
The New Second-Order Sliding Mode Control Algorithm


Abstract
:1. Introduction
- finite time convergence to the sliding manifold;
- full suppression of bounded external perturbations, which belong to the control space;
- reduction of the dynamical order of the system during motion along the sliding manifold.
2. Basic Definitions and Methods
3. Problem Statement
4. Main Result
4.1. Motivation
4.2. Control Algorithm Choice
- (1)
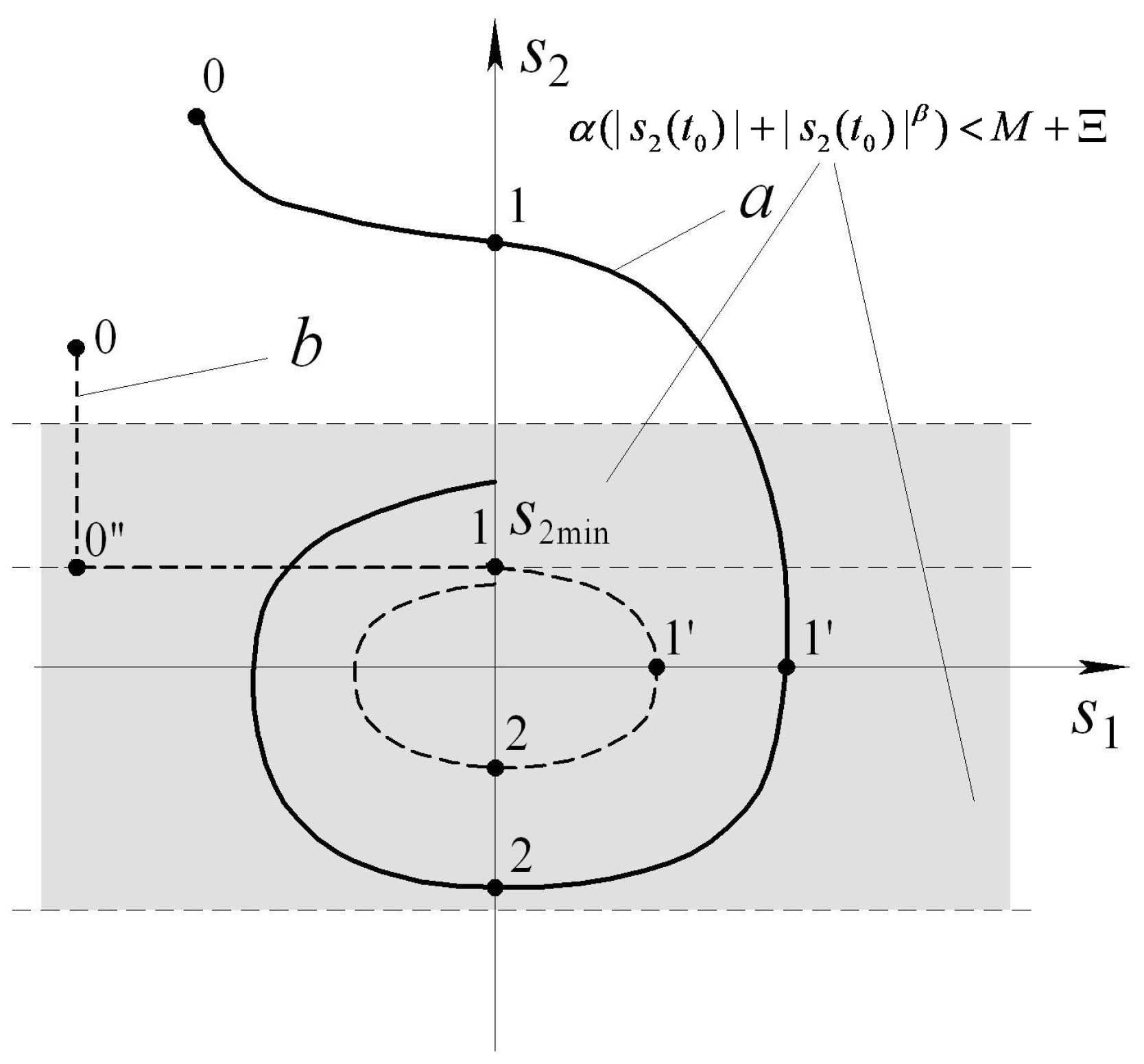
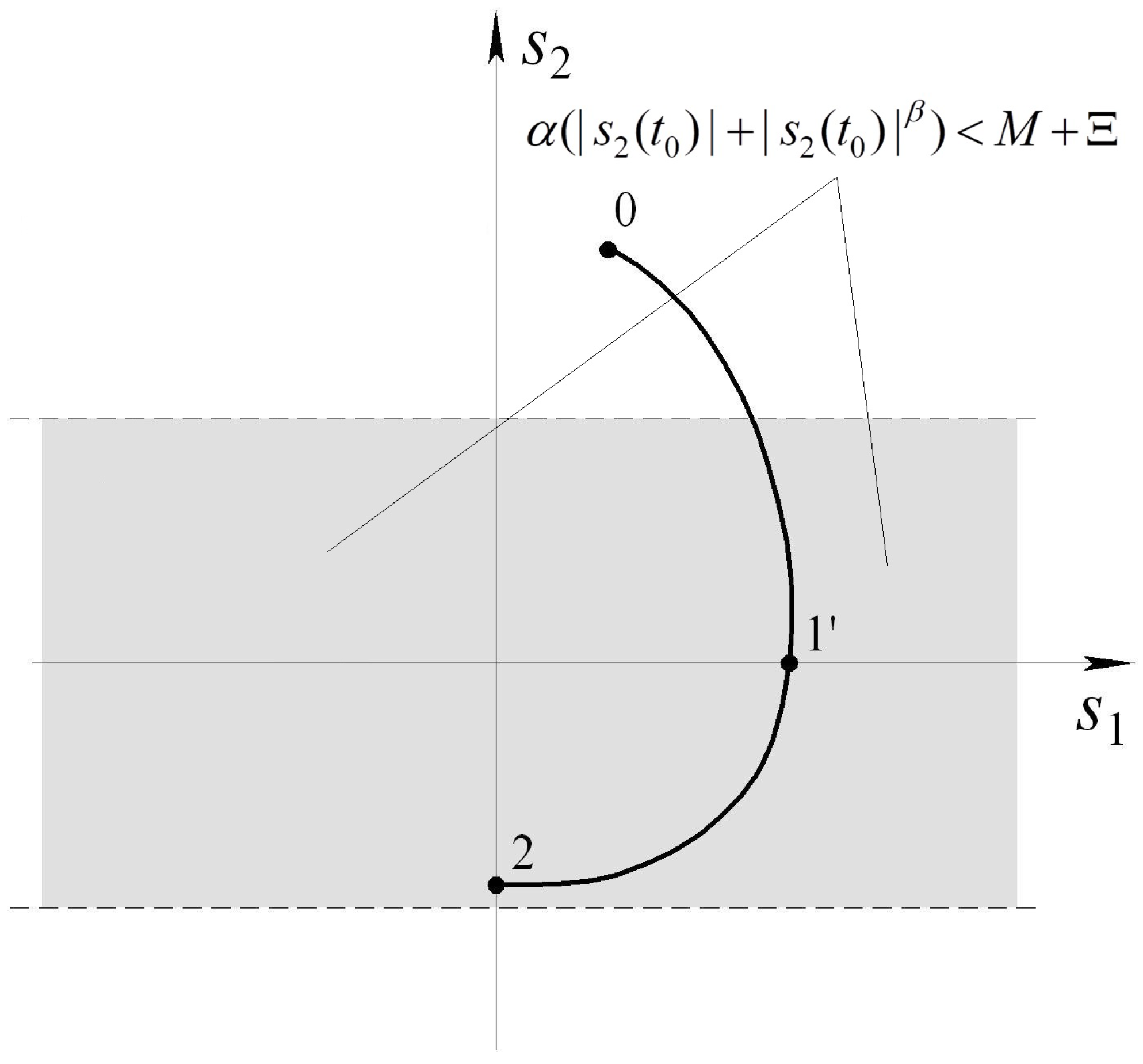
- hitting the area
- (2)
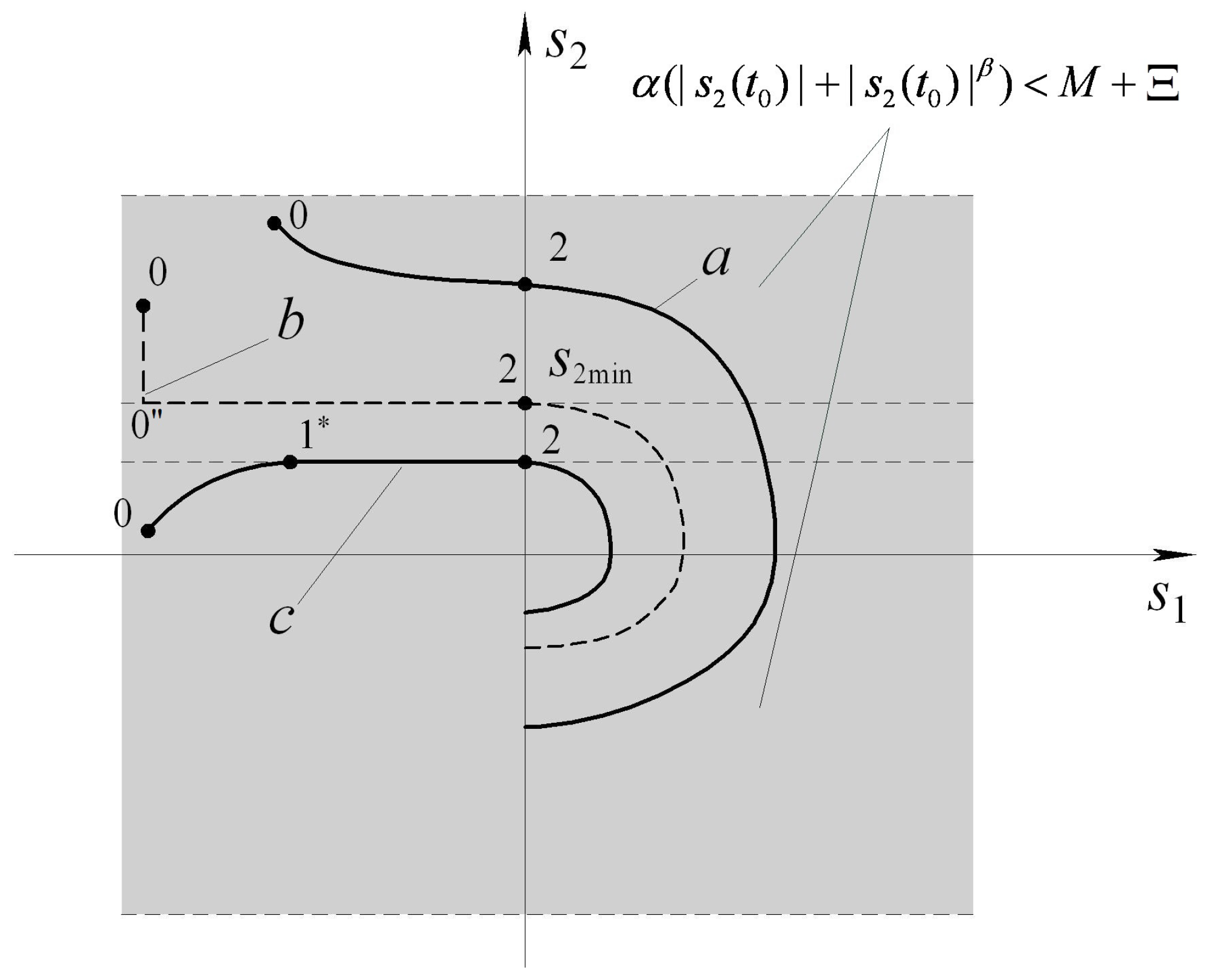
- convergence to the zonewhere is some positive constant, which will be introduced below;
- (3)
- movement in the vicinity of the originto zero in finite time.
- (1)
- is the initial moment of time;
- (2)
- is the time instant at which ;
- (3)
- is the time instant at which ;
- (4)
- is the time instant at which ;
- (5)
- is the time instant at which ;
- (6)
- is the time instant at which , ;
- (7)
- is the time instant of second-order sliding mode arising.
4.3. Estimation of the Time to Hit -Area
4.4. Special Case of Motion in -Area
4.5. Estimated Time to Hit -Area
4.6. Estimation of Motion Time in -Domain
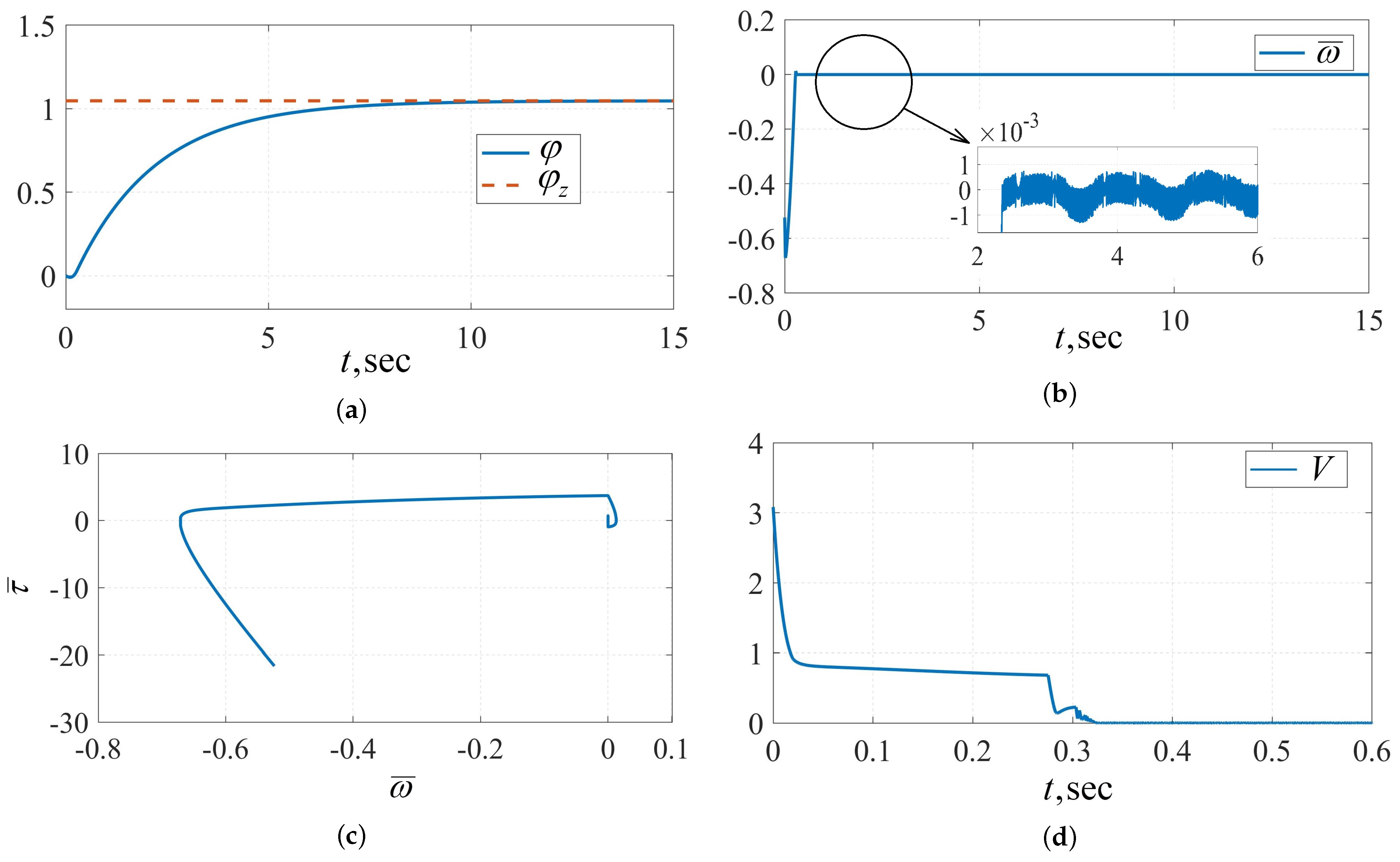
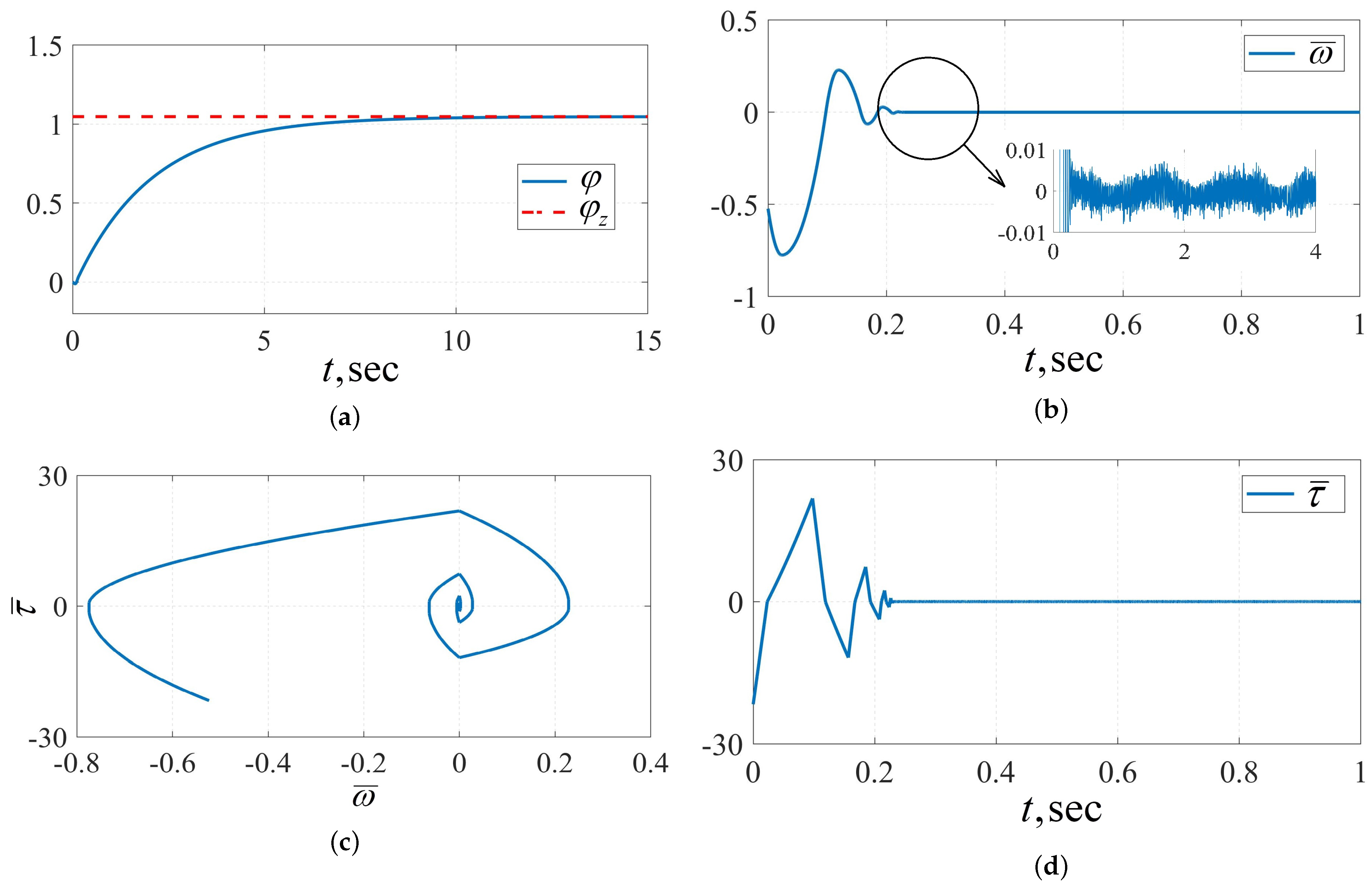
5. Numerical Example
- Experiment 4. To demonstrate the dependence of the steady-state control error on the switching frequency of the relay, the simulation is provided for closed-loop systems (8), (61) and (62) and (8), (61) and (63) using the Euler method with different integration steps . The simulation results are shown in Table 4.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Utkin, V.I.; Guldner, J.; Shi, J. Sliding Mode Control in Electromechanical Systems; Tailor and Francis: London, UK, 2009. [Google Scholar]
- Edwards, C.; Spurgeon, S. Sliding Mode Control: Theory and Applications; Taylor and Francis: London, UK, 1998. [Google Scholar]
- Emelyanov, S.V.; Korovin, S.K.; Levant, L. The new class of second order sliding mode. Math. Model. Comput. Simul. 1990, 2, 89–100. [Google Scholar]
- Emelyanov, S.V.; Korovin, S.K.; Levant, A. High-order sliding modes in control systems. Comput. Math. Model. 1996, 7, 294–318. [Google Scholar] [CrossRef]
- Levant, A. Sliding order and sliding accuracy in sliding mode control. Int. J. Control 1993, 58, 1247–1263. [Google Scholar] [CrossRef]
- Levant, A. Higher order sliding modes, differentiation and output feedback control. Int. J. Control 2003, 76, 924–941. [Google Scholar] [CrossRef]
- Bartolini, G.; Ferrara, A.; Usai, E. Chattering avoidance by second-order sliding mode control. IEEE Trans. Autom. Control 1998, 43, 241–246. [Google Scholar] [CrossRef]
- Bartolini, G.; Ferrara, A.; Levant, A.; Usai, E. On second order sliding mode controllers. In Variable Structure Systems, Sliding Mode and Nonlinear Control; Lecture Notes in Control and Information Science; Young, K.D., Ozguner, U., Eds.; Springer: London, UK, 1999; Volume 247, pp. 329–350. [Google Scholar]
- Levant, A. Principles of 2-sliding mode design. Automatica 2007, 43, 576–586. [Google Scholar] [CrossRef] [Green Version]
- Kochetkov, S.A.; Utkin, V.A. Providing the invariance property on the basis on oscillation modes. Dokl. Math. 2013, 88, 618–623. [Google Scholar] [CrossRef]
- Kochetkov, S.A.; Utkin, V.A. Invariance in systems with unmatched perturbations. Autom. Remote Control 2013, 74, 1097–1127. [Google Scholar] [CrossRef]
- Shtessel, Y.B.; Moreno, J.A.; Fridman, L.M. Twisting sliding mode control with adaptation: Lyapunov design, methodology and application. Automatica 2017, 75, 229–235. [Google Scholar] [CrossRef]
- Chen, B.; Geng, Y. Super twisting controller for on-orbit servicing to non-cooperative target. Chin. J. Aeronaut. 2015, 28, 285–293. [Google Scholar] [CrossRef] [Green Version]
- Chen, B.; Geng, Y. Modified super twisting controller for servicing to uncontrolled spacecraft. J. Syst. Eng. Electron. 2015, 26, 334–345. [Google Scholar] [CrossRef]
- González-Hernández, I.; Salazar, S.; Lozano, R.; Ramírez-Ayala, O. Real-Time Improvement of a Trajectory-Tracking Control Based on Super-Twisting Algorithm for a Quadrotor Aircraft. Drones 2022, 6, 36. [Google Scholar] [CrossRef]
- Edwards, C.; Shtessel, Y. Adaptive continuous higher order sliding mode control. Automatica 2016, 65, 183–190. [Google Scholar] [CrossRef] [Green Version]
- Mendoza-Avila, J.; Moreno, J.A.; Fridman, L.M. Continuous Twisting Algorithm for Third Order Systems. IEEE Trans. Autom. Control 2020, 65, 2812–2825. [Google Scholar] [CrossRef]
- Mofid, O.; Mobayen, S.; Zhang, C.; Esakki, B. Desired tracking of delayed quadrotor UAV under model uncertainty and wind disturbance using adaptive super-twisting terminal sliding mode control. ISA Trans. 2022, 123, 455–471. [Google Scholar] [CrossRef] [PubMed]
- Fikhtengol’ts, G.M. The Fundamentals of Mathematical Analysis: International Series of Monographs in Pure and Applied Mathematics; Pergamon Press: Oxford, UK, 2016; Volume 72. [Google Scholar]
- Filippov, A.F. Differential Equations with Discontinuous Right-Hand Sides; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1988. [Google Scholar]
- Orlov, Y. Finite time stability and robust control synthesis of uncertain switched systems. SIAM J. Control Optim. 2005, 43, 1253–1271. [Google Scholar] [CrossRef]
- Bhat, S.P.; Bernstein, D.S. Continuous finite-time stabilization of the translational and rotational double integrators. IEEE Trans. Autom. Control 1998, 43, 678–682. [Google Scholar] [CrossRef] [Green Version]
- Hahn, W. Theory and Application of Liapunov’s Direct Method; Prentice-Hall: Englewood Cliffs, NJ, USA, 1963. [Google Scholar]
- Ryan, E.P. An integral invariance principle for differential inclusions with applications in adaptive control. SIAM J. Control. Optim. 1998, 36, 960–980. [Google Scholar] [CrossRef]
- Orlov, Y. Extended invariance principle and other analysis tools for variable structure systems. In Advances in Variable Structure and Sliding Mode Control; Edwards, C., Colet, E.F., Fridman, L., Eds.; Springer: New York, NY, USA, 2006; pp. 3–22. [Google Scholar]
- Moreno, J.; Osorio, M. Strict Lyapunov functions for the super-twisting algorithm. IEEE Trans. Autom. Control 2012, 57, 1035–1040. [Google Scholar] [CrossRef]
- Zubov, V.I. Methods of A.M. Lyapunov and Their Application; Noordhoff Ltd.: Groningen, The Netherlands, 1964. [Google Scholar]
- Zubov, V.I. Analytic construction of Lyapunov functions. Dokl. Math. 1994, 49, 414–417. [Google Scholar]
- Dubljević, S.; Kazantzis, N. A new Lyapunov design approach for nonlinear systems based on Zubov’s method. Automatica 2002, 38, 1999–2007. [Google Scholar] [CrossRef]
- Polyakov, A.E.; Poznyak, A.S. Method of Lyapunov functions for systems with higher-order sliding modes. Autom. Remote Control 2011, 72, 944–963. [Google Scholar] [CrossRef]
- Polyakov, A.; Poznyak, A. Lyapunov function design for finite-time convergence analysis: “twisting” controller for second order sliding mode realization. Automatica 2009, 45, 444–448. [Google Scholar] [CrossRef]
- Polyakov, A.; Poznyak, A. Reaching Time Estimation for “super-twisting” second order sliding mode controller via Lyapunov function designing. IEEE Trans. Autom. Control 2009, 54, 1951–1955. [Google Scholar] [CrossRef]
- Utkin, V. On convergence time and disturbance rejection of super-twisting control. IEEE Trans. Autom. Control 2013, 58, 2013–2017. [Google Scholar] [CrossRef]
- Sanders, J.A.; Verhulst, F.; Murdock, J. Averaging Methods in Nonlinear Dynamical Systems; Applied Mathematical Sciences; Springer Science+Business Media: Ney York, NY, USA, 2007; Volume 59. [Google Scholar]
- Zwillinger, D. Handbook of Differential Equations; Academic Press: San Diego, CA, USA, 1997. [Google Scholar]
- Coddington, E.A.; Levinson, N. Theory of Ordinary Differential Equations; McGraw-Hill: New York, NY, USA, 1955. [Google Scholar]
- Teschl, G. Ordinary Differential Equations and Dynamical Systems; American Mathematical Society: Providence, RI, USA, 2012. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 10 | ||||
| 36 | 18 | 18 | 5/50 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kochetkov, S.; Krasnova, S.A.; Utkin, V.A. The New Second-Order Sliding Mode Control Algorithm. Mathematics 2022, 10, 2214. https://doi.org/10.3390/math10132214
Kochetkov S, Krasnova SA, Utkin VA. The New Second-Order Sliding Mode Control Algorithm. Mathematics. 2022; 10(13):2214. https://doi.org/10.3390/math10132214
Chicago/Turabian StyleKochetkov, Sergey, Svetlana A. Krasnova, and Victor A. Utkin. 2022. "The New Second-Order Sliding Mode Control Algorithm" Mathematics 10, no. 13: 2214. https://doi.org/10.3390/math10132214
APA StyleKochetkov, S., Krasnova, S. A., & Utkin, V. A. (2022). The New Second-Order Sliding Mode Control Algorithm. Mathematics, 10(13), 2214. https://doi.org/10.3390/math10132214