The Development of 1Balance: A Connected Medical Device for Measuring Human Balance


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
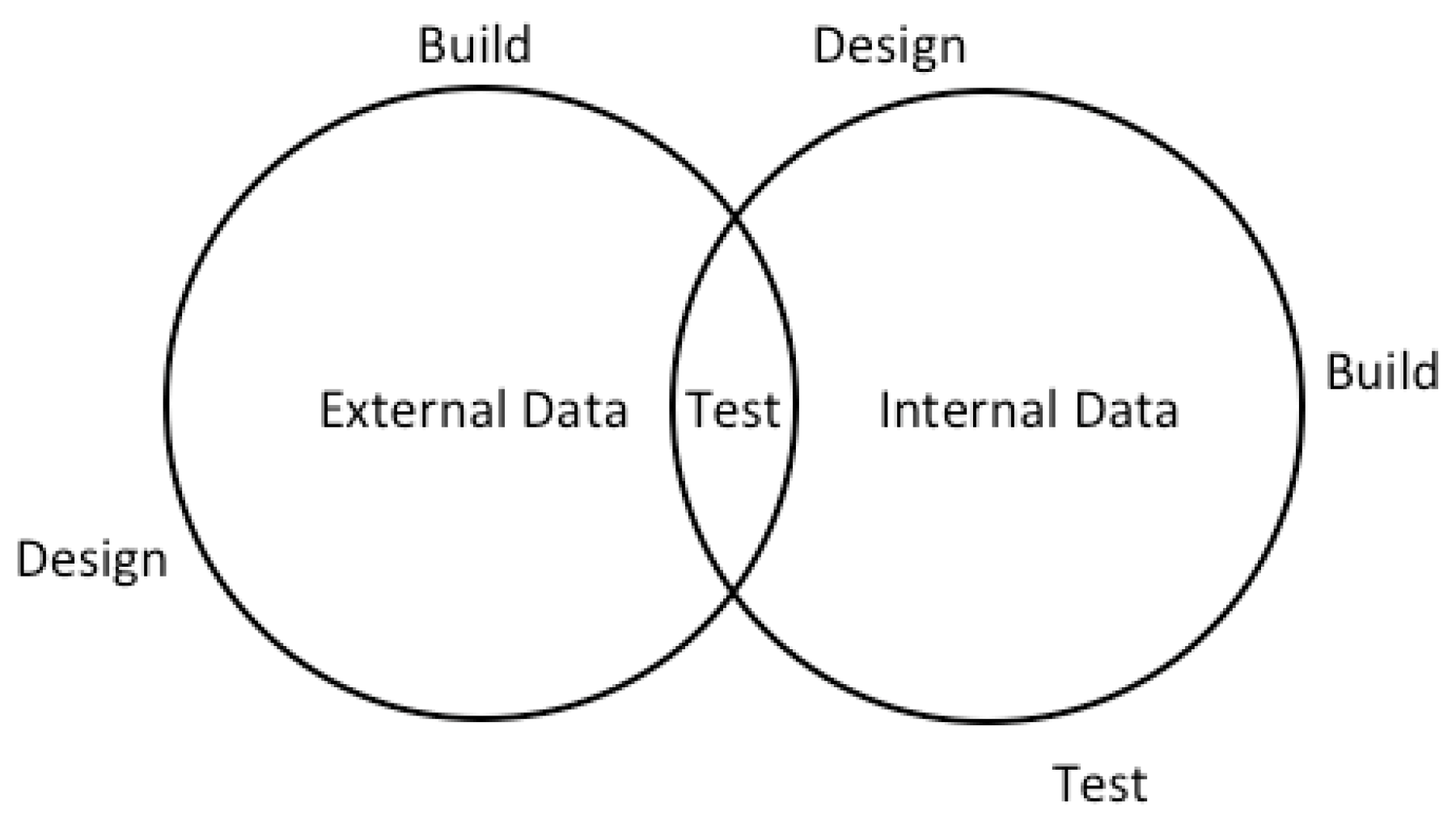
2.1. Wayfaring with the Data
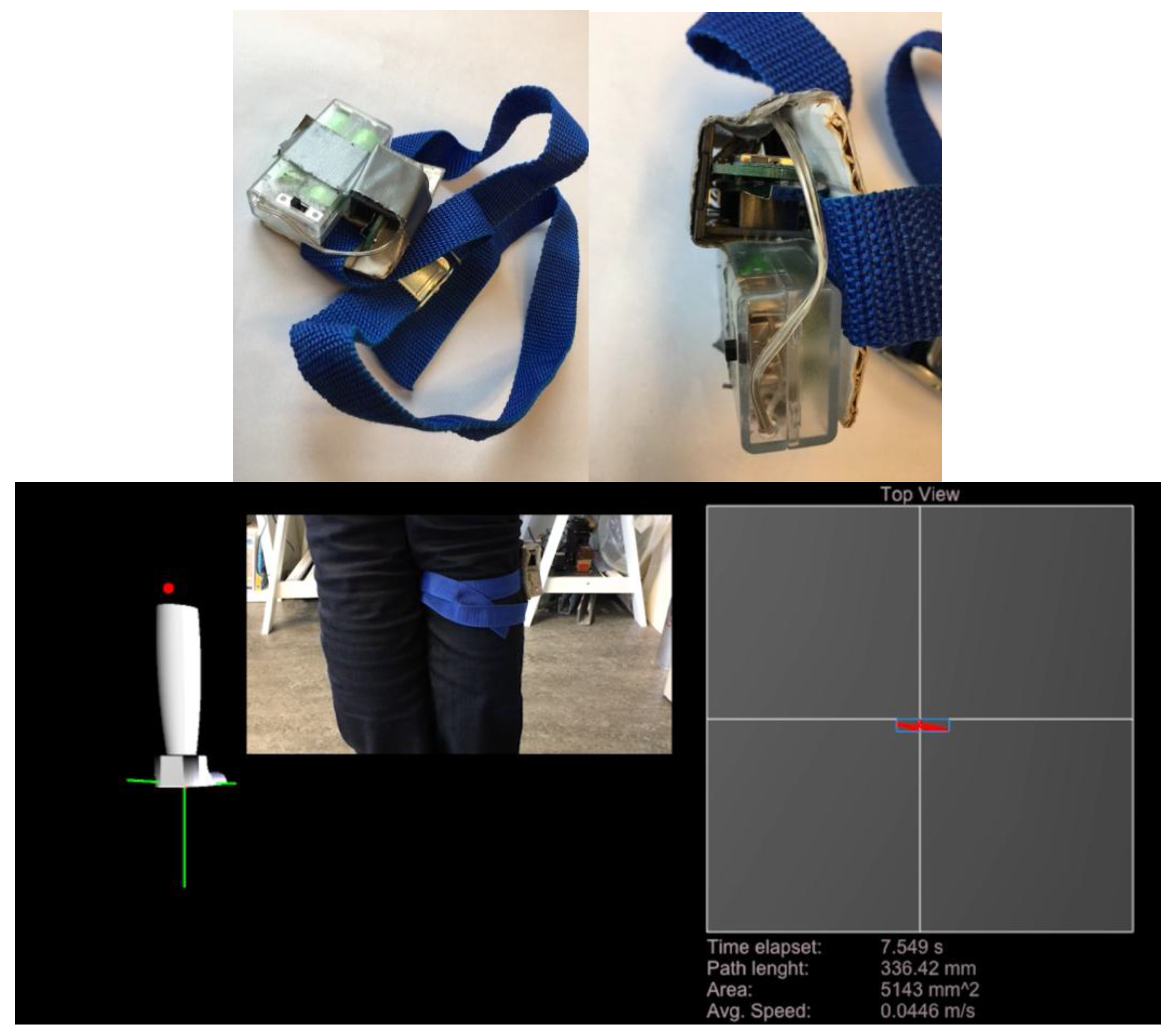
2.2. Arduino Prototype
- A Light Blue Bean (Punch Through Design, San Francisco, CA, USA), an Arduino microcontroller with embedded Bluetooth radio
- Adafruit BNO055 (Bosch, Stuttgart, Germany) Absolute Orientation Sensor
- AA-battery holder
- Cardboard frame
- Piece of duct tape
- Redundant SD card
- A fabric strap
- Processing 3
- Arduino IDE
- Bean Loader (a serial wrapper for Bluetooth)
- Adafruit_BNO055 libraries for Arduino
- Measurement time
- Traveled path length of the sensor
- Area of the sensor visited
- Standard deviation of the velocity
- The Romberg’s quotients (RQs) of the aforementioned attributes
2.3. Lunge Prototype
2.4. Data Collection Prototype
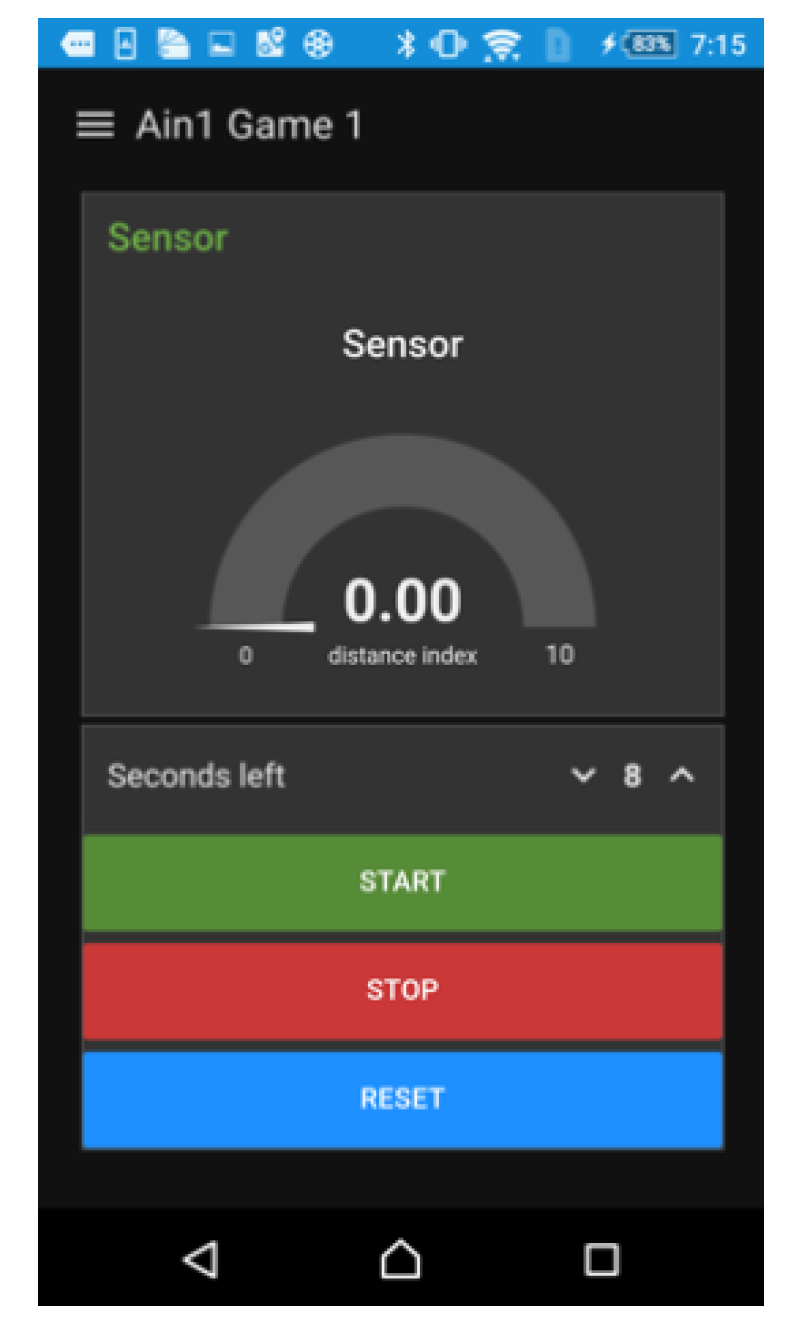
2.5. The Game Prototype
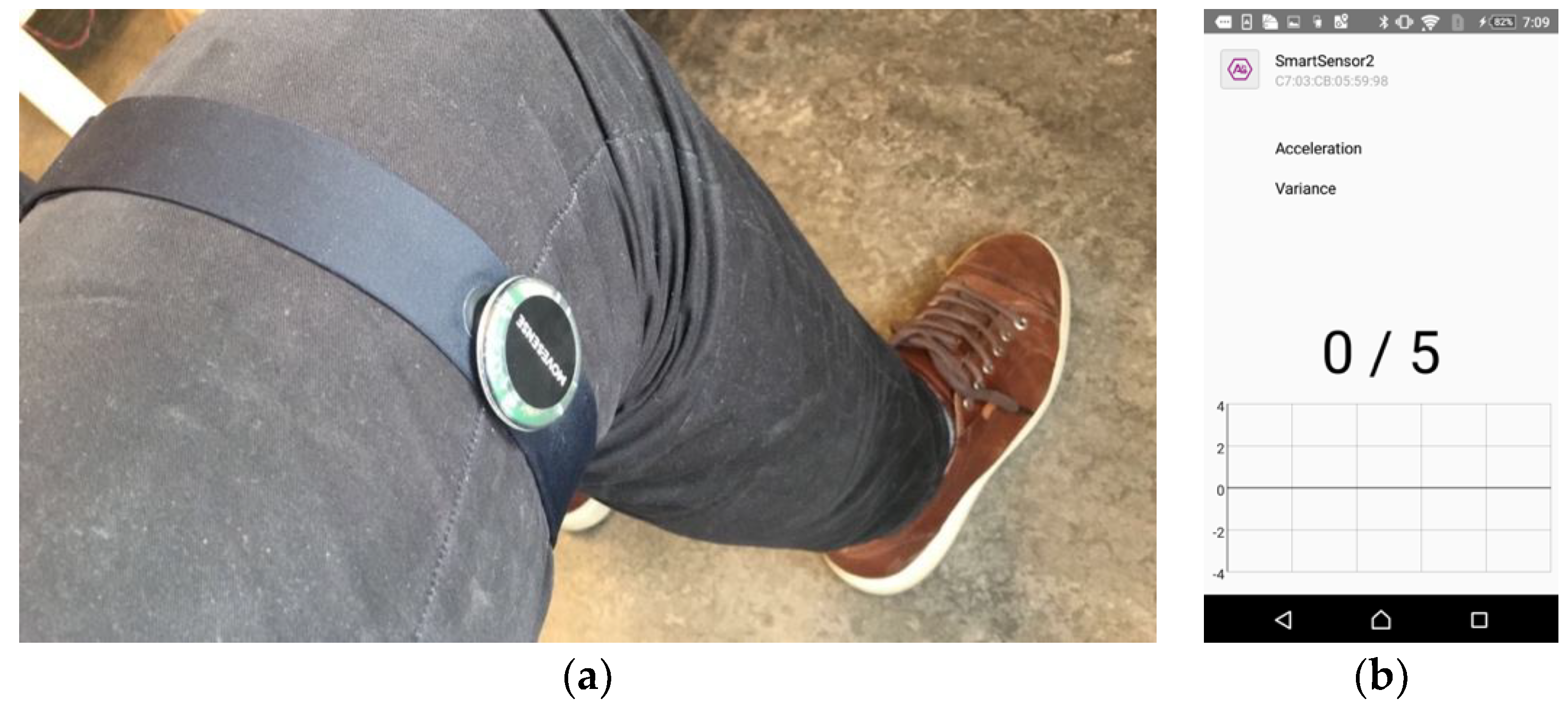
2.6. CES Demo Prototype
- Hardware:
- ○
- 9.7” Samsung Galaxy S3 tablet with Android 7 (Nougat)
- ○
- Movesense sensor and a chest strap
- Software:
- ○
- Android Studio
- ○
- Movesense sensor’s Android libraries
- ○
- 1Balance user interface for Android devices
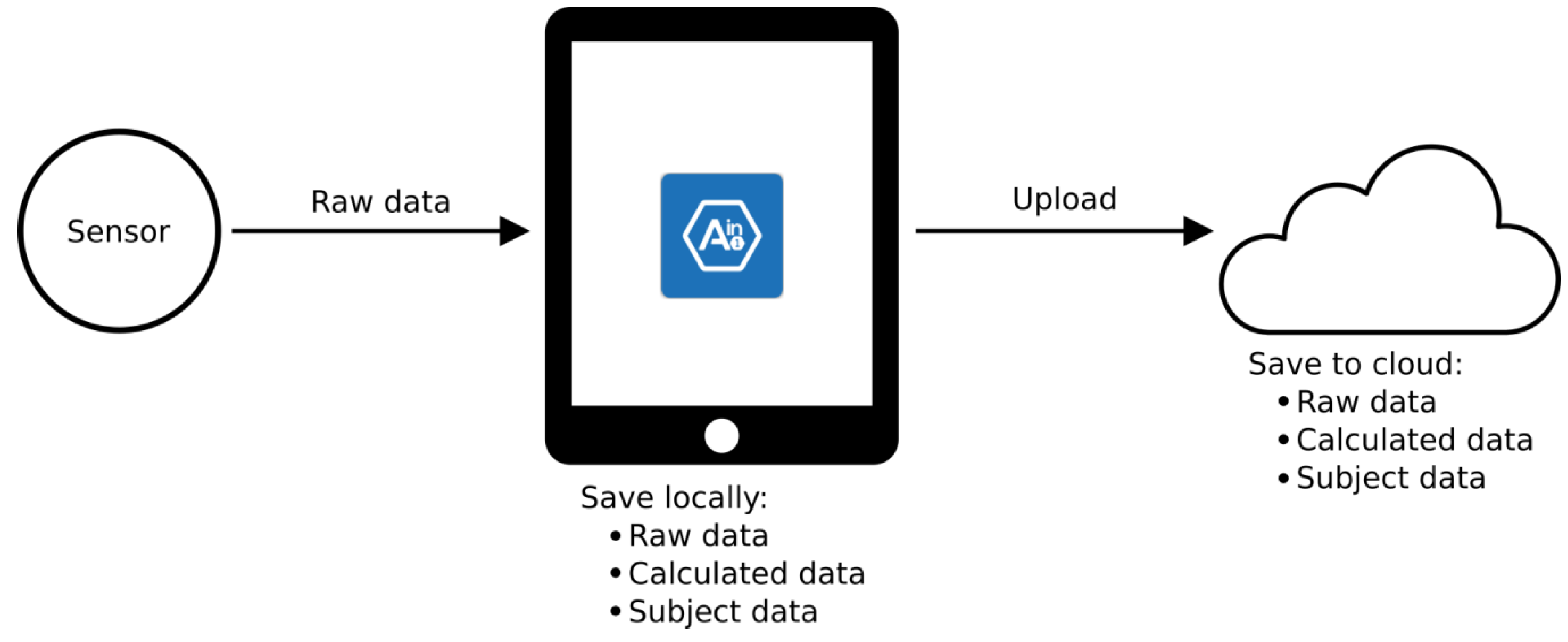
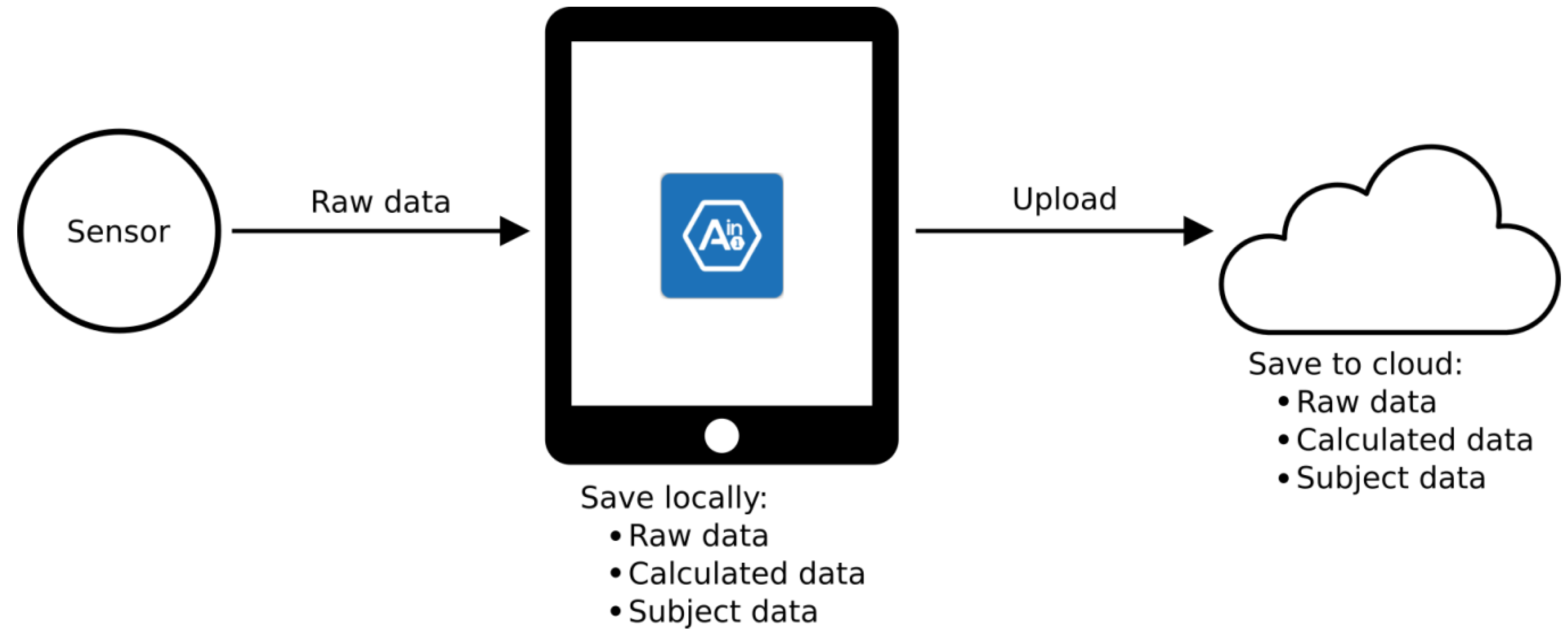
- Data:
- ○
- Raw data:
- ▪
- Accelerometer
- ▪
- Gyroscope
- ▪
- Magnetometer
- ○
- Calculated data
- ▪
- Subject’s sway
- Path length
- VelocitySD
- Area
- ▪
- Romberg’s quotients of the aforementioned attributes
- ○
- Subject data:
- ▪
- Age
- ▪
- Height
- ▪
- Weight
- ▪
- Gender
- ▪
- Dominant foot
2.7. Pilot Prototype
- Hardware:
- ○
- Android compatible tablet
- ○
- Movesense sensor and chest strap
- Software:
- ○
- Android Studio
- ○
- Movesense sensor’s Android libraries
- ○
- 1Balance user interface for Android devices
- ○
- IBM backend and cloud for saving the measurement data from the pilots
- Data:
- ○
- Raw data:
- ▪
- Accelerometer
- ▪
- Gyroscope
- ▪
- Magnetometer
- ○
- Calculated data
- ▪
- Subject’s sway
- Path length
- VelocitySD
- Area
- ▪
- Romberg’s quotients of the aforementioned attributes
- ○
- Subject data:
- ▪
- Age
- ▪
- Height
- ▪
- Weight
- ▪
- Gender
- ▪
- Dominant foot
- ▪
- Consent for system to store the personal information
3. Results
4. Discussion
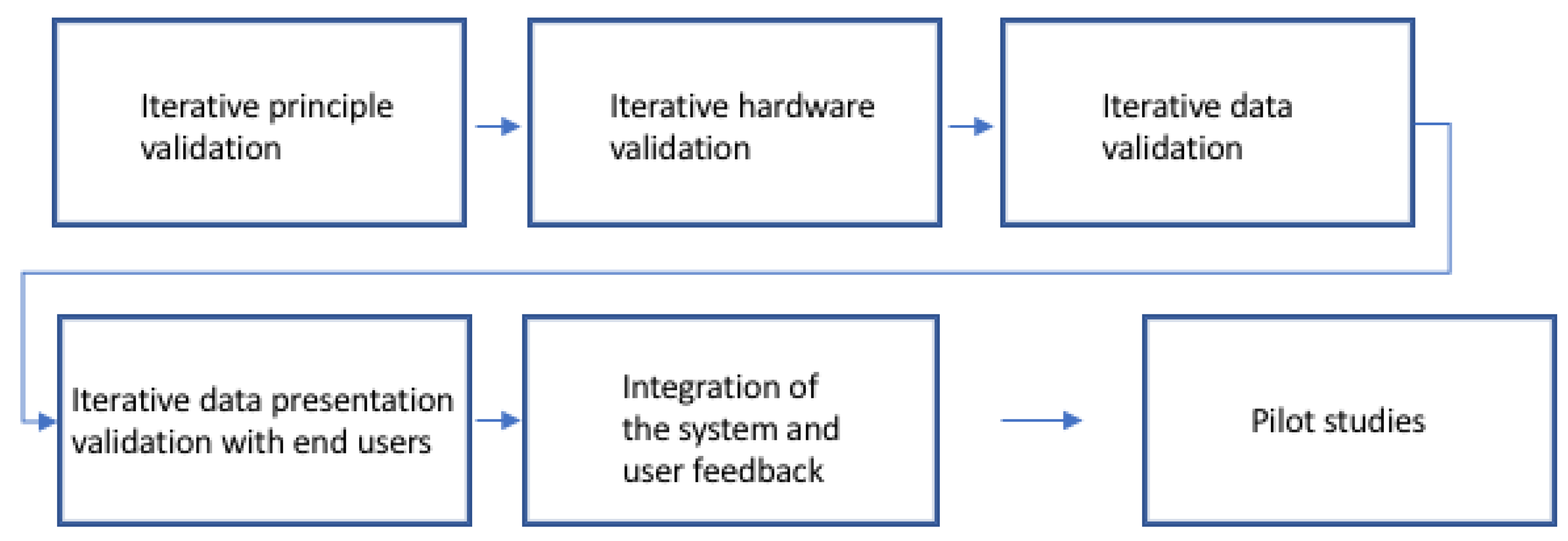
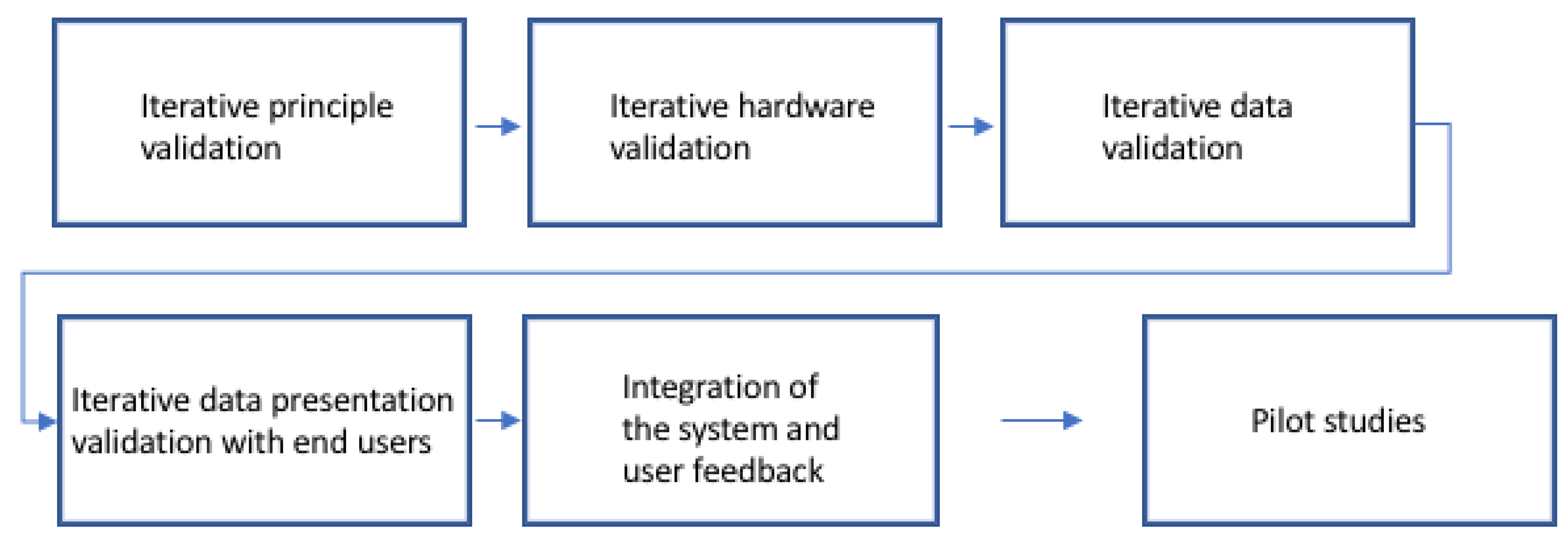
- To confirm that the technical principle is true in context.
- To confirm that the hardware and software work together, producing data as intended
- To collect data in quantities and test connectivity
- To test the physical functionality of the device and visualize the data
- To create a test setup for prototyping the pipeline from sensor values to insights
- To make a research tool for collecting data for statistical analysis and machine learning purposes
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Elverum, C.W.; Welo, T.; Steinert, M. The fuzzy front end: Concept development in the automotive industry. In ASME 2014 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference; American Society of Mechanical Engineers: New York, NY, USA, 2014. [Google Scholar]
- Reime, T.; Sjöman, H.; Gerstenberg, A.; Abrahamsson, P.; Steinert, M. Bridging tangible and virtual interaction: Rapid prototyping of a gaming idea. In International Conference on Entertainment Computing; Springer: Cham, Switzerland, 2015; pp. 523–528. [Google Scholar]
- Ibarra-Esquer, J.E.; González-Navarro, F.F.; Flores-Rios, B.L.; Burtseva, L.; Astorga-Vargas, M.A. Tracking the Evolution of the Internet of Things Concept across Different Application Domains. Sensors 2017, 17, 1379. [Google Scholar] [CrossRef] [PubMed]
- Gurley, J.M.; Hujsak, B.D.; Kelly, J.L. Vestibular rehabilitation following mild traumatic brain injury. NeuroRehabilitation 2013, 32, 519–528. [Google Scholar] [PubMed]
- Guskiewicz, K.M. Balance assessment in the management of sport-related concussion. Clin. Sports Med. 2011, 30, 89–102. [Google Scholar] [CrossRef] [PubMed]
- Murray, N.; Salvatore, A.; Powell, D.; Reed-Jones, R. Reliability and validity evidence of multiple balance assessments in athletes with a concussion. J. Athl. Train. 2014, 49, 540–549. [Google Scholar] [CrossRef] [PubMed]
- Dornan, J.; Fernie, G.R.; Holliday, P.J. Visual input: Its importance in the control of postural sway. Arch. Phys. Med. Rehabil. 1978, 59, 586–591. [Google Scholar] [PubMed]
- Morioka, S.; Okita, M.; Takata, Y.; Miyamoto, S.; Itaba, H. Effects of changes of foot position on Romberg’s quotient of postural sway and leg muscles electromyographic activities in standing. J. Jpn. Phys. Ther. Assoc. 2000, 3, 17–20. [Google Scholar] [CrossRef] [PubMed]
- Lê, T.-T.; Kapoula, Z. Role of ocular convergence in the Romberg quotient. Gait Posture 2008, 27, 493–500. [Google Scholar] [CrossRef] [PubMed]
- Kapoula, Z.; Gaertner, C.; Yang, Q.; Denise, P.; Toupet, M. Vergence and standing balance in subjects with idiopathic bilateral loss of vestibular function. PLoS ONE 2013, 8, e66652. [Google Scholar] [CrossRef] [PubMed]
- De Kegel, A.; Dhooge, I.; Cambier, D.; Baetens, T.; Palmans, T.; Van Waelvelde, H. Test–retest reliability of the assessment of postural stability in typically developing children and in hearing impaired children. Gait Posture 2011, 33, 679–685. [Google Scholar] [CrossRef] [PubMed]
- Howcroft, J.; Lemaire, E.D.; Kofman, J.; McIlroy, W.E. Elderly fall risk prediction using static posturography. PLoS ONE 2017, 12, e0172398. [Google Scholar] [CrossRef] [PubMed]
- Kalron, A. The Romberg ratio in people with multiple sclerosis. Gait Posture 2017, 54, 209–213. [Google Scholar] [CrossRef] [PubMed]
- Vartiainen, M.; Holm, A.; Koskinen, S.; Hokkanen, L. The feasibility of romberg quotient in assessment of balance after sport concussion. Br. J. Sports Med. 2017, 51, A57–A58. [Google Scholar] [CrossRef]
- Borg, F.; Laxåback, G.; Björkgren, M. Comparison of Balance and Some Other Physical Characteris-Tics between Elderly Fallers and Non-Fallers; University of Jyväskylä, Chydenius Institute: Kokkola, Finland, 2008. [Google Scholar]
- Eisenhardt, K.M.; Graebner, M.E. Theory building from cases: Opportunities and challenges. Acad. Manag. J. 2007, 50, 25–32. [Google Scholar] [CrossRef]
- Ottosson, S. Participation action research-: A key to improved knowledge of management. Technovation 2003, 23, 87–94. [Google Scholar] [CrossRef]
- Gerstenberg, A.; Sjöman, H.; Reime, T.; Abrahamsson, P.; Steinert, M. A Simultaneous, Multidisciplinary Development and Design Journey–Reflections on Prototyping. In International Conference on Entertainment Computing; Springer: Cham, Switzerland, 2015; pp. 409–416. [Google Scholar]
- Amer Sports. Available online: https://www.amersports.com/ (accessed on 14 April 2018).
- Suunto. Available online: https://www.amersports.com/brand/suunto/ (accessed on 14 April 2018).
- Movesense. Available online: https://www.movesense.com/ (accessed on 13 April 2018).
- Thong, Y.K.; Woolfson, M.S.; Crowe, J.A.; Hayes-Gill, B.R.; Challis, R.E. Dependence of inertial measurements of distance on accelerometer noise. Meas. Sci. Technol. 2002, 13, 1163. [Google Scholar] [CrossRef]
- CES—The Global Stage for Innovation—CES 2018. Available online: https://www.ces.tech/ (accessed on 13 April 2018).
- Madgwick, S.O.; Harrison, A.J.; Vaidyanathan, R. Estimation of IMU and MARG orientation using a gradient descent algorithm. In Proceedings of the 2011 IEEE International Conference on Rehabilitation Robotics (ICORR), Zurich, Switzerland, 27 June–1 July 2011; pp. 1–7. [Google Scholar]
- Data Protection in the EU. European Commission. Available online: https://ec.europa.eu/info/law/law-topic/data-protection/data-protection-eu_en (accessed on 13 April 2018).


© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sjöman, H.; Kalasniemi, J.; Vartiainen, M.; Steinert, M. The Development of 1Balance: A Connected Medical Device for Measuring Human Balance. Technologies 2018, 6, 53. https://doi.org/10.3390/technologies6020053
Sjöman H, Kalasniemi J, Vartiainen M, Steinert M. The Development of 1Balance: A Connected Medical Device for Measuring Human Balance. Technologies. 2018; 6(2):53. https://doi.org/10.3390/technologies6020053
Chicago/Turabian StyleSjöman, Heikki, Jani Kalasniemi, Matti Vartiainen, and Martin Steinert. 2018. "The Development of 1Balance: A Connected Medical Device for Measuring Human Balance" Technologies 6, no. 2: 53. https://doi.org/10.3390/technologies6020053
APA StyleSjöman, H., Kalasniemi, J., Vartiainen, M., & Steinert, M. (2018). The Development of 1Balance: A Connected Medical Device for Measuring Human Balance. Technologies, 6(2), 53. https://doi.org/10.3390/technologies6020053