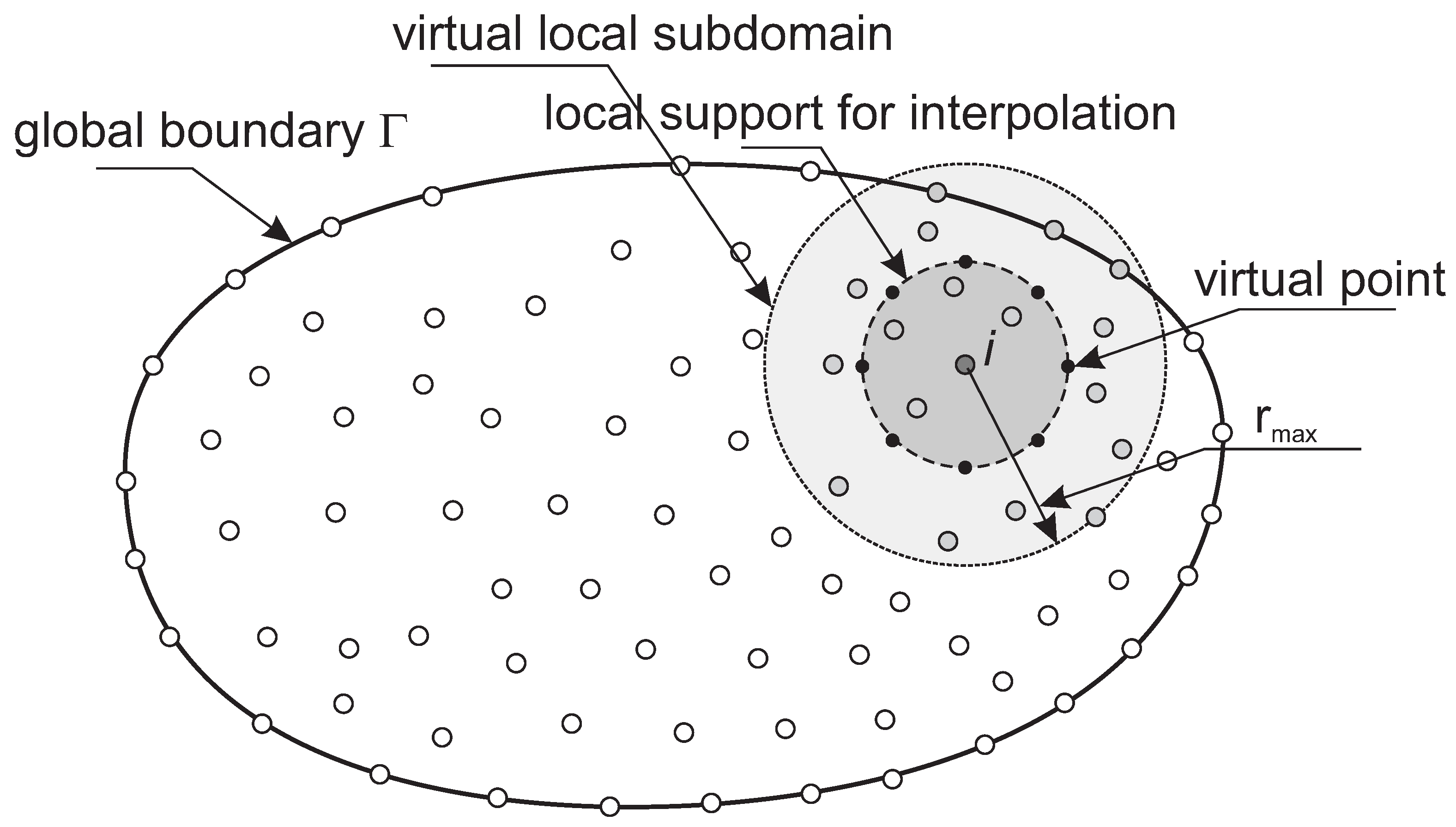
Figure 1.
Virtual and supporting nodes in the domain .
Figure 1.
Virtual and supporting nodes in the domain .
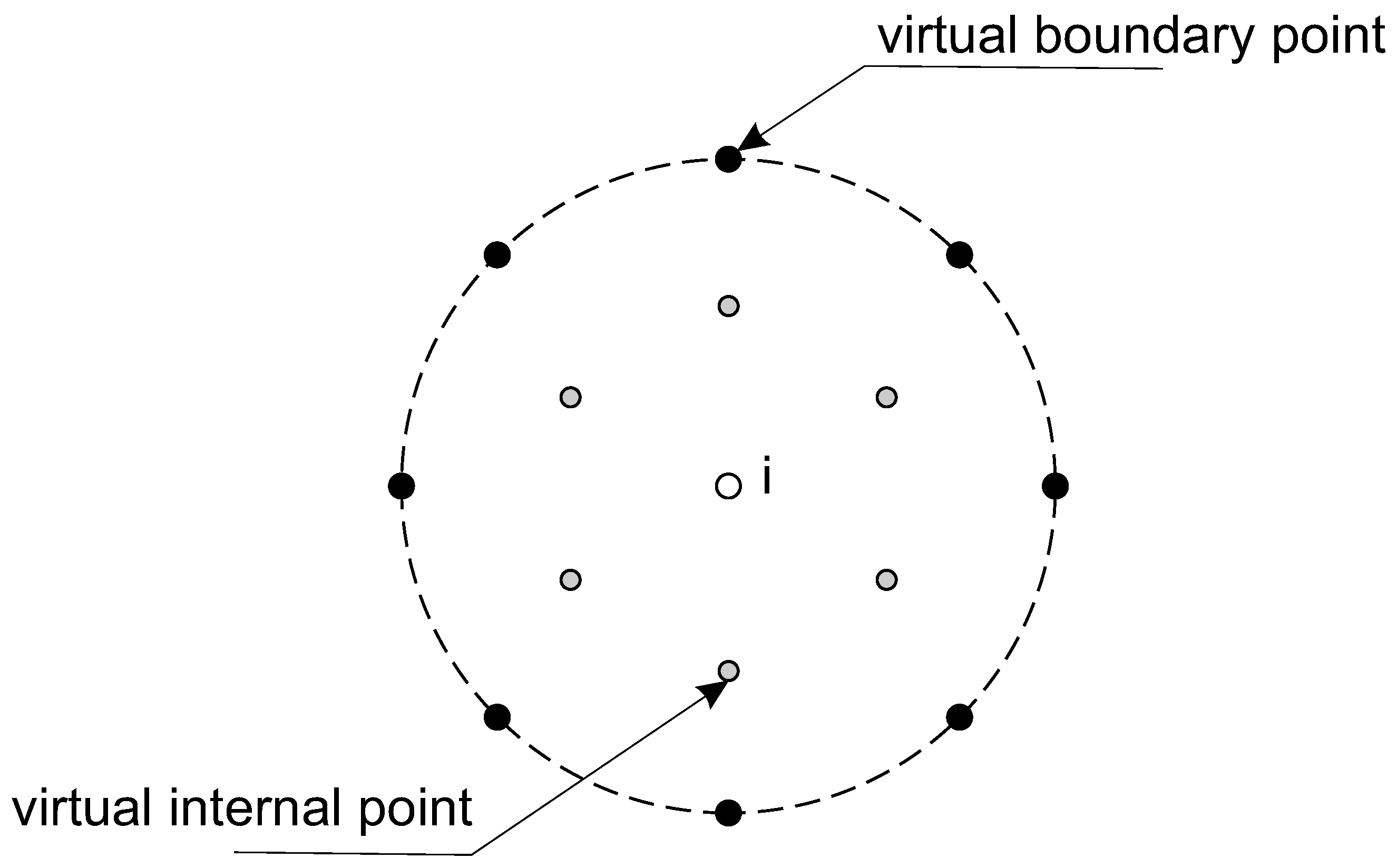
Figure 2.
Virtual subdomain around the node i.
Figure 2.
Virtual subdomain around the node i.
Figure 3.
Example No. 1—irregular mesh, absolute errors in the profile x = y.
Figure 3.
Example No. 1—irregular mesh, absolute errors in the profile x = y.
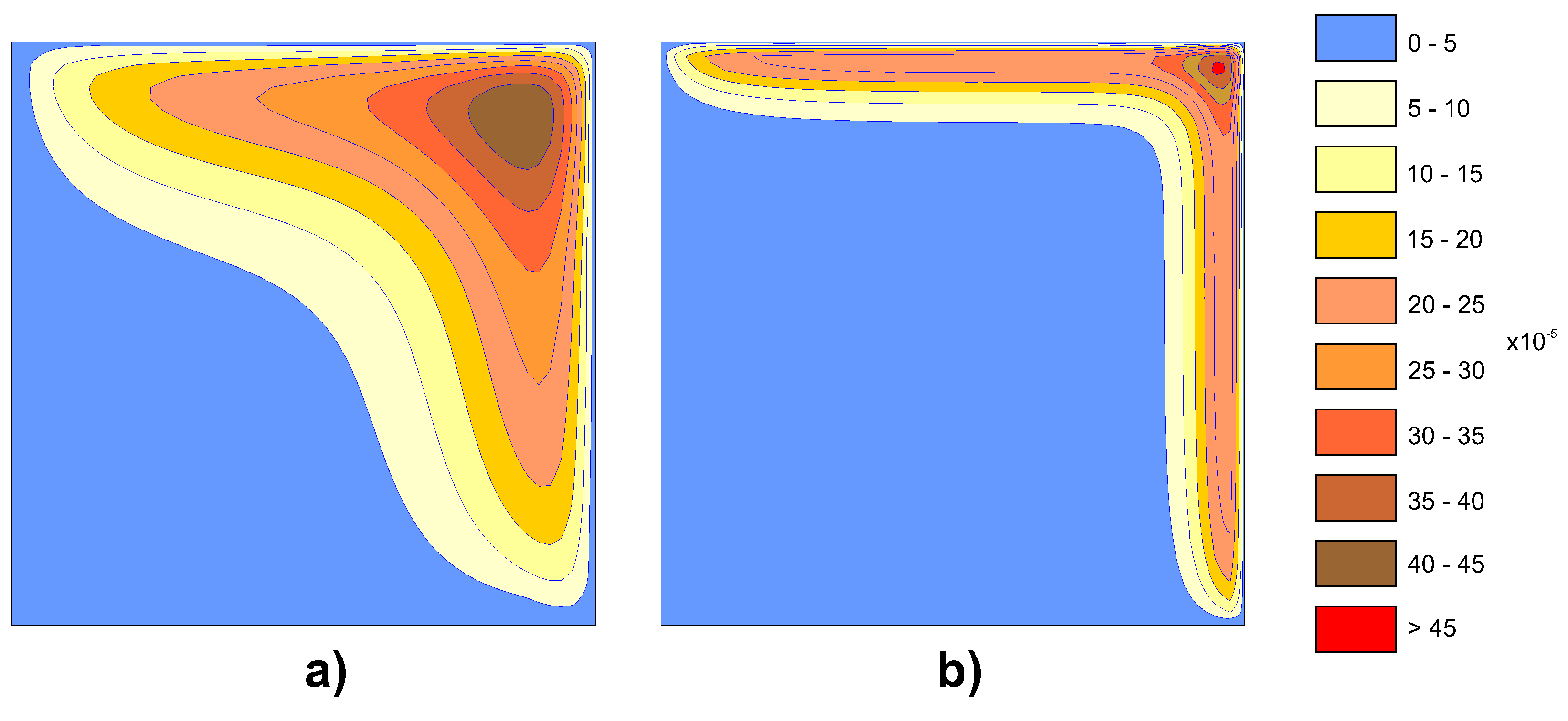
Figure 4.
Example No. 1—contours of absolute errors, (a) Pe = 10, (b) Pe = 30.
Figure 4.
Example No. 1—contours of absolute errors, (a) Pe = 10, (b) Pe = 30.
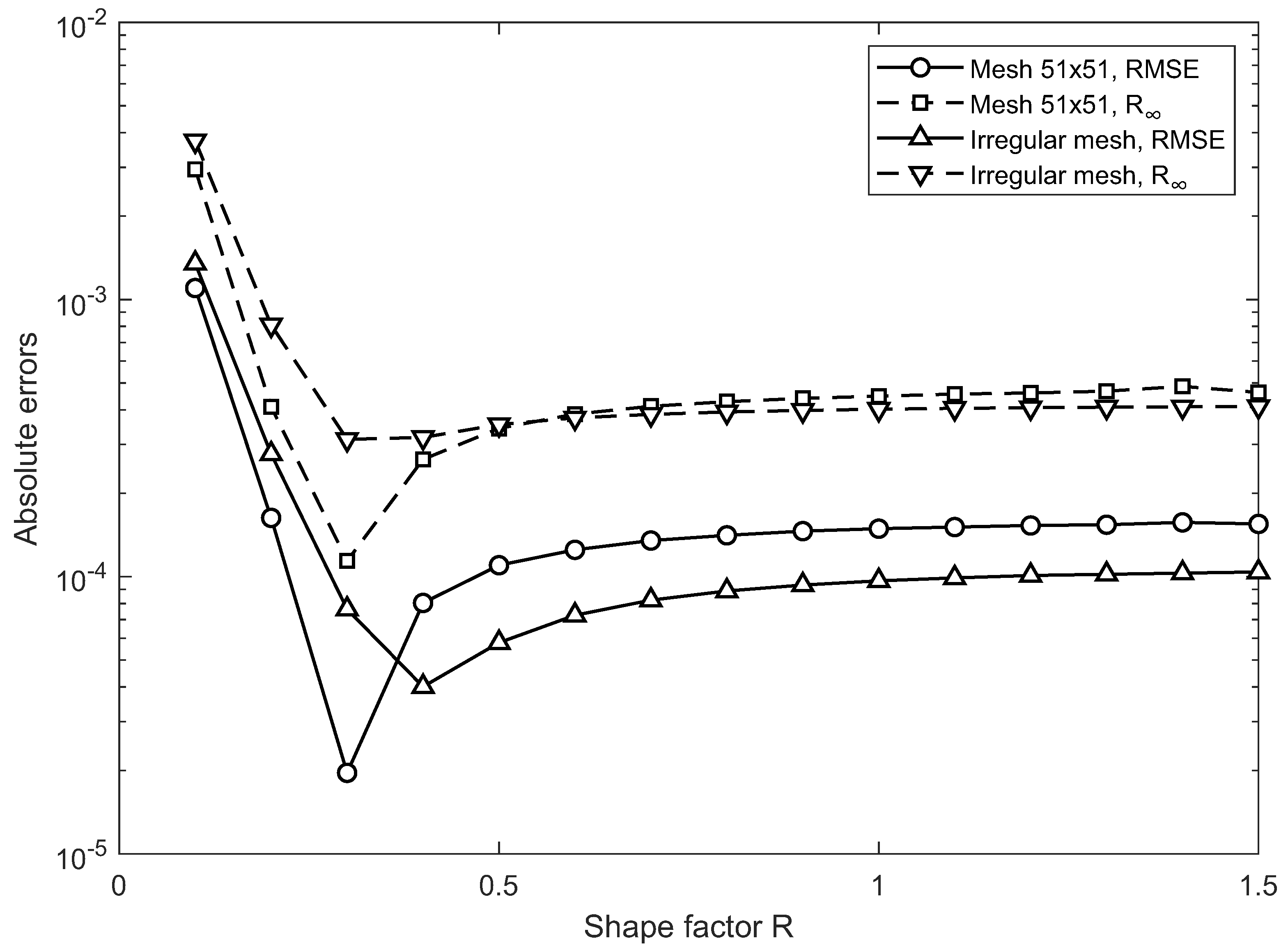
Figure 5.
Example No. 1—RMSE and as functions of the shape factor R.
Figure 5.
Example No. 1—RMSE and as functions of the shape factor R.
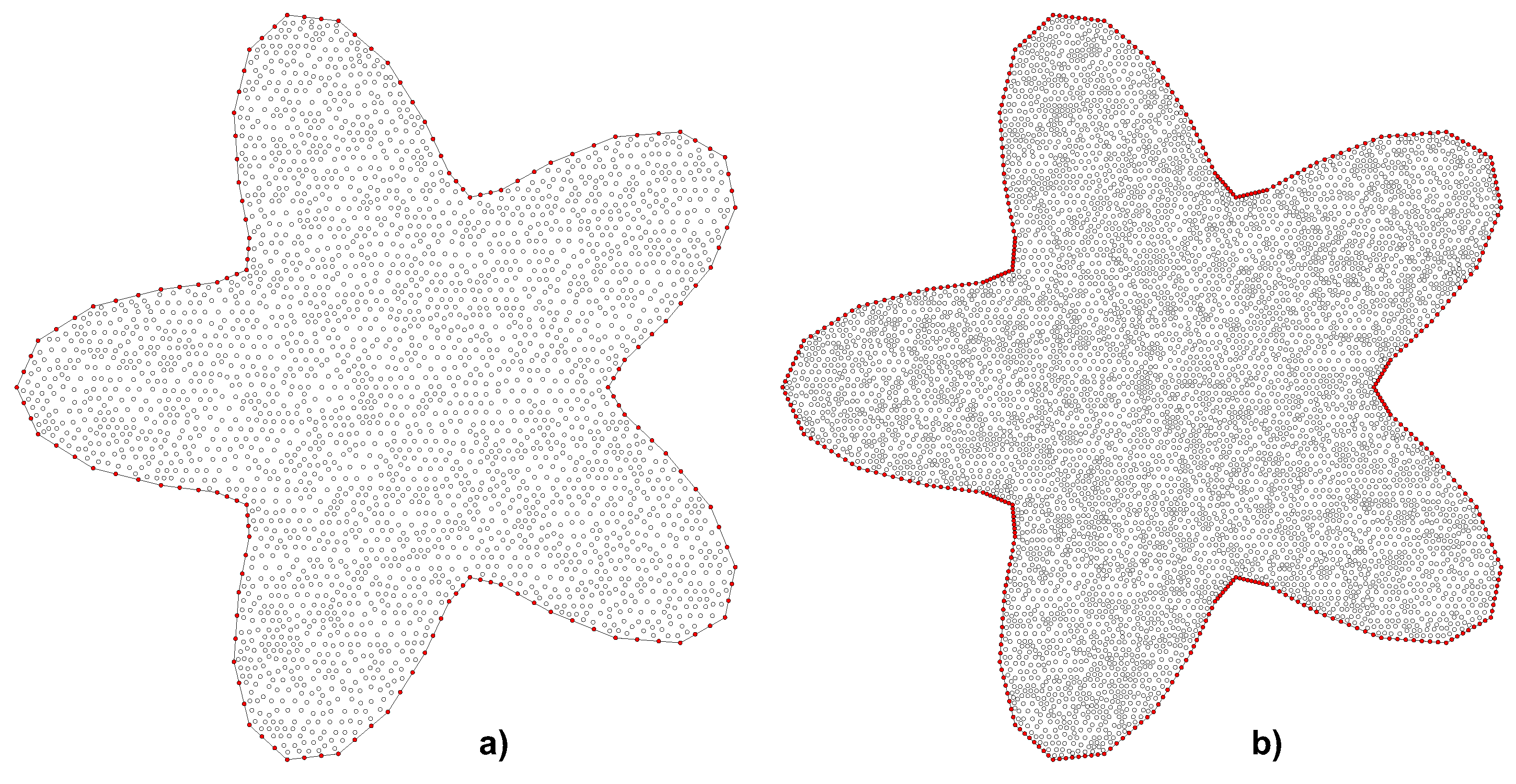
Figure 6.
Example No. 2—irregular meshes: (a) 3216 points, (b) 6530 points.
Figure 6.
Example No. 2—irregular meshes: (a) 3216 points, (b) 6530 points.
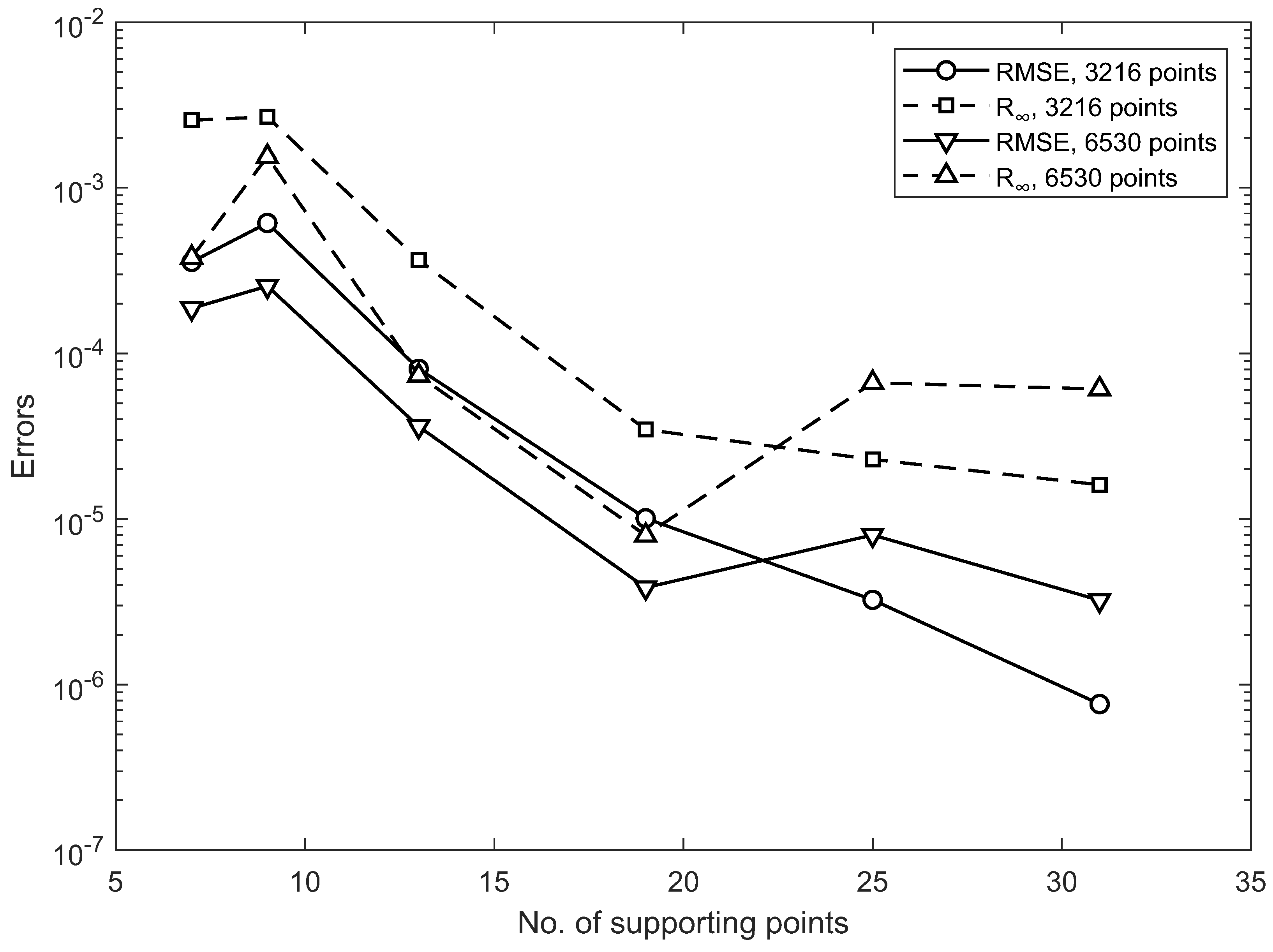
Figure 7.
Example No. 2—course of RMSE and for different numbers of supporting points.
Figure 7.
Example No. 2—course of RMSE and for different numbers of supporting points.
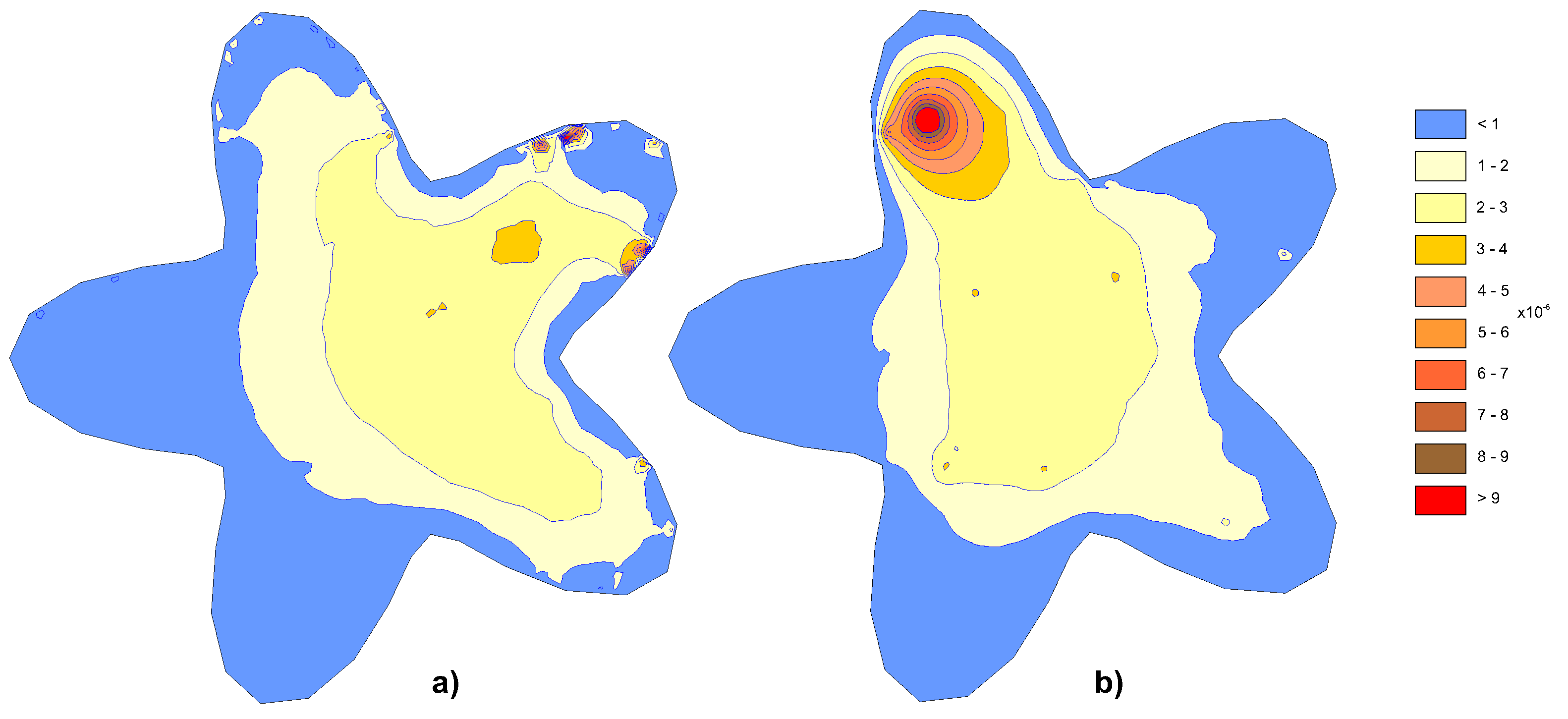
Figure 8.
Example No. 2—contours of absolute errors, (a) 3216 points, (b) 6530 points.
Figure 8.
Example No. 2—contours of absolute errors, (a) 3216 points, (b) 6530 points.
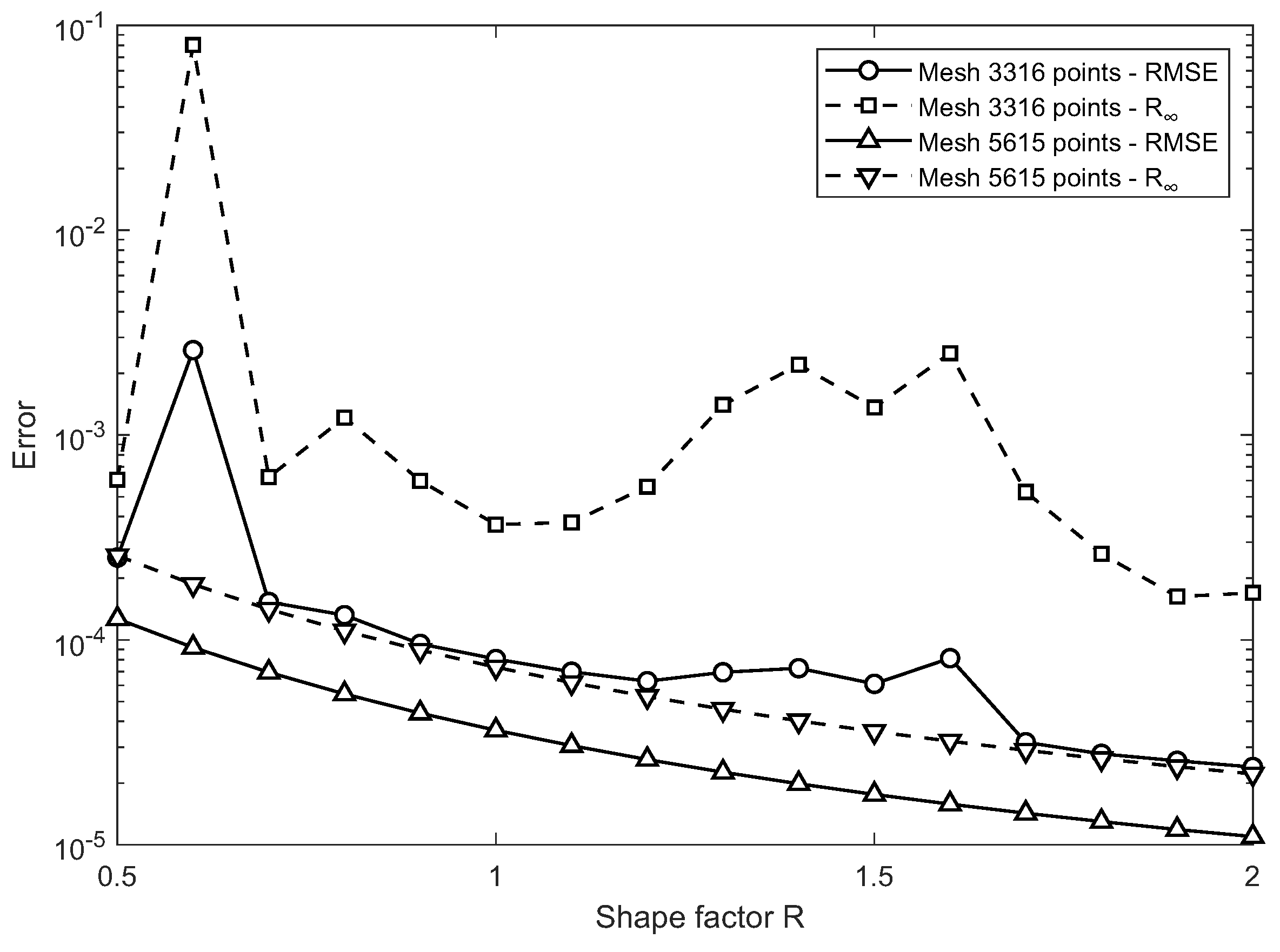
Figure 9.
Example No. 2—RMSE and as functions of the shape factor R.
Figure 9.
Example No. 2—RMSE and as functions of the shape factor R.
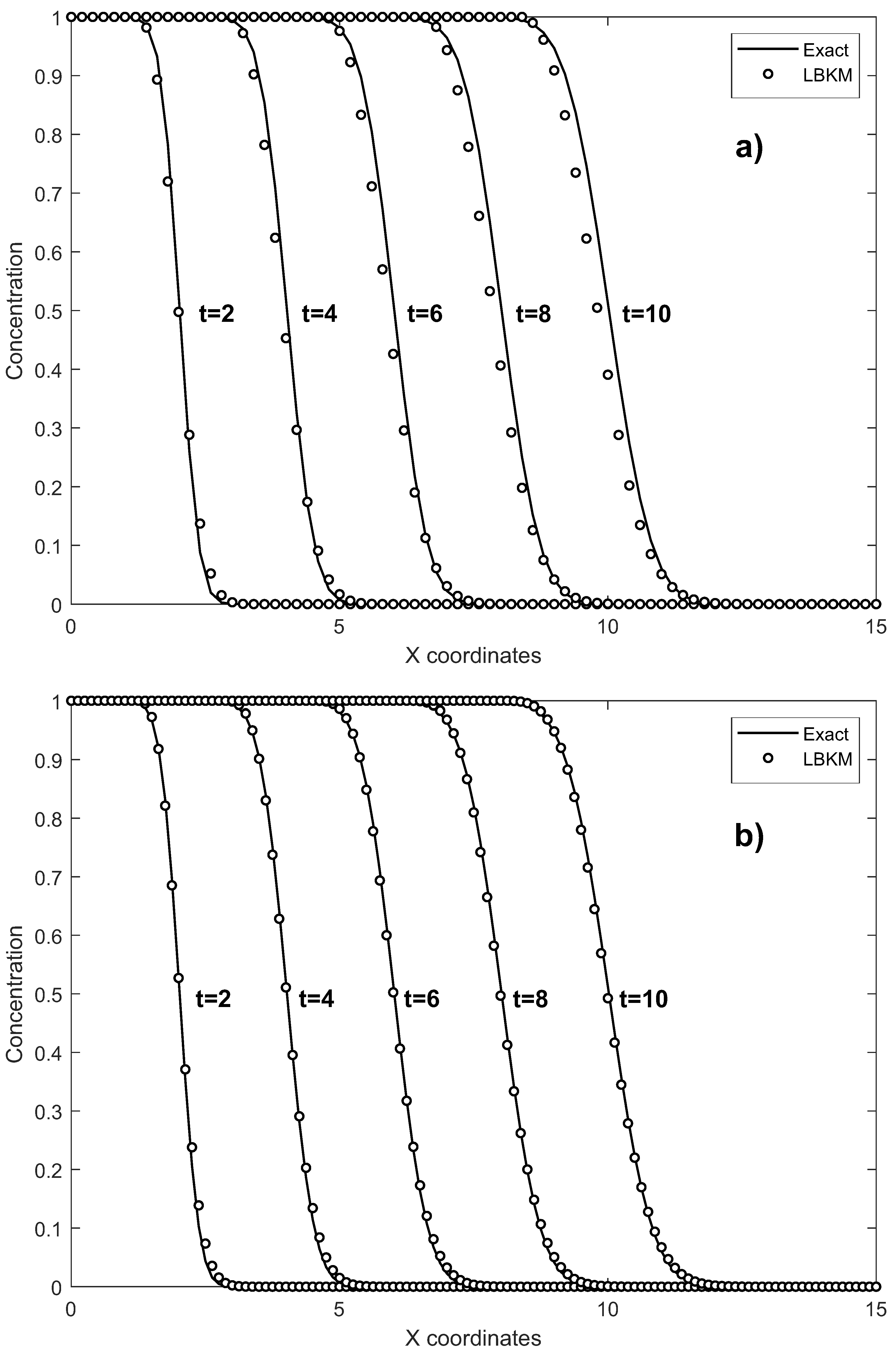
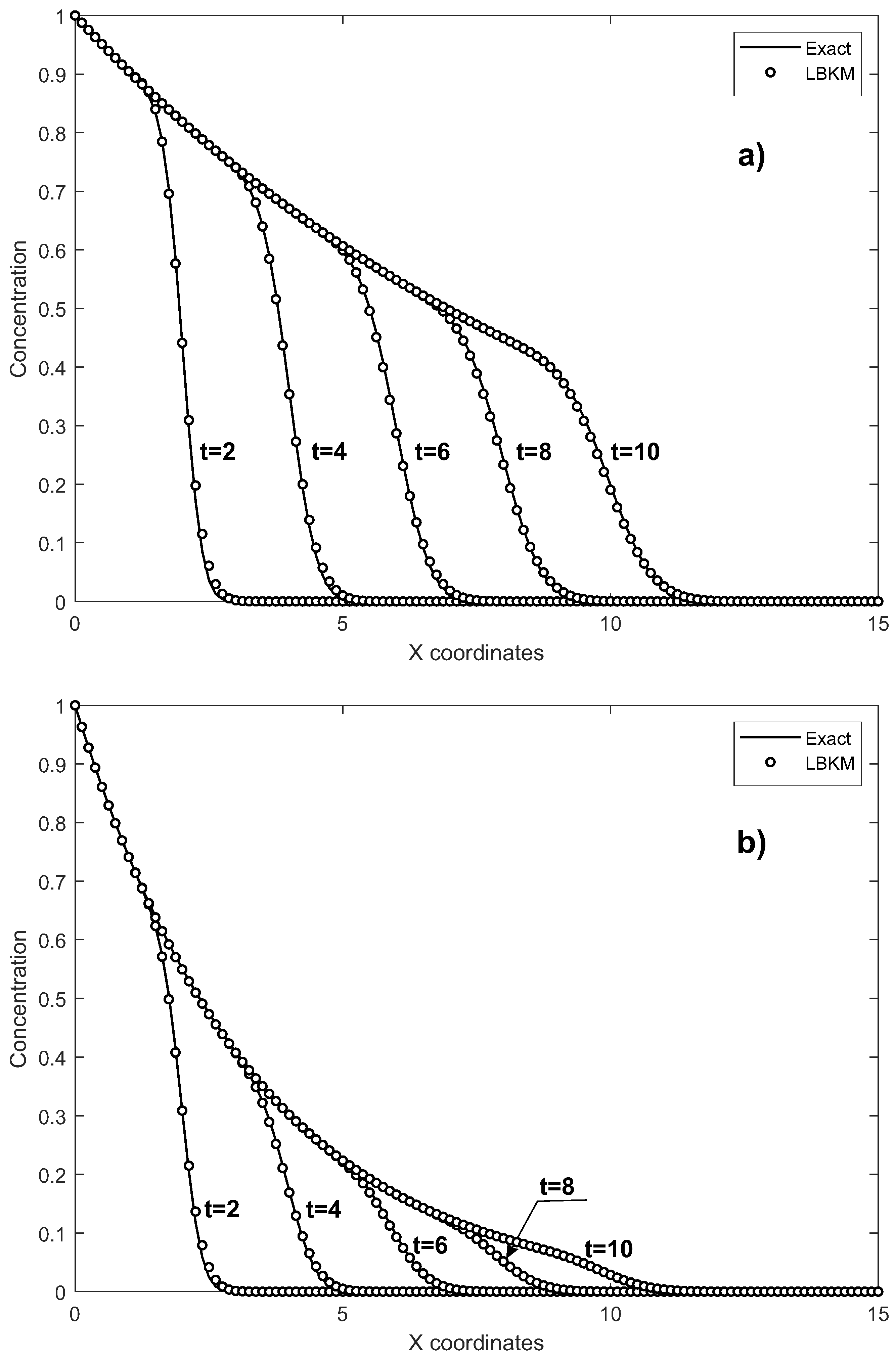
Figure 10.
Example No. 3—concentration profiles for Pe = 1000: (a) Grid , (b) Grid .
Figure 10.
Example No. 3—concentration profiles for Pe = 1000: (a) Grid , (b) Grid .
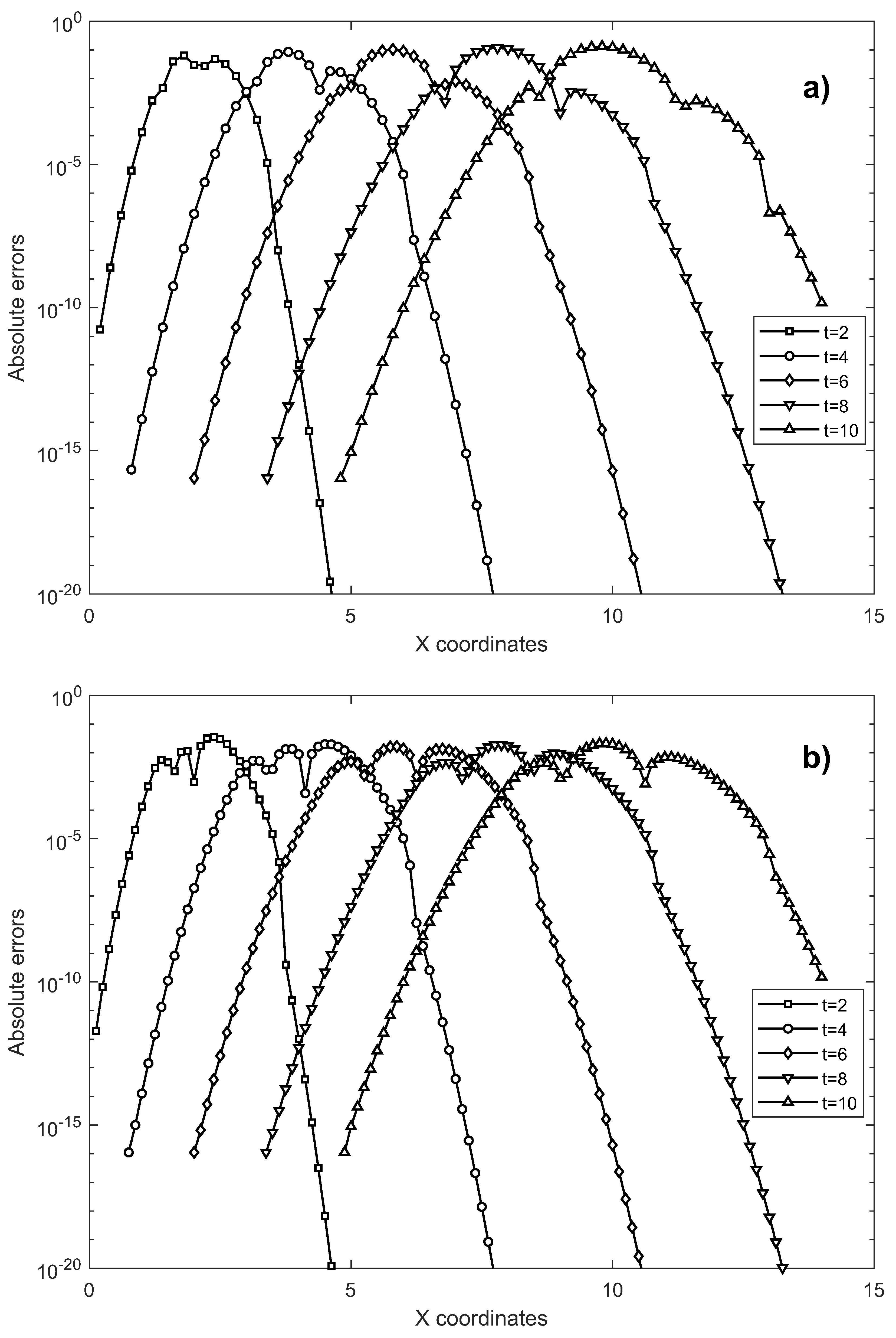
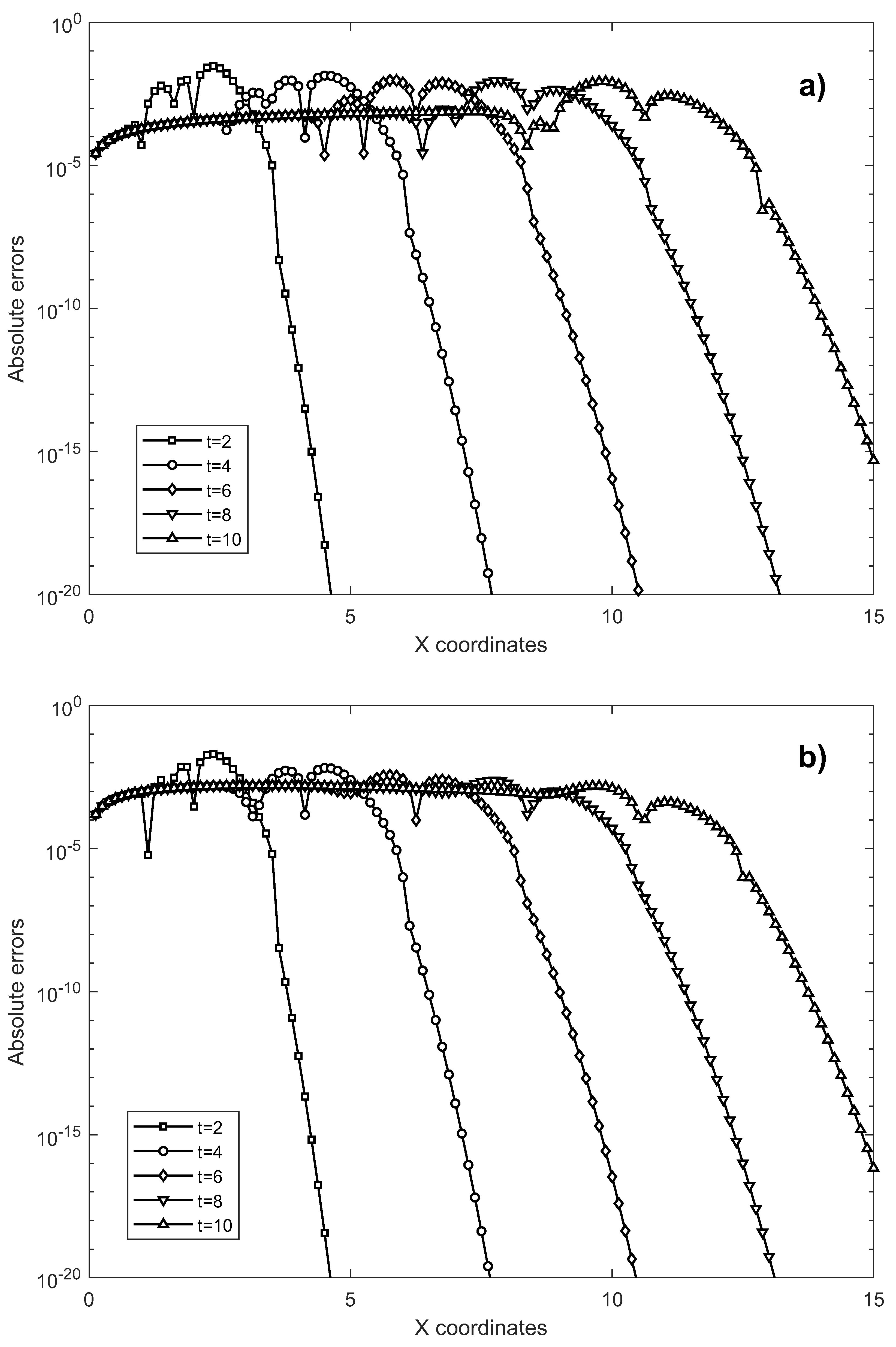
Figure 11.
Example No. 3—absolute errors for Pe = 1000, (a) Grid , (b) Grid .
Figure 11.
Example No. 3—absolute errors for Pe = 1000, (a) Grid , (b) Grid .
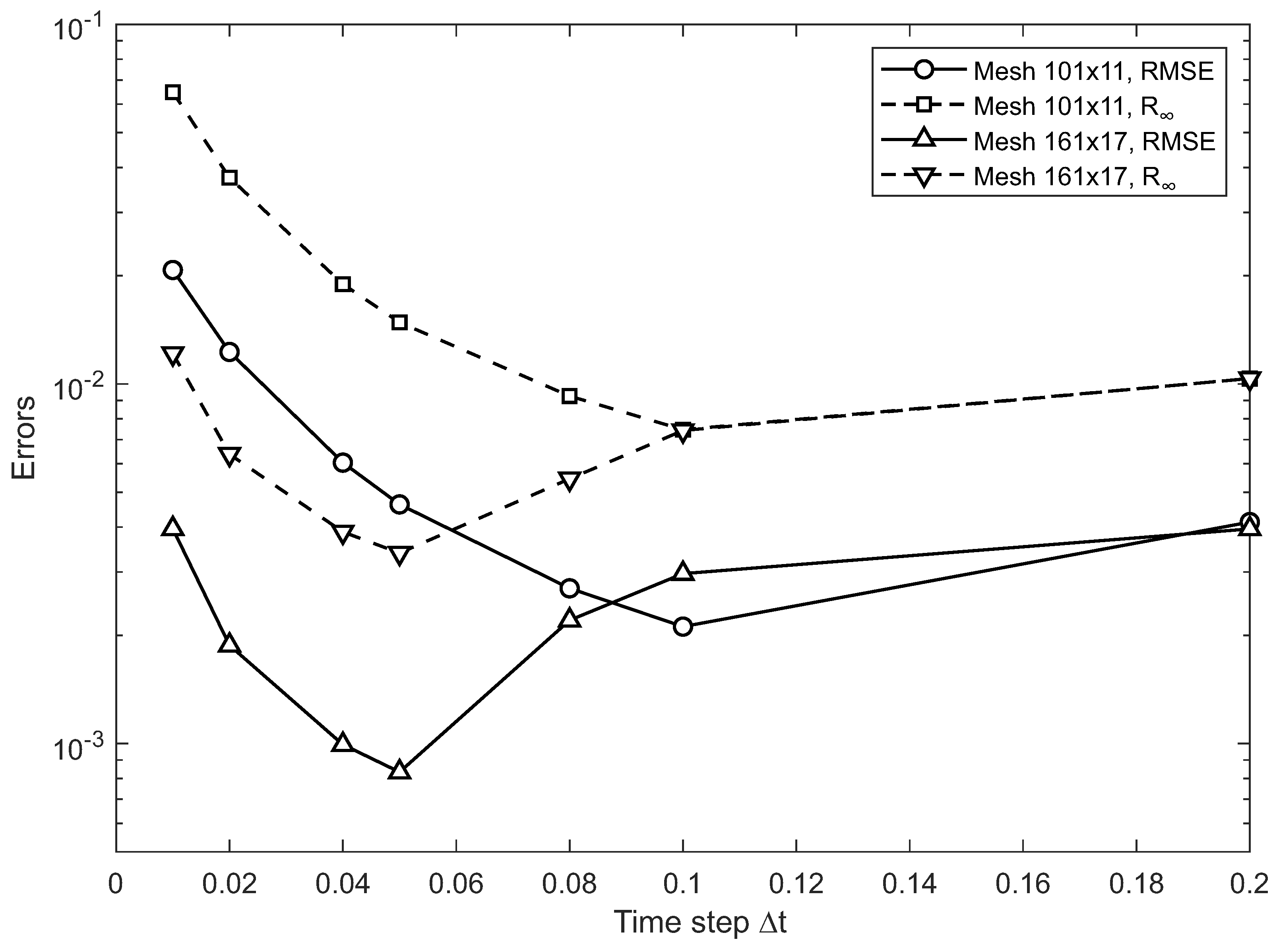
Figure 12.
Example No. 3—RMSE and as functions of the time step t.
Figure 12.
Example No. 3—RMSE and as functions of the time step t.
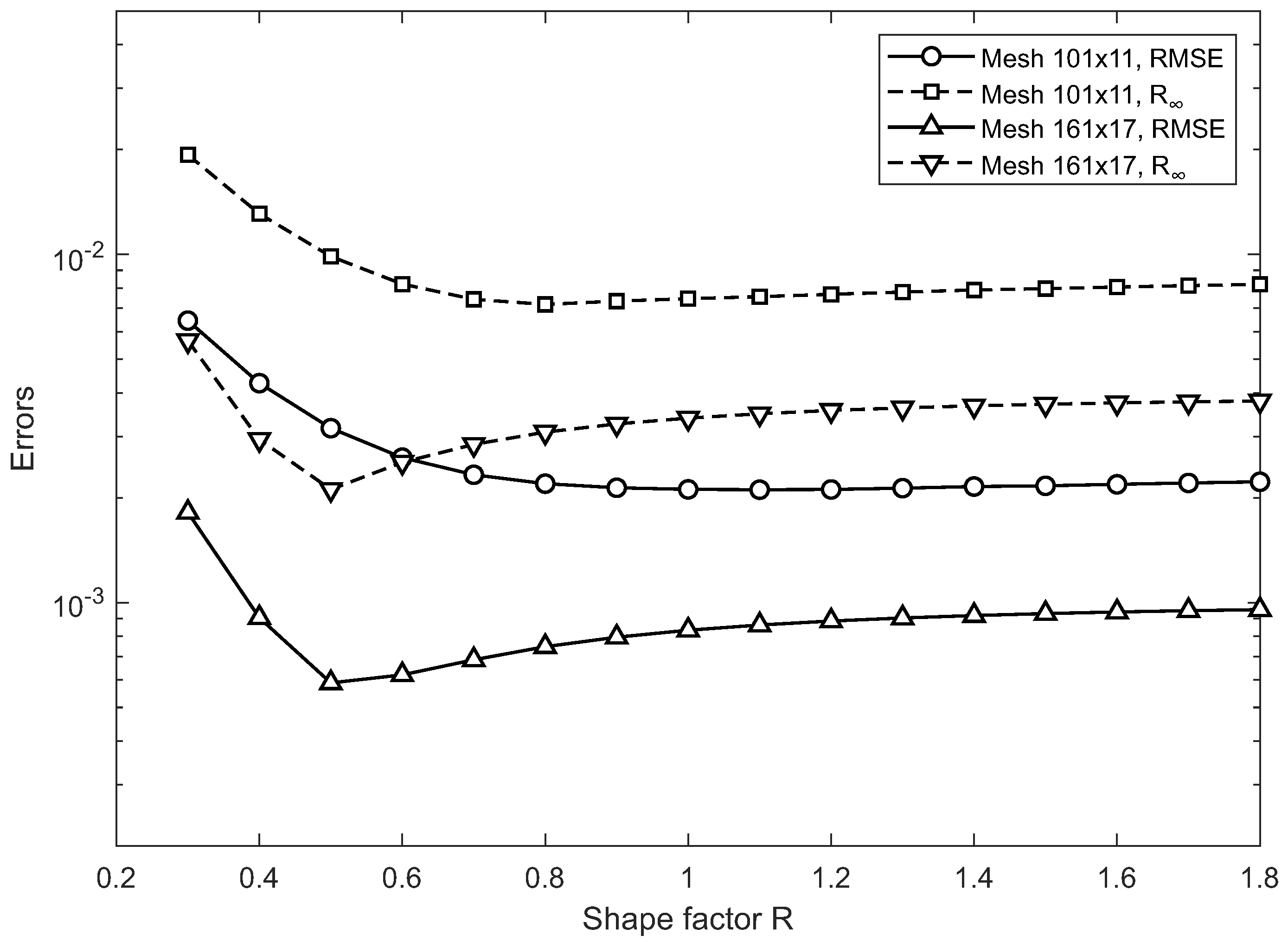
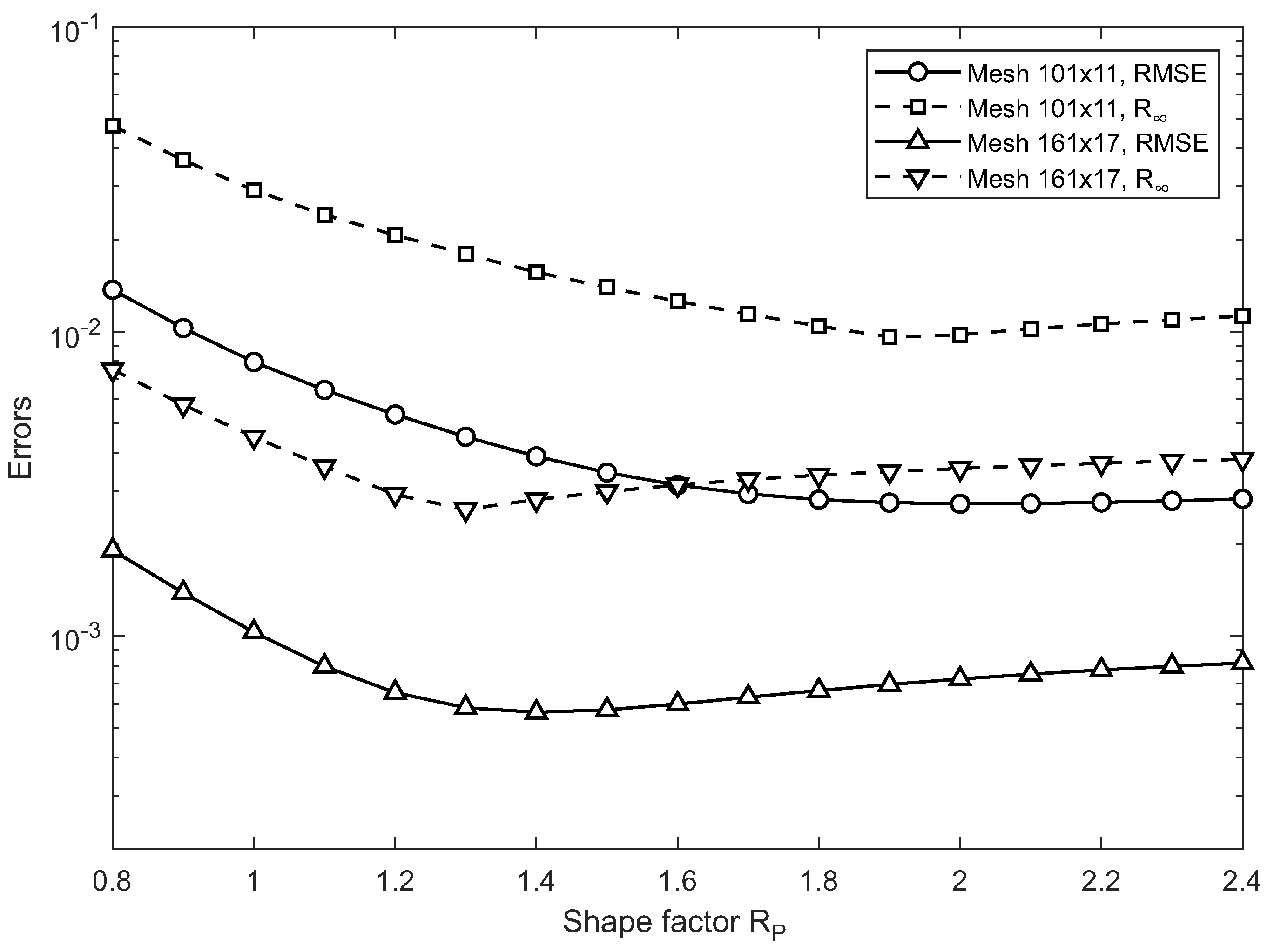
Figure 13.
Example No. 3—RMSE and as functions of the shape factor R.
Figure 13.
Example No. 3—RMSE and as functions of the shape factor R.
Figure 14.
Example No. 3—RMSE and as functions of the shape factor .
Figure 14.
Example No. 3—RMSE and as functions of the shape factor .
Figure 15.
Example No. 3—concentration profiles for Pe = 1000, mesh 161 × 33: (a) , (b) .
Figure 15.
Example No. 3—concentration profiles for Pe = 1000, mesh 161 × 33: (a) , (b) .
Figure 16.
Example No. 3—absolute errors for Pe = 1000, mesh 161 × 33: (a) , (b) .
Figure 16.
Example No. 3—absolute errors for Pe = 1000, mesh 161 × 33: (a) , (b) .
Figure 17.
Example No. 1—connection of the local condition number and number of virtual points.
Figure 17.
Example No. 1—connection of the local condition number and number of virtual points.
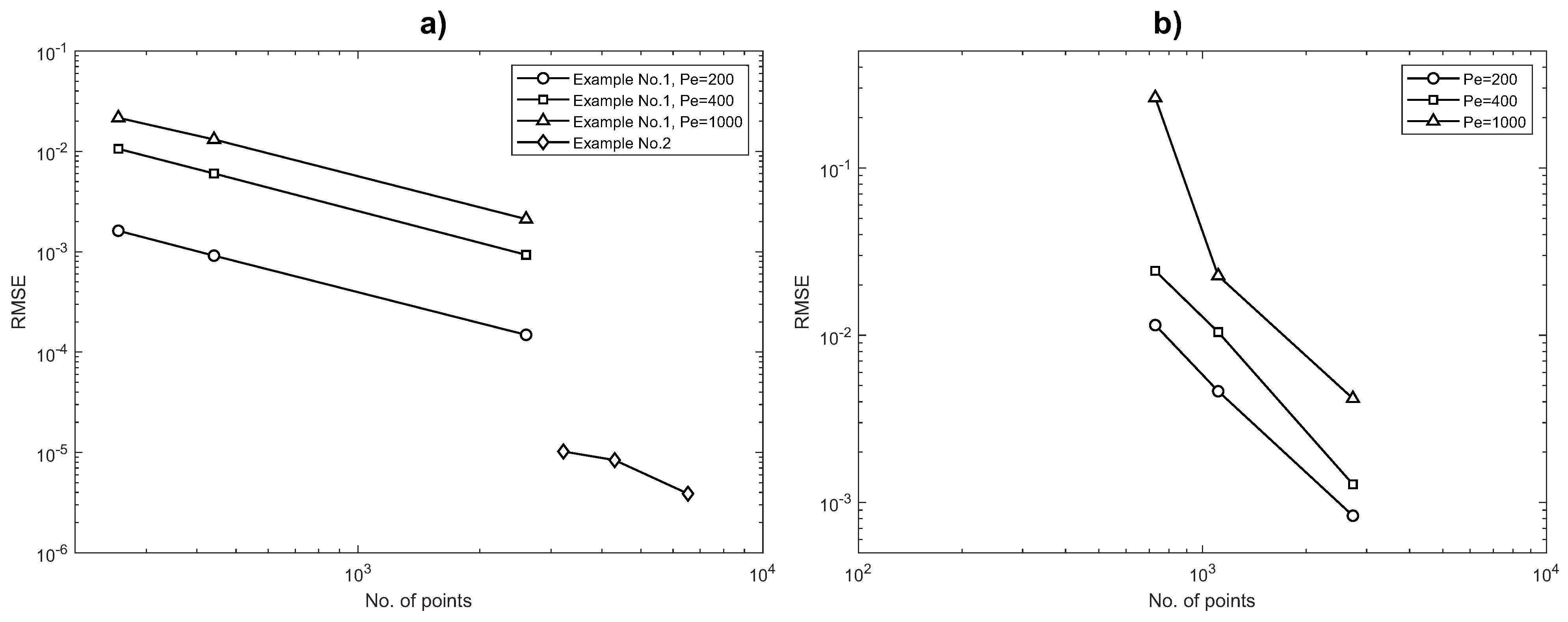
Figure 18.
Connection of the RMSE and number of points: (a) steady solution, (b) unsteady solution.
Figure 18.
Connection of the RMSE and number of points: (a) steady solution, (b) unsteady solution.
Table 1.
Example No. 1—comparison of RMSE and for different meshes and Pe values.
Table 1.
Example No. 1—comparison of RMSE and for different meshes and Pe values.
| Pe | Mesh | Mesh | Irregular Mesh |
|---|
| RMSE | | RMSE | | RMSE | |
|---|
| 10 | 9.1395 | 2.7817 | 1.4861 | 4.4874 | 9.5202 | 4.0198 |
| 30 | 6.0220 | 3.5671 | 9.3171 | 4.6437 | 7.3789 | 5.1634 |
| 50 | 1.3147 | 9.4959 | 2.1142 | 1.3600 | 1.8039 | 2.0027 |
Table 2.
Example No. 1—comparison of RMSE and for different number of virtual points.
Table 2.
Example No. 1—comparison of RMSE and for different number of virtual points.
| n | Regular Mesh 51 × 51 | Irregular Mesh |
|---|
| RMSE | | RMSE | |
|---|
| 6 | 1.4862 | 4.4850 | 9.6585 | 4.0193 |
| 8 | 1.4861 | 4.4789 | 9.6592 | 4.0197 |
| 12 | 1.4783 | 4.4629 | 9.6779 | 4.0168 |
| 16 | 1.4884 | 4.4984 | 9.6639 | 4.0198 |
Table 3.
Example No. 1—comparison of RMSE and for different numbers of supporting points.
Table 3.
Example No. 1—comparison of RMSE and for different numbers of supporting points.
| m | Regular Mesh 51 × 51 | m | Irregular Mesh |
|---|
| RMSE | | RMSE | |
|---|
| 9 | 1.4860 | 4.4792 | 5 | 1.5962 | 5.4667 |
| 25 | 8.1076 | 2.5550 | 7 | 9.5201 | 4.0198 |
| 49 | 1.0941 | 3.7766 | 13 | 2.0092 | 5.3685 |
| 81 | 3.4093 | 1.5674 | 19 | 1.6715 | 2.0910 |
Table 4.
Example No. 1—comparison of RMSE and for different radius of the virtual area.
Table 4.
Example No. 1—comparison of RMSE and for different radius of the virtual area.
| Regular Mesh 51 × 51 | Irregular Mesh |
|---|
| RMSE | | RMSE | |
|---|
| 0.6 | 4.3285 | 1.3045 | 1.6194 | 4.9429 |
| 0.8 | 3.0831 | 9.2960 | 1.3312 | 4.4993 |
| 1.0 | 1.4861 | 4.4789 | 9.6592 | 4.0197 |
| 1.2 | 4.6538 | 1.4011 | 5.6234 | 3.4336 |
| 1.4 | 2.7695 | 8.3469 | 4.0517 | 2.7423 |
| 1.6 | 5.4251 | 1.6342 | 8.7447 | 3.1388 |
Table 5.
Example No. 2—comparison of RMSE and for a different number of virtual points.
Table 5.
Example No. 2—comparison of RMSE and for a different number of virtual points.
| n | 3216 Points | 6530 Points |
|---|
| RMSE | | RMSE | |
|---|
| 6 | 1.0489 | 1.8703 | 3.3324 | 6.8178 |
| 8 | 8.0688 | 3.6588 | 3.6236 | 7.3594 |
| 10 | 8.5035 | 8.2199 | 3.4279 | 7.0187 |
| 16 | 8.2809 | 7.0545 | 3.5056 | 7.1266 |
Table 6.
Example No. 2—comparison of RMSE and for different numbers of supporting points.
Table 6.
Example No. 2—comparison of RMSE and for different numbers of supporting points.
| m | 3216 Points | 6530 Points |
|---|
| RMSE | | RMSE | |
|---|
| 7 | 3.57 | 2.56 | 1.87 | 3.79 |
| 9 | 6.13 | 2.68 | 2.55 | 1.54 |
| 13 | 8.07 | 3.66 | 3.62 | 7.36 |
| 19 | 1.01 | 3.47 | 3.85 | 7.96 |
| 25 | 3.25 | 2.29 | 8.01 | 6.65 |
| 31 | 7.63 | 1.61 | 3.23 | 6.09 |
Table 7.
Example No. 2—comparison of RMSE and for different radii of virtual area.
Table 7.
Example No. 2—comparison of RMSE and for different radii of virtual area.
| 3216 Points | 6530 Points |
|---|
| RMSE | | RMSE | |
|---|
| 0.6 | 1.8708 | 3.7636 | 5.4936 | 1.1633 |
| 0.8 | 1.5363 | 5.6583 | 4.9468 | 1.0110 |
| 1.0 | 1.0094 | 3.4681 | 3.8808 | 8.0037 |
| 1.2 | 4.1740 | 3.5152 | 2.6612 | 5.7076 |
| 1.4 | 2.7209 | 5.8848 | 1.2998 | 4.9287 |
| 1.6 | 5.8256 | 8.4728 | 2.0681 | 2.1252 |
Table 8.
Example No. 3—RMSE and for different Peclet numbers.
Table 8.
Example No. 3—RMSE and for different Peclet numbers.
| Pe | Mesh | Mesh |
|---|
| RMSE | | RMSE | |
|---|
| 200 | 4.6244 | 1.4834 | 8.3319 | 3.3870 |
| 400 | 1.0440 | 3.9621 | 1.2844 | 5.6586 |
| 1000 | 2.2662 | 1.0775 | 4.1826 | 2.1395 |
Table 9.
Example No. 3—comparison of RMSE for Pe = 1000, , , and different meshes.
Table 9.
Example No. 3—comparison of RMSE for Pe = 1000, , , and different meshes.
| Time | | |
|---|
| Mesh | Mesh | Mesh | Mesh |
|---|
| 2 | 8.0725 | 4.0627 | 5.9374 | 2.7769 |
| 4 | 8.0044 | 2.3824 | 4.5891 | 1.2482 |
| 6 | 8.8779 | 1.8665 | 4.0667 | 9.8041 |
| 8 | 9.2876 | 1.7438 | 3.6041 | 9.4922 |
| 10 | 9.2755 | 1.7132 | 3.2915 | 9.4261 |
Table 10.
Example No. 1—values of condition numbers, eight virtual boundary points.
Table 10.
Example No. 1—values of condition numbers, eight virtual boundary points.
| Pe | Local | Global | RBF |
|---|
| 10 | 4.9691 | 5.0797 | 7.5114 |
| 30 | 2.6072 | 3.0437 | 7.5114 |
| 50 | 4.6362 | 2.4988 | 7.5114 |
Table 11.
Example No. 3—values of condition numbers, eight virtual boundary and six internal points.
Table 11.
Example No. 3—values of condition numbers, eight virtual boundary and six internal points.
| Mesh | Local | Global | RBF |
|---|
| 101 × 11 | 6.9144 | 1.4806 | 1.8830 |
| 167 × 16 | 7.9764 | 3.8825 | 2.8587 |
Table 12.
Example Nos. 1 and 2—values of RMSE and the convergence rates (CR).
Table 12.
Example Nos. 1 and 2—values of RMSE and the convergence rates (CR).
| No. of Points | RMSE, Example No. 1 | No. of Points | RMSE, Example No. 2 |
|---|
| | Pe = 10 | Pe = 30 | Pe = 50 | | |
|---|
| 256 | 1.619 | 1.060 | 2.162 | 3216 | 1.023 |
| 441 | 9.140 | 6.022 | 1.315 | 4305 | 8.390 |
| 2601 | 1.486 | 9.317 | 2.114 | 6530 | 3.881 |
| CR | 1.024 | 1.052 | 1.030 | CR | 1.368 |
Table 13.
Example No. 3—values of RMSE and the convergence rates (CR).
Table 13.
Example No. 3—values of RMSE and the convergence rates (CR).
| No. of Points | Pe = 20 | Pe = 400 | Pe = 1000 |
|---|
| 729 | 1.150 | 2.425 | 2.630 |
| 1111 | 4.624 | 1.044 | 2.266 |
| 2737 | 8.332 | 1.284 | 4.183 |
| CR | 1.984 | 2.221 | 3.130 |























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}