
Adaptive Fuzzy Tracking Control of Uncertain Nonlinear Multi-Agent Systems with Unknown Control Directions and a Dead-Zone Fault

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (i)
- (ii)
- (iii)
- The Nussbaum gain function technology is used in the design of the intermediate control law and of the adaptive fuzzy control law to solve the desired tracking control problem. Compared with [10,24,26,27], the control law designed in this paper can meet the control requirements when the control directions are unknown and coexists with the actuator dead-zone fault.
- (iv)
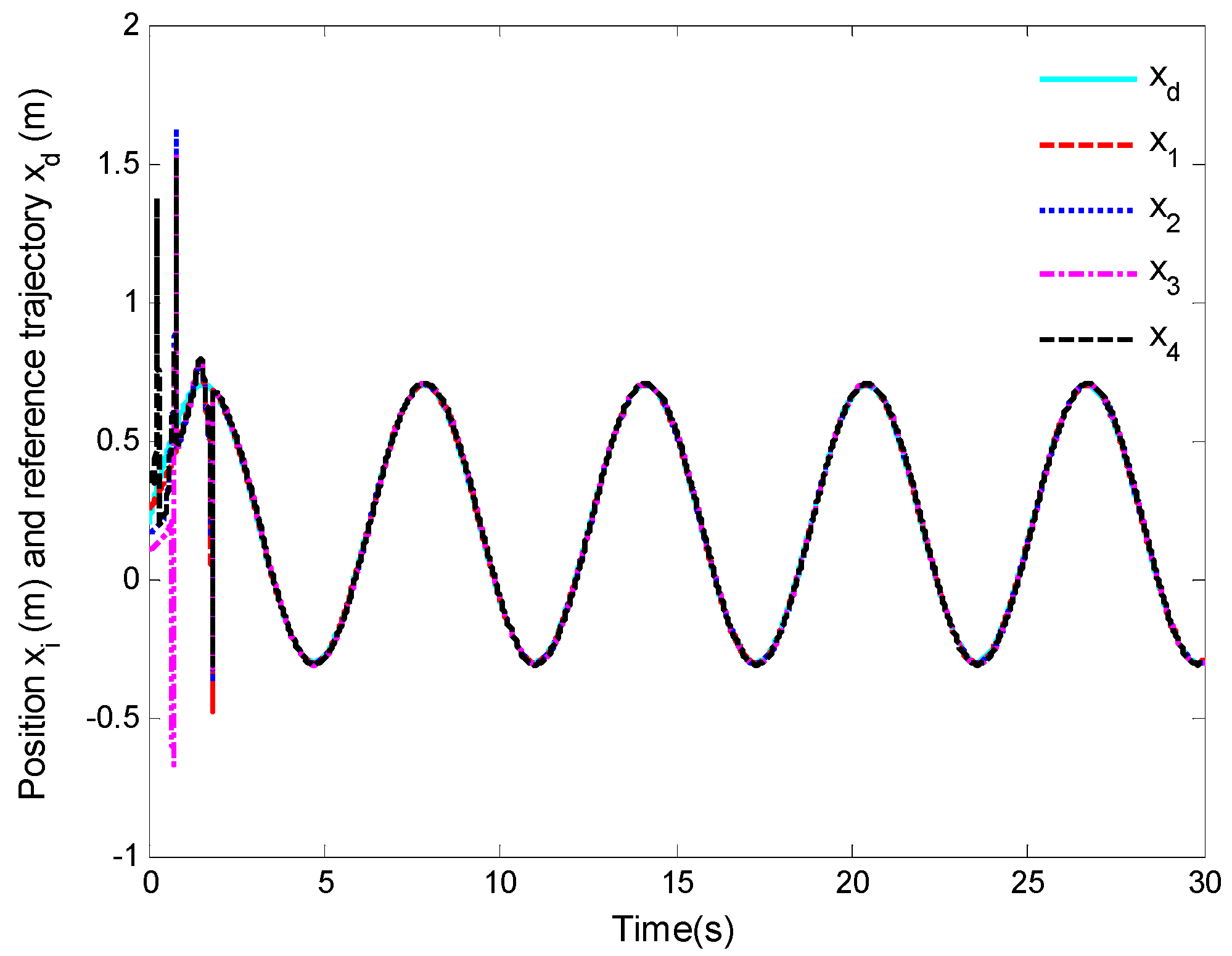
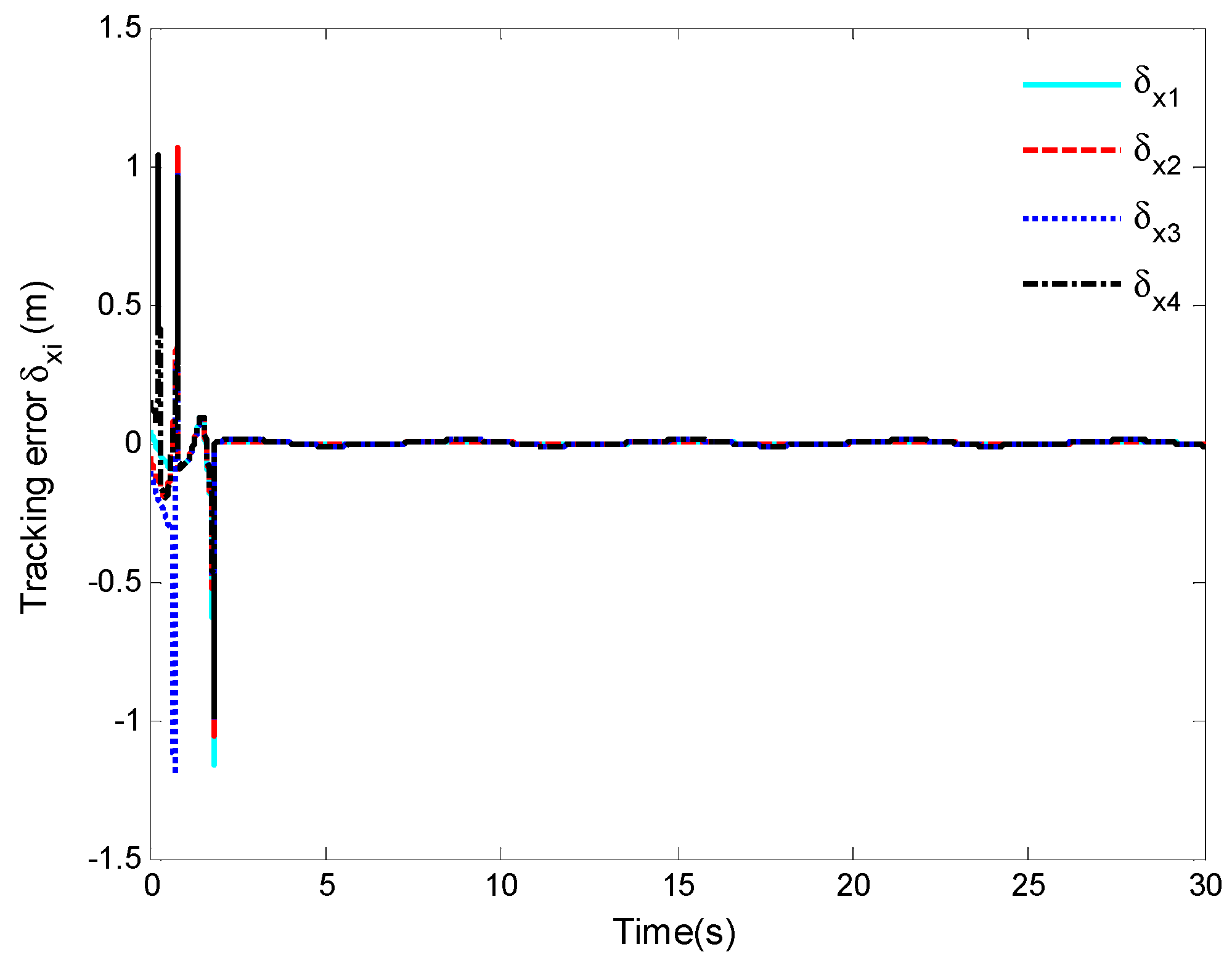
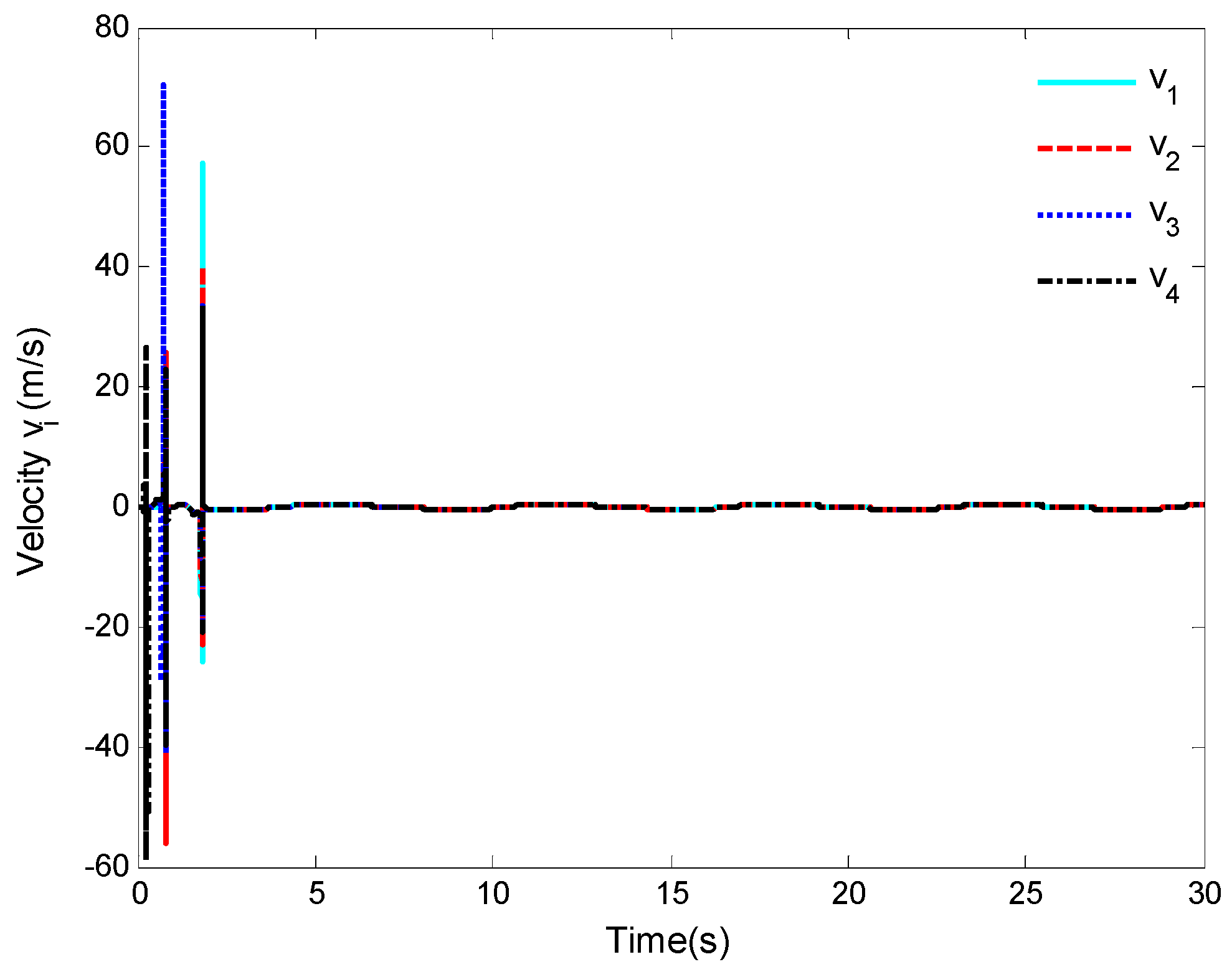
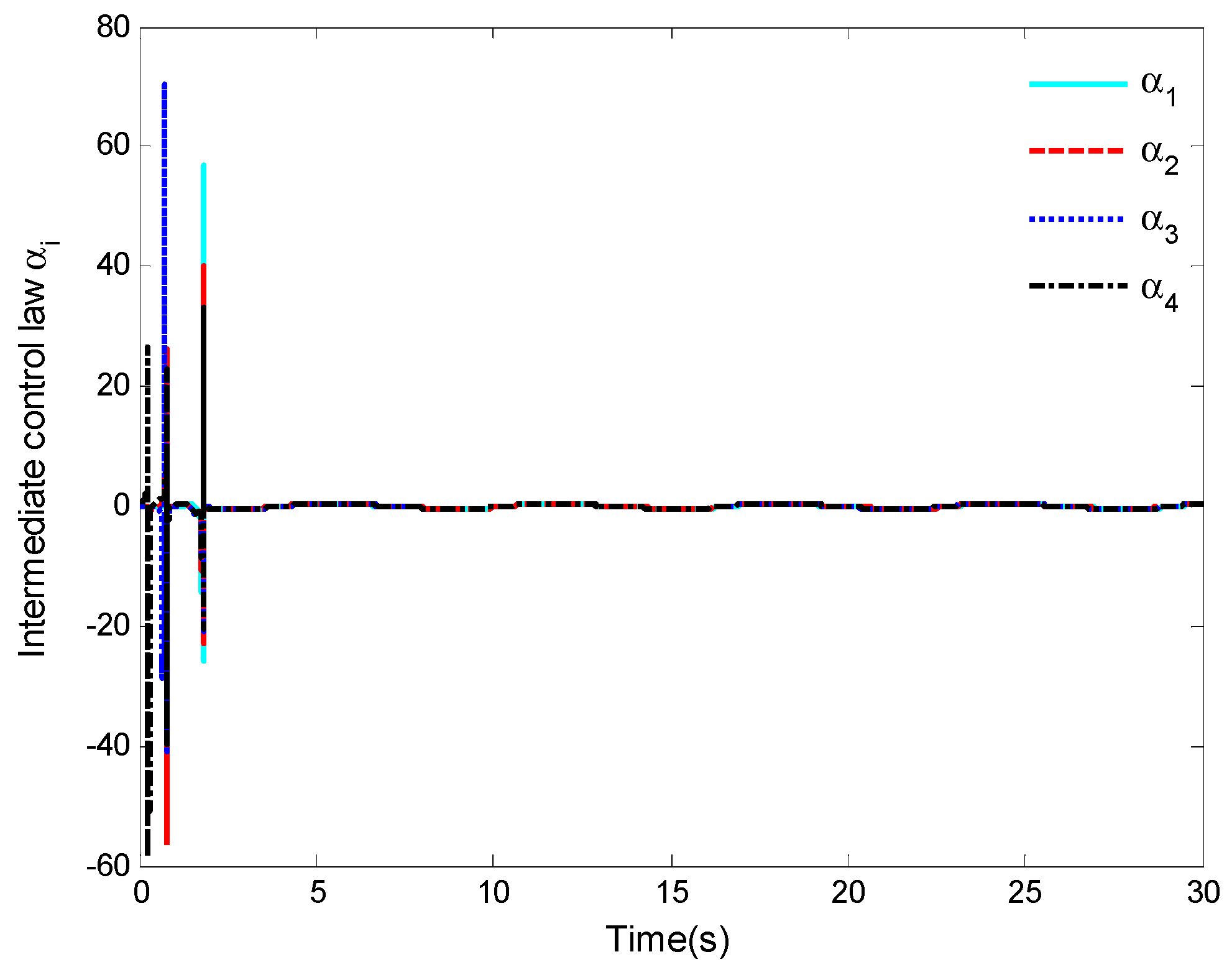
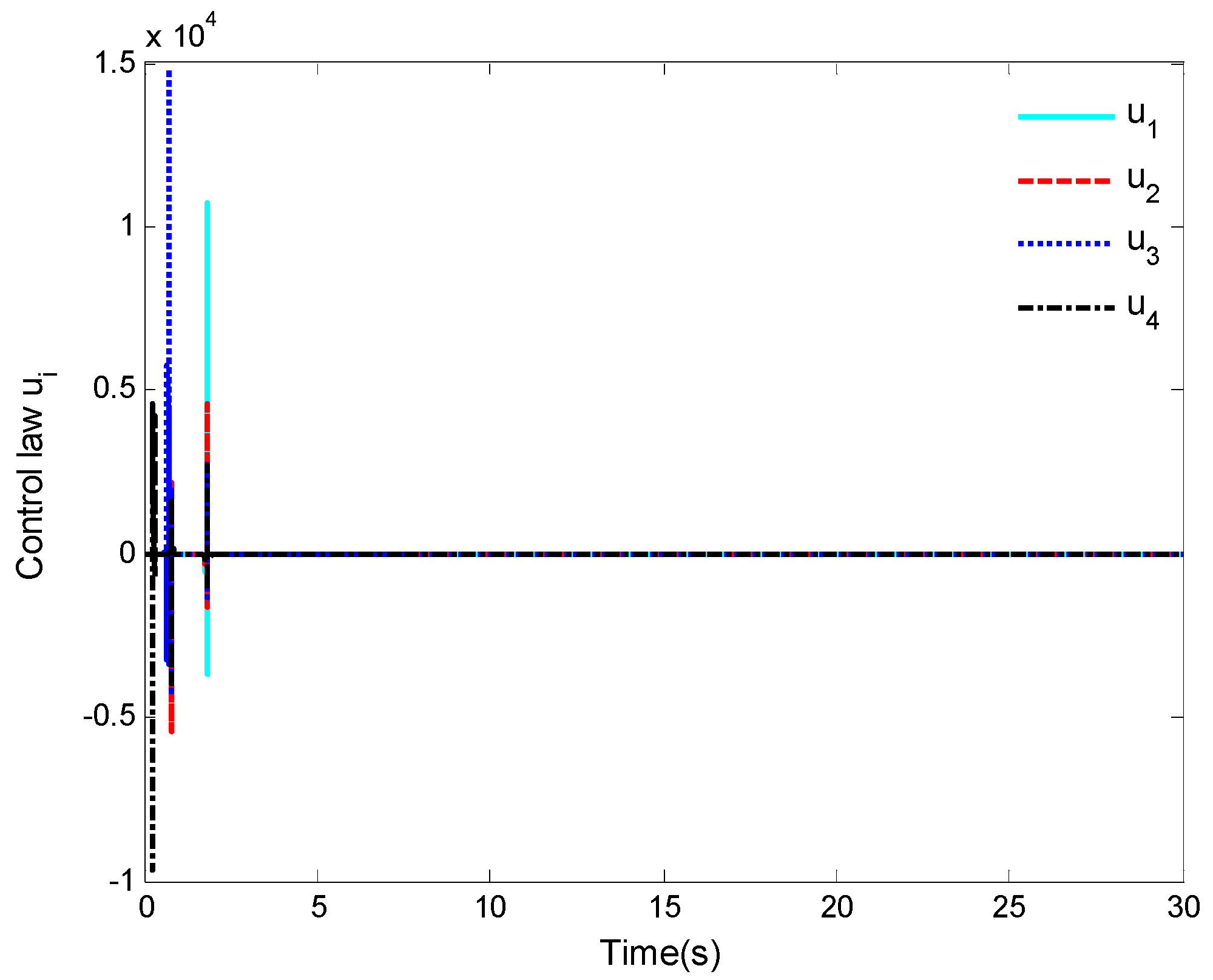
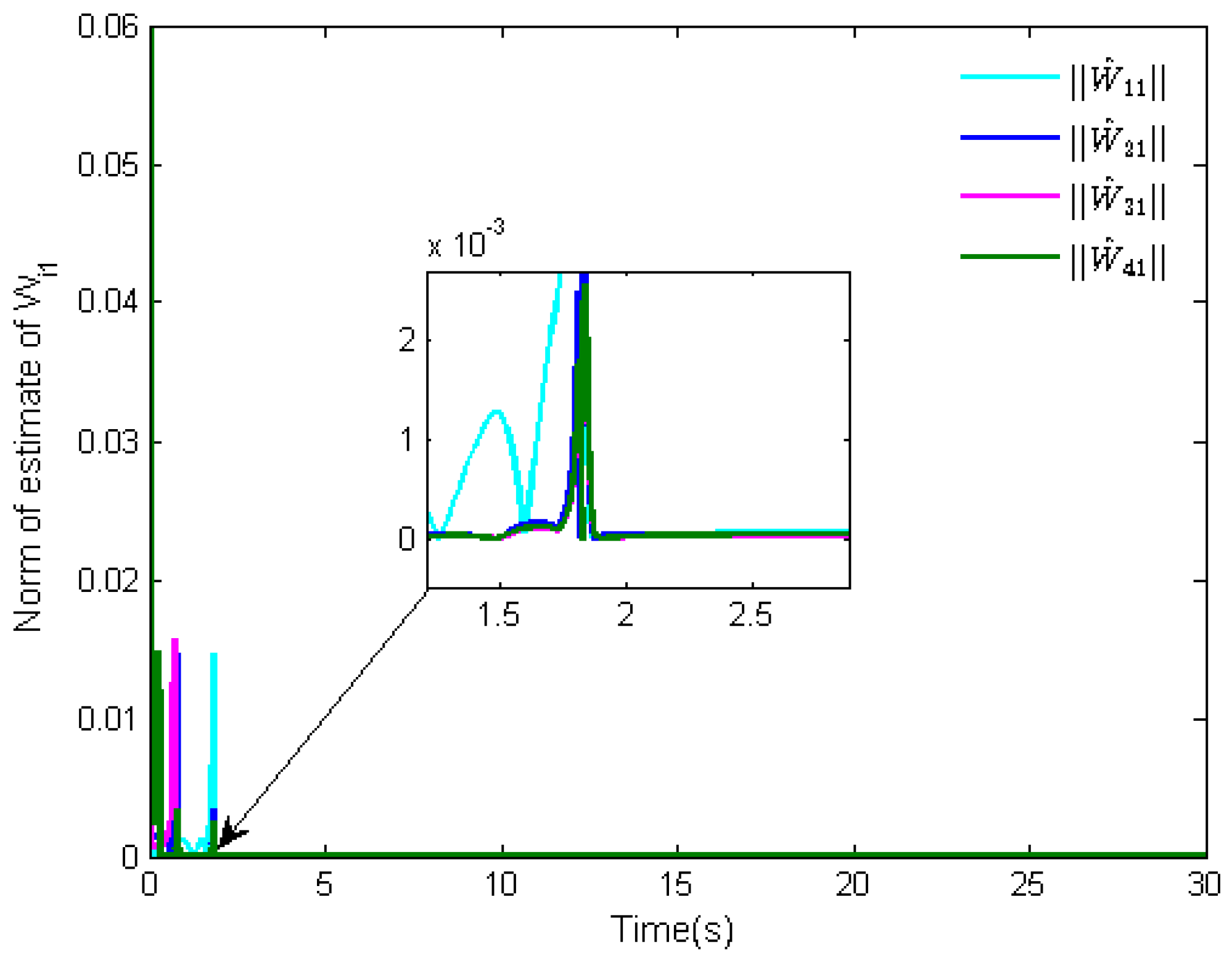
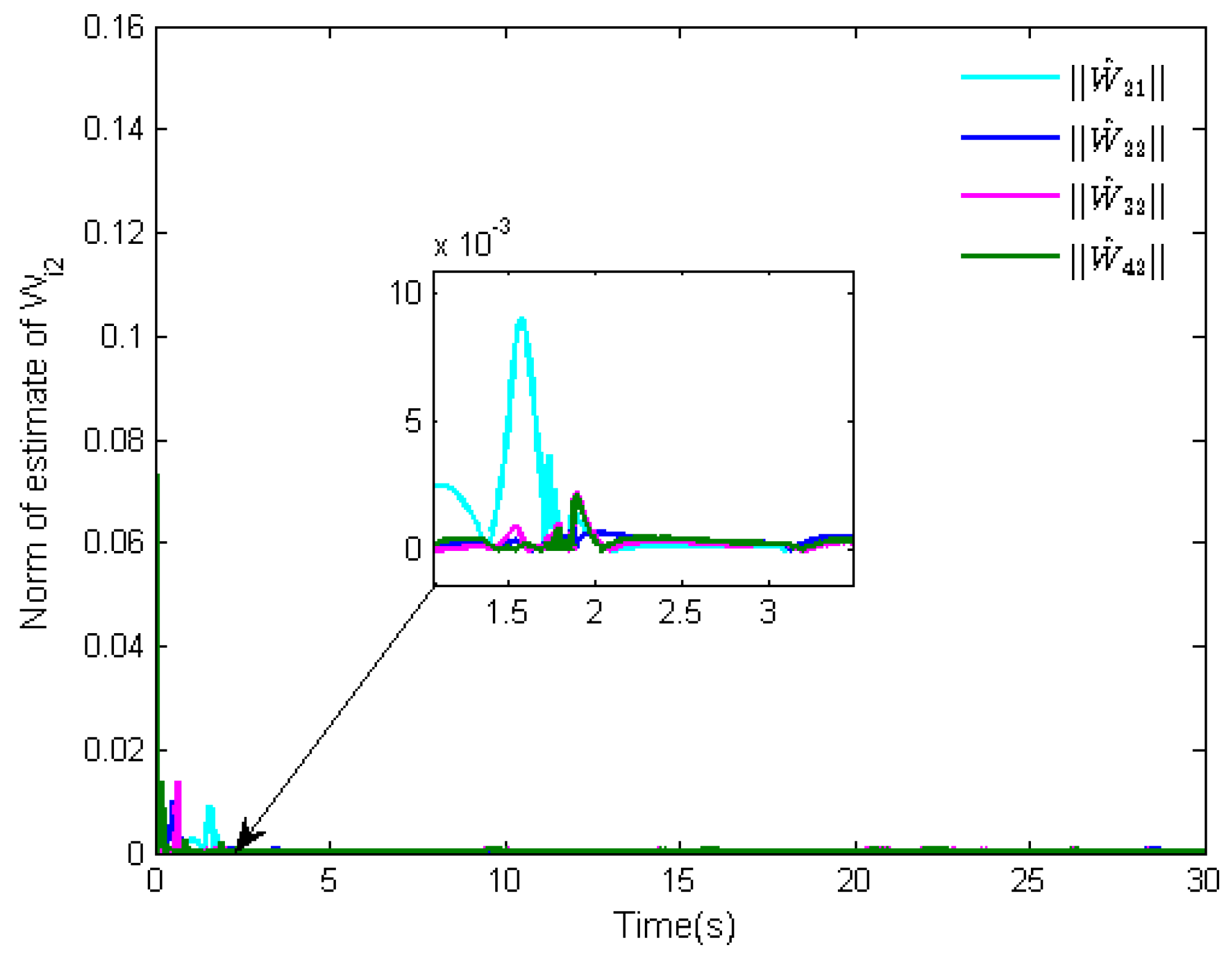
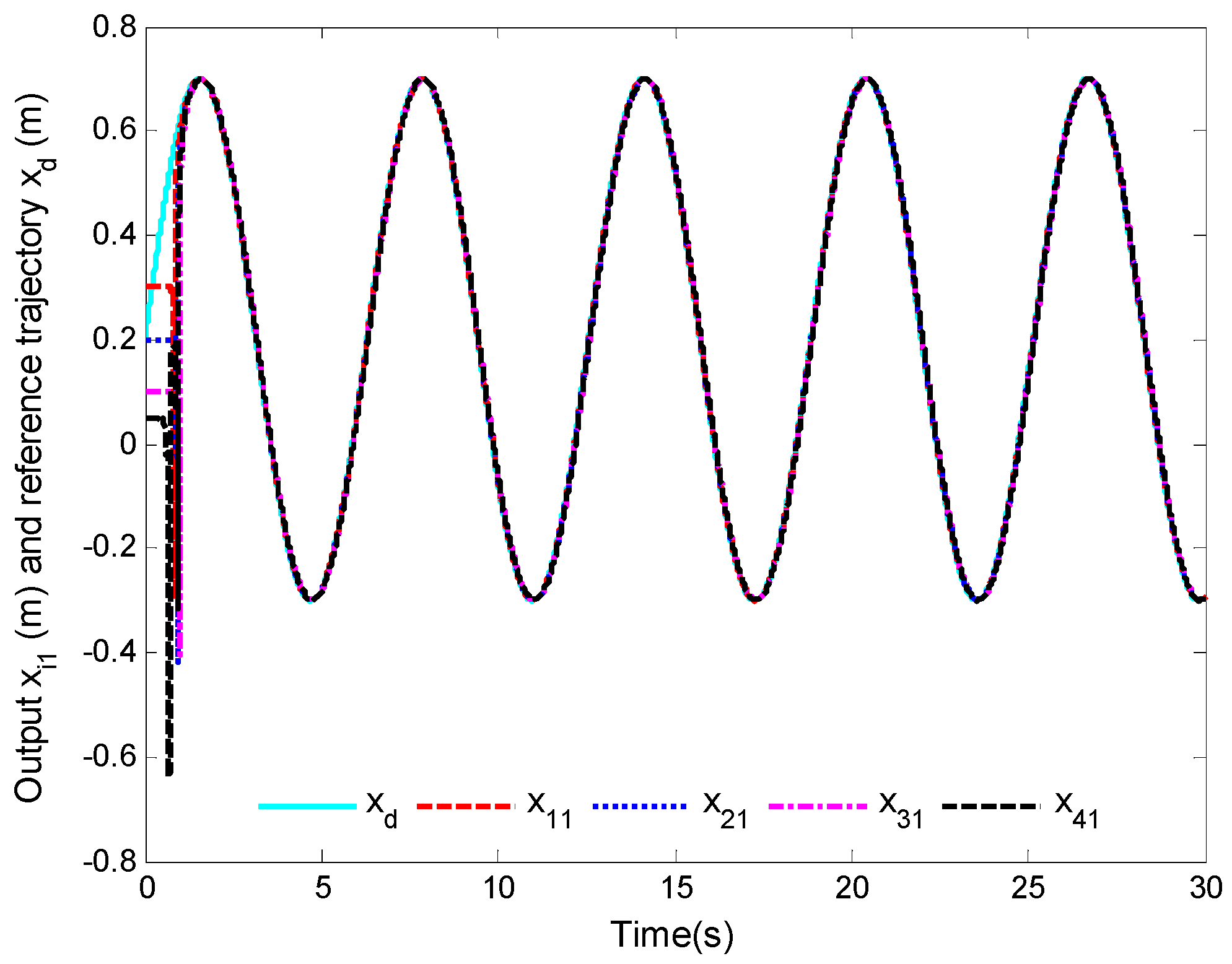
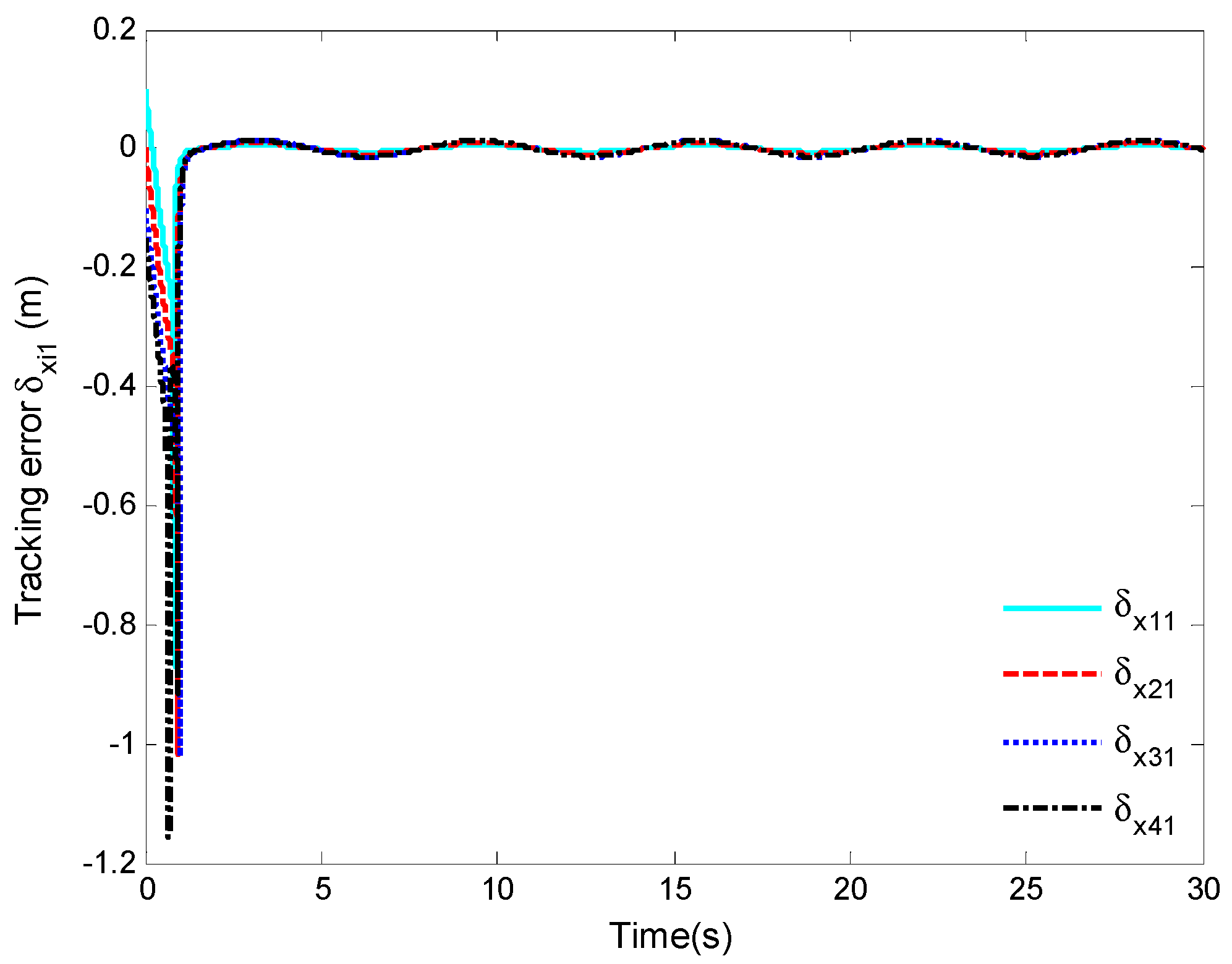
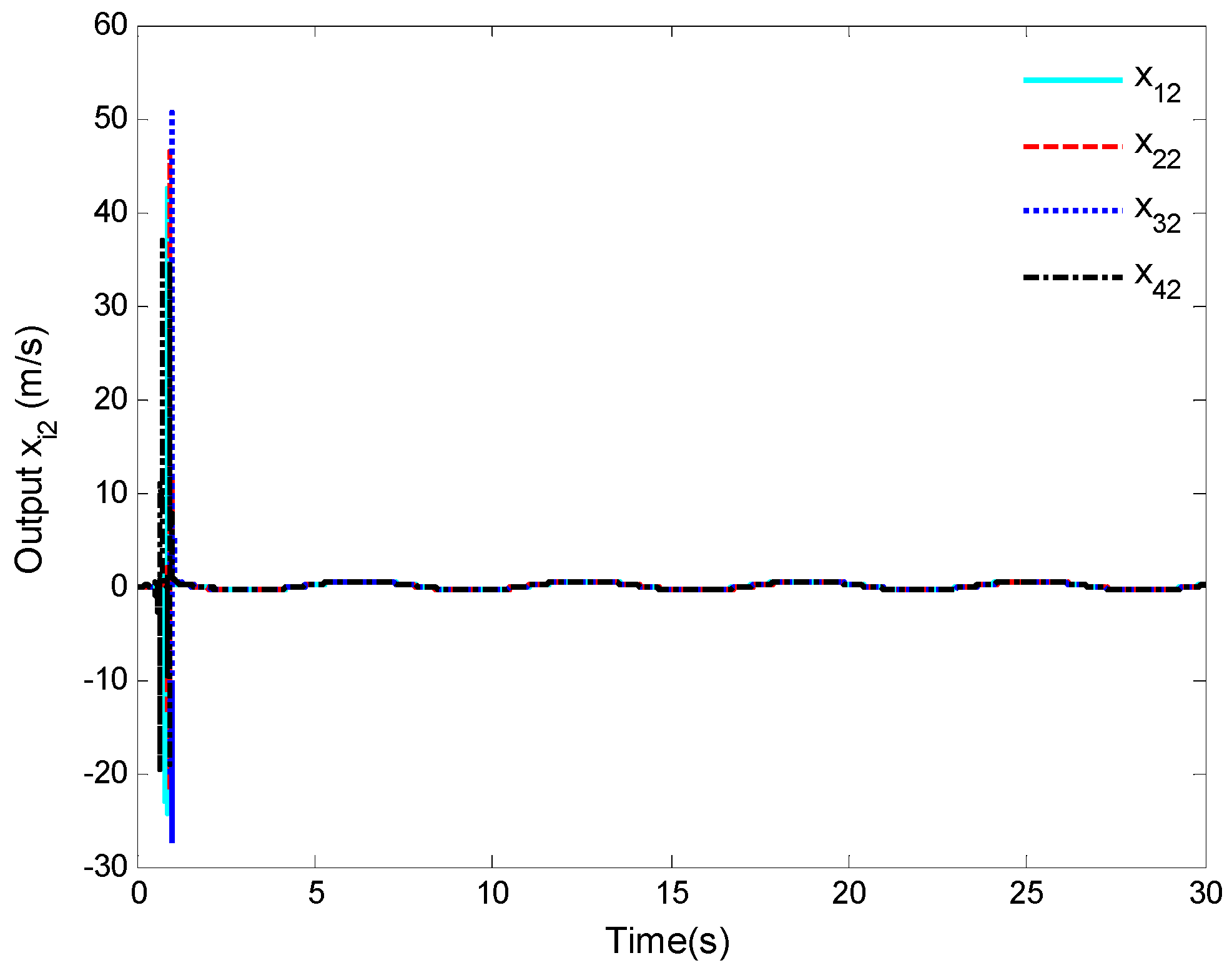
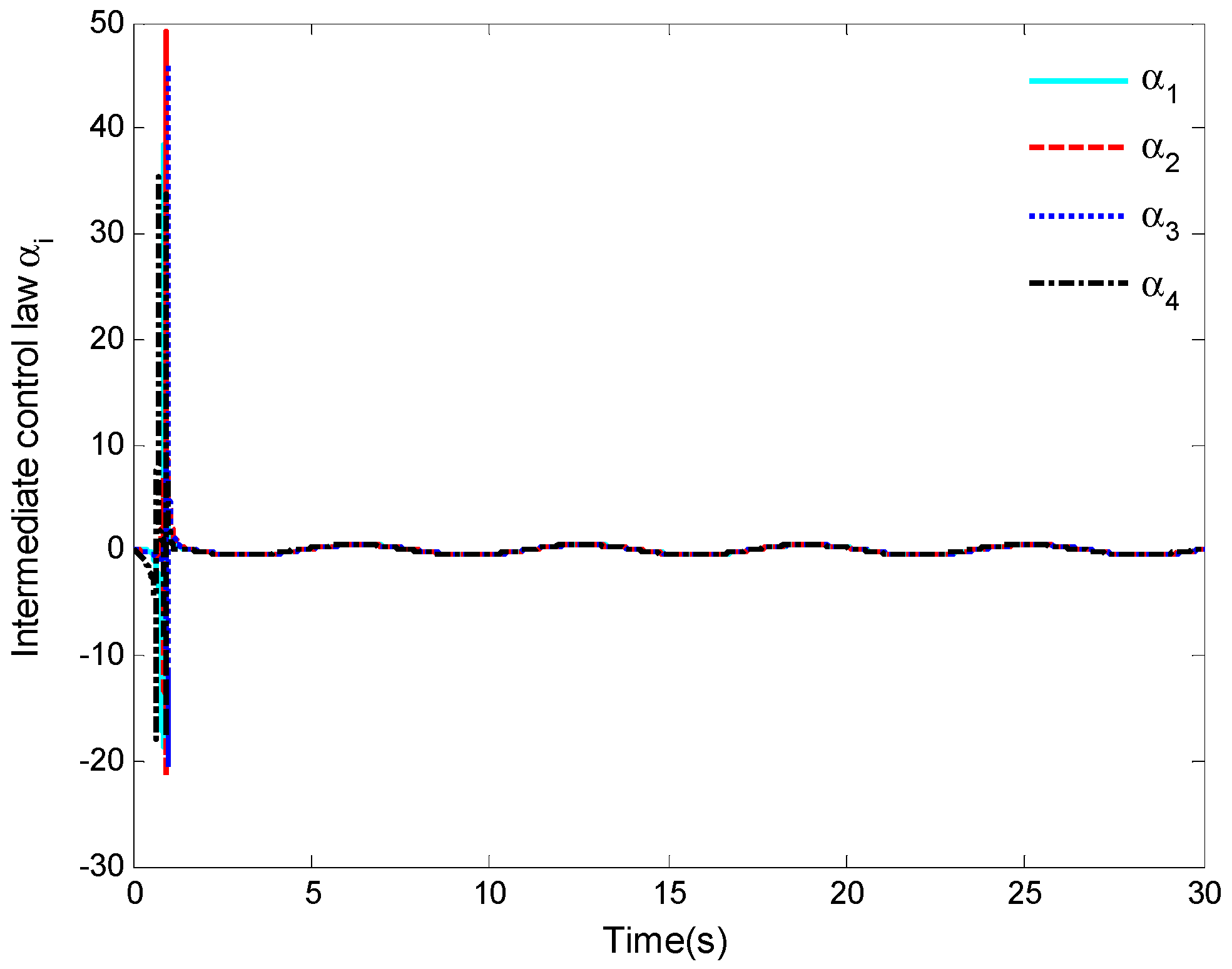
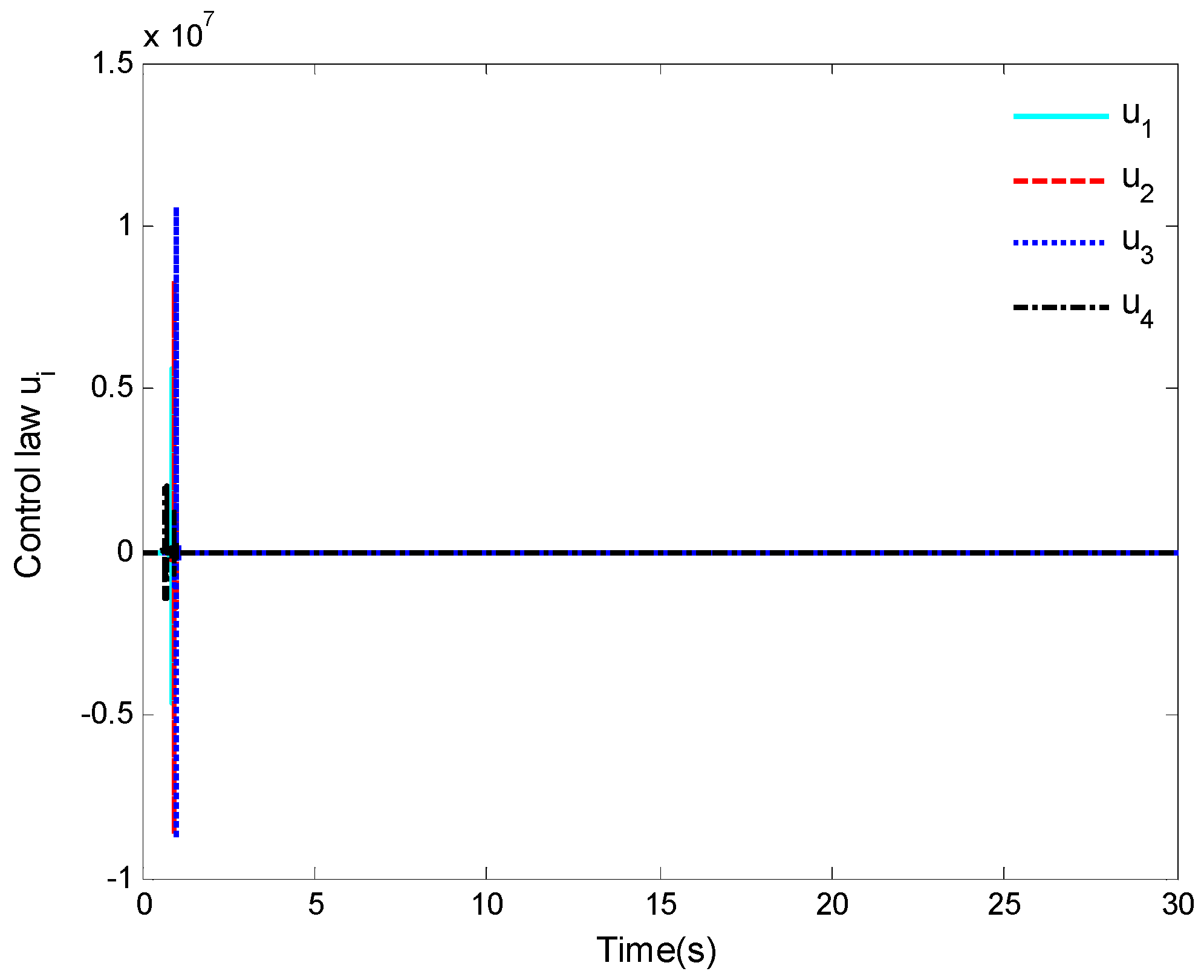
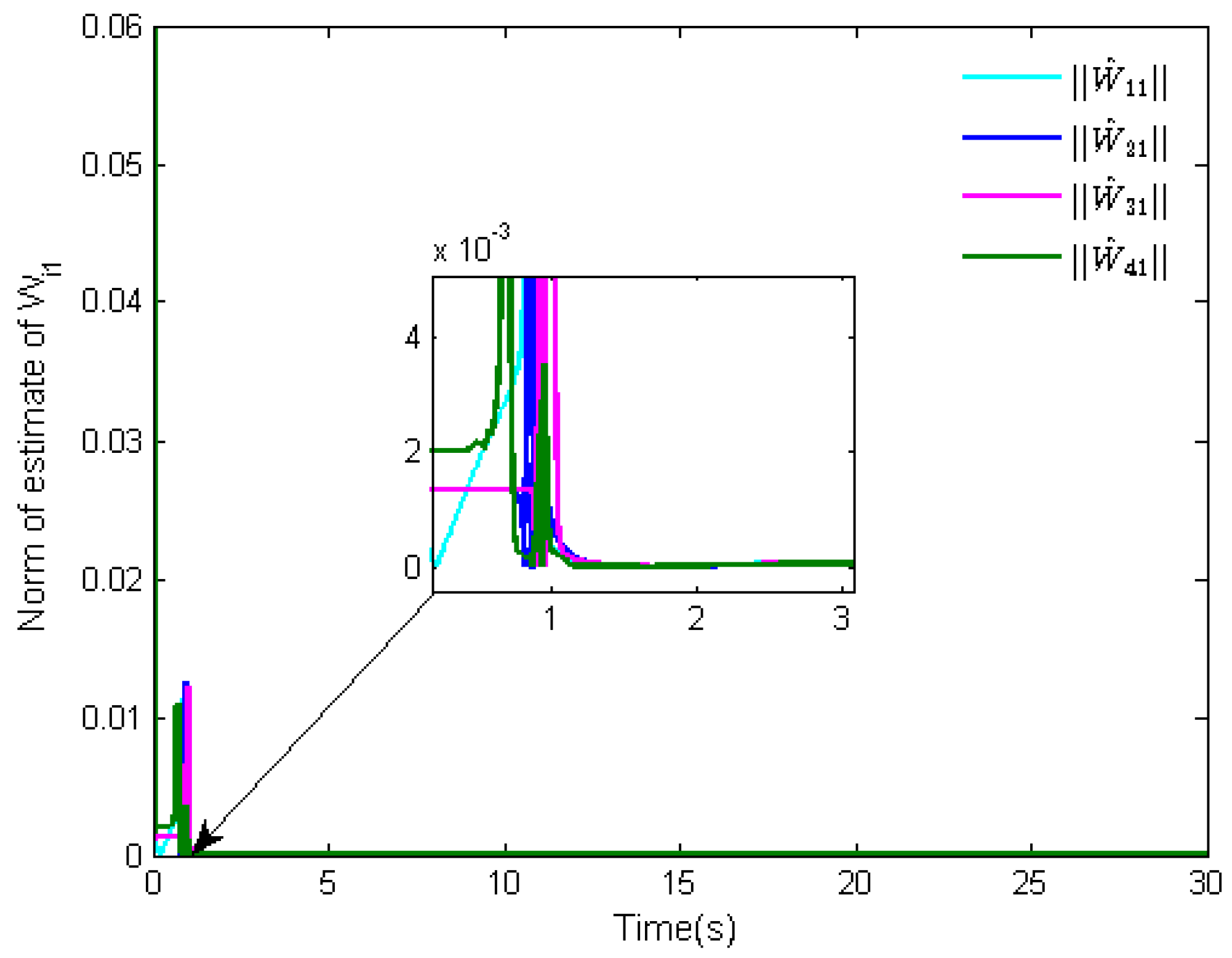
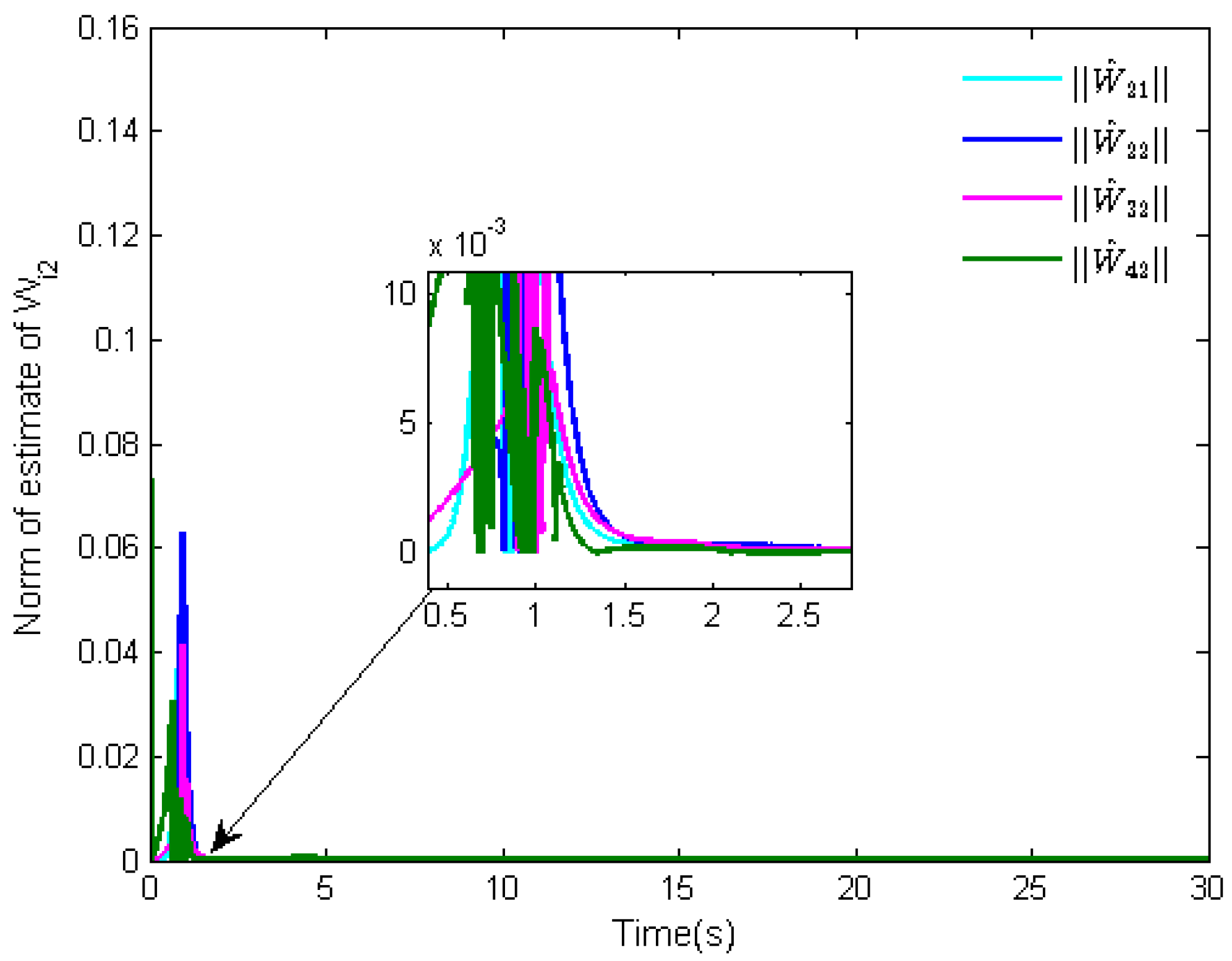
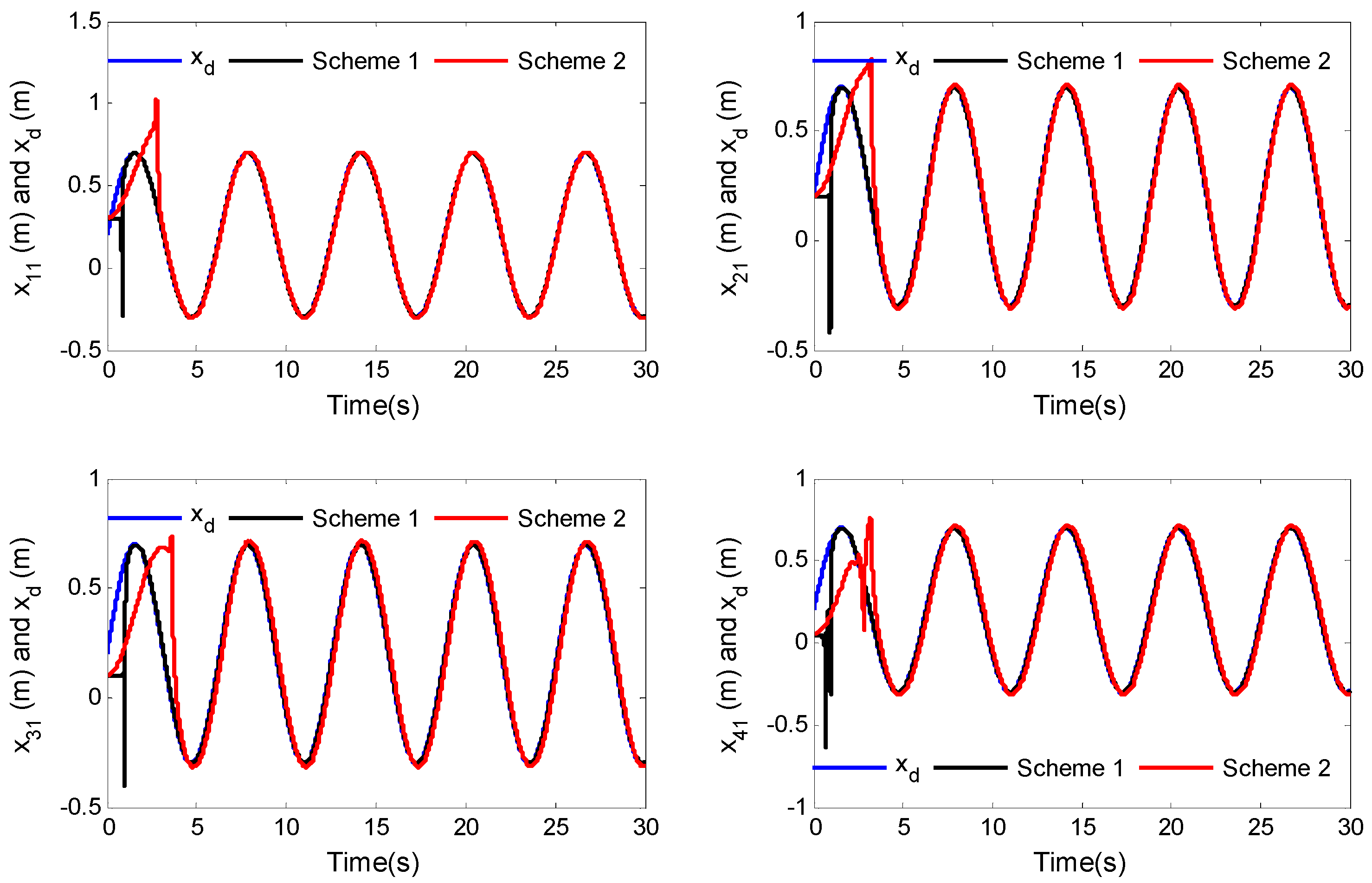
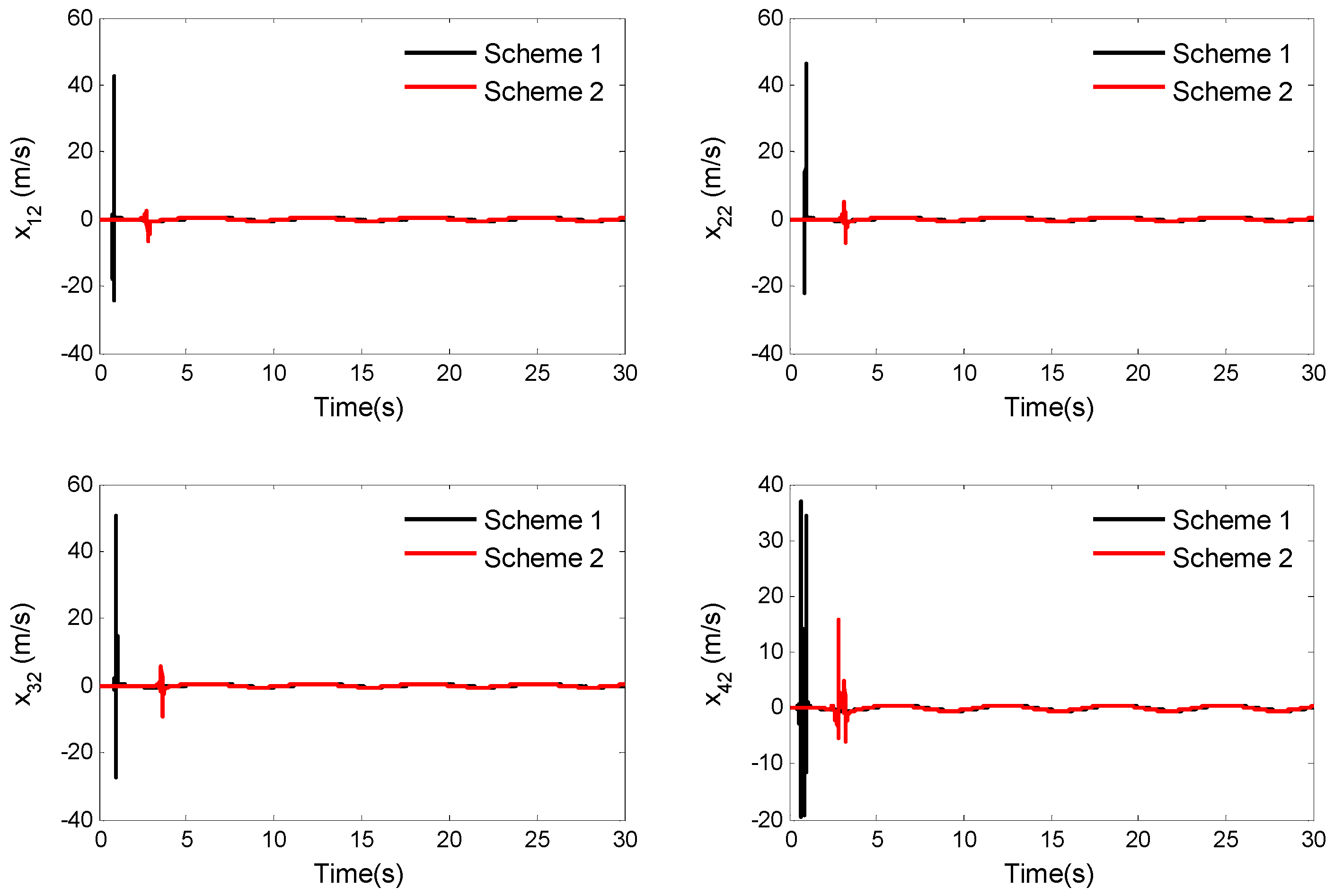
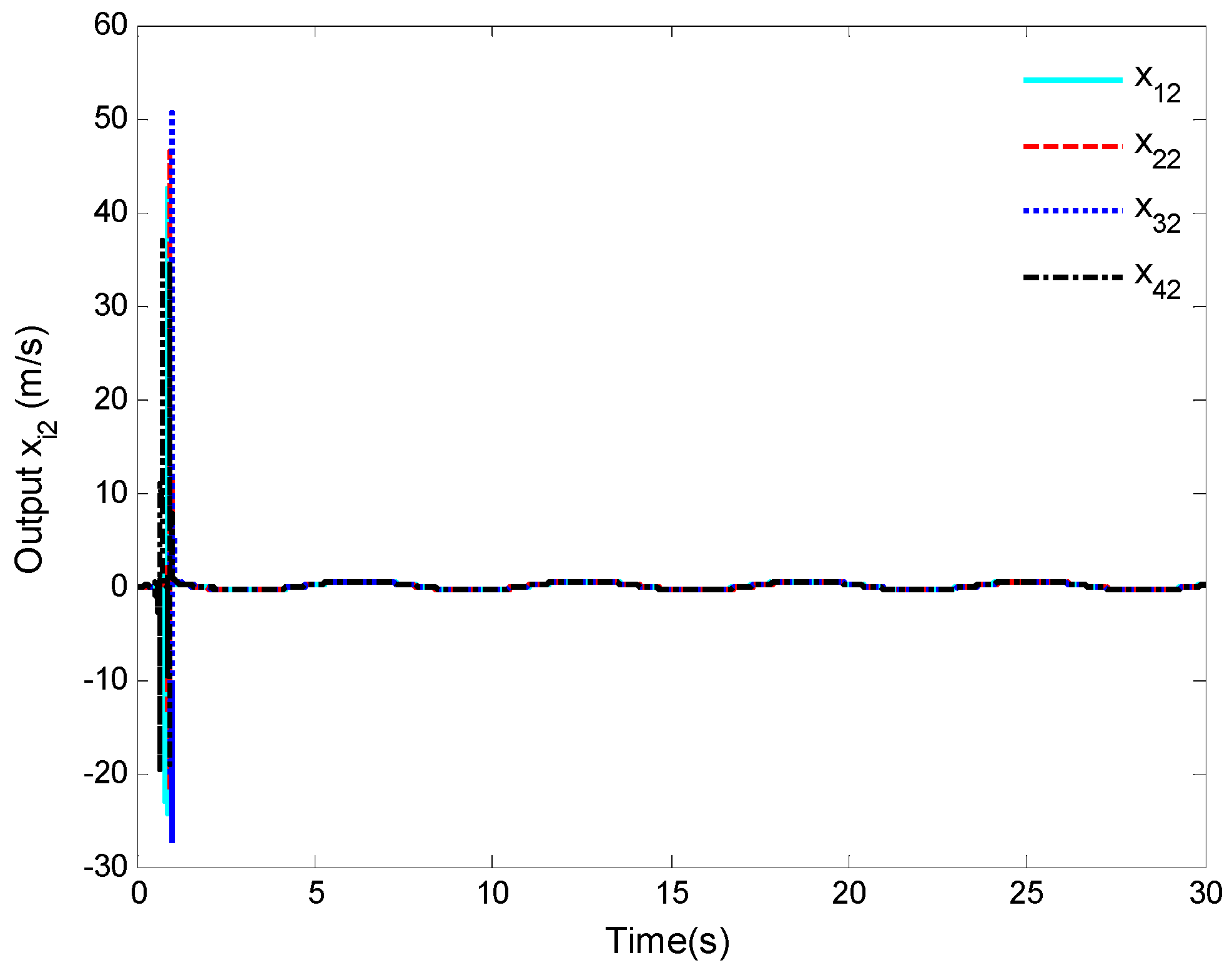
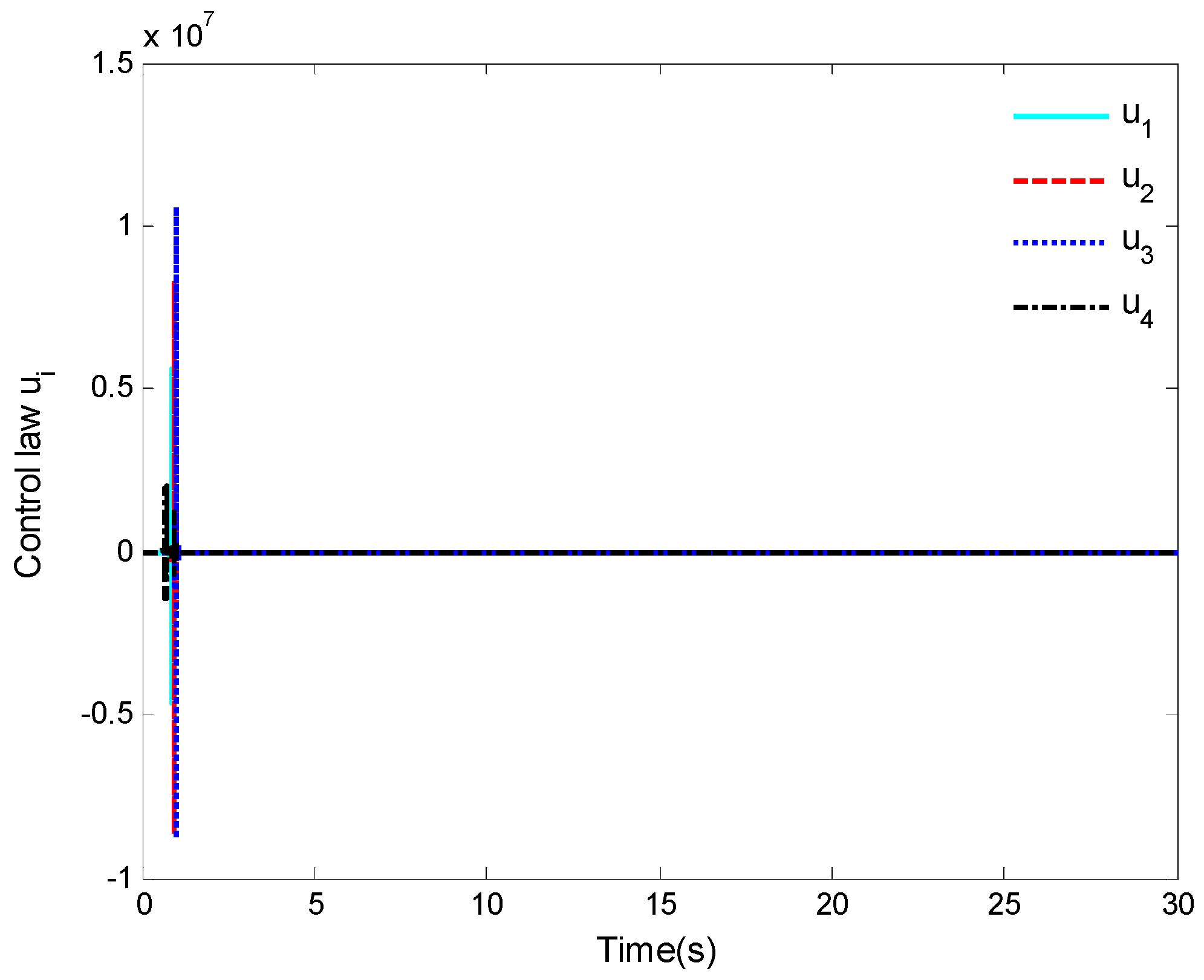
- Based on the designed Lyapunov function, the effectiveness of the proposed control law is proven. The simulation results show that the tracking errors can finally converge to a small neighborhood of zero following adjustments to the relevant parameters.
2. Problem Formulation and Preliminaries
2.1. Problem Formulation
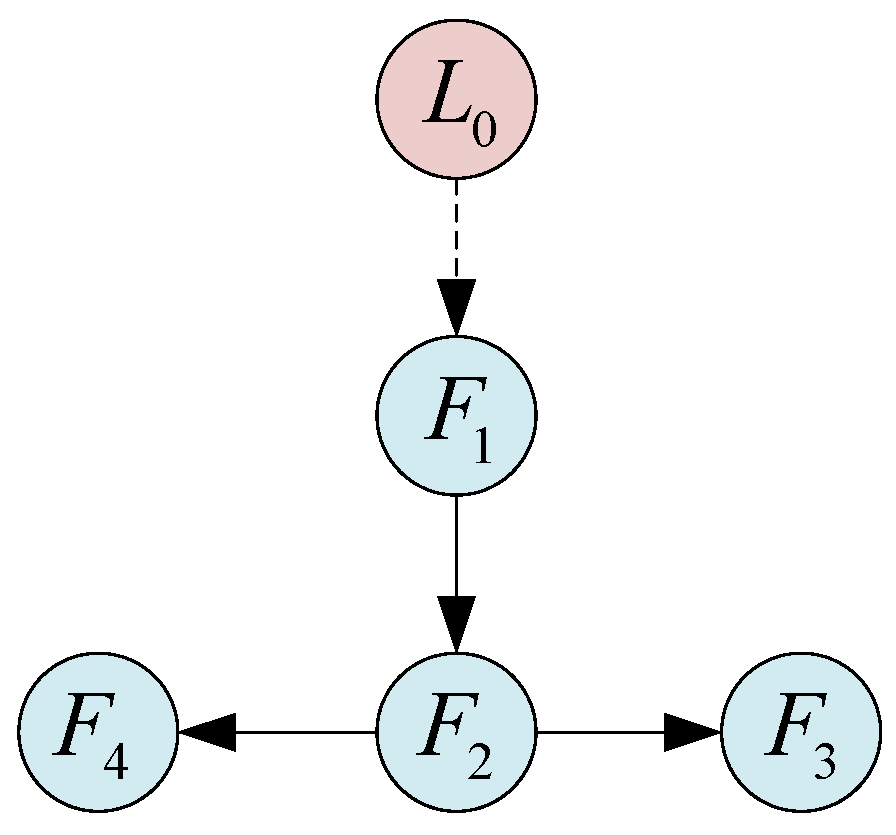
2.2. Graph Theory
2.3. Fuzzy Logic System
2.4. Definition and Lemmas
3. Adaptive Control Law Design and Stability Analysis
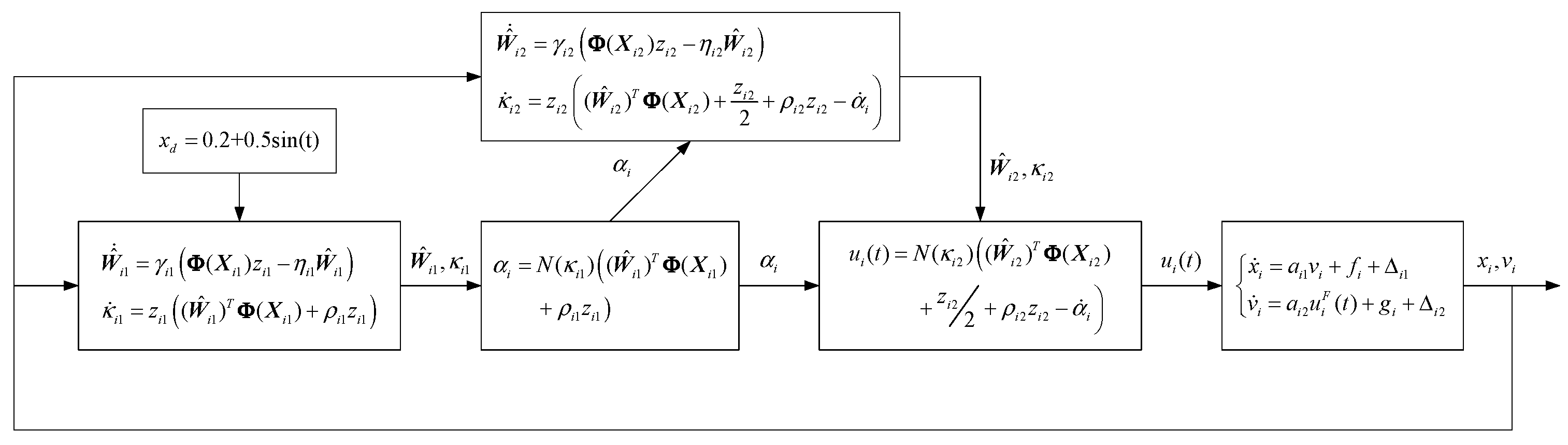
3.1. Adaptive Fuzzy Control Law Design
3.2. Stability Analysis
4. Simulation Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Dou, L.; Cai, S.; Zhang, X.; Su, X.; Zhang, R. Event-triggered-based adaptive dynamic programming for distributed formation control of multi-UAV. J. Frankl. Inst. 2022, 359, 3671–3691. [Google Scholar] [CrossRef]
- Ma, J.; Sun, S. A general packet dropout compensation framework for optimal prior filter of networked multi-sensor systems. Inf. Fusion 2019, 45, 128–137. [Google Scholar] [CrossRef]
- Coelho, V.N.; Cohen, M.W.; Coelho, I.M.; Liu, N.; Guimarães, F.G. Multi-agent systems applied for energy systems integration: State-of-the-art applications and trends in microgrids. Appl. Energy 2017, 187, 820–832. [Google Scholar] [CrossRef]
- Zhang, S.; Chen, J.; Bai, C.; Li, J. Global iterative learning control based on fuzzy systems for nonlinear multi-agent systems with unknown dynamics. Inf. Sci. 2021, 587, 556–571. [Google Scholar] [CrossRef]
- Deng, X.; Sun, X.-X.; Liu, R.; Liu, S.-G. Consensus control of leader-following nonlinear multi-agent systems with distributed adaptive iterative learning control. Int. J. Syst. Sci. 2018, 49, 3247–3260. [Google Scholar] [CrossRef]
- Wu, Z.; Zhang, T.; Xia, X.; Hua, Y. Finite-time adaptive neural command filtered control for non-strict feedback uncertain multi-agent systems including prescribed performance and input nonlinearities. Appl. Math. Comput. 2022, 421, 126953. [Google Scholar] [CrossRef]
- Deng, X.; Sun, X. Distributed adaptive iterative learning control for the consensus tracking of heterogeneous nonlinear multi-agent systems. Trans. Inst. Meas. Control 2020, 42, 2396–2409. [Google Scholar] [CrossRef]
- He, L.; Dong, W. Distributed adaptive consensus tracking control for heterogeneous nonlinear multi-agent systems. ISA Trans. 2022. [Google Scholar] [CrossRef] [PubMed]
- Ma, T.; Zhang, Z.; Cui, B. Impulsive consensus of nonlinear fuzzy multi-agent systems under DoS attack. Nonlinear Anal. Hybrid Syst. 2022, 44, 101155. [Google Scholar] [CrossRef]
- Wang, Z.; Zhu, Y.; Xue, H.; Liang, H. Neural networks-based adaptive event-triggered consensus control for a class of multi-agent systems with communication faults. Neurocomputing 2021, 470, 99–108. [Google Scholar] [CrossRef]
- Chen, C.; Lewis, F.; Li, X. Event-triggered coordination of multi-agent systems via a Lyapunov-based approach for leaderless consensus. Automatica 2022, 136, 109936. [Google Scholar] [CrossRef]
- Meng, X.; Zhai, D.; Fu, Z.; Xie, X. Adaptive fault tolerant control for a class of switched nonlinear systems with unknown control directions. Appl. Math. Comput. 2019, 370, 124913. [Google Scholar] [CrossRef]
- Ma, J.; Xu, S.; Ma, Q.; Zhang, Z. Event-Triggered Adaptive Neural Network Control for Nonstrict-Feedback Nonlinear Time-Delay Systems with Unknown Control Directions. IEEE Trans. Neural Netw. Learn. Syst. 2019, 31, 4196–4205. [Google Scholar] [CrossRef]
- Zhao, J.; Tong, S.; Li, Y. Fuzzy adaptive output feedback control for uncertain nonlinear systems with unknown control gain functions and unmodeled dynamics. Inf. Sci. 2021, 558, 140–156. [Google Scholar] [CrossRef]
- Zhu, G.; Du, J.; Kao, Y. Command filtered robust adaptive NN control for a class of uncertain strict-feedback nonlinear systems under input saturation. J. Frankl. Inst. 2018, 355, 7548–7569. [Google Scholar] [CrossRef]
- Dong, H.; Gao, S.; Ning, B.; Tang, T.; Li, Y.; Valavanis, K.P. Error-Driven Nonlinear Feedback Design for Fuzzy Adaptive Dynamic Surface Control of Nonlinear Systems with Prescribed Tracking Performance. IEEE Trans. Syst. Man Cybern. Syst. 2017, 50, 1013–1023. [Google Scholar] [CrossRef]
- Wu, X.; Zheng, W.; Zhou, X.; Shao, S. Adaptive dynamic surface and sliding mode tracking control for uncertain QUAV with time-varying load and appointed-time prescribed performance. J. Frankl. Inst. 2021, 358, 4178–4208. [Google Scholar] [CrossRef]
- Guo, T.; Liu, Y.; Man, Y. Adaptive controller of nonlinear systems with unknown control directions and unknown input powers. Int. J. Robust Nonlinear Control 2020, 30, 7670–7689. [Google Scholar] [CrossRef]
- Shi, W.; Hou, M.; Hao, M. Adaptive robust dynamic surface asymptotic tracking for uncertain strict-feedback nonlinear systems with unknown control direction. ISA Trans. 2021, 121, 95–104. [Google Scholar] [CrossRef] [PubMed]
- Kamalamiri, A.; Shahrokhi, M.; Mohit, M. Adaptive finite-time neural control of non-strict feedback systems subject to output constraint, unknown control direction, and input nonlinearities. Inf. Sci. 2020, 520, 271–291. [Google Scholar] [CrossRef]
- Shojaei, F.; Arefi, M.M.; Khayatian, A.; Karimi, H.R. Observer-Based Fuzzy Adaptive Dynamic Surface Control of Uncertain Nonstrict Feedback Systems with Unknown Control Direction and Unknown Dead-Zone. IEEE Trans. Syst. Man Cybern. Syst. 2018, 49, 2340–2351. [Google Scholar] [CrossRef]
- Zhang, C.-H.; Yang, G.-H. Event-Triggered Adaptive Output Feedback Control for a Class of Uncertain Nonlinear Systems with Actuator Failures. IEEE Trans. Cybern. 2018, 50, 201–210. [Google Scholar] [CrossRef]
- Fan, D.; Zhang, X.; Liu, S.; Chen, X. Distributed control for output-constrained nonlinear multi-agent systems with completely unknown non-identical control directions. J. Frankl. Inst. 2021, 358, 8270–8287. [Google Scholar] [CrossRef]
- Lv, M.; Yu, W.; Cao, J.; Baldi, S. Consensus in High-Power Multiagent Systems with Mixed Unknown Control Directions via Hybrid Nussbaum-Based Control. IEEE Trans. Cybern. 2020, 52, 5184–5196. [Google Scholar] [CrossRef] [PubMed]
- Ao, W.; Huang, J.; Xue, F. Adaptive leaderless consensus control of a class of strict-feedback nonlinear multi-agent systems with unknown control directions: A non-Nussbaum function based approach. J. Frankl. Inst. 2020, 357, 12180–12196. [Google Scholar] [CrossRef]
- Rezaee, H.; Abdollahi, F. Adaptive Leaderless Consensus Control of Strict-Feedback Nonlinear Multiagent Systems with Unknown Control Directions. IEEE Trans. Syst. Man Cybern. Syst. 2020, 51, 6435–6444. [Google Scholar] [CrossRef]
- Cui, G.; Xu, S.; Ma, Q.; Li, Y.; Zhang, Z. Prescribed performance distributed consensus control for nonlinear multi-agent systems with unknown dead-zone input. Int. J. Control 2017, 91, 1053–1065. [Google Scholar] [CrossRef]
- Shahriari-kahkeshi, M.; Meskin, N. Adaptive cooperative control of nonlinear multi-agent systems with uncertain time-varying control directions and dead-zone nonlinearity. Neurocomputing 2021, 464, 151–163. [Google Scholar] [CrossRef]
- Wang, F.; Liu, Z.; Zhang, Y.; Chen, B. Distributed adaptive coordination control for uncertain nonlinear multi-agent systems with dead-zone input. J. Frankl. Inst. 2016, 353, 2270–2289. [Google Scholar] [CrossRef]
- Chen, K.; Wang, J.; Zhang, Y.; Liu, Z. Adaptive consensus of nonlinear multi-agent systems with unknown backlash-like hysteresis. Neurocomputing 2016, 175, 698–703. [Google Scholar] [CrossRef]
- Zhu, Z.-H.; Guan, Z.-H.; Hu, B.; Zhang, D.-X.; Cheng, X.-M.; Li, T. Semi-global bipartite consensus tracking of singular multi-agent systems with input saturation. Neurocomputing 2021, 432, 183–193. [Google Scholar] [CrossRef]
- Cheng, W.; Xue, H.; Liang, H.; Wang, W. Prescribed Performance Adaptive Fuzzy Control of Stochastic Nonlinear Multi-agent Systems with Input Hysteresis and Saturation. Int. J. Fuzzy Syst. 2021, 24, 91–104. [Google Scholar] [CrossRef]
- Lin, Z.; Liu, Z.; Zhang, Y.; Chen, C. Command filtered neural control of multi-agent systems with input quantization and unknown control direction. Neurocomputing 2021, 430, 47–57. [Google Scholar] [CrossRef]
- Shen, Q.; Jiang, B.; Shi, P.; Zhao, J. Cooperative Adaptive Fuzzy Tracking Control for Networked Unknown Nonlinear Multiagent Systems with Time-Varying Actuator Faults. IEEE Trans. Fuzzy Syst. 2013, 22, 494–504. [Google Scholar] [CrossRef]
- Roman, R.-C.; Precup, R.-E.; Petriu, E.M. Hybrid data-driven fuzzy active disturbance rejection control for tower crane systems. Eur. J. Control 2020, 58, 373–387. [Google Scholar] [CrossRef]
- Chi, R.; Li, H.; Shen, D.; Hou, Z.; Huang, B. Enhanced P-type Control: Indirect Adaptive Learning from Set-point Updates. IEEE Trans. Autom. Control 2022. [Google Scholar] [CrossRef]
- Liu, W.; Shu, F.; Xu, Y.; Ding, R.; Yang, X.; Li, Z.; Liu, Y. Iterative learning based neural network sliding mode control for repetitive tasks: With application to a PMLSM with uncertainties and external disturbances. Mech. Syst. Signal Process. 2022, 172, 108950. [Google Scholar] [CrossRef]
- Zhao, L.; Yu, J.; Lin, C.; Ma, Y. Adaptive Neural Consensus Tracking for Nonlinear Multiagent Systems Using Finite-Time Command Filtered Backstepping. IEEE Trans. Syst. Man Cybern. Syst. 2017, 48, 2003–2012. [Google Scholar] [CrossRef]
- Mendes, J.; Maia, R.; Araújo, R.; Souza, F.A.A. Self-Evolving Fuzzy Controller Composed of Univariate Fuzzy Control Rules. Appl. Sci. 2020, 10, 5836. [Google Scholar] [CrossRef]
- Shao, K.; Zheng, J.; Wang, H.; Wang, X.; Liang, B. Leakage-type adaptive state and disturbance observers for uncertain nonlinear systems. Nonlinear Dyn. 2021, 105, 2299–2311. [Google Scholar] [CrossRef]
- Shahvali, M.; Shojaei, K. Distributed adaptive neural control of nonlinear multi-agent systems with unknown control directions. Nonlinear Dyn. 2015, 83, 2213–2228. [Google Scholar] [CrossRef]
















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, X.; Zhang, X. Adaptive Fuzzy Tracking Control of Uncertain Nonlinear Multi-Agent Systems with Unknown Control Directions and a Dead-Zone Fault. Mathematics 2022, 10, 2655. https://doi.org/10.3390/math10152655
Deng X, Zhang X. Adaptive Fuzzy Tracking Control of Uncertain Nonlinear Multi-Agent Systems with Unknown Control Directions and a Dead-Zone Fault. Mathematics. 2022; 10(15):2655. https://doi.org/10.3390/math10152655
Chicago/Turabian StyleDeng, Xiongfeng, and Xiyu Zhang. 2022. "Adaptive Fuzzy Tracking Control of Uncertain Nonlinear Multi-Agent Systems with Unknown Control Directions and a Dead-Zone Fault" Mathematics 10, no. 15: 2655. https://doi.org/10.3390/math10152655
APA StyleDeng, X., & Zhang, X. (2022). Adaptive Fuzzy Tracking Control of Uncertain Nonlinear Multi-Agent Systems with Unknown Control Directions and a Dead-Zone Fault. Mathematics, 10(15), 2655. https://doi.org/10.3390/math10152655