
Output Tracking Control of Random Nonlinear Time-Varying Systems

{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (1)
- This paper is the first result on the output tracking topic of high-order RNSs with time-varying powers. To extend the order of the system to the time-varying power domain, a new method is proposed to design the controller to achieve stability analysis. Different from [15]’s method, the time-varying order of the system considered in this paper is not uniform and we consider different orders, i.e., , .
- (2)
- Unlike the deterministic systems [16], the systems studied in this paper are perturbed by SOMP. In the controller design, how to reasonably separate the SOMP from the nonlinear functions is a challenging problem. This is completely different from the designs with white noise in [1,2,3,4,5,6,7,8,9,10,11,12,13,14,15].
2. Control Design and Analysis
2.1. Controller Design
2.2. Stability Analysis
- (1)
- The closed-loop system has a unique solution on ;
- (2)
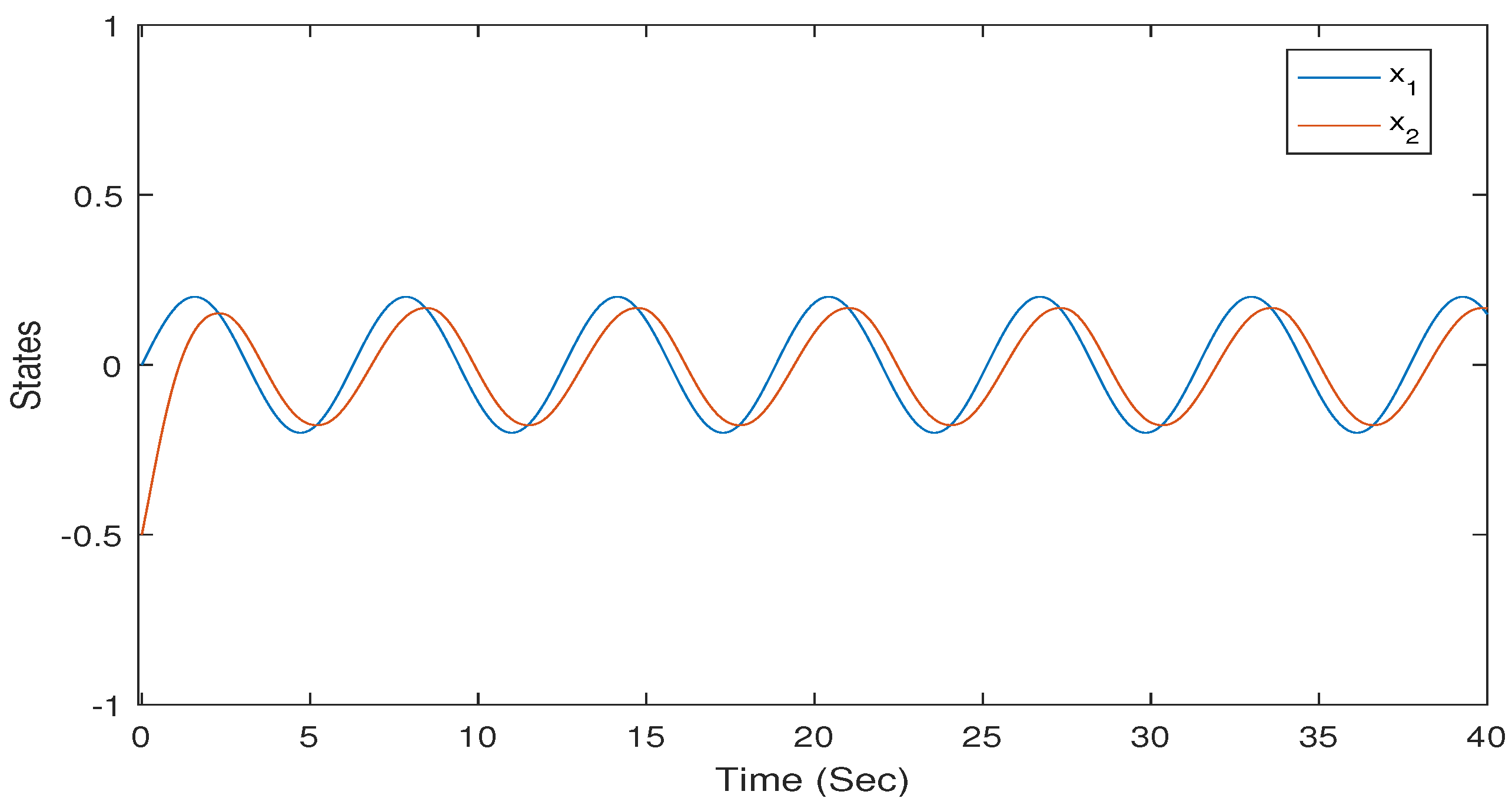
- All the states of the closed-loop system are bounded in probability;
- (3)
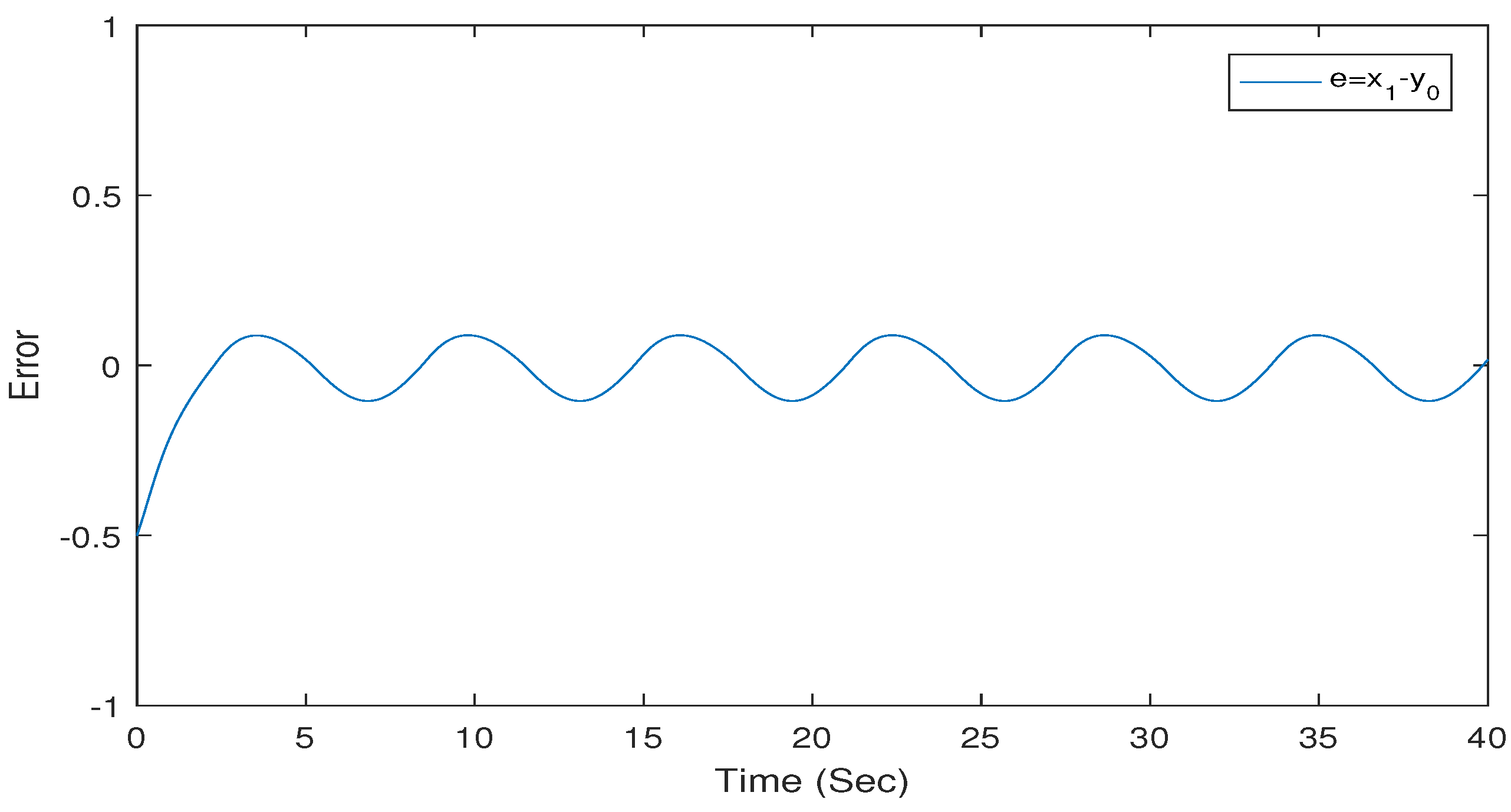
- The fourth moment of the tracking error can be tuned to be arbitrarily small.
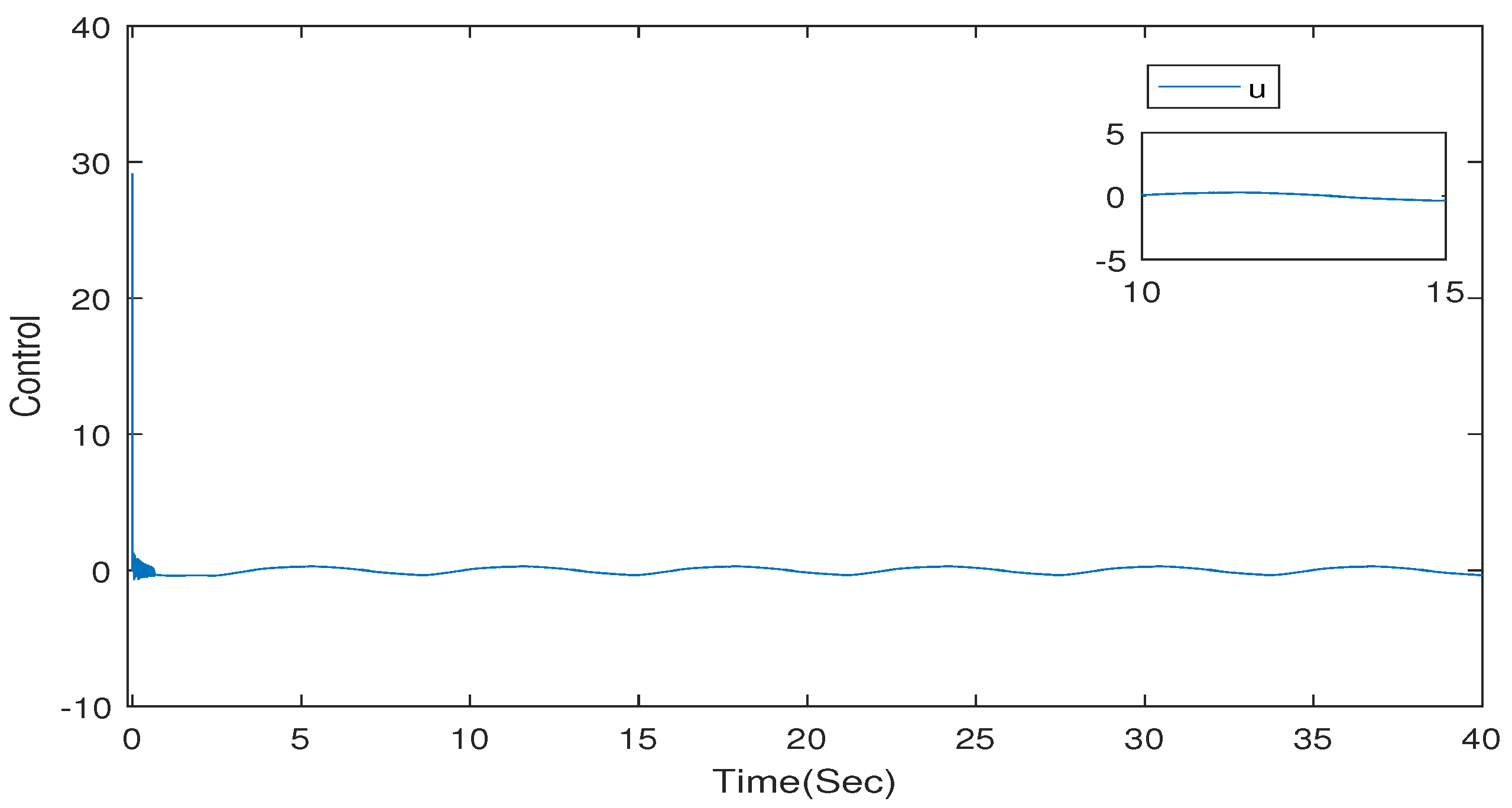
3. A Simulation Example
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| SNSs | stochastic nonlinear systems |
| RNSs | random nonlinear systems |
| SOMP | second-order moment process |
References
- Zhang, T.P.; Xiao, X.N. Adaptive output feedback tracking control of stochastic nonlinear systems with dynamic uncertainties. Int. J. Robust Nonlin. 2015, 25, 1282–1300. [Google Scholar] [CrossRef]
- Li, W.Q.; Krstic, M. Stochastic adaptive nonlinear control with filterless least-squares. IEEE Trans. Autom. Control 2021, 66, 3893–3905. [Google Scholar] [CrossRef]
- Niu, B.; Wang, D.; Alotaibi, N.D.; Alsaadi, F.E. Adaptive neural state-feedback tracking control of stochastic nonlinear switched systems: An average dwell-time method. IEEE Trans. Neur. Net. Learn. 2019, 30, 1076–1087. [Google Scholar] [CrossRef] [PubMed]
- Jin, S.L.; Liu, Y.G.; Man, Y.C. Global output-feedback stabilization for stochastic nonlinear systems with function control coefficients. Asian J. Control 2016, 18, 1189–1199. [Google Scholar] [CrossRef]
- Li, W.Q.; Krstic, M. Mean-nonovershooting control of stochastic nonlinear systems. IEEE Trans. Autom. Control 2021, 66, 5756–5771. [Google Scholar] [CrossRef]
- Li, W.Q.; Krstic, M. Stochastic nonlinear prescribed-time stabilization and inverse optimality. IEEE Trans. Autom. Control 2022, 67, 1179–1193. [Google Scholar] [CrossRef]
- Cui, R.H.; Xie, X.J. Finite-time stabilization of stochastic low-order nonlinear systems with time-varying orders and FT-SISS inverse dynamics. Automatica 2021, 125, 109418. [Google Scholar] [CrossRef]
- Naifar, O.; Ben, M.A.; Hammami, M.A.; Ouali, A. On Observer Design for a Class of Nonlinear Systems Including Unknown Time-Delay. Mediterr. J. Math. 2016, 13, 2841–2851. [Google Scholar] [CrossRef]
- Jmal, A.; Ben Makhlouf, A.; Nagy, A.M.; Naifar, O. Finite-time stability for Caputo–Katugampola fractional-order time-delayed neural networks. Neural Process. Lett. 2019, 50, 607–621. [Google Scholar] [CrossRef]
- Cui, R.H.; Xie, X.J. Finite-time stabilization of output-constrained stochastic high-order nonlinear systems with high-order and low-order nonlinearities. Automatica 2022, 136, 110085. [Google Scholar] [CrossRef]
- Cui, R.H.; Xie, X.J. Adaptive state-feedback stabilization of state-constrained stochastic high-order nonlinear systems. Sci. China Inf. Sci. 2021, 64, 200203. [Google Scholar] [CrossRef]
- Peng, J.M.; Wang, J.N.; Shan, J.Y. Robust cooperative output tracking of networked high-order power integrators systems. Int. J. Control 2016, 89, 270–280. [Google Scholar] [CrossRef]
- Liu, J.Z.; Yan, S.; Zeng, D.L.; Lv, Y. A dynamic model used for controller design of a coal fired once-through boiler-turbine unit. IEEE Trans. Auto. Control 2015, 93, 2069–2078. [Google Scholar] [CrossRef]
- Rui, C.; Reyhangolu, M.; Kolmanovsky, I.; McClamroch, N.H. Nonsmooth stabilization of an underactuated unstable two degrees of freedom mechanical system. In Proceedings of the 36th IEEE Conference on Decision and Control, San Diego, CA, USA, 10–12 December 1997; Volume 4, pp. 3998–4003. [Google Scholar] [CrossRef]
- Li, W.Q.; Liu, Y.; Yao, X.X. State-feedback stabilization and inverse optimal control for stochastic high-order nonlinear systems with time varying powers. Asian J. Control 2021, 23, 739–750. [Google Scholar] [CrossRef]
- Man, Y.C.; Liu, Y.G. Global adaptive stabilization and practical tracking for nonlinear systems with unknown powers. Automatica 2019, 100, 171–181. [Google Scholar] [CrossRef]
- Bertram, J.; Sarachik, P. Stability of circuits with randomly timevarying parameters. IRE Trans. Circuit Theory 1959, 6, 260–270. [Google Scholar] [CrossRef]
- Soong, T.T. Random Differential Equations in Science and Engineering. Math. Sci. Eng. 1973, 103. [Google Scholar] [CrossRef]
- Wu, Z.J. Stability criteria of random nonlinear systems and their applications. IEEE Trans. Autom. Control. 2015, 60, 1038–1049. [Google Scholar] [CrossRef]
- Wu, Z.J.; Karimi, H.R.; Shi, P. Practical trajectory tracking of random Lagrange systems. Automatica 2019, 105, 314–322. [Google Scholar] [CrossRef]
- Yao, L.Q.; Zhang, W.H. Adaptive tracking of random nonlinear system. Int. J. Robust Nonlin. 2017, 27, 3833–3840. [Google Scholar] [CrossRef]
- Wu, Z.J.; Wang, S.T.; Cui, M.Y. Tracking controller design for random nonlinear benchmark system. J. Frank. Inst. 2017, 354, 360–371. [Google Scholar] [CrossRef]
- Li, W.Q.; Liu, L.; Feng, G. Cooperative control of multiple nonlinear benchmark systems perturbed by second-order moment processes. IEEE Trans. Cybern. 2020, 50, 902–910. [Google Scholar] [CrossRef] [PubMed]
- Yao, L.Q.; Zhang, W.H.; Xie, X.J. Stability analysis of random nonlinear systems with time-varying delay and its application. Automatica 2021, 117, 108994. [Google Scholar] [CrossRef]
- Jiao, T.C.; Zheng, H.C.; Xu, S.Y. Unified stability criteria of random nonlinear time-varying impulsive switched systems. IEEE Trans. Circuits Syst. I 2020, 67, 3099–3112. [Google Scholar] [CrossRef]
- Shan, Q.H.; Zhang, H.G.; Wang, Z.S.; Zhang, Z. Global asymptotic stability and stabilization of neural networks with general noise. IEEE Trans. Neur. Net. Lear. 2018, 29, 597–607. [Google Scholar] [CrossRef]
- Chen, C.C.; Qian, C.J.; Lin, X.Z.; Sun, Z.Y.; Liang, Y.W. Smooth output feedback stabilization for a class of nonlinear systems with time-varying powers. Int. J. Robust Nonlinear Control. 2017, 27, 5113–5128. [Google Scholar] [CrossRef]
- Huang, H.; Shirkhani, M.; Tavoosi, J.; Mahmoud, O. A New Intelligent Dynamic Control Method for a Class of Stochastic Nonlinear Systems. Mathematics 2022, 10, 1406. [Google Scholar] [CrossRef]
- Zhu, C.; He, L.; Zhang, K.; Sun, W.; He, Z. Optimal Timing Fault Tolerant Control for Switched Stochastic Systems with Switched Drift Fault. Mathematics 2022, 10, 1880. [Google Scholar] [CrossRef]
- Li, W.Q.; Yao, X.X.; Krstic, M. Adaptive-gain observer-based stabilization of stochastic strict-feedback systems with sensor uncertainty. Automatica 2020, 120, 109112. [Google Scholar] [CrossRef]
- Li, W.Q.; Krstic, M. Prescribed-time output-feedback control of stochastic nonlinear systems. IEEE Trans. Autom. Control. 2022, 68. [Google Scholar] [CrossRef]
- Ayadi, M.; Naifar, O.; Derbel, N. High-order sliding mode control for variable speed PMSG-wind turbine-based disturbance observer. Int. J. Model. Identif. Control. 2019, 32, 85–92. [Google Scholar] [CrossRef]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, R.; Wang, H.; Li, W.; Niu, B. Output Tracking Control of Random Nonlinear Time-Varying Systems. Mathematics 2022, 10, 2524. https://doi.org/10.3390/math10142524
Wang R, Wang H, Li W, Niu B. Output Tracking Control of Random Nonlinear Time-Varying Systems. Mathematics. 2022; 10(14):2524. https://doi.org/10.3390/math10142524
Chicago/Turabian StyleWang, Ruitao, Hui Wang, Wuquan Li, and Ben Niu. 2022. "Output Tracking Control of Random Nonlinear Time-Varying Systems" Mathematics 10, no. 14: 2524. https://doi.org/10.3390/math10142524
APA StyleWang, R., Wang, H., Li, W., & Niu, B. (2022). Output Tracking Control of Random Nonlinear Time-Varying Systems. Mathematics, 10(14), 2524. https://doi.org/10.3390/math10142524