



Maze Solving Mobile Robot Based on Image Processing and Graph Theory

 , , and
, , and
Abstract
:1. Introduction
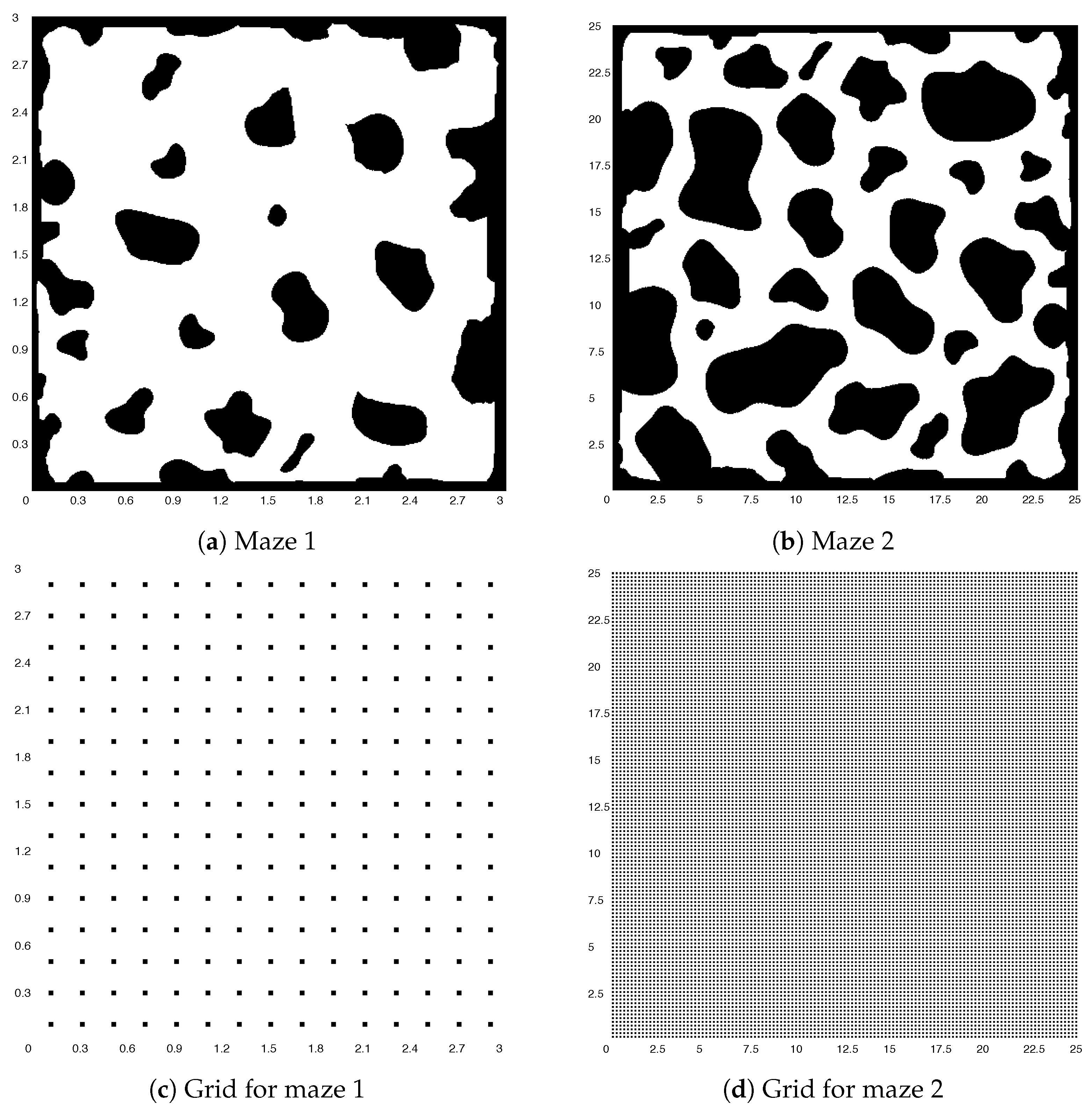
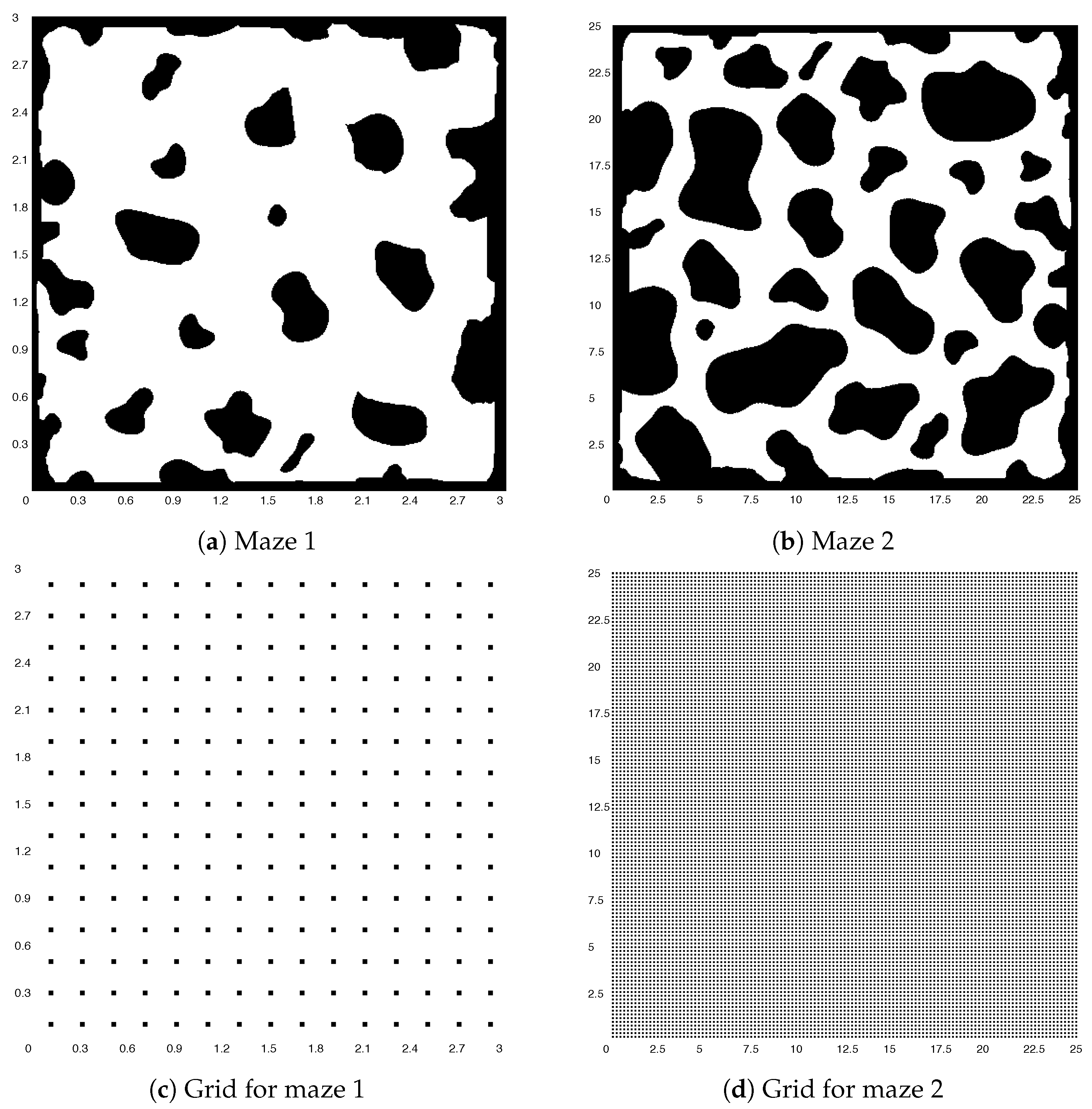
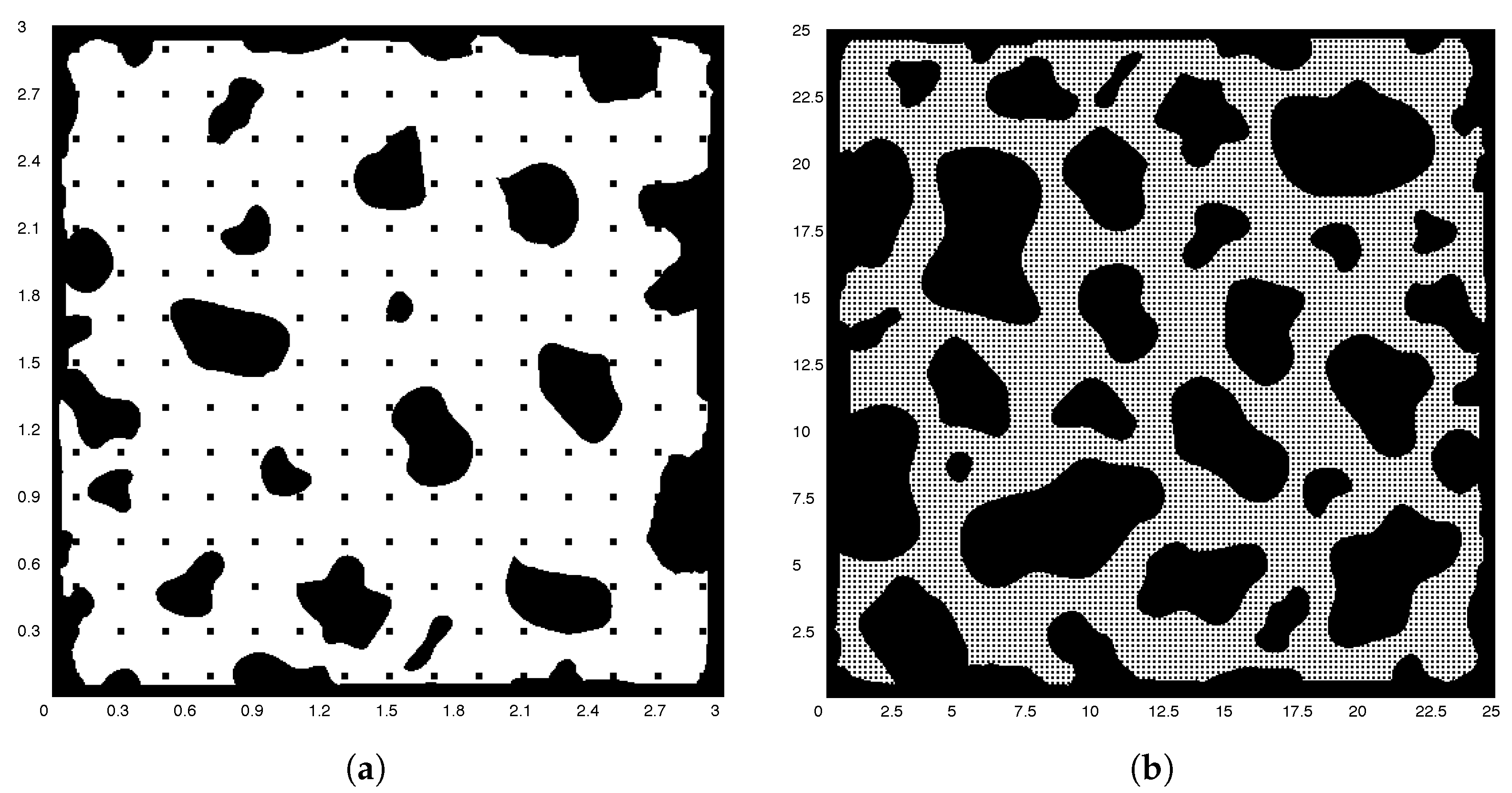
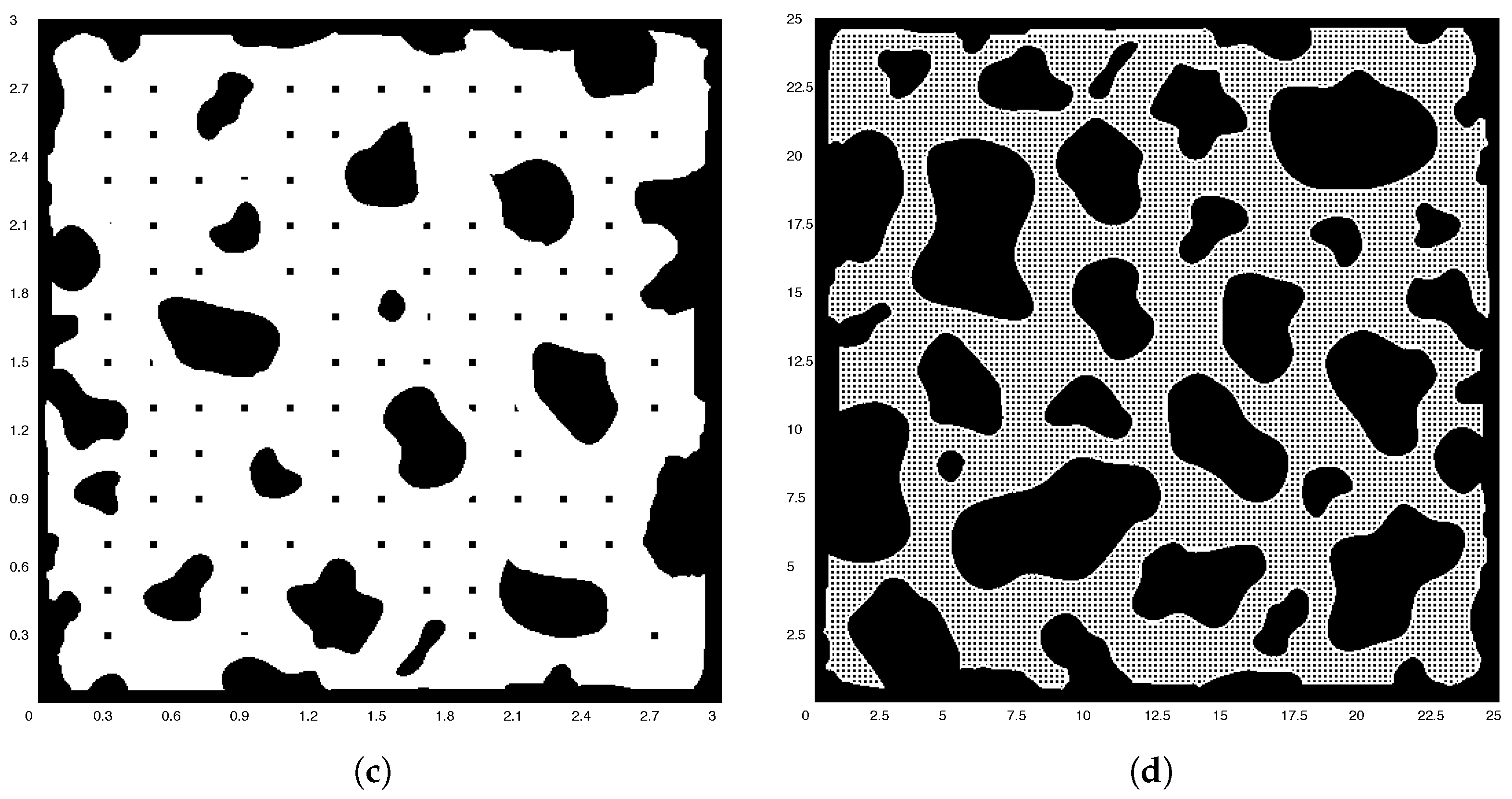
2. Maze-Image Processing
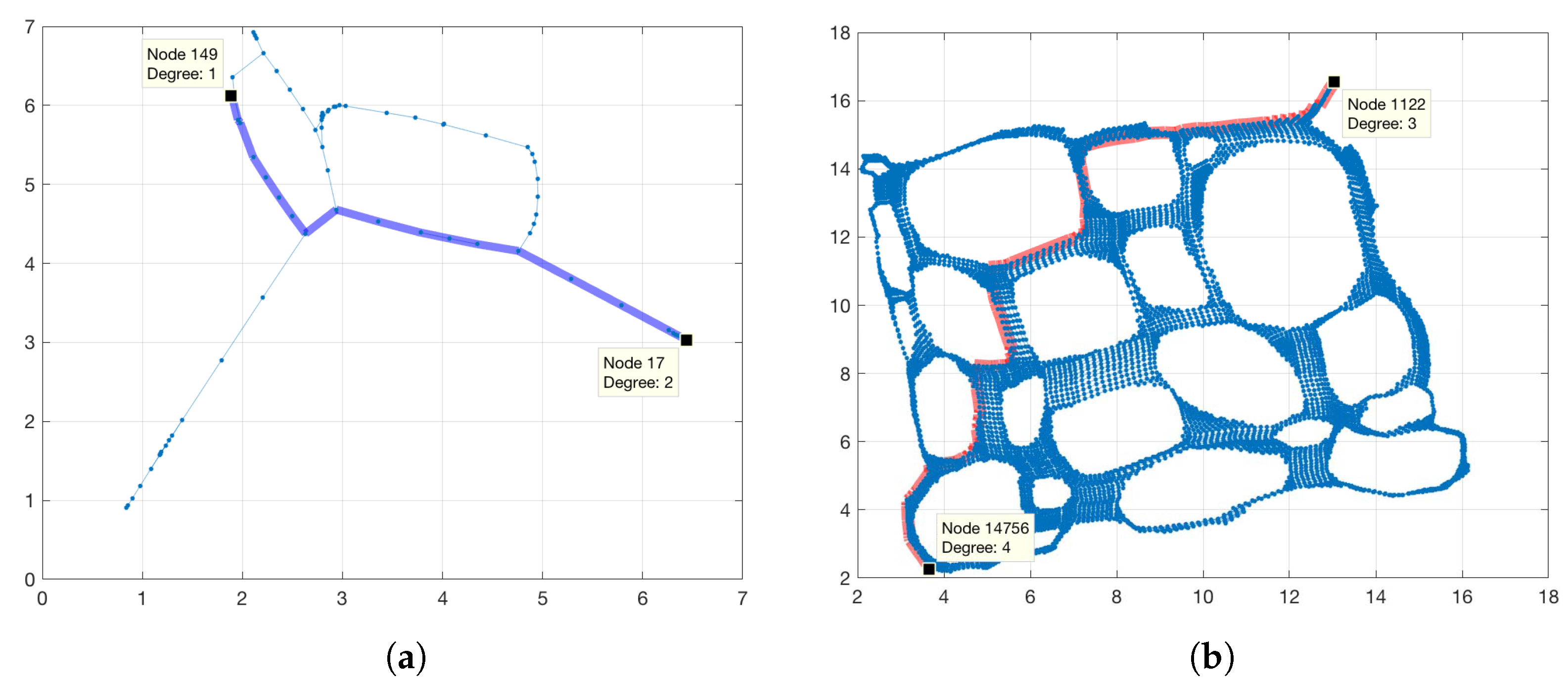
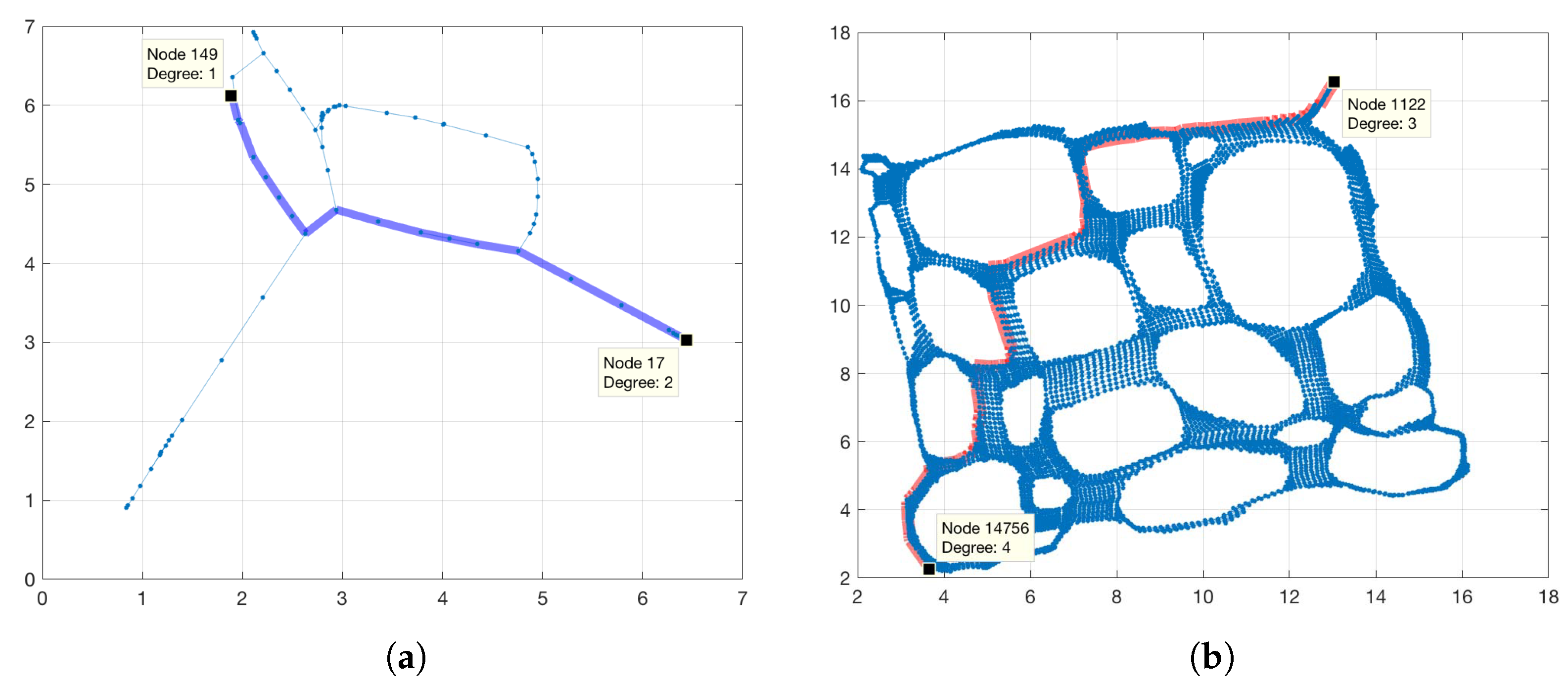
3. Path Planning

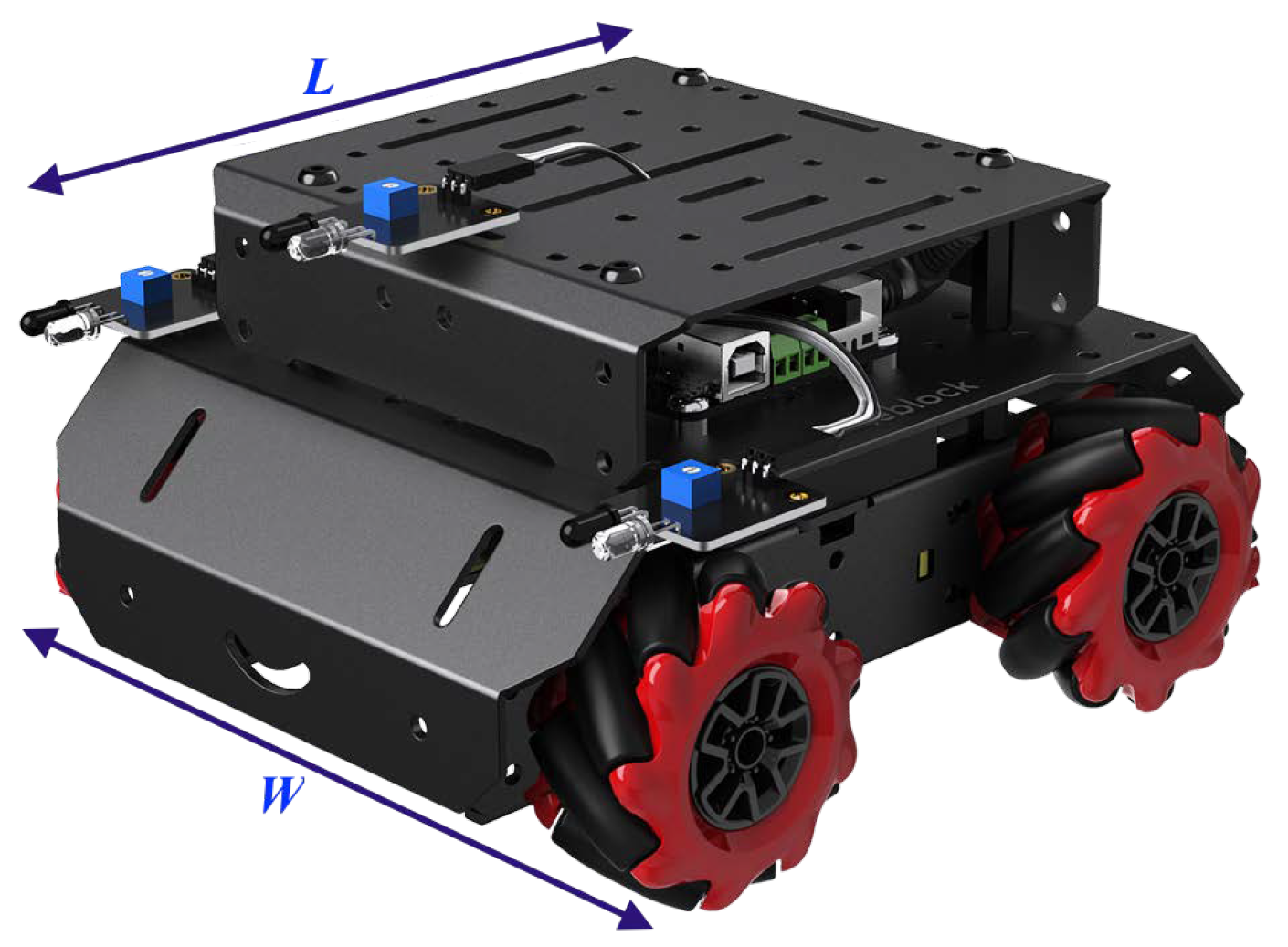
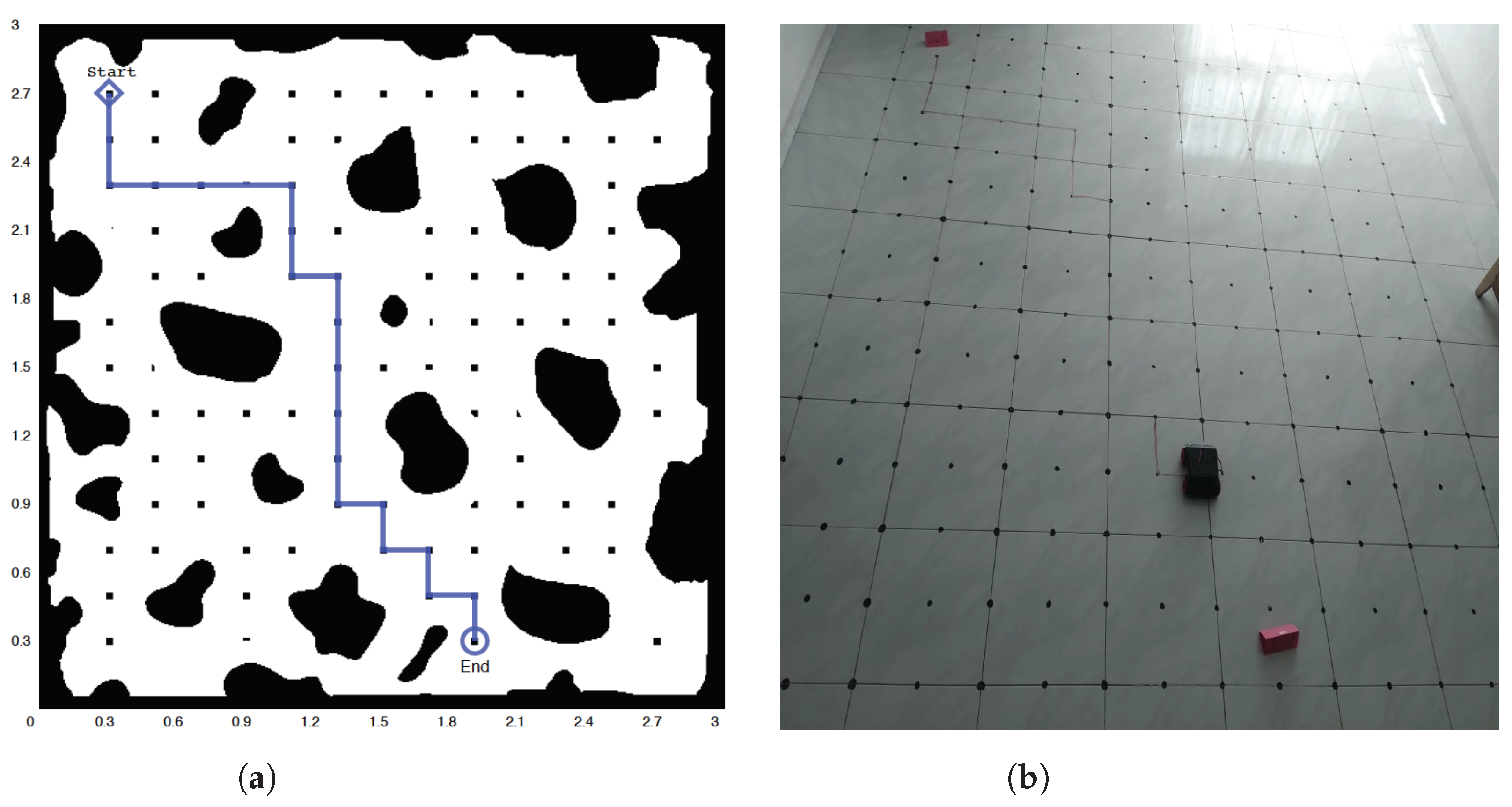
4. Experimental Verification
| Algorithm 1 Instruction transformation algorithm pseudocode. |
Require: Path vector
|
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gross, J.L.; Yellen, J.; Anderson, M. Graph Theory and Its Applications, 3rd ed.; CRC Press: Boca Raton, FL, USA; Taylos & Francis Group: Boca Raton, FL, USA, 2019. [Google Scholar]
- Sadik, A.M.J.; Dhali, M.A.; Farid, H.M.A.B.; Rashid, T.U.; Syeed, A. A Comprehensive and Comparative Study of Maze-Solving Techniques by Implementing Graph Theory. In Proceedings of the International Conference on Artificial Intelligence and Computational Intelligence, Sanya, China, 23–24 October 2010; pp. 52–56. [Google Scholar]
- Kumar, N.; Kaur, S. A Review of Various Maze Solving Algorithms Based on Graph Theory. Int. J. Sci. Res. Dev. 2019, 6, 431–434. [Google Scholar]
- Niemczyk, R.; Zawiślak, S. Review of Maze Solving Algorithms for 2D Maze and Their Visualisation. In Engineer of the XXI Century. EngineerXXI 2018. Mechanisms and Machine Science; Zawiślak, S., Rysiński, J., Eds.; Springer: Cham, Switzerland, 2020; Volume 70. [Google Scholar]
- Alamri, S.; Alshehri, S.; Alshehri, W.; Alamri, H.; Alaklabi, A.; Alhmiedat, T. Autonomous Maze Solving Robotics: Algorithms and Systems. Int. J. Mech. Eng. Robot. Res. 2021, 10, 668–675. [Google Scholar] [CrossRef]
- Alamri, S.; Alamri, H.; Alshehri, W.; Alshehri, S.; Alaklabi, A.; Alhmiedat, T. An autonomous maze-solving robotic system based on an enhanced wall-follower approach. Machines 2023, 11, 249. [Google Scholar] [CrossRef]
- Liu, L.; Wang, X.; Yang, X.; Liu, H.; Li, J.; Wang, P. Path planning techniques for mobile robots: Review and prospect. Expert Syst. Appl. 2023, 227, 120254. [Google Scholar] [CrossRef]
- Zang, X.; Iqbal, S.; Zhu, Y.; Liu, X.; Zhao, J. Applications of chaotic dynamics in robotics. Int. J. Adv. Robot. Syst. 2016, 13. [Google Scholar] [CrossRef]
- Martyushev, N.V.; Malozyomov, B.V.; Sorokova, S.N.; Efremenkov, E.A.; Valuev, D.V.; Qi, M. Review Models and Methods for Determining and Predicting the Reliability of Technical Systems and Transport. Mathematics 2023, 11, 3317. [Google Scholar] [CrossRef]
- Liu, X.; Gong, D. A comparative study of A-star algorithms for search and rescue in perfect maze. In Proceedings of the International Conference on Electric Information and Control Engineering, Wuhan, China, 15–17 April 2011; pp. 24–27. [Google Scholar]
- Huh, D.J.; Park, J.H.; Huh, U.Y.; Kim, H.I. Path planning and navigation for autonomous mobile robot. In Proceedings of the 28th Annual Conference of the Industrial Electronics Society. IECON 02, Seville, Spain, 5–8 November 2002; Volume 2, pp. 1538–1542. [Google Scholar]
- Rahnama, B.; Ozdemir, M.; Kiran, Y.; Elci, A. Design and Implementation of a Novel Weighted Shortest Path Algorithm for Maze Solving Robots. In Proceedings of the 37th International Computer Software and Applications Conference Workshops (COMPSACW), Tokyo, Japan, 22–26 July 2013; pp. 328–332. [Google Scholar]
- Chang, K.-C.; Zhou, Y.; Shoaib, A.M.; Chu, K.-C.; Izhar, M.; Ullah, S.; Lin, Y.-C. Shortest Distance Maze Solving Robot. In Proceedings of the 2020 IEEE International Conference on Artificial Intelligence and Information Systems (ICAIIS), Dalian, China, 20–22 March 2020; pp. 283–286. [Google Scholar]
- Covaci, R.; Harja, G.; Nascu, I. Autonomous Maze Solving Robot. In Proceedings of the 2020 IEEE International Conference on Automation, Quality and Testing, Robotics (AQTR), Cluj-Napoca, Romania, 21–23 May 2020; pp. 1–4. [Google Scholar]
- Pame, Y.G.; Kottawar, V.G.; Mahajan, Y.V. A Novel Approach to Maze Solving Algorithm. In Proceedings of the 2023 International Conference on Emerging Smart Computing and Informatics (ESCI), Pune, India, 1–3 March 2023; pp. 1–6. [Google Scholar]
- Rahnama, B.; Elçi, A.; Metani, S. An Image Processing Approach to Solve Labyrinth Discovery Robotics Problem. In Proceedings of the 36th Annual Computer Software and Applications Conference Workshops, Izmir, Turkey, 16–20 July 2012; pp. 631–636. [Google Scholar]
- Joshi, H.N.; Shinde, J.P. An Image Based Path Planning And Motion Planning for Autonomous Robot. Int. J. Comput. Sci. Inf. Technol. 2014, 5, 4844–4847. [Google Scholar]
- Aqel, M.O.A.; Issa, A.; Khdair, M.; ElHabbash, M.; AbuBaker, M.; Massoud, M. Intelligent Maze Solving Robot Based on Image Processing and Graph Theory Algorithms. In Proceedings of the 2017 International Conference on Promising Electronic Technologies (ICPET), Deir El-Balah, Palestine, 16–17 October 2017; pp. 48–53. [Google Scholar]
- Murata, Y.; Mitani, Y. A Fast and Shorter Path Finding Method for Maze Images by Image Processing Techniques and Graph Theory. J. Image Graph. 2014, 2, 89–93. [Google Scholar] [CrossRef]
- Kathe, O.; Turkar, V.; Jagtap, A.; Gidaye, G. Maze solving robot using image processing. In Proceedings of the Bombay Section Symposium (IBSS), Mumbai, India, 10–11 September 2015; pp. 1–5. [Google Scholar]
- Ambeskar, A.; Turkar, V.; Bondre, A.; Gosavi, H. Path finding robot using image processing. In Proceedings of the 2016 International Conference on Inventive Computation Technologies (ICICT), Coimbatore, India, 26–27 August 2016; pp. 1–6. [Google Scholar]
- Ambeskar, A.; Bondre, A.; Turkar, V.; Gosavi, H. Intuitive solution for Robot Maze Problem using Image Processing. In Proceedings of the Bombay Section Signature Conference (IBSSC), Mumbai, India, 26–28 July 2019; pp. 1–6. [Google Scholar]
- Althöfer, K.; Fraser, D.A.; Bugmann, G. Rapid path planning for robotic manipulators using an emulated resistive grid. Electron. Lett. 1995, 31, 1960–1961. [Google Scholar] [CrossRef]
- Hernández-Mejía, C.; Vázquez-Leal, H.; Sánchez-González, A.; Corona-Avelizapa, A. A Novel and Reduced CPU Time Modeling and Simulation Methodology for Path Planning Based on Resistive Grids. Arab. J. Sci. Eng. 2019, 44, 2321–2333. [Google Scholar] [CrossRef]
- Hernández-Mejía, C.; Torres-Muñoz, D.; Inzunza-González, E.; Sánchez-López, C. Exploring Robotical Implementation for Planning of Collision-free Logistical Paths Using RGPPM Algorithm. Iran. J. Sci. Technol. Trans. Electr. Eng. 2023, 47, 221–231. [Google Scholar] [CrossRef]
- Pershin, Y.V.; Di Ventra, M. Solving mazes with memristors: A massively parallel approach. Phys. Rev. E 2011, 84, 046703. [Google Scholar] [CrossRef] [PubMed]
- Sarmiento-Reyes, A.; Rodríguez-Velásquez, Y. Maze-solving with a memristive grid of charge-controlled memristors. In Proceedings of the 9th Latin American Symposium on Circuits & Systems (LASCAS), Puerto Vallarta, Mexico, 25–28 February 2018; pp. 1–4. [Google Scholar]
- Brown, S.; Pyke, D.; Steenhof, P. Electric vehicles: The role and importance of standards in an emerging market. Energy Policy 2010, 28, 3797–3806. [Google Scholar] [CrossRef]
- Makeblock mBot Mega. Available online: https://www.makeblock.com/pages/mbot-mega-smart-remote-control-robot (accessed on 24 September 2023).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Shortest Path | Processing Time (sec) | Travel Time (sec) | Distance (m) | Battery Consumption (%) |
|---|---|---|---|---|
| Figure 3a | 1.41 | 7.88 | 4.2 | 0.43 |
| Figure 3b | 2.15 | 89.75 | 46.6 | - |
| Reference | Basic Algorithm | Maze Size | Robot Size | Scaling Property | Experimental Verification |
|---|---|---|---|---|---|
| [16] | Wall detection | Medium | N | N | N |
| [17] | A-start | Small | N | N | Y |
| [18] | Breadth-First Search | Small | N | N | Y |
| [19] | A-start | Large | N | N | N |
| [20] | Direction Envelope | Small | N | N | N |
| [21] | Direction Envelope | Small | N | N | Y |
| [22] | Modified Direction Envelope | Small | N | N | N |
| This work | Breadth-First Search | Very Large | Y | Y | Y |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Avila-Sánchez, L.A.; Sánchez-López, C.; Ochoa-Montiel, R.; Montalvo-Galicia, F.; Sánchez-Gaspariano, L.A.; Hernández-Mejía, C.; González-Hernández, H.G. Maze Solving Mobile Robot Based on Image Processing and Graph Theory. Technologies 2023, 11, 171. https://doi.org/10.3390/technologies11060171
Avila-Sánchez LA, Sánchez-López C, Ochoa-Montiel R, Montalvo-Galicia F, Sánchez-Gaspariano LA, Hernández-Mejía C, González-Hernández HG. Maze Solving Mobile Robot Based on Image Processing and Graph Theory. Technologies. 2023; 11(6):171. https://doi.org/10.3390/technologies11060171
Chicago/Turabian StyleAvila-Sánchez, Luis A., Carlos Sánchez-López, Rocío Ochoa-Montiel, Fredy Montalvo-Galicia, Luis A. Sánchez-Gaspariano, Carlos Hernández-Mejía, and Hugo G. González-Hernández. 2023. "Maze Solving Mobile Robot Based on Image Processing and Graph Theory" Technologies 11, no. 6: 171. https://doi.org/10.3390/technologies11060171
APA StyleAvila-Sánchez, L. A., Sánchez-López, C., Ochoa-Montiel, R., Montalvo-Galicia, F., Sánchez-Gaspariano, L. A., Hernández-Mejía, C., & González-Hernández, H. G. (2023). Maze Solving Mobile Robot Based on Image Processing and Graph Theory. Technologies, 11(6), 171. https://doi.org/10.3390/technologies11060171