the value of the CPL which achieves an adaptive control;
- iii.
- To propose an estimator for the input voltage E in order to obtain a sensorless control scheme.
3. Adaptive PI+PBC Design
- i.
- The design of a PI-PBC control that guarantees locally asymptotically stability at desired equilibrium point is described while assuming P and E as known parameters;
- ii.
- The immersion and invariance (I&I) technique is implemented to estimate the unknown CPL;
- iii.
- The proposed controller includes a nonlinear disturbance observer (DO) to observe the input voltage E;
- iv.
- By incorporating the I&I and DO techniques into the proposed controller, an adaptive sensorless PI+PBC control scheme is reached.
3.1. PI+PBC Design
3.1.1. PBC Design
3.1.2. PI Design
3.2. CPL Estimator
3.3. Input Voltage Estimator
3.4. Adaptive Sensorless Control Design
4. Results
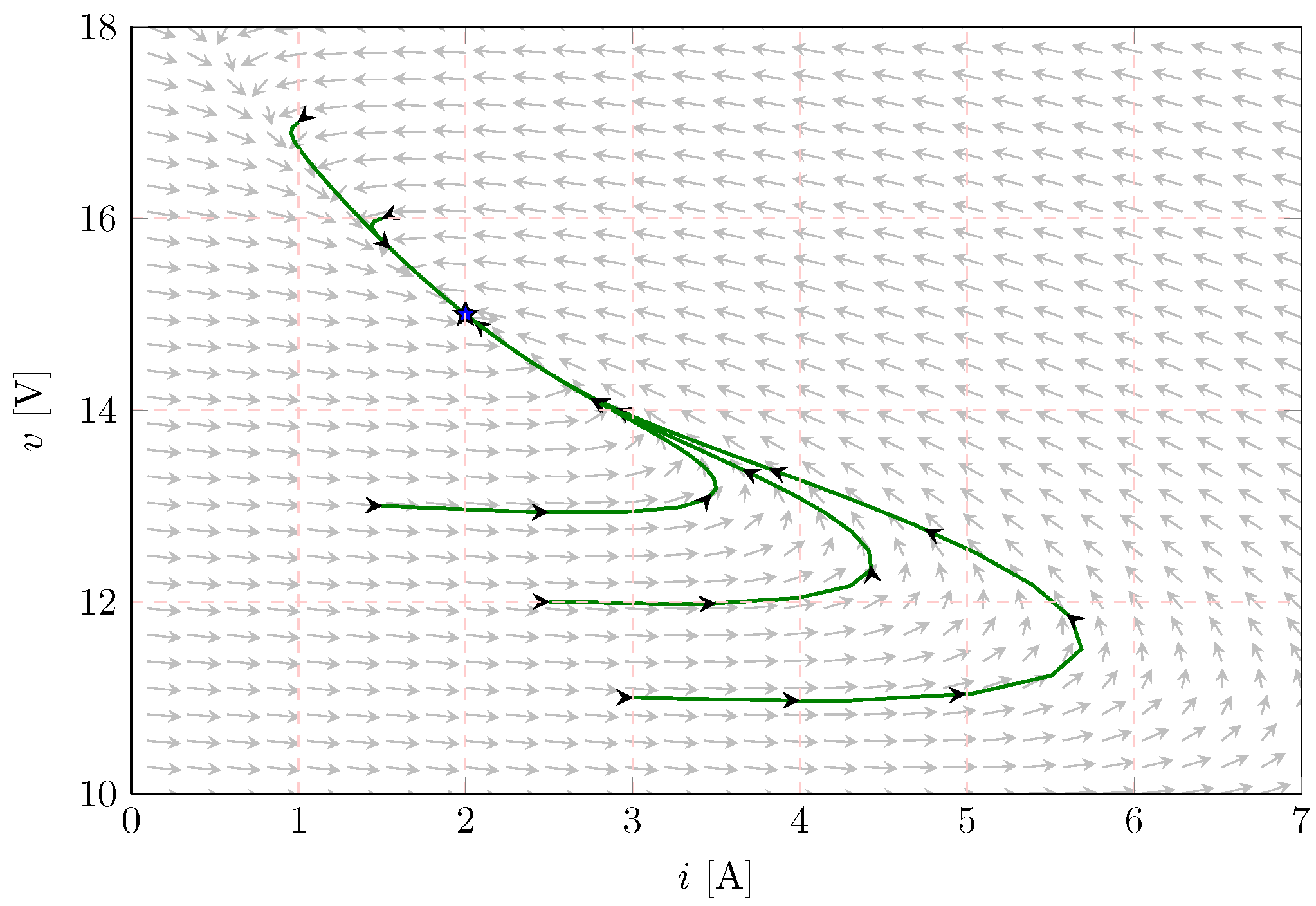
 ) for the boost converter is calculated with V, W, A, and V. Figure 4 also shows five trajectories for different initial points. It can be observed that the state variables move in ranges and . According to the figure, if , initially increases above its equilibrium point, while goes near the desired equilibrium point; meanwhile, if , and converge directly to their equilibrium points.
) for the boost converter is calculated with V, W, A, and V. Figure 4 also shows five trajectories for different initial points. It can be observed that the state variables move in ranges and . According to the figure, if , initially increases above its equilibrium point, while goes near the desired equilibrium point; meanwhile, if , and converge directly to their equilibrium points.General Remarks
- i.
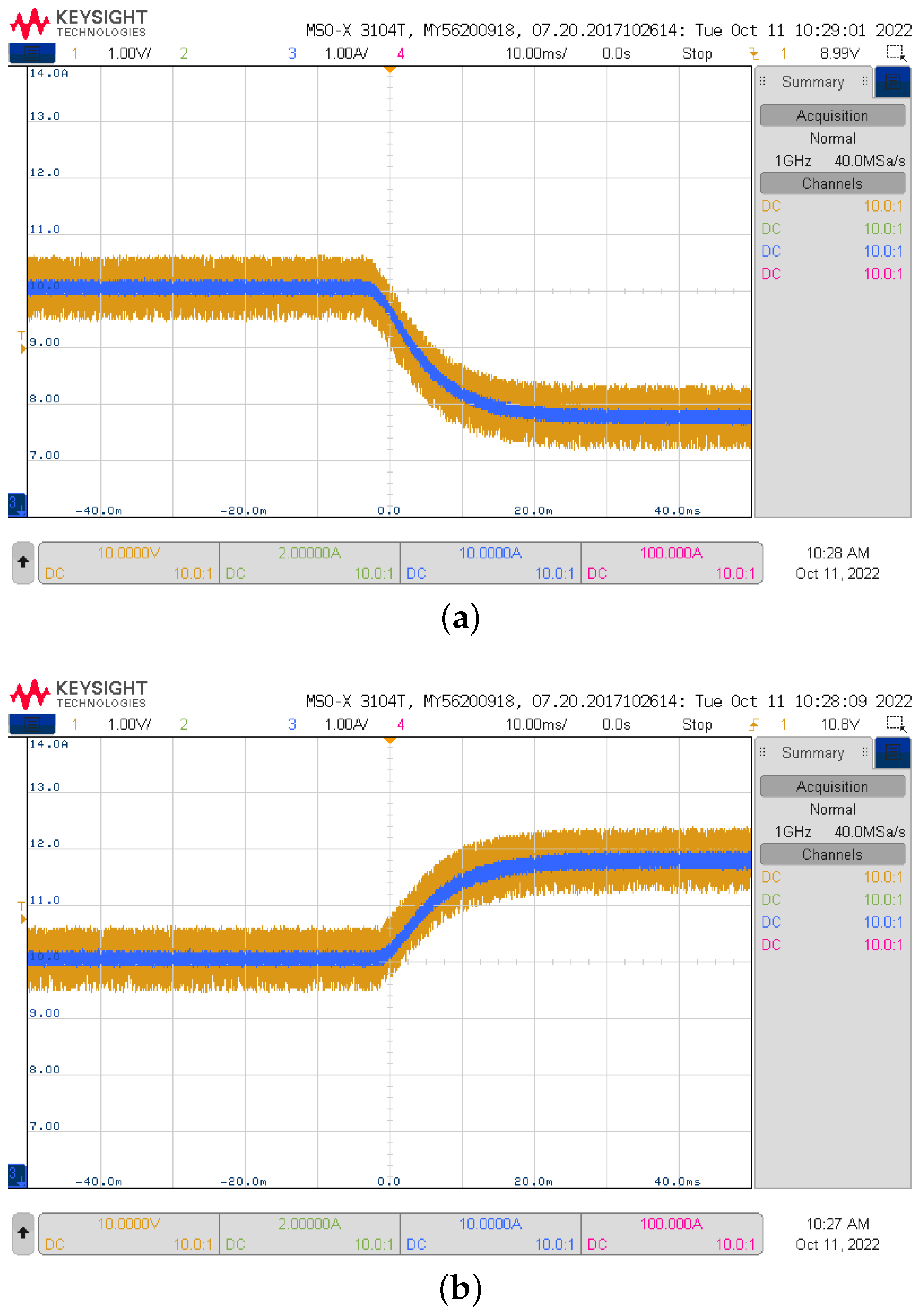
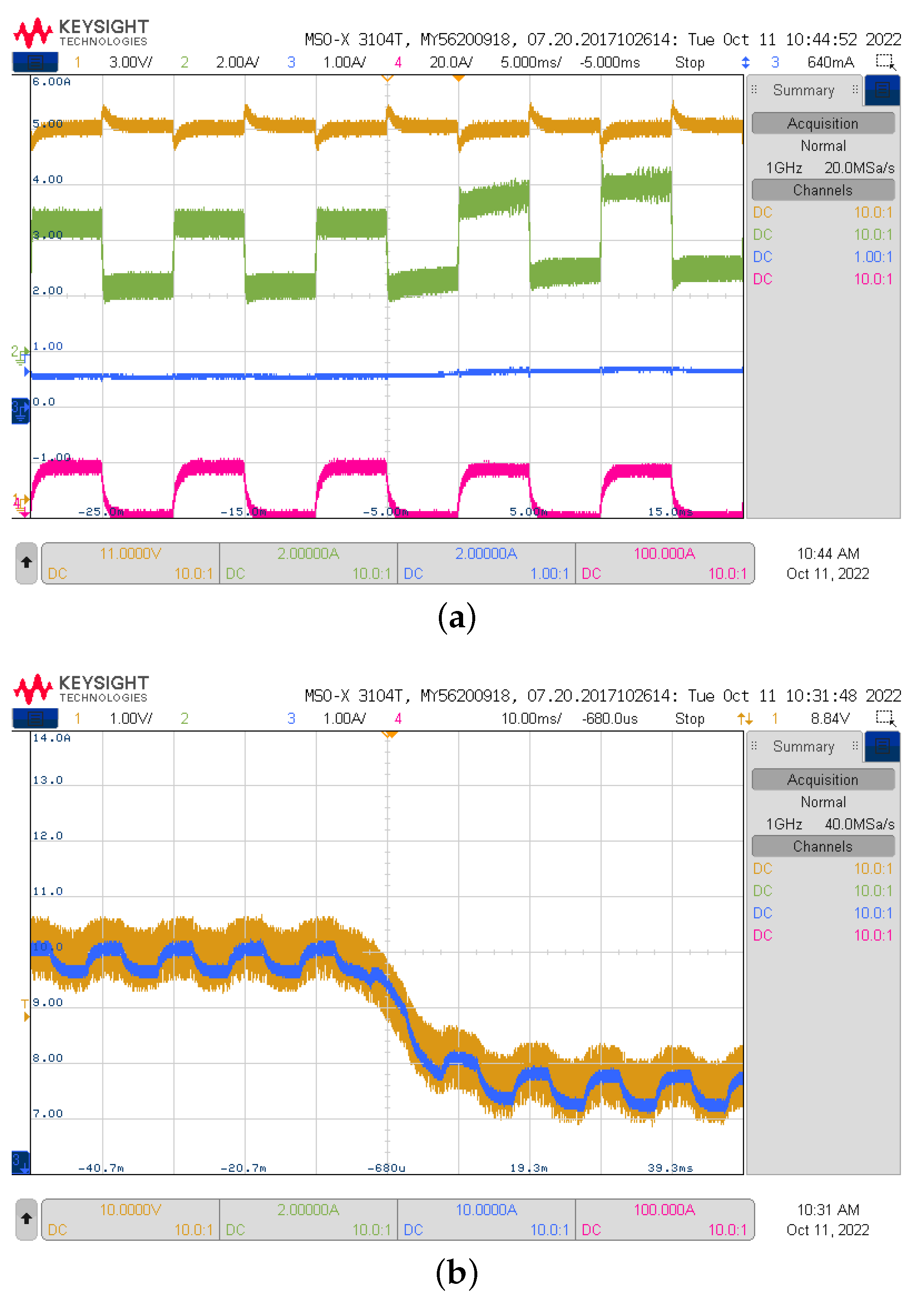
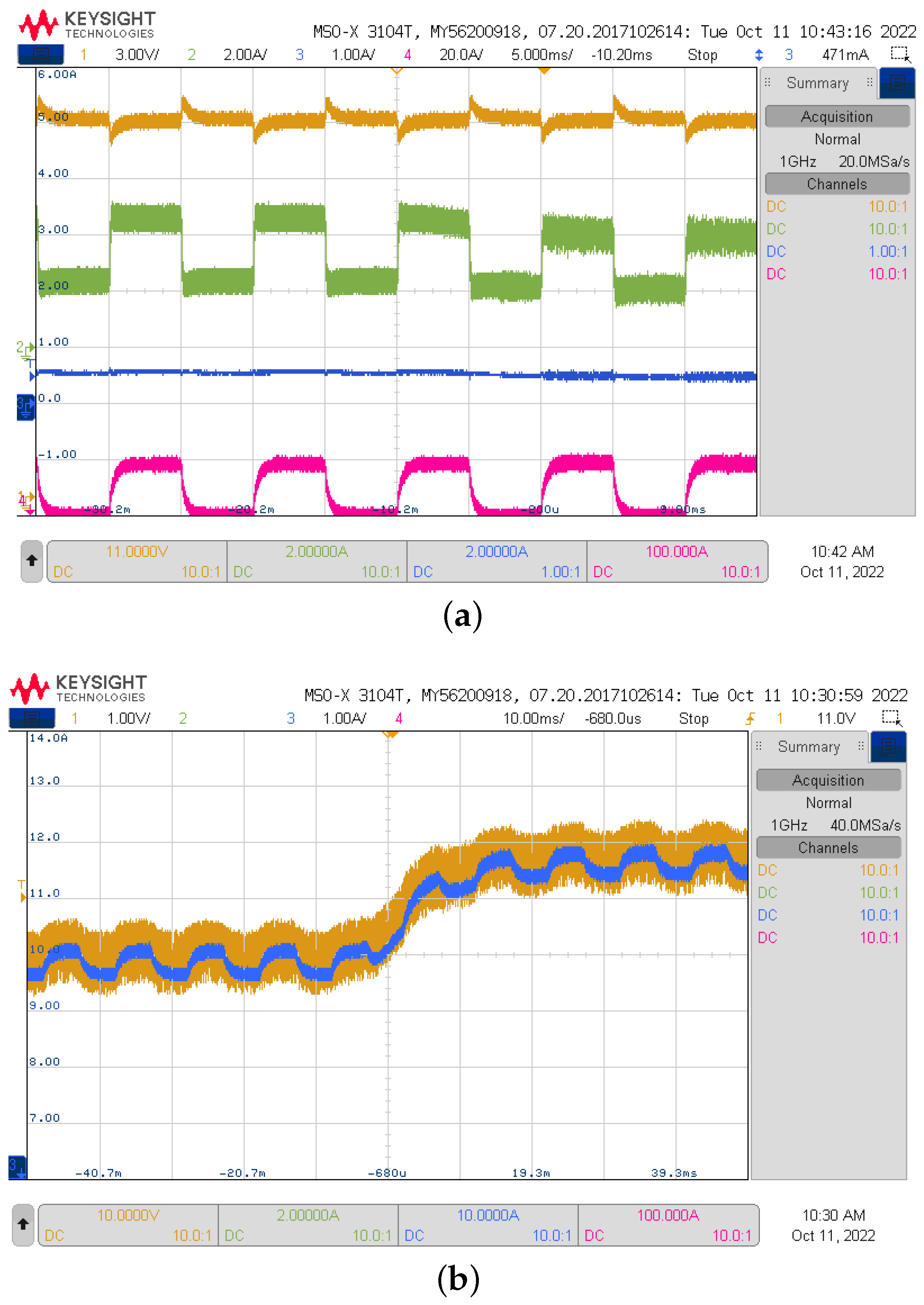
- The presented estimator to determine the behavior of the voltage input has an exponential convergence to the exact value when the behavior of the constant power load remains constant (see Figure 5), regardless of whether the voltage input increases or decreases from an initial value. Notwithstanding, when the load varies with a square form and the voltage input also increases or decreases, the behavior of the voltage input estimator follows the average behavior of the input, albeit with square-form oscillations (see Figure 6b and Figure 7b), which is expected because the DO estimator presented in Section 3.3 is dependent on the current measured at the inductor, which is also a function of the current provided to the load.
- ii.
- The load estimator presented in Figure 6a and Figure 7a converges exponentially to the exact value, as predicted by the I&I method presented in Section 3.2. This is also expected since the estimator depends only on the voltage measured at terminals of the load, which is the control variable that remains constant, with small variations each time the load changes.
- iii.
- In general, the proposed PI+PBC approach demonstrated easy tuning characteristics (two control gains), and fast asymptotic convergence to the desired voltage reference, regardless of whether the load current and the voltage input are measured or estimated. These characteristics make the proposed PI+PBC structure a robust control approach that deals with voltage control in the face of unknown CPLs, thus reducing the number of sensors required in the physical implementation layer.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Mathew, E.C.; Das, A. Integration of renewable energy sources with MVDC network. In Proceedings of the 2020 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Jaipur, India, 16–19 December 2020. [Google Scholar] [CrossRef]
- Bharatee, A.; Ray, P.K.; Subudhi, B.; Ghosh, A. Power Management Strategies in a Hybrid Energy Storage System Integrated AC/DC Microgrid: A Review. Energies 2022, 15, 7176. [Google Scholar] [CrossRef]
- Silani, A.; Cucuzzella, M.; Scherpen, J.M.; Yazdanpanah, M.J. Robust output regulation for voltage control in DC networks with time-varying loads. Automatica 2022, 135, 109997. [Google Scholar] [CrossRef]
- Iskender, I.; Genc, N. Power Electronic Converters in DC Microgrid. In Power Systems; Springer International Publishing: Berlin/Heidelberg, Germany, 2019; pp. 115–137. [Google Scholar] [CrossRef]
- Ramos-Paja, C.A.; Montoya, O.D.; Grisales-Noreña, L.F. Photovoltaic System for Microinverter Applications Based on a Non-Electrolytic-Capacitor Boost Converter and a Sliding-Mode Controller. Electronics 2022, 11, 2923. [Google Scholar] [CrossRef]
- Xie, D.; Wang, L.; Zhang, Z.; Wang, S.; Kang, L.; Yao, J. Photovoltaic Energy Storage System Based on Bidirectional LLC Resonant Converter Control Technology. Energies 2022, 15, 6436. [Google Scholar] [CrossRef]
- Prieto-Araujo, E.; Bolboceanu, D.B.; Sanchez-Sanchez, E.; Gomis-Bellmunt, O. Design methodology of the primary droop voltage control for DC microgrids. In Proceedings of the 2017 IEEE Second International Conference on DC Microgrids (ICDCM), Nuremburg, Germany, 27–29 June 2017. [Google Scholar] [CrossRef]
- Gao, F.; Kang, R.; Cao, J.; Yang, T. Primary and secondary control in DC microgrids: A review. J. Mod. Power Syst. Clean Energy 2018, 7, 227–242. [Google Scholar] [CrossRef]
- Moayedi, S.; Davoudi, A. Distributed Tertiary Control of DC Microgrid Clusters. IEEE Trans. Power Electron. 2016, 31, 1717–1733. [Google Scholar] [CrossRef]
- Oucheriah, S. Nonlinear control of the boost converter subject to unknown constant power load and parasitics. Int. J. Electron. Lett. 2022, 0, 1–11. [Google Scholar] [CrossRef]
- Emadi, A.; Khaligh, A.; Rivetta, C.; Williamson, G. Constant Power Loads and Negative Impedance Instability in Automotive Systems: Definition, Modeling, Stability, and Control of Power Electronic Converters and Motor Drives. IEEE Trans. Veh. Technol. 2006, 55, 1112–1125. [Google Scholar] [CrossRef]
- Shi, L.; Lei, W.; Li, Z.; Huang, J.; Cui, Y.; Wang, Y. Bilinear Discrete-Time Modeling and Stability Analysis of the Digitally Controlled Dual Active Bridge Converter. IEEE Trans. Power Electron. 2017, 32, 8787–8799. [Google Scholar] [CrossRef]
- Chang, Y.; Zhou, P.; Niu, B.; Wang, H.; Xu, N.; Alassafi, M.O.; Ahmad, A.M. Switched-observer-based adaptive output-feedback control design with unknown gain for pure-feedback switched nonlinear systems via average dwell time. Int. J. Syst. Sci. 2021, 52, 1731–1745. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, H.; Niu, B.; Zhang, L.; Ahmad, A.M. Sliding-mode surface-based adaptive actor-critic optimal control for switched nonlinear systems with average dwell time. Inf. Sci. 2021, 580, 756–774. [Google Scholar] [CrossRef]
- Chen, Q.X.; Chang, X.H. Resilient filter of nonlinear network systems with dynamic event-triggered mechanism and hybrid cyber attack. Appl. Math. Comput. 2022, 434, 127419. [Google Scholar] [CrossRef]
- Hamidi, S.A.; Nasiri, A. Stability analysis of a DC–DC converter for battery energy storage system feeding CPL. In Proceedings of the 2015 IEEE International Telecommunications Energy Conference (INTELEC), Osaka, Japan, 18–22 October 2015; pp. 1–5. [Google Scholar]
- Singh, S.; Fulwani, D.; Kumar, V. Robust sliding-mode control of dc/dc boost converter feeding a constant power load. IET Power Electron. 2015, 8, 1230–1237. [Google Scholar] [CrossRef]
- Wu, J.; Lu, Y. Adaptive backstepping sliding mode control for boost converter with constant power load. IEEE Access 2019, 7, 50797–50807. [Google Scholar] [CrossRef]
- Martinez-Treviño, B.A.; El Aroudi, A.; Vidal-Idiarte, E.; Cid-Pastor, A.; Martinez-Salamero, L. Sliding-mode control of a boost converter under constant power loading conditions. IET Power Electron. 2019, 12, 521–529. [Google Scholar] [CrossRef]
- He, W.; Li, S.; Yang, J.; Wang, Z. Incremental passivity based control for DC–DC boost converter with circuit parameter perturbations using nonlinear disturbance observer. In Proceedings of the IECON 2016-42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016; pp. 1353–1358. [Google Scholar]
- He, W.; Li, S.; Yang, J.; Wang, Z. Incremental passivity based control for DC–DC boost converters under time-varying disturbances via a generalized proportional integral observer. J. Power Electron. 2018, 18, 147–159. [Google Scholar]
- Farsizadeh, H.; Gheisarnejad, M.; Mosayebi, M.; Rafiei, M.; Khooban, M.H. An intelligent and fast controller for DC/DC converter feeding CPL in a DC microgrid. IEEE Trans. Circuits Syst. II Express Briefs 2019, 67, 1104–1108. [Google Scholar] [CrossRef]
- He, W.; Shang, Y. Finite-Time Parameter Observer-Based Sliding Mode Control for a DC/DC Boost Converter with Constant Power Loads. Electronics 2022, 11, 819. [Google Scholar] [CrossRef]
- Zhang, X.; He, W.; Zhang, Y. An Adaptive Output Feedback Controller for Boost Converter. Electronics 2022, 11, 905. [Google Scholar] [CrossRef]
- Zhang, X.; Martinez-Lopez, M.; He, W.; Shang, Y.; Jiang, C.; Moreno-Valenzuela, J. Sensorless Control for DC–DC Boost Converter via Generalized Parameter Estimation-Based Observer. Appl. Sci. 2021, 11, 7761. [Google Scholar] [CrossRef]
- Serra, F.M.; Magaldi, G.L.; Fernandez, L.M.; Larregay, G.O.; CH, D.A. IDA-PBC controller of a DC–DC boost converter for continuous and discontinuous conduction mode. IEEE Lat. Am. Trans. 2018, 16, 52–58. [Google Scholar] [CrossRef]
- Gil-González, W.; Montoya, O.D.; Espinosa-Perez, G. Adaptive control for second-order DC–DC converters: PBC approach. In Modeling, Operation, and Analysis of DC Grids; Elsevier: Amsterdam, The Netherlands, 2021; pp. 289–310. [Google Scholar]
- AL-Nussairi, M.K.; Bayindir, R.; Padmanaban, S.; Mihet-Popa, L.; Siano, P. Constant Power Loads (CPL) with Microgrids: Problem Definition, Stability Analysis and Compensation Techniques. Energies 2017, 10, 1656. [Google Scholar] [CrossRef]
- Ortega, R.; Perez, J.A.L.; Nicklasson, P.J.; Sira-Ramirez, H.J. Passivity-Based Control of Euler-Lagrange Systems: Mechanical, Electrical and Electromechanical Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Ortega, R.; Van Der Schaft, A.; Castanos, F.; Astolfi, A. Control by interconnection and standard passivity-based control of port-Hamiltonian systems. IEEE Trans. Autom. Control 2008, 53, 2527–2542. [Google Scholar] [CrossRef]
- Harandi, M.R.J.; Taghirad, H.D. On the matching equations of kinetic energy shaping in ida-pbc. J. Frankl. Inst. 2021, 358, 8639–8655. [Google Scholar] [CrossRef]
- Cisneros, R.; Gao, R.; Ortega, R.; Husain, I. A PI+ passivity-based control of a wind energy conversion system enabled with a solid-state transformer. Int. J. Control 2021, 94, 2453–2463. [Google Scholar] [CrossRef]
- Krstic, M.; Kokotovic, P.V.; Kanellakopoulos, I. Nonlinear and Adaptive Control Design; John Wiley & Sons Inc.: Hoboken, NJ, USA, 1995. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Description | Type/Value |
|---|---|---|
| Power MOSFET | IRFB4110 | |
| Schottky Power Diode | RURG8060 | |
| L | Inductor | Wurth Elektronik 74435584700, 47 H |
| C | Multilayer Ceramic Capacitor | TDK C5750X7S2A106M230KB, F |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Riffo, S.; Gil-González, W.; Montoya, O.D.; Restrepo, C.; Muñoz, J. Adaptive Sensorless PI+Passivity-Based Control of a Boost Converter Supplying an Unknown CPL. Mathematics 2022, 10, 4321. https://doi.org/10.3390/math10224321
Riffo S, Gil-González W, Montoya OD, Restrepo C, Muñoz J. Adaptive Sensorless PI+Passivity-Based Control of a Boost Converter Supplying an Unknown CPL. Mathematics. 2022; 10(22):4321. https://doi.org/10.3390/math10224321
Chicago/Turabian StyleRiffo, Sebastián, Walter Gil-González, Oscar Danilo Montoya, Carlos Restrepo, and Javier Muñoz. 2022. "Adaptive Sensorless PI+Passivity-Based Control of a Boost Converter Supplying an Unknown CPL" Mathematics 10, no. 22: 4321. https://doi.org/10.3390/math10224321
APA StyleRiffo, S., Gil-González, W., Montoya, O. D., Restrepo, C., & Muñoz, J. (2022). Adaptive Sensorless PI+Passivity-Based Control of a Boost Converter Supplying an Unknown CPL. Mathematics, 10(22), 4321. https://doi.org/10.3390/math10224321