





Application of G.hn Broadband Powerline Communication for Industrial Control Using COTS Components


Abstract
:
1. Introduction
Contributions of This Paper
2. Related Work and Research Questions
Goal of the Presented Research
3. Materials and Methods
3.1. G.hn Technology
3.1.1. Physical Layer

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | Powerline | Telephone Line | Coax |
|---|---|---|---|
| Modulation | OFDM | ||
| Modulation order | BPSK to 4096-QAM (1 to 12 Bit/symbol, variable per subcarrier) | ||
| Spectrum (used) | 2–100 MHz (2–80 MHz) | 2–200 MHz | 5–200 MHz |
| Subcarrier spacing | 24.4 kHz | 48.8 kHz | 195.3 kHz |
| MIMO support | Yes | Yes (for bonded lines) | No |
| Forward error correction (FEC) | LDPC, rate 1/2, 2/3, 5/6, 16/18, 20/21 | ||
| Encryption | AES-256 | ||
| Theoretical max data rate (PHY/MAC) | 1500/1000 Mbit/s | 4000/3400 Mbit/s | 2000/1700 Mbit/s |
| Automatic repeat request (ARQ) | Yes | ||
| Medium Access | TDMA; coordinated by a domain master (DM) | ||
| QoS (in end nodes) | 8 levels | ||
3.1.2. Medium Access
3.2. COTS Components Used
3.2.1. Number of Nodes in a G.hn Domain with Direct Communication
3.2.2. Implemented MAC Algorithms
3.2.3. Independence from AC Power
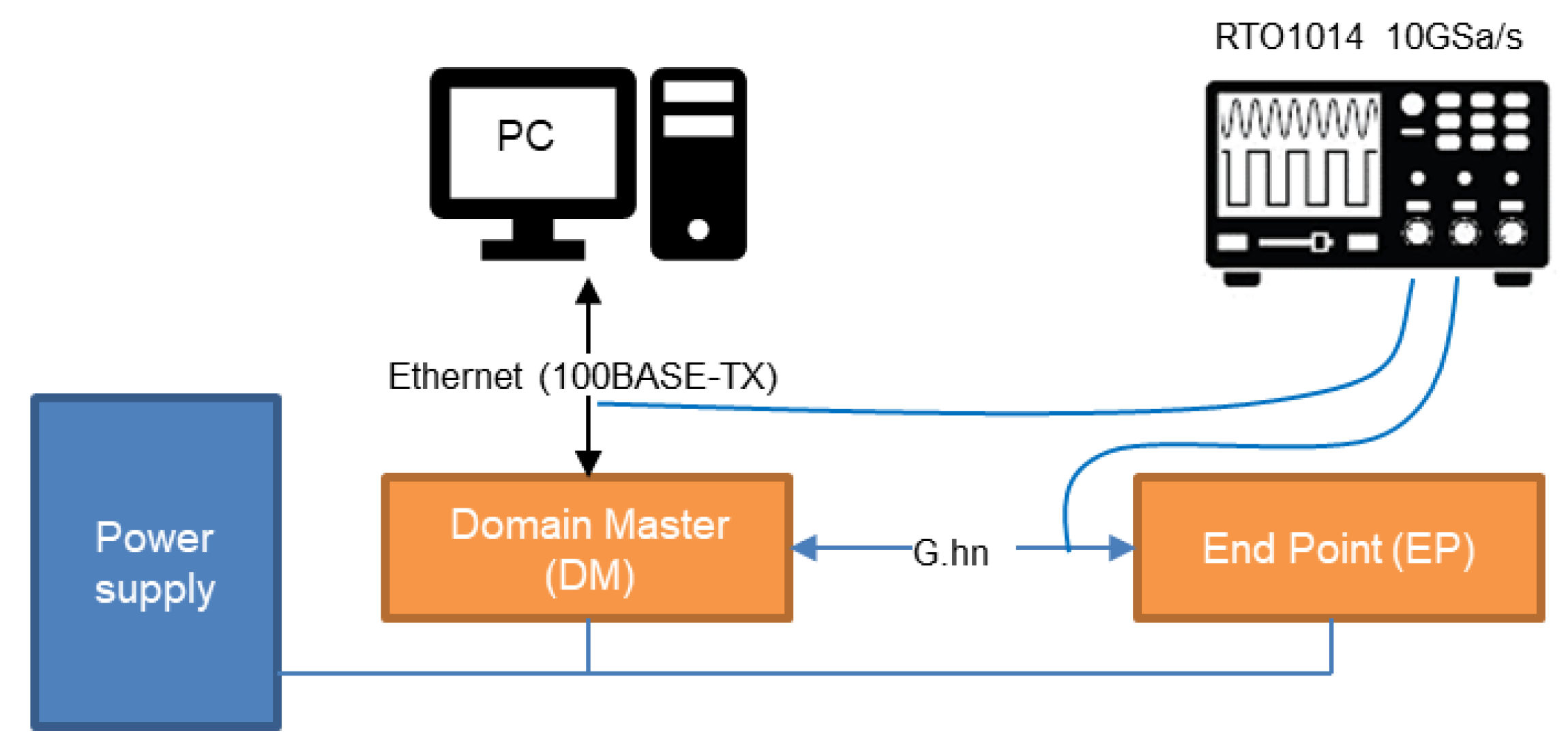
3.3. Evaluation Methods
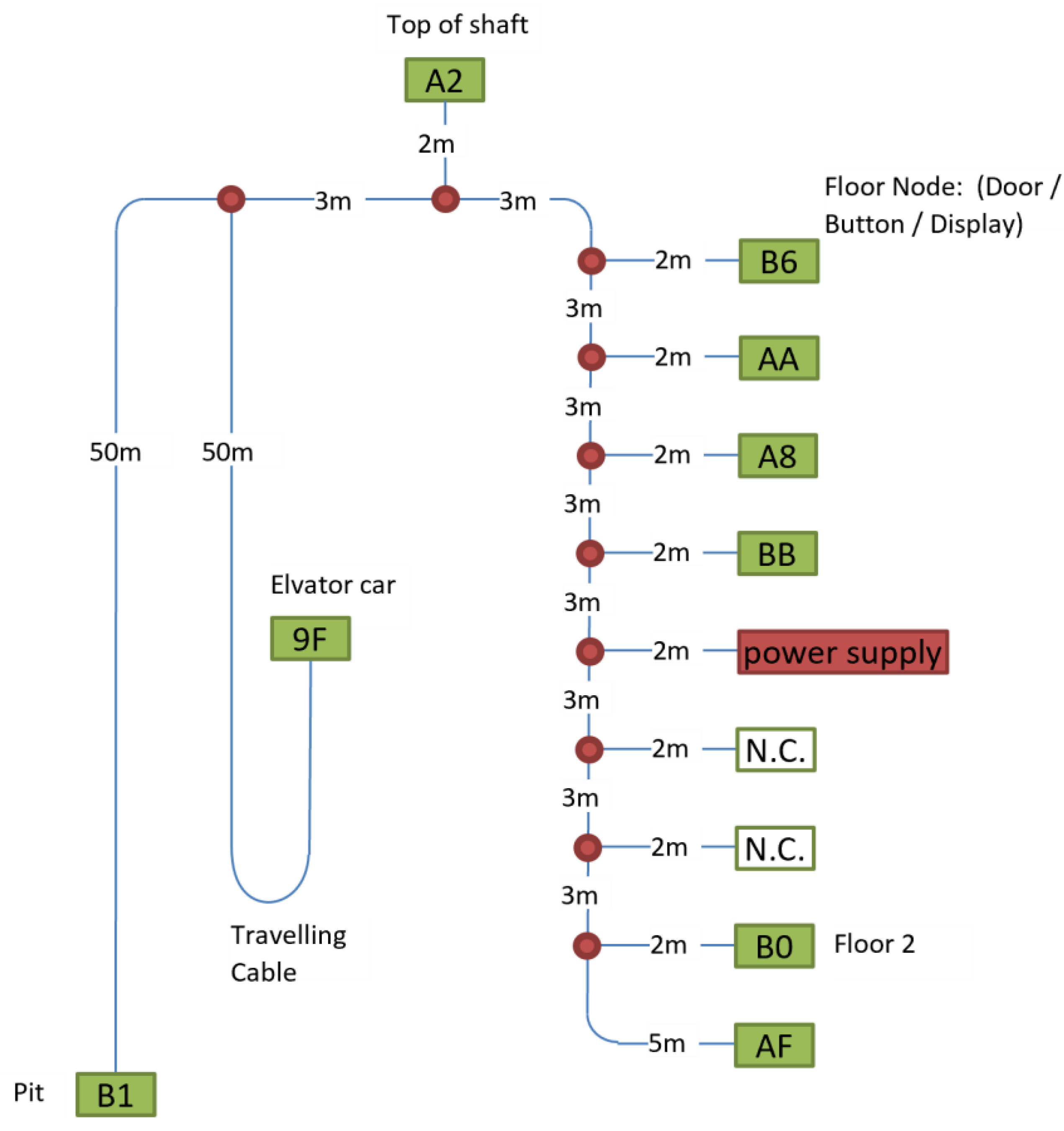
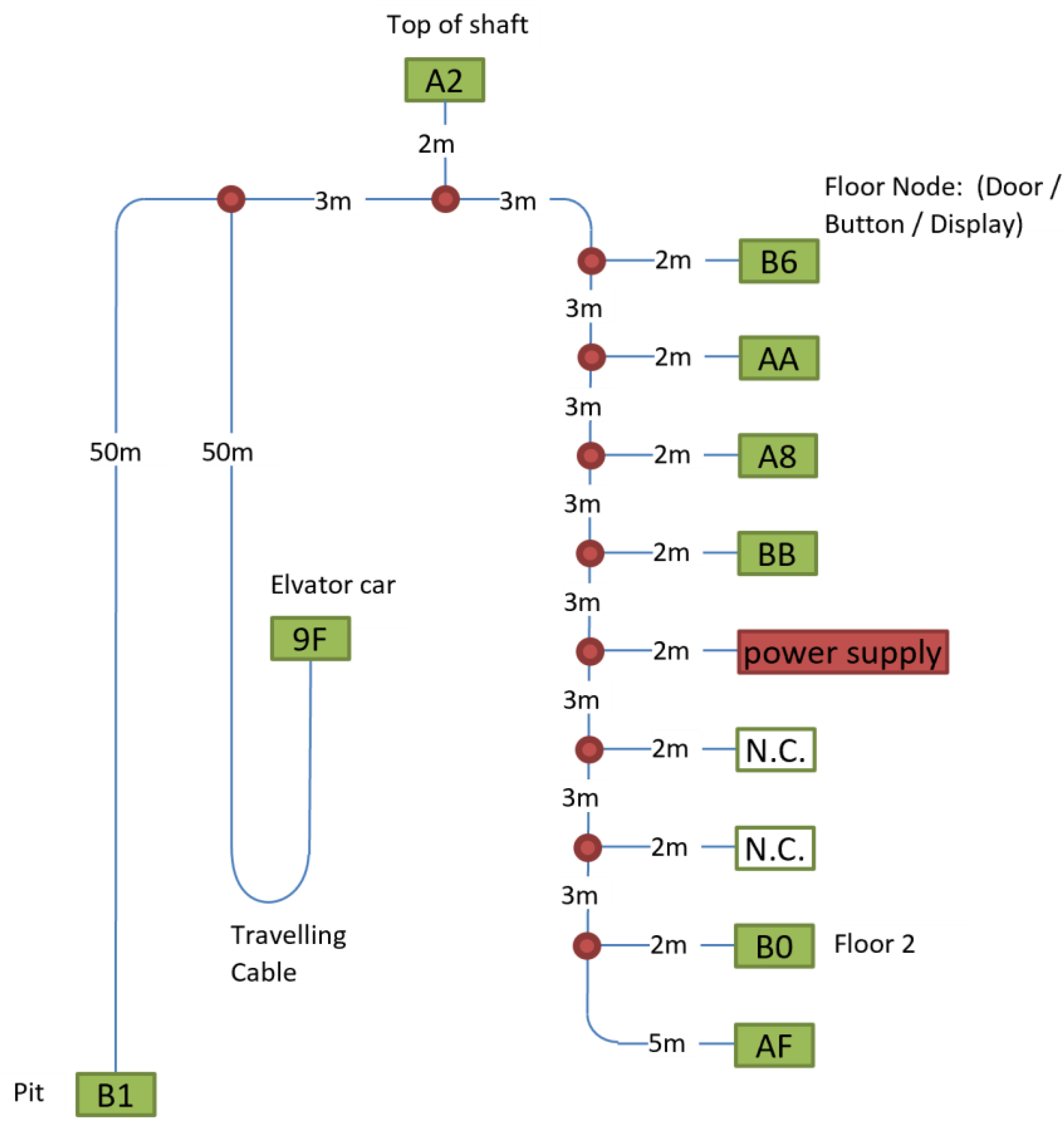
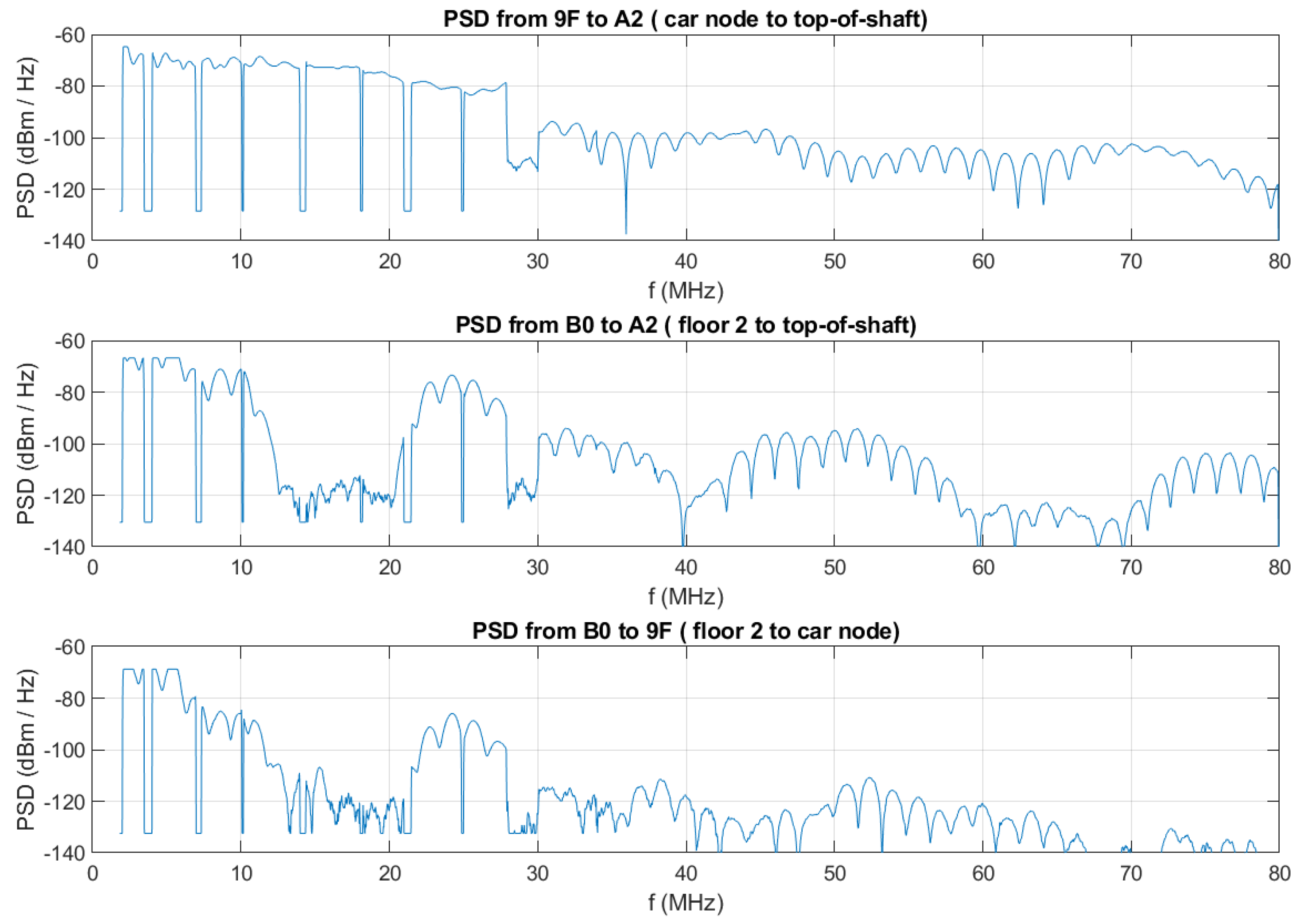
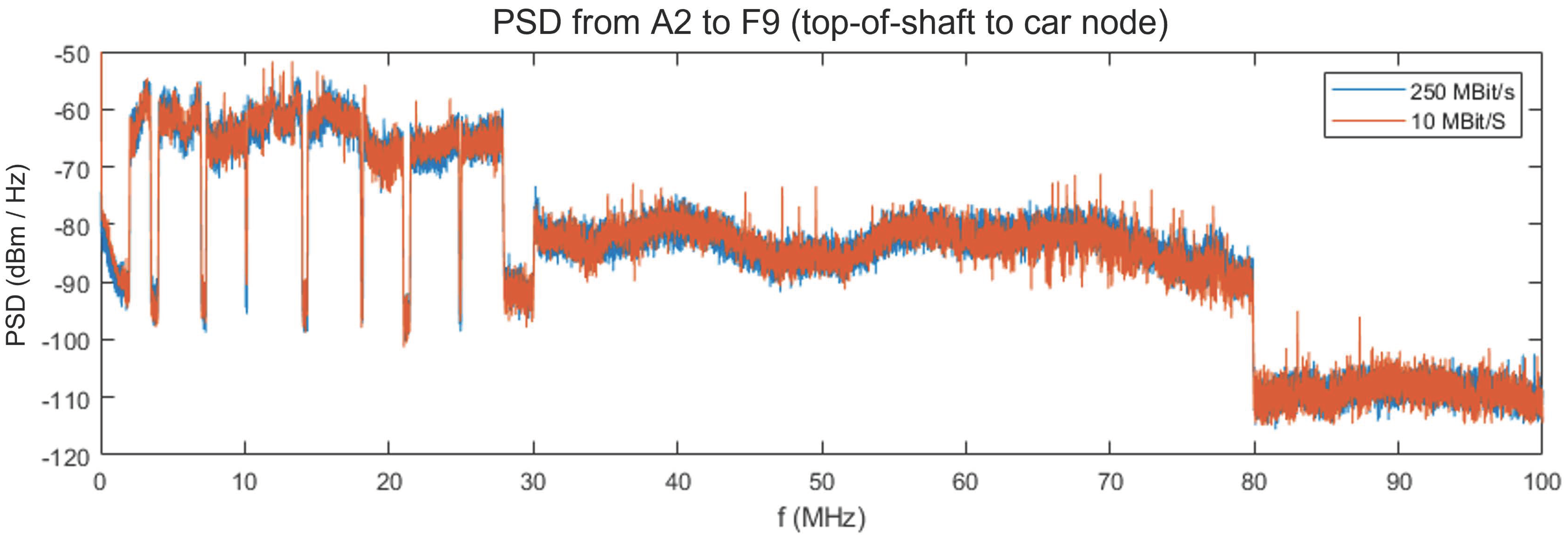
3.3.1. Channel Transfer Function
- All cables were unshielded twisted pair cables, excluding the traveling cable, which was straight.
- Due to the armored concrete in the lab premises, the traveling cable was placed on a wooden construction to have minimum coupling effects.
- All cables were placed within 1 m of each other. This was also applied for both sides of the U-turn in the traveling cable on the wooden construction.
- All T-connectors were simple connectors that generated reflections.
3.3.2. Packet Rate
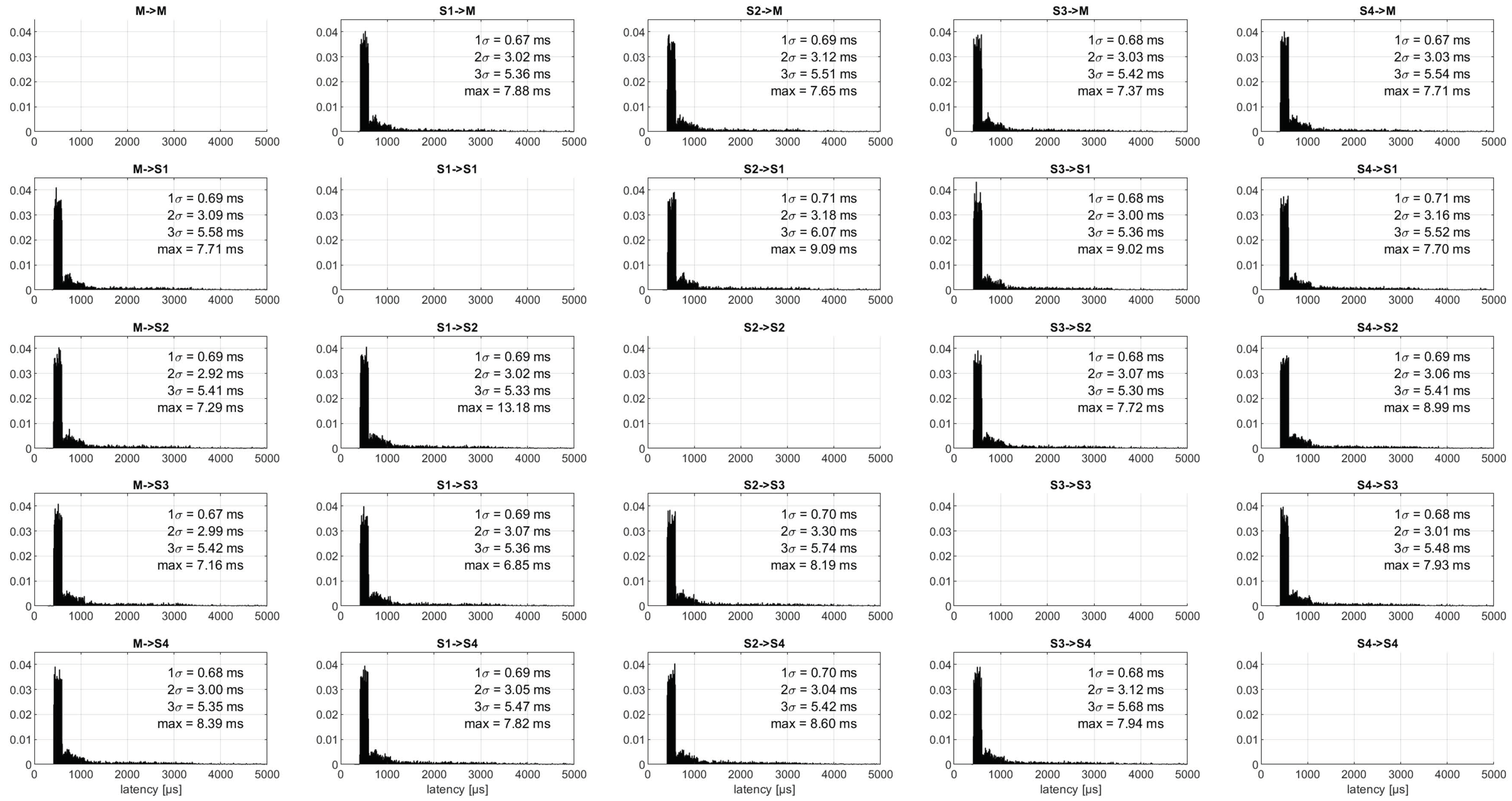
3.3.3. Latency Measurements
- (A)
- Measurement System
- The system uses PC Engines’ apu2e4 single-board computers [22] as traffic generators and logging nodes. The APUs (accelerated processing units) have a quad-core 64-bit processor with 4 GB RAM and 3 Intel i210AT network controllers with hardware timestamping.
- The central test controller (CTC), a Linux PC, controls all APUs, which generate Ethernet packets according to predefined traffic patterns. The patterns define source and destination addresses, packet size, and the packet rate (with a certain randomization) of frames sent through the frontend system.
- All APUs are synchronized to the master clock within ± 1 μs using IEEE 802.1AS-2020, the TSN time synchronization protocol.
- APUs log timestamps of outgoing and incoming messages on port P1 facing the modem. The log files are sent to the CTC at the end of the test.
- CTC combines the log files with outgoing and incoming timestamps into a database accessible by the analysis software
- (B)
- Traffic patterns
- (C)
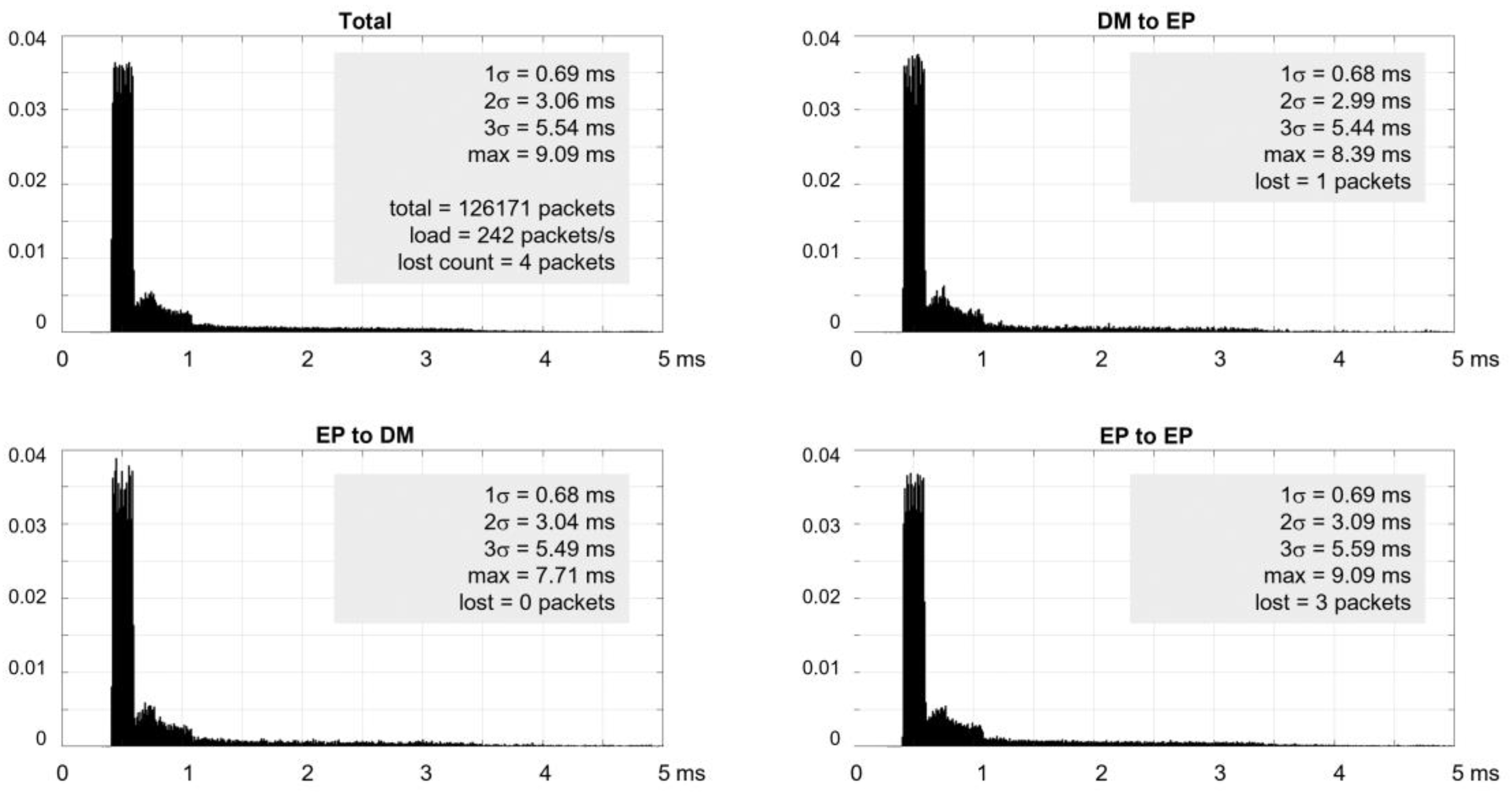
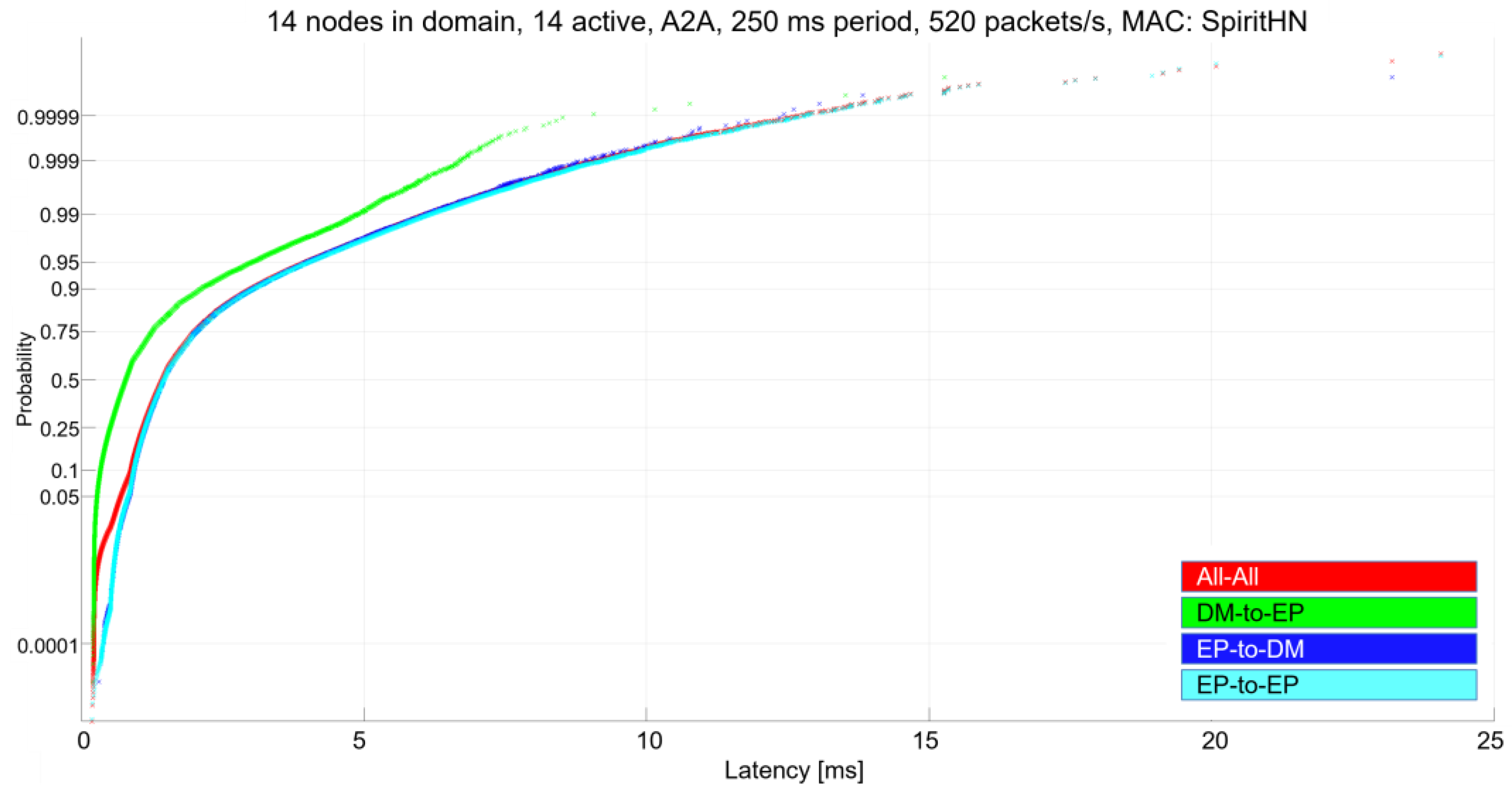
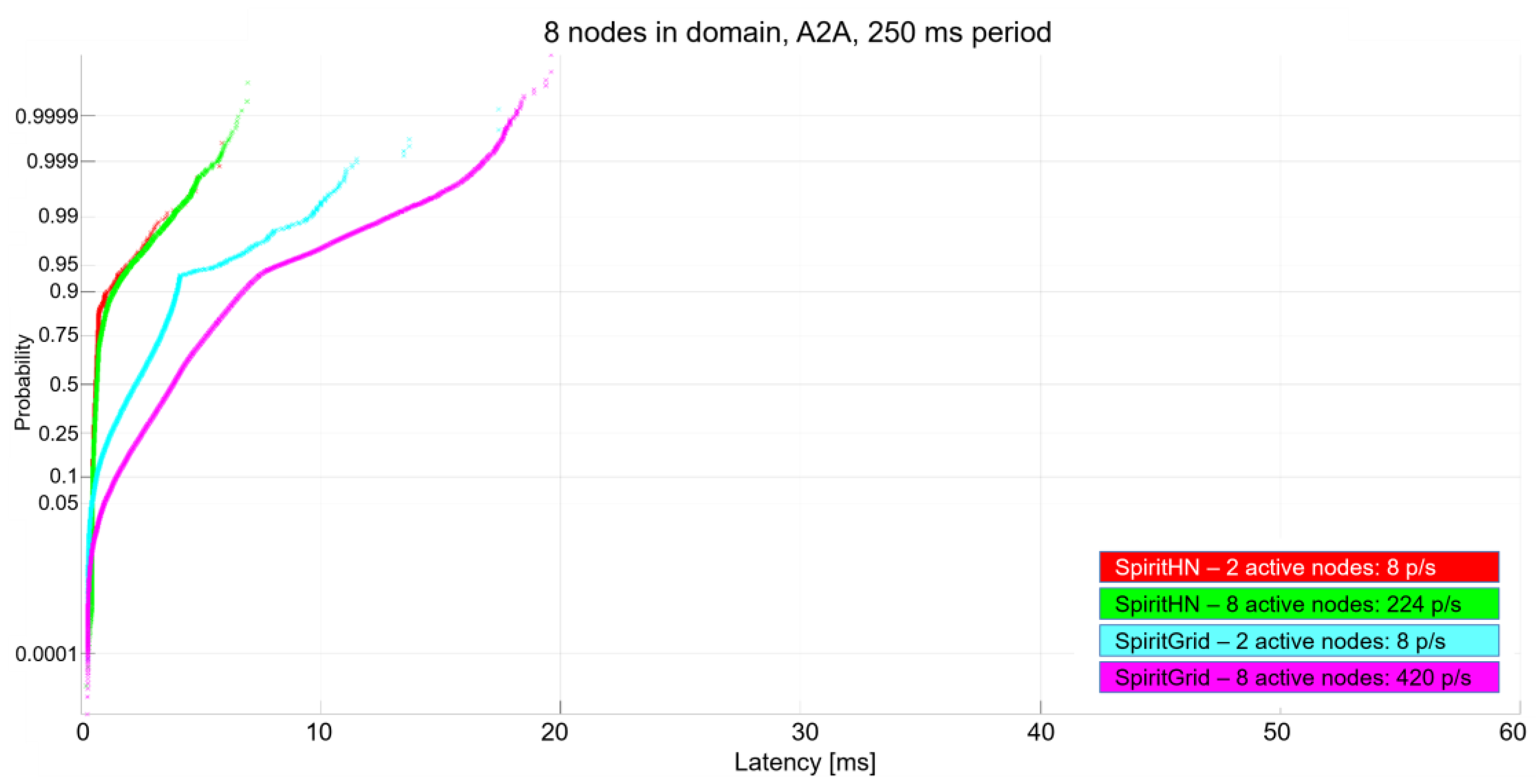
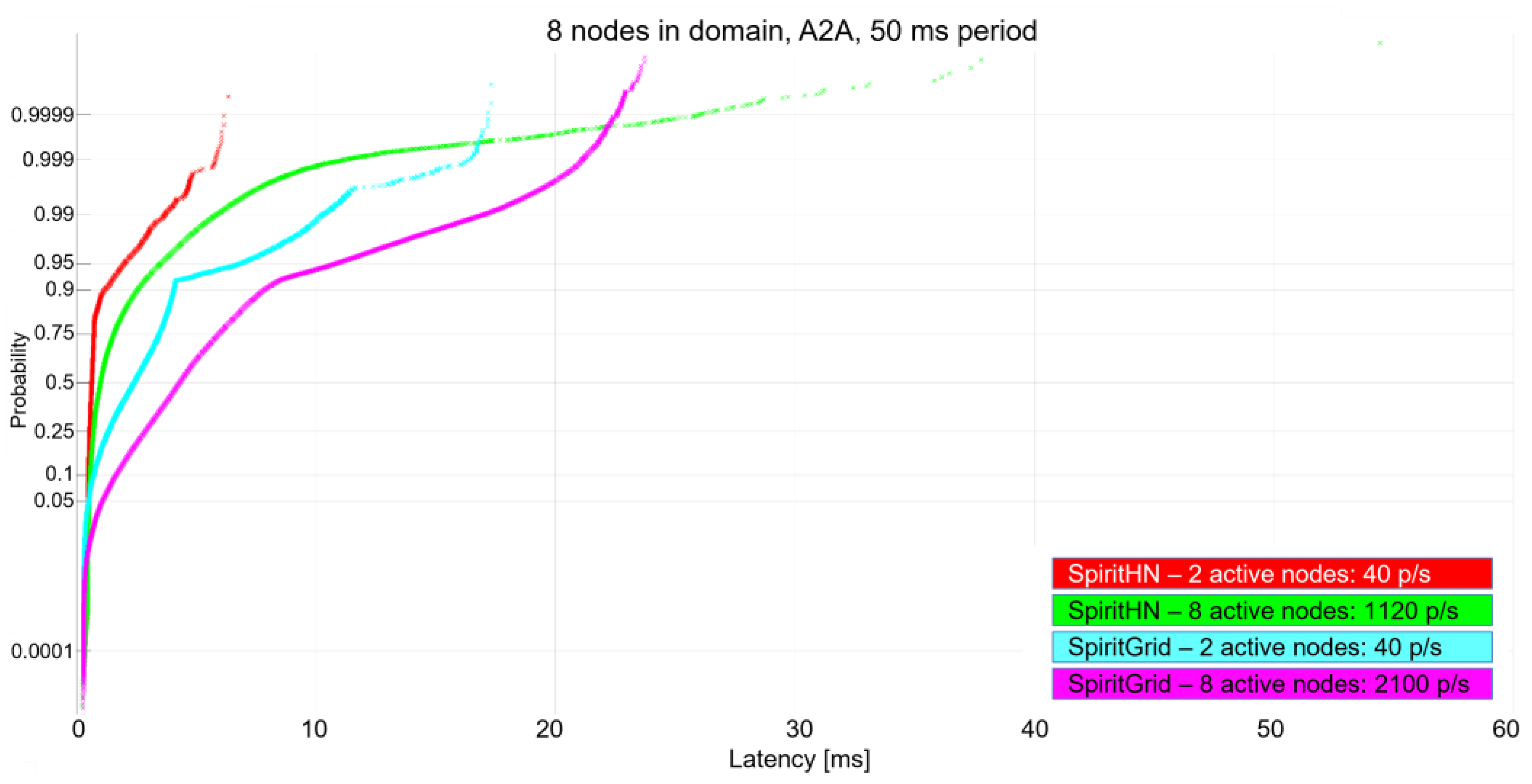
- Presentation of the latency measurement results
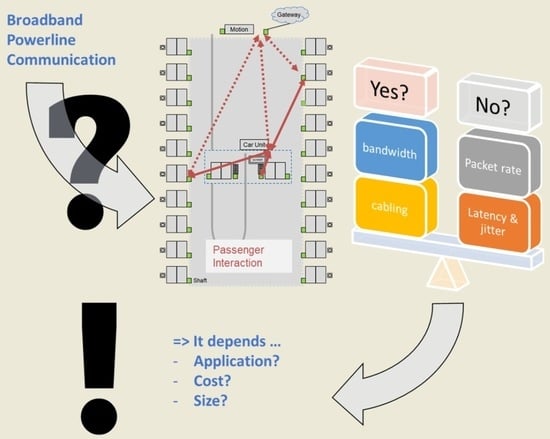
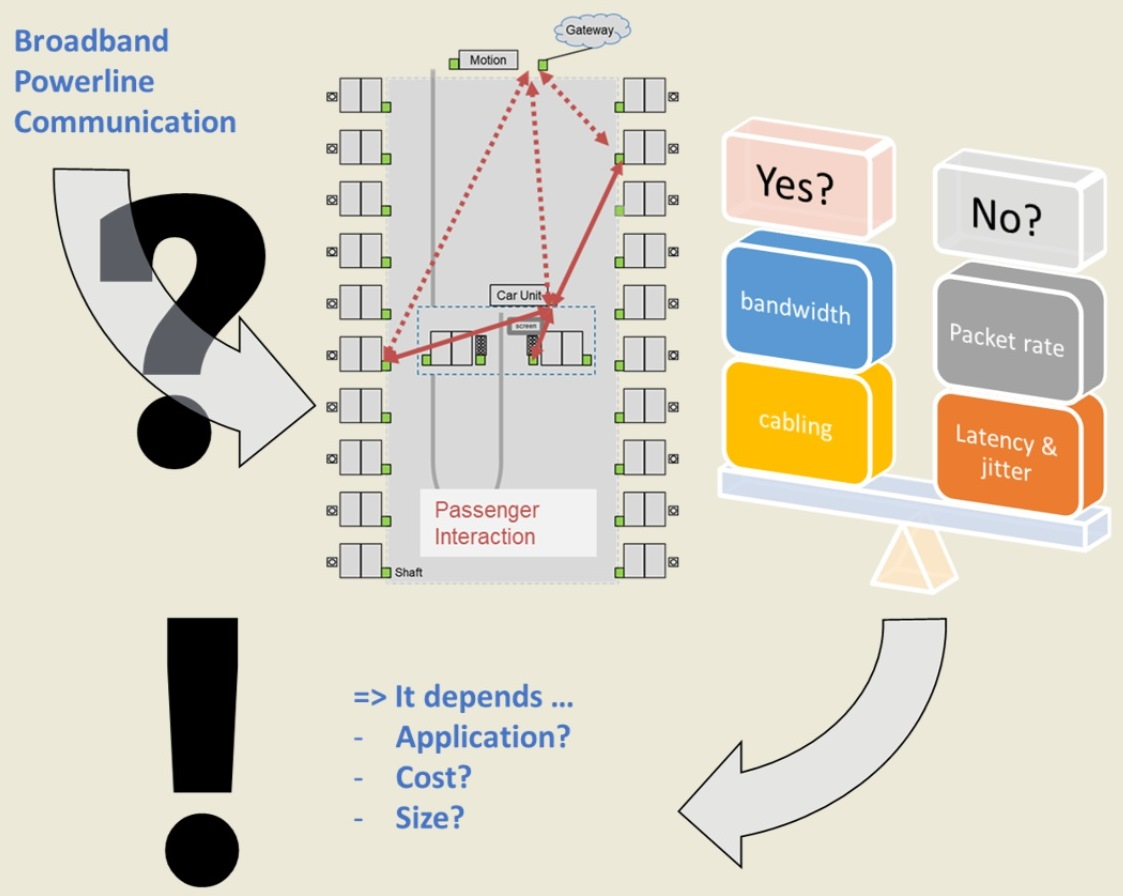
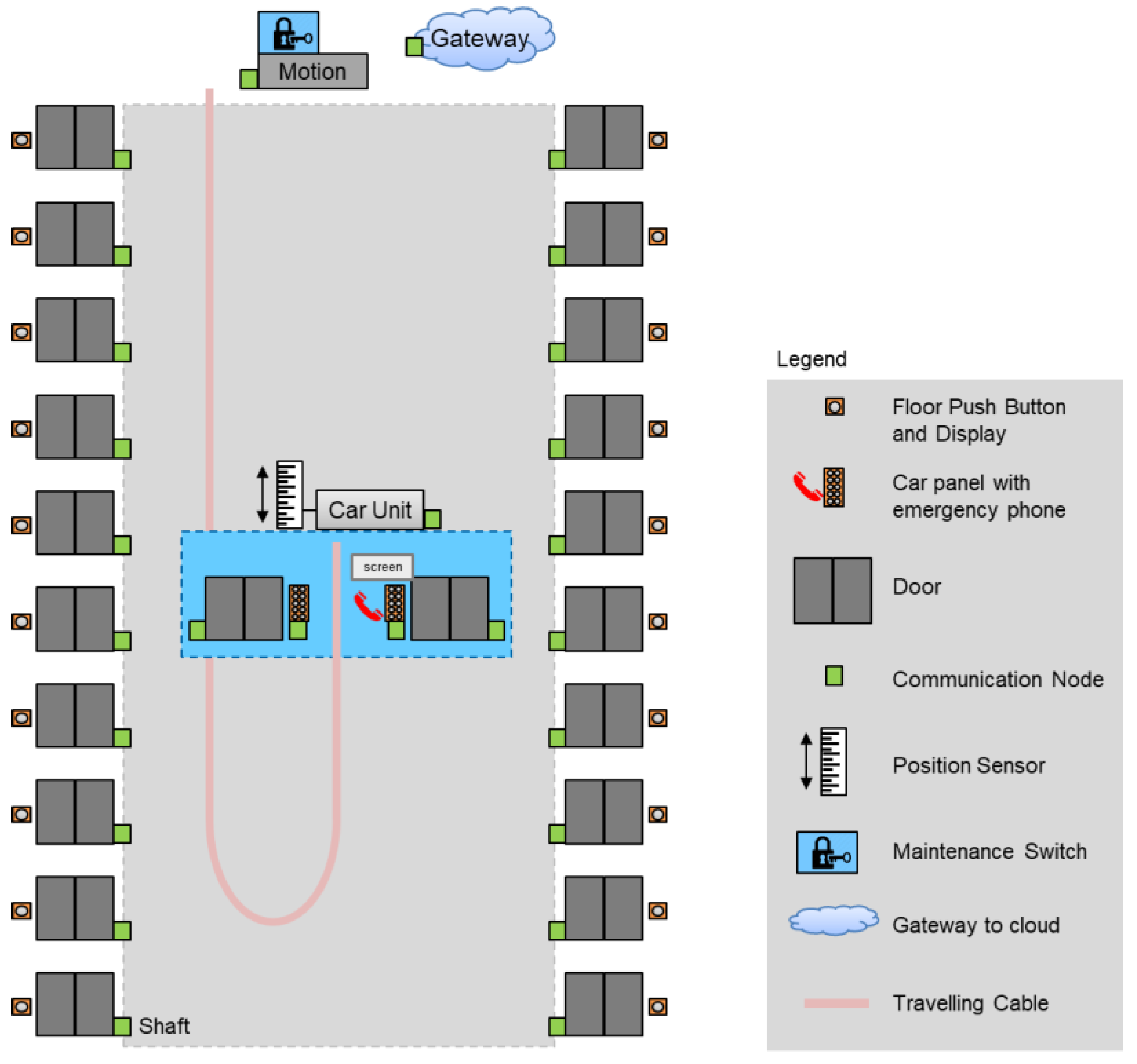
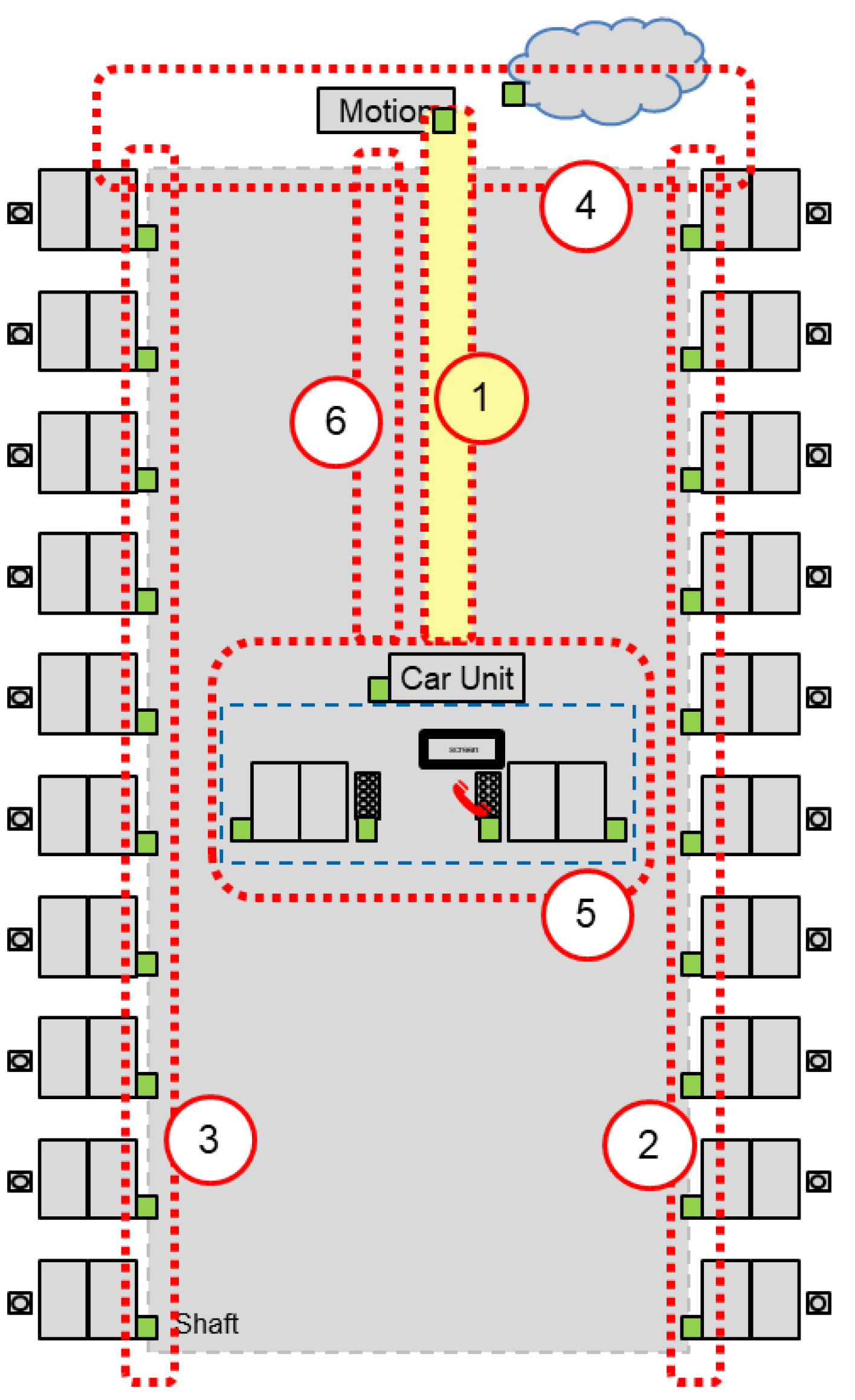
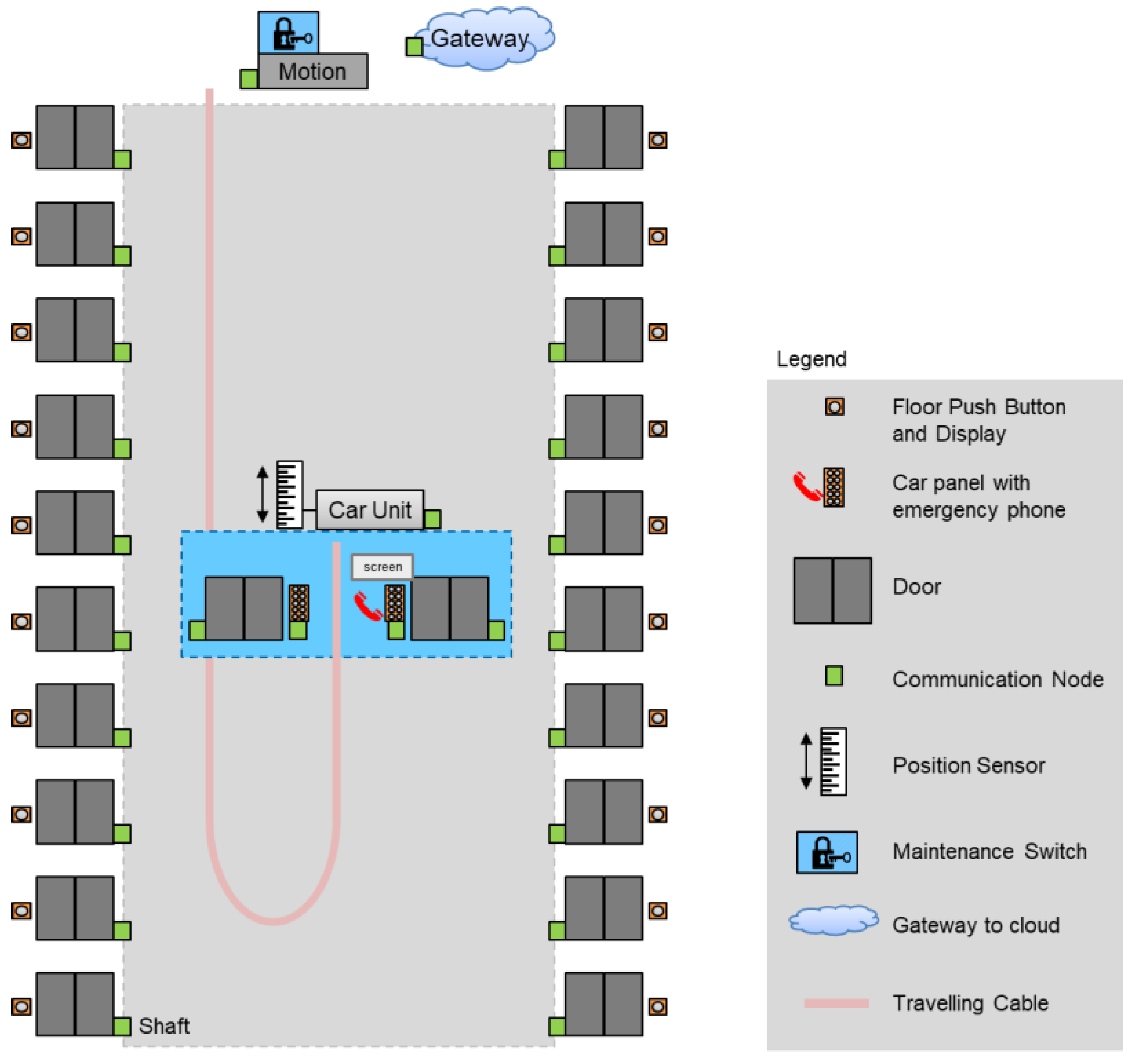
4. Sample Application: Elevator Control
- Cabling costs represent a significant proportion of the overall control system cost; thus, reducing the number of cables is economically relevant.
- Performance requirements are moderate compared to high-end industrial automation systems.
- BPLC is currently used in elevators. However, these existing use cases do not cover control of the elevator operation itself. Instead, they typically provide a separate communication means from a gateway mounted in the head of the shaft to the elevator car for voice and video transmission, or they interconnect elevator and door terminals throughout a building that belong to a system that optimizes the people flow through the complete building.
4.1. Elevator Control
- Trip control (movement of the car and doors)
- Passenger call handling and signaling
- Emergency communication, either to a central service center or to a local service desk
- Maintenance and service
4.2. Data Traffic Patterns and Performance Requirements
5. Results
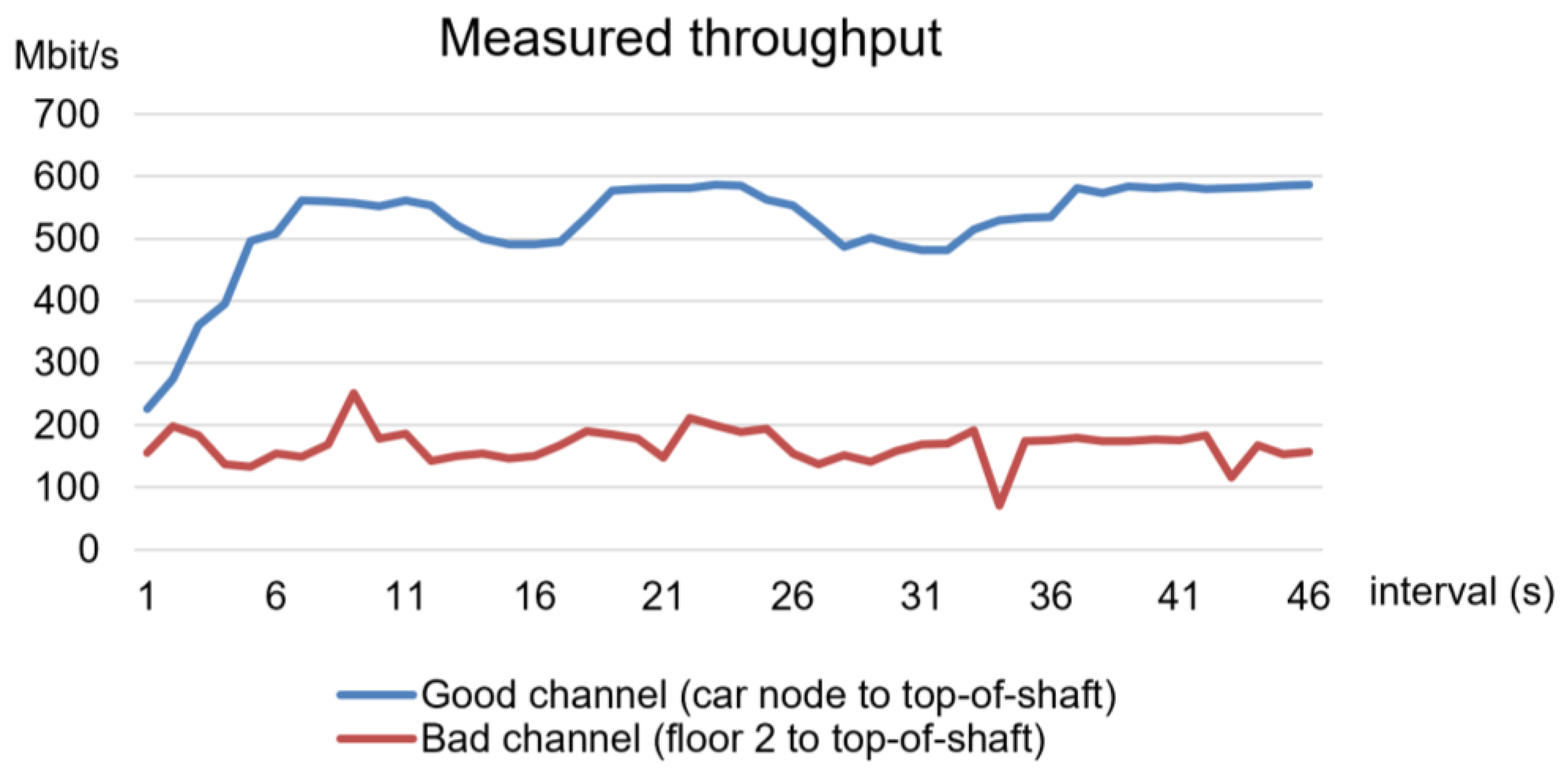
5.1. Channel and Throughput
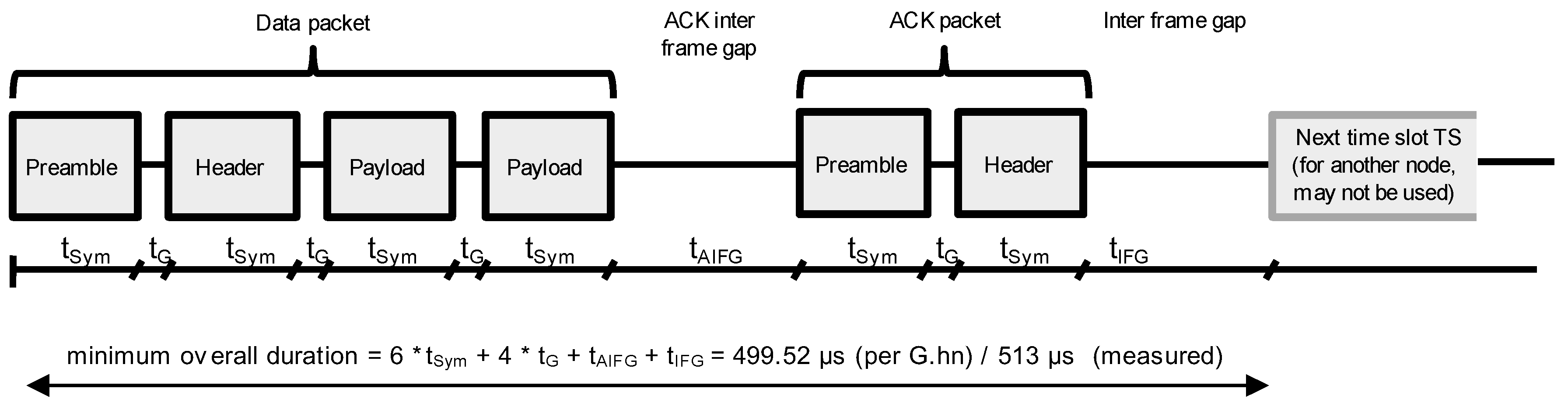
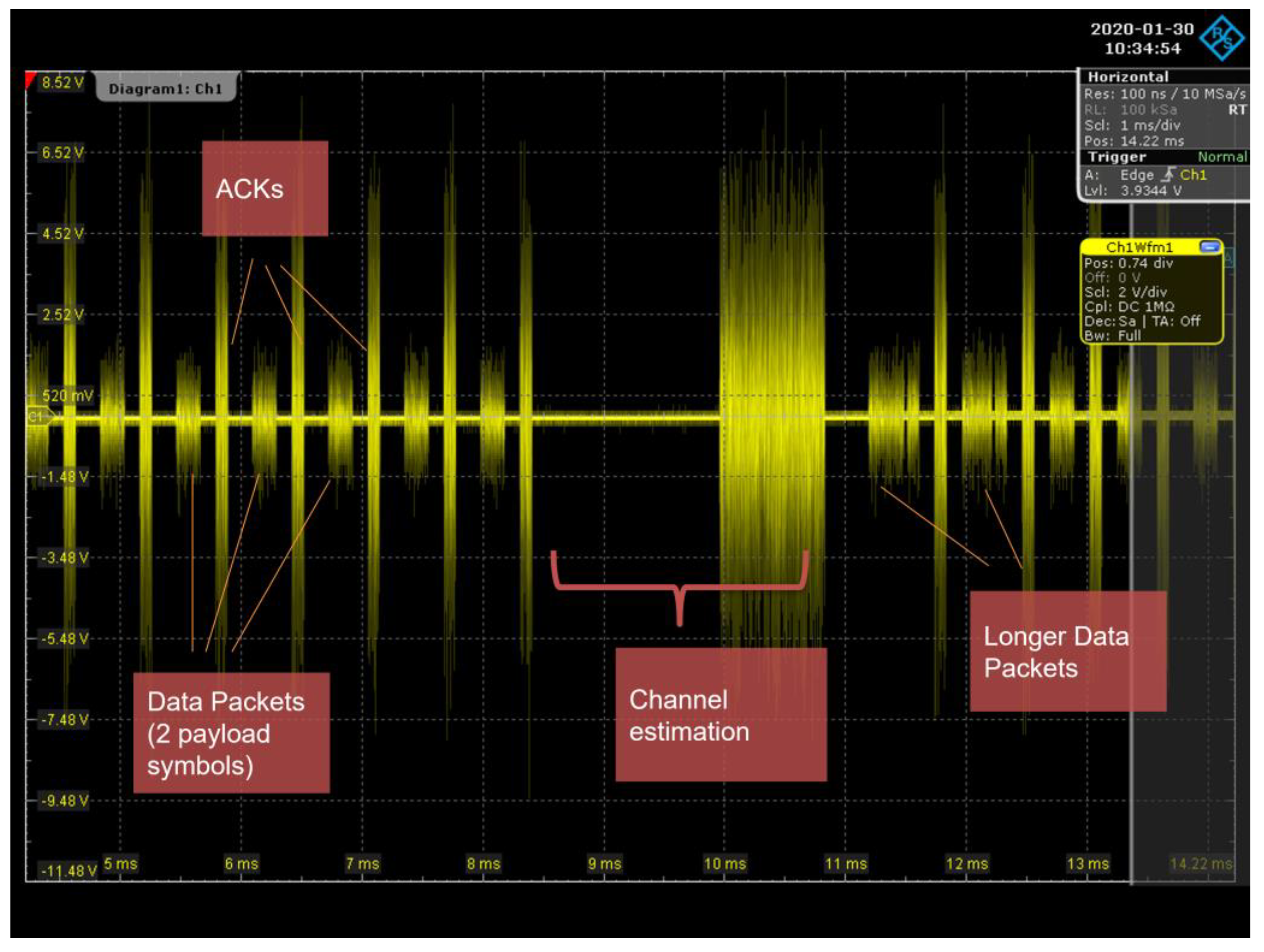
5.2. Physical Layer: Throughput and Packet Rate
| Symbol duration | tSym | 40.96 µs |
| Guard duration | tG | 10.24 µs |
| Inter frame gap (minimum value) | tIFG | 90 µs (default minimum) |
| Acknowledgement inter frame gap | tAIFG | 122.8 µs |
| Time Slot (TS) duration | tTS | 35.4 µs |
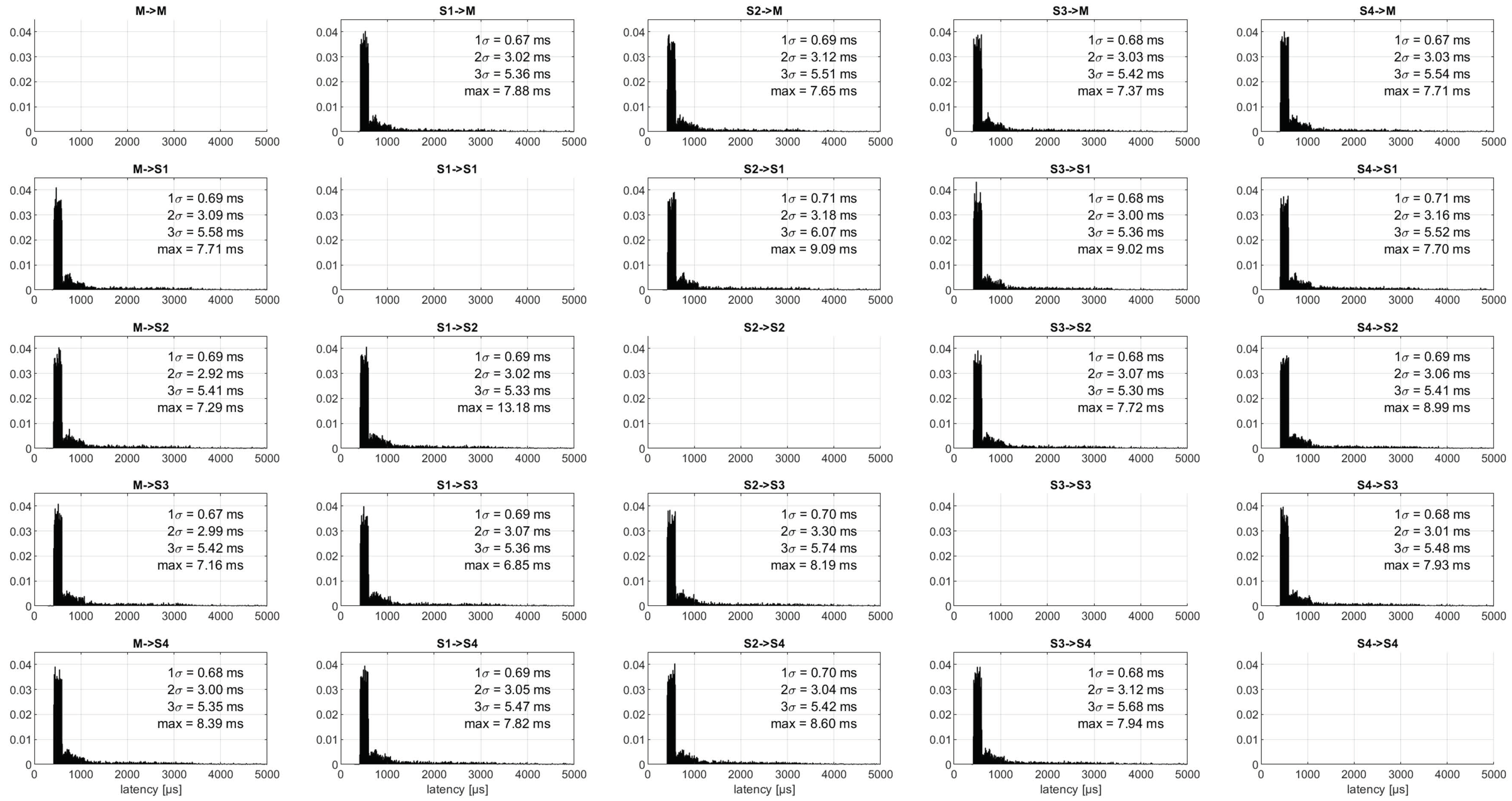
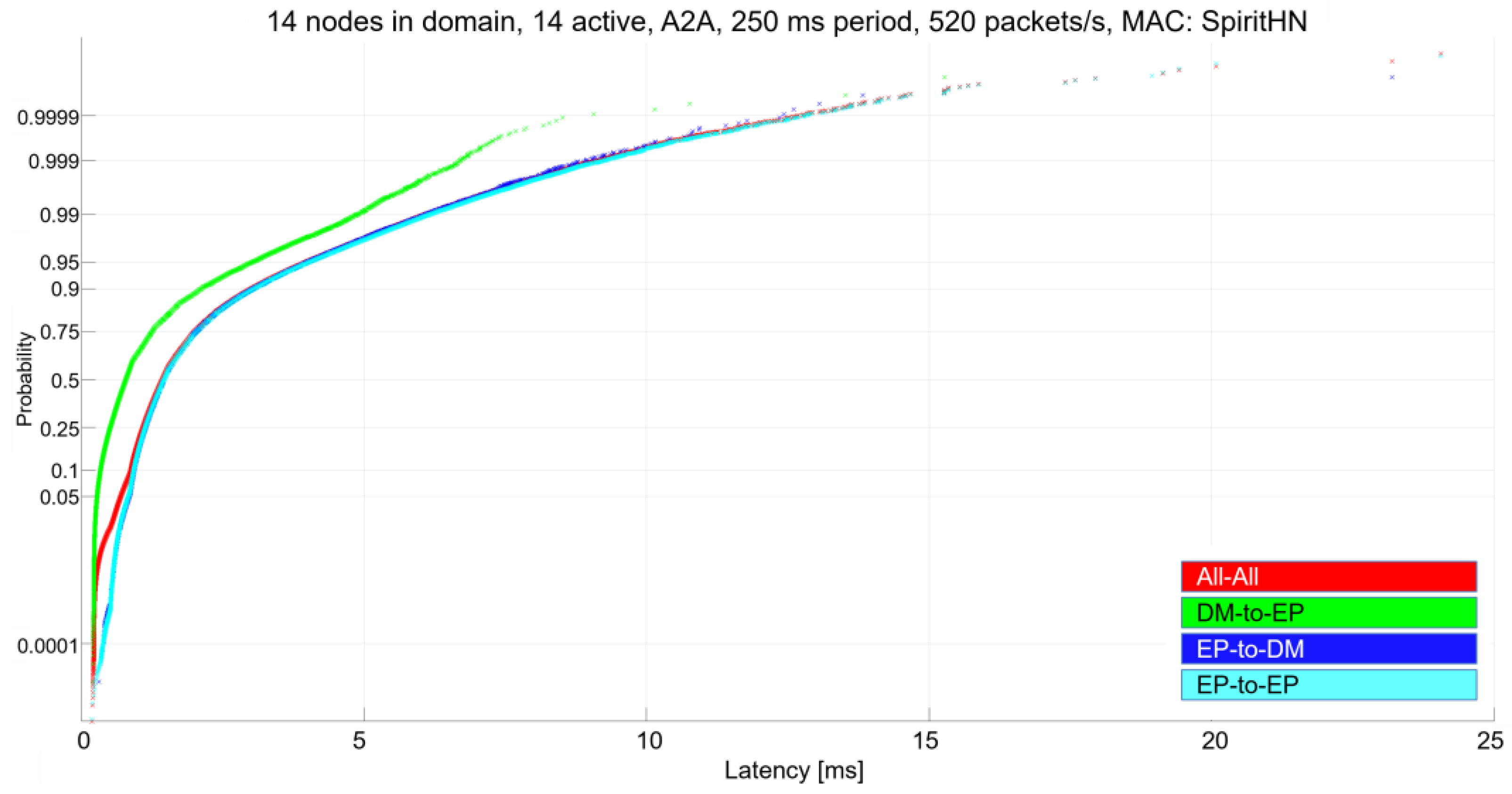
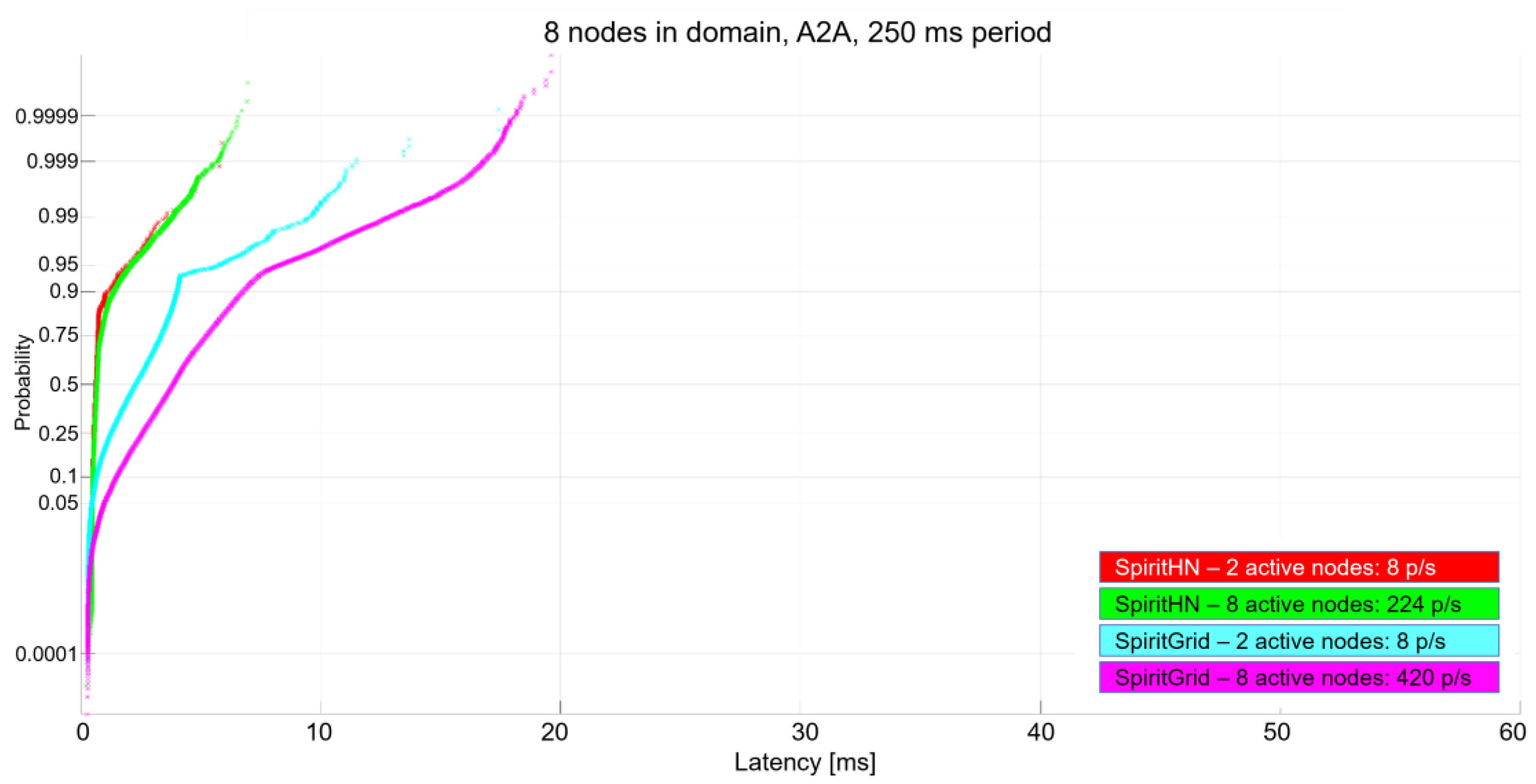
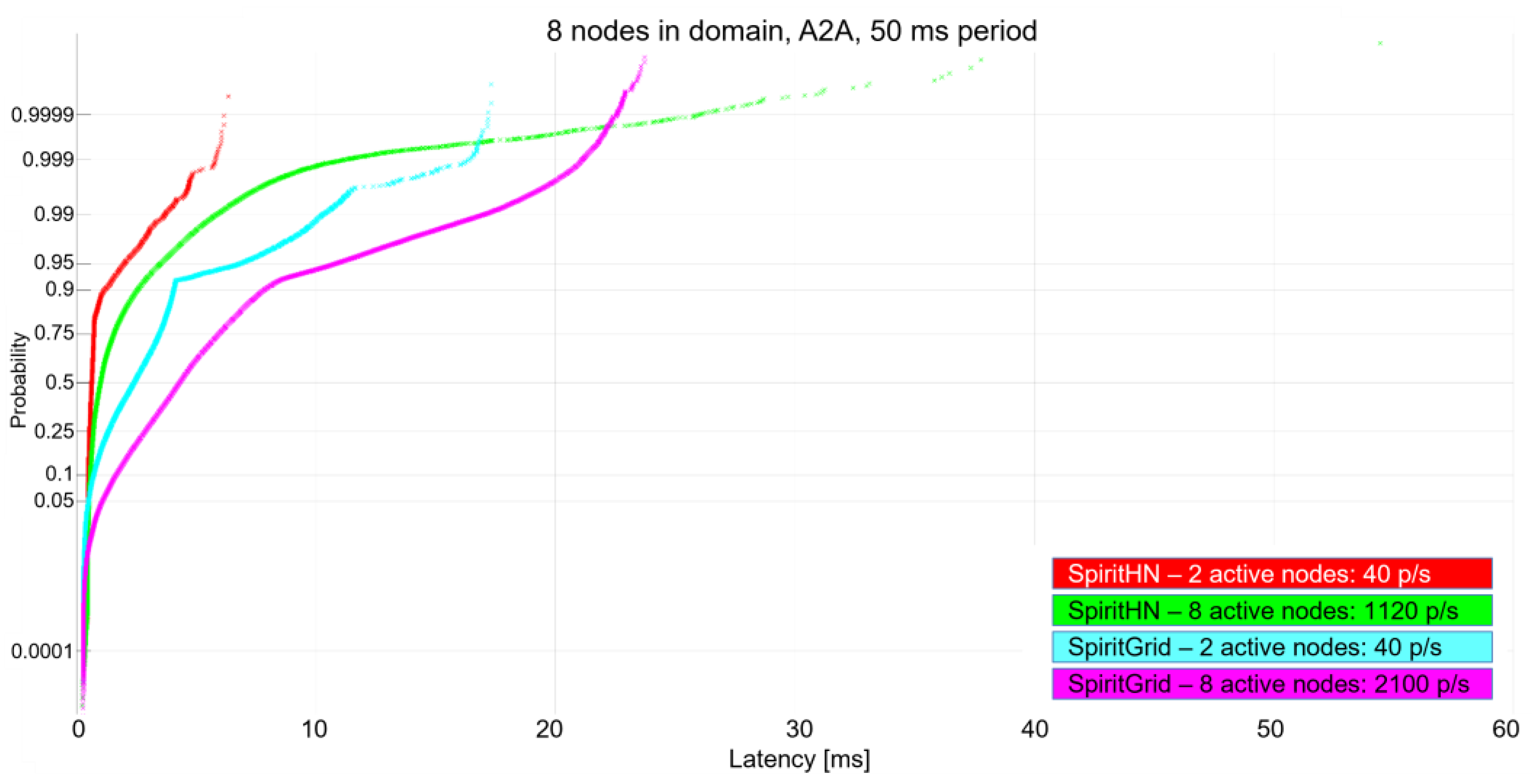
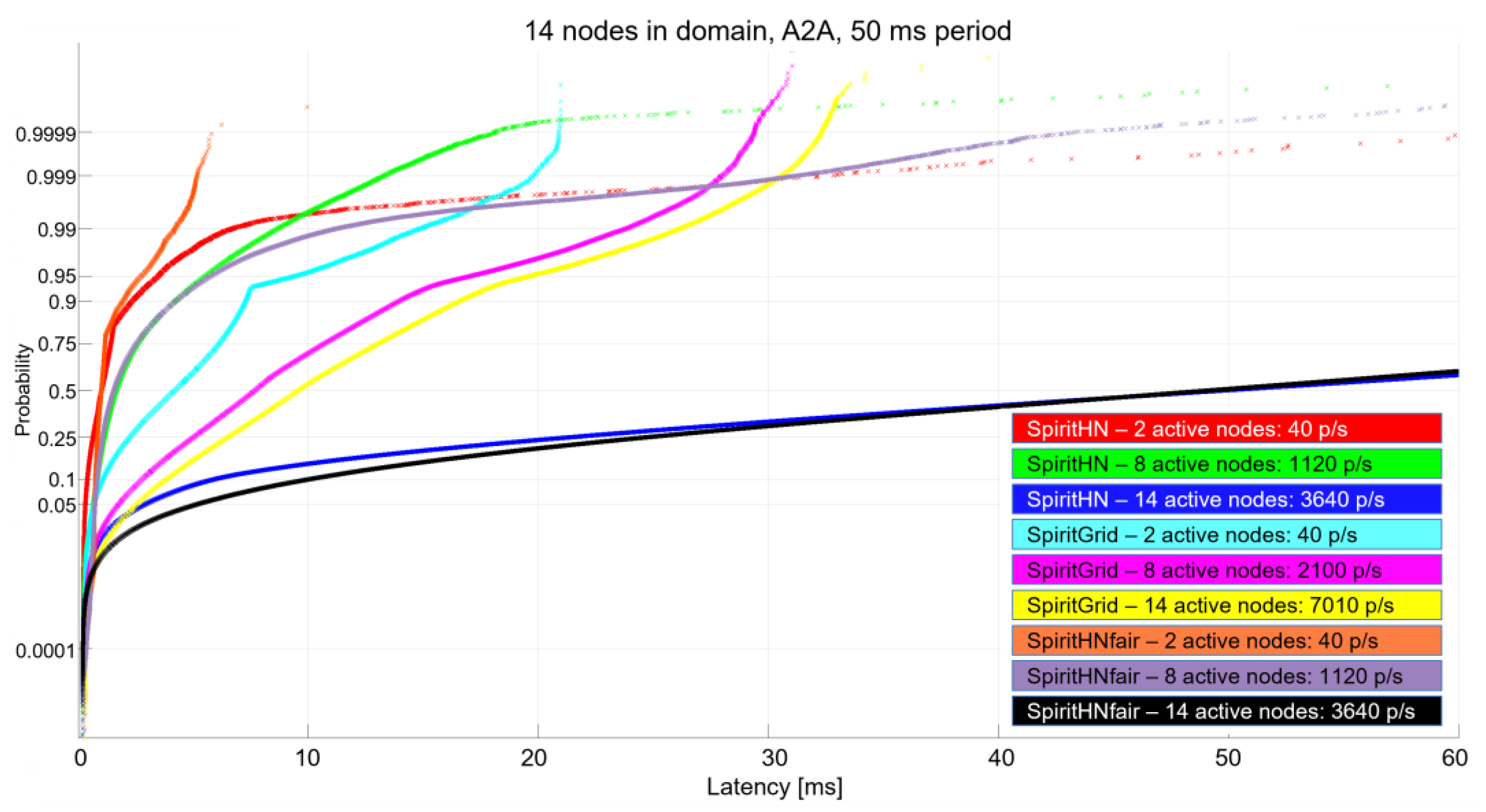
5.3. Medium Access: Latencies
6. Discussion
- The implemented and available MAC algorithms for the G.hn powerline profile are relatively simple, and many of the advanced features described in the G.hn recommendations are not implemented or controllable. (Note: For the phone line and coax profiles, more advanced features are available)
- The number of nodes with direct communication and the size of a flat G.hn domain is limited to 14.
6.1. Proposed Architecture
- latency distributions, and
- the resilience requirement, “No single point of failure impacting movement and emergency communication at the same time.”
6.2. Advantages and Disadvantages of BPLC for IIoT Applications
6.2.1. Benefits
6.2.2. Cons
6.3. Future Work
7. Threats to Validity
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| 1000BASE-T | Gigabit Ethernet (1 Gbit/s over four twisted wire pairs) |
| 100BASE-TX | Fast Ethernet (100 Mbit/s over two twisted wire pairs) |
| 10BASE-T1L | Ethernet Standard for 10 Mbit/s over a single twisted wire pair |
| 5G | 5th Generation Mobile Network Standard |
| A2A | All-to-All |
| AC | Alternating Current |
| ACK | Acknowledgement |
| AES | Advanced Encryption Standard |
| APU | Accelerated Processing Unit |
| ARQ | Automatic Repeat Request |
| BPLC | Broadband Powerline Communication |
| BPSK | Binary Phase Shift Keying |
| CAN | Controller Area Network |
| CBTS | Contention Based Time Slot |
| CFTS | Collision Free Time Slot |
| CFTXOP | Collision Free Transmit Opportunity |
| COGS | Costs of Goods Sold |
| COTS | Commercial off the Shelf |
| CPU | Central Processing Unit |
| CTC | Central Test Controller |
| DC | Direct Current |
| DM | Domain Master |
| EP | End Point |
| FEC | Forward Error Correction |
| FW | Firmware |
| Gbit | Gigabit |
| GW | Gateway |
| ICMP | Internet Control Message Protocol |
| IEC | International Electrotechnical Commission |
| IEEE | Institute of Electrical and Electronics Engineers |
| IioT | Industrial Internet of Things |
| IoT | Internet of Things |
| IP | Internet Protocol |
| ITU-T | International Telecommunication Union—Telecommunication Standardization Sector |
| LDPC | Low Density Parity Check |
| LTE | Long-Term Evolution (4th Generation Mobile Network Standard) |
| MAC | Medium Access Control |
| MAP | Media Access Plan |
| Mbit | Megabit |
| MIMO | Multiple Input Multiple Output |
| MQTT | Message Queuing Telemetry Transport |
| MSG | Message |
| NTP | Network Time Protocol |
| OFDM | Orthogonal Frequency Division Multiplexing |
| P2MP | Point to Multipoint |
| PC | Personal Computer |
| PHY | Physical Layer |
| POF | Passive Optical Fiber |
| PSD | Power Spectral Density |
| QAM | Quadrature Amplitude Modulation |
| QoS | Quality of Service |
| RAM | Read-Only Memory |
| RTE | Real Time Ethernet |
| RTS/CTS | Request to Send/Clear to Send |
| SFD | Start Frame Delimiter |
| SISO | Single-Input Single Output |
| SPE | Single Pair Ethernet |
| SpiritGrid | Spirit Grid Firmware/MAC Algorithm |
| SpiritHN | Spirit Home Network Firmware/MAC Algorithm |
| STXOP | Shared Transmit Opportunity |
| TCP | Transmission Control Protocol |
| TDMA | Time Division Multiple Access |
| TS | Time Slot |
| TSN | Time Sensitive Networking |
| TXOP | Transmit Opportunity |
| UDP | User Datagram Protocol |
| VoIP | Voice over IP |
| VoLTE | Voice over LTE |
Appendix A
| Powerline profile | MaxLinear DW920 G.hn Wave-2 Powerline Evaluation Kit Firmware versions: SpiritHN v7.8 SR5 r619+38 SpiritGrid v7.10 r780+2 | Product homepage: https://www.maxlinear.com/product/connectivity/wired/g-hn/evaluation-kits/dw920 (accessed on 20 August 2023) |
| Phone line profile | MaxLinear. DW920 G.hn Wave-2 Phone Line Evaluation Kit Firmware version: Firmware version SpiritP2MP v7.8 r619+19 | Product homepage: https://www.maxlinear.com/product/connectivity/wired/g-hn/evaluation-kits/dcp962p (accessed on 20 August 2023) |
| Network Analyzer | The measurements were done with the SNR monitor integrated in the DW920 powerline modems. |
| Network Analyzer | Rohde & Schwarz Vector Network Analyzer, 6 GHz, test ports: N (f), 50 W, R&S®ZVL6 | Product homepage: https://www.rohde-schwarz.com/ch-en/products/test-and-measurement/network-analyzers/rs-zvl-vector-network-analyzer_63493-9014.html (accessed on 8 November 2023) |
| Network traffic generation | iperf3 | Product homepage: https://iperf.fr/ (accessed on 8 November 2023) |
| Laptop Computers | HP Elitebook 840 G5 |
| Oscilloscope | Rohde & Schwarz Oscilloscope RTO1014, 1 GHz bandwidth, 10 GS/s | Product homepage: https://www.rohde-schwarz.com/ch-en/products/test-and-measurement/oscilloscopes/rs-rto1000-digital-oscilloscope_63493-191808.html (accessed on 8 November 2023) |
| Traffic generation and logging units | PC Engines® apu2e4 Debian Linux version | Product homepage: https://www.pcengines.ch/apu2.htm (accessed on 31 August 2023) |
| Data evaluation | Matlab Python | www.mathworks.com www.python.org (accessed on 8 November 2023) |
References
- Rahman, M.M.; Hong, C.S.; Lee, S.; Lee, J.; Razzaque, M.A.; Kim, J.H. Medium access control for power line communications: An overview of the IEEE 1901 and ITU-T G.hn standards. IEEE Commun. Mag. 2011, 49, 183–191. [Google Scholar] [CrossRef]
- ITU. Recommendation ITU-T G.9960 (2018)—Amendment 3; Unified High-Speed Wireline-Based Home Networking Transceivers—System Architecture and Physical Layer Specification Amendment 3; International Telecommunication Union: Geneva, Switzerland, 2022. [Google Scholar]
- ITU. Recommendation ITU-T G.9961 (2018)—Amendment 4; Unified High-Speed Wireline-Based Home Networking Transceivers—Data Link Layer Specification Amendment 4; International Telecommunication Union: Geneva, Switzerland, 2022. [Google Scholar]
- ITU. Recommendation ITU-T G.9962 (04/2023); Unified High-Speed Wire-Line Based Home Networking Transceivers—Management Specification; International Telecommunication Union: Geneva, Switzerland, 2023. [Google Scholar]
- ITU. Recommendation ITU-T G.9963 (06/23); Unified High-Speed Wireline-Based Home Networking Transceivers—Multiple Input/Multiple Output Specification; International Telecommunication Union: Geneva, Switzerland, 2023. [Google Scholar]
- Xing, L. Reliability in Internet of Things: Current Status and Future Perspectives. IEEE Internet Things J. 2020, 7, 6704–6721. [Google Scholar] [CrossRef]
- Bures, M.; Klima, M.; Rechtberger, V.; Ahmed, B.S.; Hindy, H.; Bellekens, X. Review of Specific Features and Challenges in the Current Internet of Things Systems Impacting their Security and Reliability. arXiv 2023, arXiv:2101.02631. [Google Scholar]
- IEEE TSN Task Group. Available online: https://1.ieee802.org/tsn/ (accessed on 24 October 2023).
- Dominiak, S.; Serbu, S.; Schneele, S.; Nuscheler, F.; Mayer, T. The Application of commercial Power Line communications technology for Avionics Systems. In Proceedings of the 31st Digital Avionics Systems Conference, Williamsburg, VA, USA, 16–20 October 2012. [Google Scholar]
- De Oliveira, R.M.; Vieira, A.B.; Latchman, H.A.; Ribeiro, M.V. Medium Access Control Protocols for Power Line Communication: A Survey. IEEE Commun. Surv. Tutor. 2019, 21, 920–939. [Google Scholar] [CrossRef]
- Mudriievskyi, S.; Lehnert, R. Performance evaluation of the G.hn PLC PHY layer. In Proceedings of the 18th IEEE International Symposium on Power Line Communications and Its Applications, Glasgow, UK, 30 March–2 April 2014; pp. 296–300. [Google Scholar] [CrossRef]
- Pereira, S.C.; Caporali, A.S.; Casella, I.R.S. Power line communication technology in industrial networks. In Proceedings of the 2015 IEEE International Symposium on Power Line Communications and Its Applications (ISPLC), Austin, TX, USA, 29–31 March 2015; pp. 216–221. [Google Scholar] [CrossRef]
- Bucci, G.; Ciancetta, F.; Fiorucci, E.; Fioravanti, A.; Prudenzi, A. A Pulse Oximetry IoT System Based on Powerline Technology. In Proceedings of the 2019 II Workshop on Metrology for Industry 4.0 and IoT (MetroInd4.0&IoT), Naples, Italy, 4–6 June 2019; pp. 268–273. [Google Scholar] [CrossRef]
- ITU-T. Use of G.hn in Industrial Applications, Technical Paper GSTP-HNIA 2020. Available online: https://handle.itu.int/11.1002/pub/81590347-en (accessed on 18 July 2023).
- Kupczak, R. Up with G.hn—An Elevating Trend. LinkedIn Post. 2023. Available online: https://www.linkedin.com/pulse/ghn-elevating-trend-rafa%C5%82-kupczak/ (accessed on 24 October 2023).
- Klasen, F.; Oestreich, V.; Volz, M. (Eds.) Industrial Communication with Fieldbus and Ethernet; VDE Verlag GmbH: Berlin, Germany, 2011; ISBN 978-3-8007-3358-3. [Google Scholar]
- ITU. Recommendation ITU-T G.9964 (2011)—Amendment 3; Unified High-Speed Wireline-Based Home Networking Transceivers—Power spectral density distribution Amendment 3. ITU-T, Recommendation; International Telecommunication Union: Geneva, Switzerland, 2020. [Google Scholar]
- ITU-T. Overview of the ITU-T G.hn Technology, Technical Paper. GSTP-OVHN. 2021. Available online: https://www.itu.int/en/publications/ITU-T/pages/publications.aspx?parent=T-TUT-HOME-2021-3&media=electronic (accessed on 1 September 2023).
- ITU-T. Operation of G.hn Technology over access and In-Premises Phone Line Medium, Technical Paper. GSTP-OPHN. 2022. Available online: https://www.itu.int/pub/T-TUT-HOME-2022 (accessed on 1 September 2023).
- MaxLinear. DW920 G.hn Wave-2 Powerline Evaluation Kit. Available online: https://www.maxlinear.com/product/connectivity/wired/g-hn/evaluation-kits/dw920 (accessed on 20 August 2023).
- MaxLinear. DW920 G.hn Wave-2 Phone Line Evaluation Kit. Available online: https://www.maxlinear.com/product/connectivity/wired/g-hn/evaluation-kits/dcp962p (accessed on 20 August 2023).
- PC Engines Single-Board Computers. Available online: https://www.pcengines.ch/apu2.htm (accessed on 31 August 2023).
- WEG. Automation Europe, Application: DCP3/4, Clause 1.6 DCP3/4 Connection Characteristics. 2023. Available online: https://static.weg.net/medias/downloadcenter/h43/h75/WEG-ADL300-DCP-user-manuals-1S9DPEN-en.pdf (accessed on 10 October 2023).
- IEEE Std 802.1AS-2020; IEEE Standard for Local and Metropolitan Area Networks—Timing and Synchronization for Time-Sensitive Applications. IEEE: New York, NY, USA, 2020. [CrossRef]
- IEEE. P802.3da 10 Mb/s Single Pair Multidrop Segments Enhancement Task Force. PAR and Objectives updated 13 July 2023. Available online: https://www.ieee802.org/3/da/ (accessed on 18 October 2023).



| Nodes Active in Communication | ||||||
|---|---|---|---|---|---|---|
| 2 Nodes (1 DM, 1 EP) | 8 Nodes (1 DM, 7 EP) | 14 Nodes (1 DM, 13 EP) | ||||
| Packet period (ms) | 50 | 250 | 50 | 250 | 50 | 250 |
| Packet rate (p/s) | 40 | 8 | 1120 | 224 | 3640 | 728 |
| Packet rate w/relaying (p/s) | 40 | 8 | 2100 | 420 | 7020 | 1404 |
| Net bandwidth (64-byte packets) (Mbit/s) | 0.0205 | 0.0041 | 0.5736 | 0.1147 | 1.8637 | 0.3727 |
| Net bandwidth (64-byte packets w/relaying) (Mbit/s) | 0.0205 | 0.0041 | 1.0752 | 0.2150 | 3.5891 | 0.7188 |
| Nodes Active in Communication | ||||||
|---|---|---|---|---|---|---|
| 2 Nodes (1 DM, 1 EP) | 8 Nodes (1 DM, 7 EP) | 14 Nodes (1 DM, 13 EP) | ||||
| Packet period (ms) | 50 | 250 | 50 | 250 | 50 | 250 |
| Packet rate (p/s) | 40 | 8 | 280 | 56 | 520 | 104 |
| Net bandwidth (64-byte packets) (Mbit/s) | 0.0205 | 0.0041 | 0.1434 | 0.0287 | 0.2662 | 0.0532 |
| Category | Value | Comment |
|---|---|---|
| Latency car unit—Motion | 3 ms (no timestamping) | The most stringent requirement comes from the learning trip (accuracy of absolute position 1 mm or 3 ms sampling time deviation at 0.3 m/s travel speed). For a normal trip, when approaching a landing, the speed is lower, and the latency requirements are less stringent. If time sync and time stamping of positioning data is used, the latency requirement can be relaxed |
| 15 ms (time stamping and time sync accuracy 3 ms) | ||
| Jitter car node—Motion | 3 ms/15 ms | The requirement for the learning trip is a jitter requirement, any constant delay can be compensated. However, since best case transmission times are <1 ms, the jitter requirement is equivalent to a latency requirement. |
| Latency car node—Car/Landing door | 10–50 ms | Monitor door locking in the absence of a conventional safety chain through the landing doors (optional). Car door is mandatory. |
| Latency voice terminal—GW node | <150 ms | For voice communication (VoIP), the value is based on ITU-T recommendation G.114, according to which the total end-to-end delay from the microphone to the call center agent shall not exceed 400 ms. The remaining margin is reserved for the connection between the GW node and call center. |
| Jitter voice terminal—GW node | <75 ms | For planning purposes, it is recommended to assume that a de-jitter buffer adds one half of its peak delay to the mean network delay (ITU-T recommendation G.114). |
| Throughput | 200–500 kbps | Average during normal operation (overall throughput) |
| 50–250 ms | Message generation period per node, normal operation | |
| Single-digit Mbps | Additional background traffic in phases of extensive monitoring (from observed node(s) to gateway node) | |
| 100 kbps | Emergency call (high quality VoIP, bidirectional) | |
| 25 Mbps | Requirements for FW download for maximum size system (unidirectional file transfer payload throughput) |
| Criterion | SpiritHN | SpiritHNFair | SpiritGrid |
|---|---|---|---|
| Medium access | Implicit round-robin | Polling, DM relays traffic | |
| DM claims every second slot if >8 nodes in domain | Always fair access | ||
| Network structure | Flat, up to 14 nodes | Hierarchical tree with subdomains. Max 13 nodes per subdomain. | |
| Latency | 99-percentile latency lower than for SpiritGrid | For high loads, better worst-case behavior. | |
| Bounded latency | No | Yes | |
| Percentile | Powerline Profile | Phone Line Profile |
|---|---|---|
| 1 σ (68%) | 0.37 ms | 0.23 ms |
| 3 σ (99.7%) | 4.57 ms | 1.47 ms |
| Maximum value | 7.57 ms | 2.82 ms |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Brunner, K.; Dominiak, S.; Ostertag, M. Application of G.hn Broadband Powerline Communication for Industrial Control Using COTS Components. Technologies 2023, 11, 160. https://doi.org/10.3390/technologies11060160
Brunner K, Dominiak S, Ostertag M. Application of G.hn Broadband Powerline Communication for Industrial Control Using COTS Components. Technologies. 2023; 11(6):160. https://doi.org/10.3390/technologies11060160
Chicago/Turabian StyleBrunner, Kilian, Stephen Dominiak, and Martin Ostertag. 2023. "Application of G.hn Broadband Powerline Communication for Industrial Control Using COTS Components" Technologies 11, no. 6: 160. https://doi.org/10.3390/technologies11060160
APA StyleBrunner, K., Dominiak, S., & Ostertag, M. (2023). Application of G.hn Broadband Powerline Communication for Industrial Control Using COTS Components. Technologies, 11(6), 160. https://doi.org/10.3390/technologies11060160