1. Introduction
The pitch damping moment coefficient sum
is a major factor for a projectile’s dynamic stability in flight [
1]. Its knowledge early on in the design process is advantageous with regard to flight behavior and control system design. This is particularly true for flight at transonic Mach numbers where aerodynamic forces and moments can undergo significant changes for small velocity deviations.
Although CFD methods are improving, there is still a need for experimental reference data. The experimental methods most commonly used for projectile design are free-flight tests [
2]. However, flight test results commonly show high scatter and large uncertainties close to Mach 1 [
3]. Therefore, there is a need for an experimental method that allows for precise measurements of
. Various methods for its experimental determination in a wind tunnel setup have been developed [
4,
5], but are often not well suited for testing projectile configurations at transonic Mach numbers. The main reason for this is support interferences due to the combination of small model sizes and the larger sting support necessary for the dynamic tests, which result in large measurement uncertainties. In addition, wall interference can be a limiting factor, depending on model size and blockage ratio [
6,
7]. Therefore, methods like the forced-oscillation technique [
8] that use a traditional sting support depend on the availability of a sufficiently large wind tunnel.
The present study aims to develop a method for the experimental determination of that is suitable for slender bodies such as missile configurations, and can be used in a wind tunnel with a limited cross-section at transonic speeds. The approach and the experimental setup, as well as the evaluation process, are described in this paper. The results are validated through comparison with CFD simulations as well as experimental and numerical data found in the literature.
Preliminary results of this project have been presented in [
9].
2. Concept
The main challenges identified in relation to dynamic tests in the ISL’s trisonic wind tunnel are due to the small model size. As the tunnel cross-section is 300
× 400
, the model size is limited to diameters of up to 40
for subsonic Mach numbers in order to limit wall interference. Most established methods for dynamic tests require some mechanical and possibly some sensor equipment either inside the model or in the model support system. In the first case, the small model size required renders the integration of such equipment challenging and thus expensive. In the second case, installing the necessary equipment inside the sting-strut support used in the ISL trisonic wind tunnel would pose the same problem and most likely increase the sting diameter, potentially causing flow blockage issues at Mach numbers close to 1.0 and driving up support interference to a level where accurate measurements are no longer possible [
4,
10].
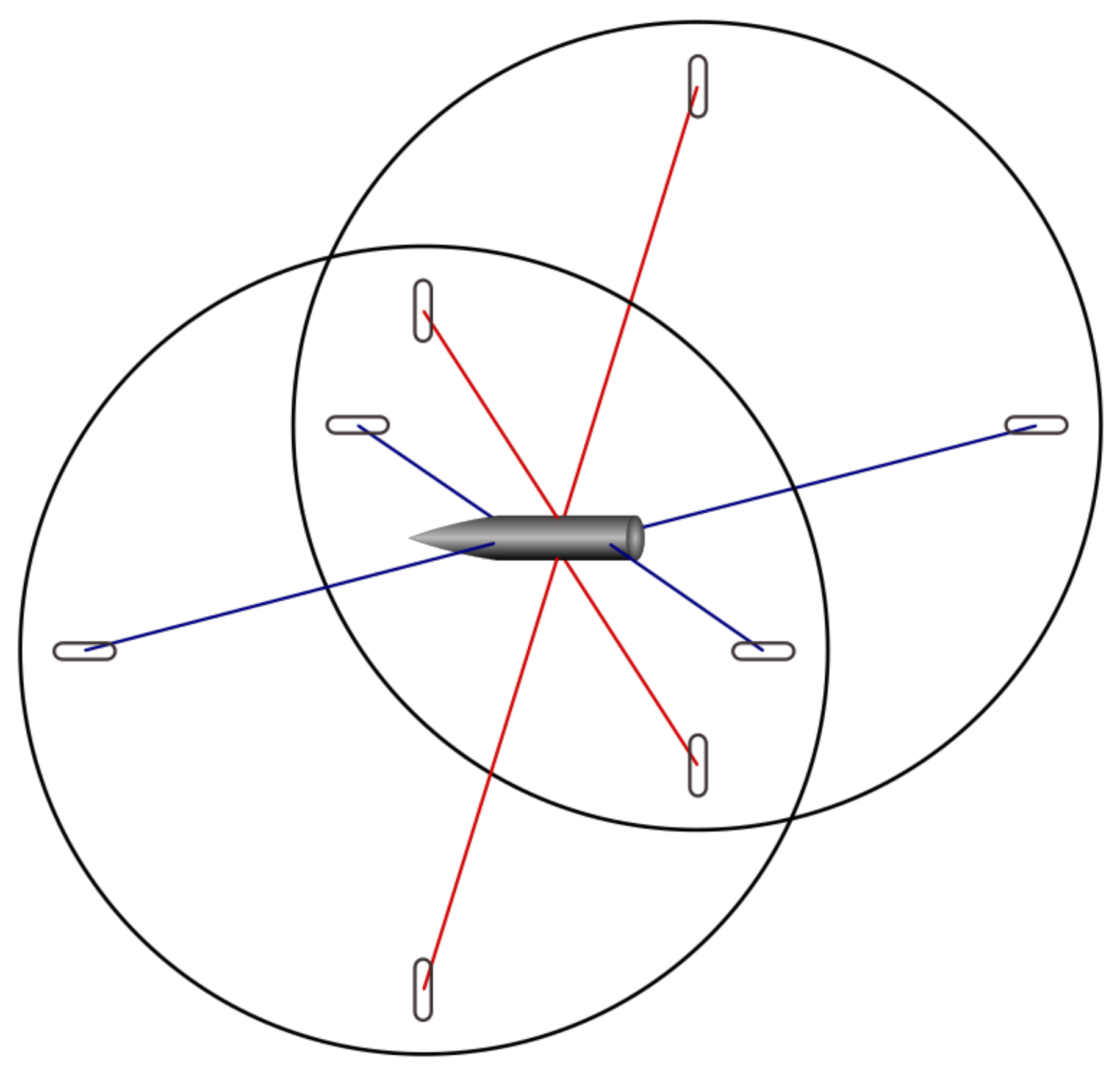
The concept investigated in this project uses a wire suspension and a solid model without any internal sensors, thus enabling measurements with minimal support interference without the need for complex and expensive model instrumentation. The suspension geometry is designed such that motion limited to approximately ± 8
around the pitching axis is possible. The restoring moment depends on the wire tension providing a means to control the oscillation frequency and to stabilize a statically unstable model configuration. For all other degrees of freedom the restoring forces and moments depend on the axial stiffness of the wires as a function of the Young’s modulus and the cross-section area. As this is two to three orders of magnitude higher compared to the tensioning force for the steel wires used, any significant motion is effectively blocked. The wire suspension consists of eight stainless-steel wires with a diameter of
, which are attached to the wind tunnel side walls using a gripping mechanism. For some tests the diameter of the four front and rear wires was varied. A sketch of the wire suspension geometry is shown in
Figure 1.
4. Evaluation Approach
Based on the full equations of motion a simplified single-degree of freedom equation for the pitching angle
has been derived under the assumption of negligibly small motions in all other degrees of freedom. The simplified pitching motion is described by the differential equation:
where the linear stiffness coefficient
describes both the aerodynamic as well as the mechanical influences whereas the cubic stiffness coefficient
describes the mechanical influence caused by the suspension geometry. The damping coefficient
is the sum of the aerodynamic and the mechanical damping coefficients
and
. While
can be assumed to be constant for the oscillation amplitudes of the measurements conducted for this study,
and thus also
show a small dependence on the momentary oscillation amplitude
.
Due to the low dependence on the current amplitude, a constant momentary decay coefficient
can be calculated between two subsequent peaks (of maximum displacement)
and
at times
and
using the logarithmic decrement method [
11]. The influence of the cubic stiffness term is observed by applying a nonlinear correction factor
, which is derived from the perturbation solution [
18] based on the exact solution to the differential equation
. Thus a modified logarithmic decrement method is used to calculate the momentary decay coefficient
:
Using Equation (
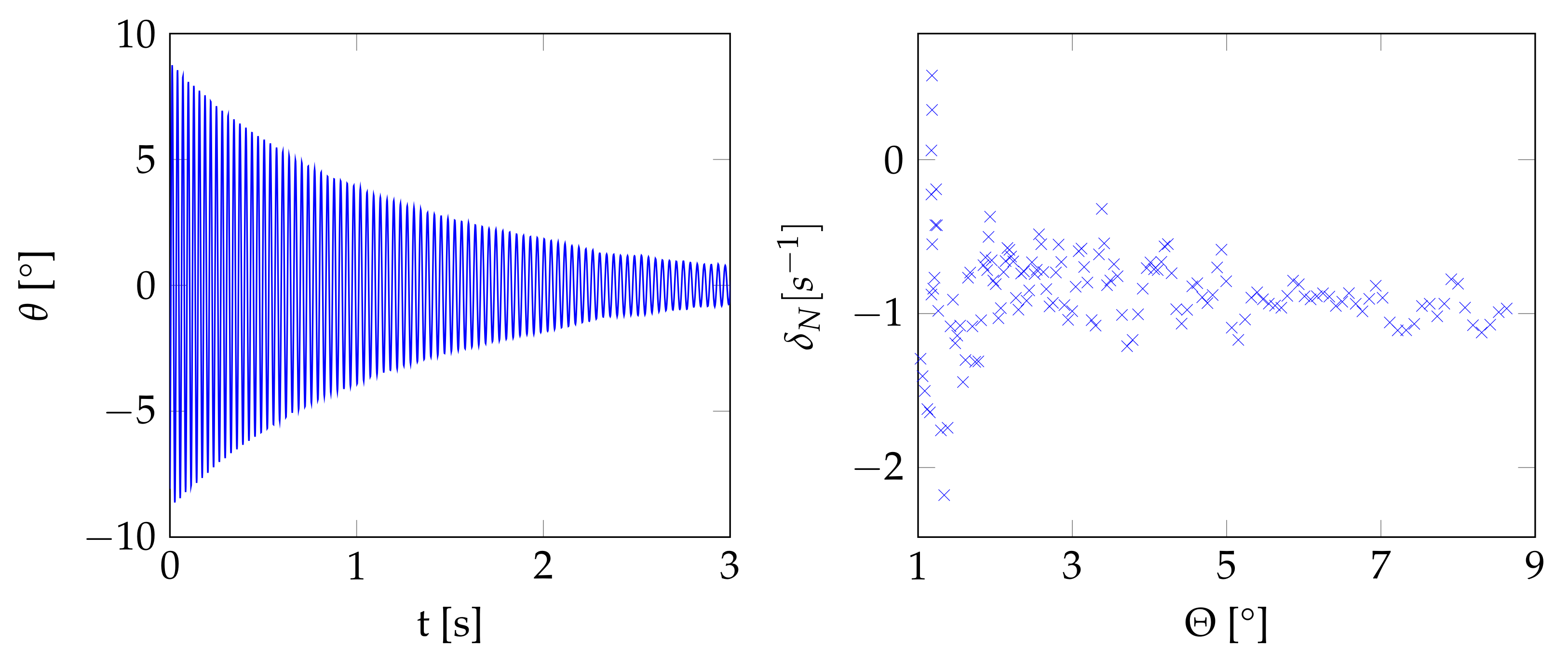
2), a number of measurement points of
can be obtained from the pitch angle time history of a wind tunnel test run (respectively
from a tare run). An example of both the pitch angle history as well as the measurements of
over
extracted from that set of raw data is shown in
Figure 4.
As can be seen in
Figure 4, the individual measurements of
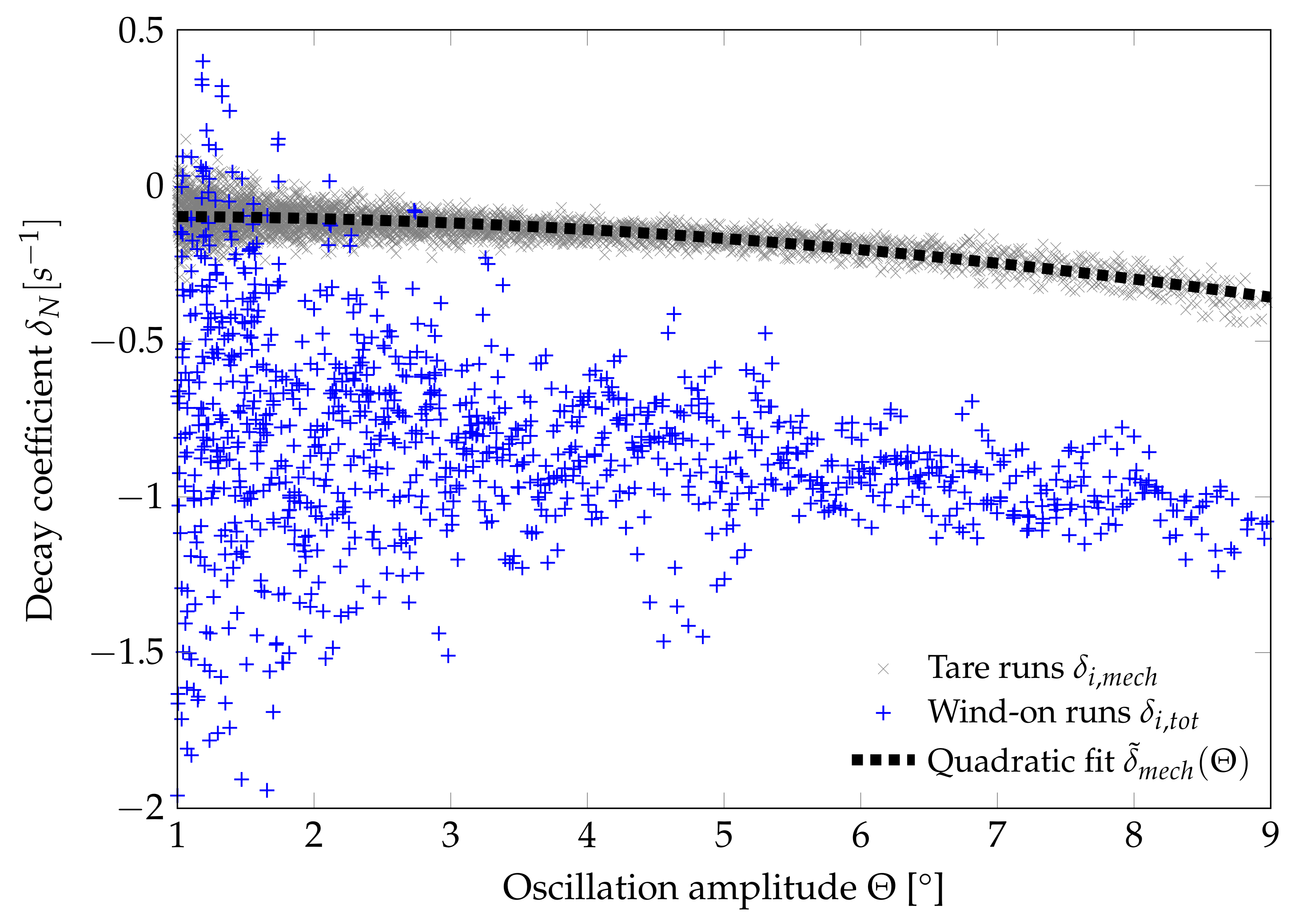
show a distinct scatter due to turbulence, resonance effects and measurements uncertainties, causing small deviations from a smooth decay behavior. For a sufficiently large number of tests, the cumulative influence of all these effects can be averaged out. Therefore, repeat tests at the same conditions are conducted and are evaluated together as one test case. An example of the data from such a case is shown in
Figure 5, including data from seven wind-on as well as four tare runs.
In the next step, the measurements of
need to be subtracted from
to determine
. A weighted least-squares approach is used to calculate a quadratic model function
based on the data from the tare runs. The weights are based on the point density over the oscillation amplitude as fewer measurements are available at larger amplitudes. This model is then used to correct the wind-on measurements
in order to obtain the aerodynamic damping measurements
:
As can be seen in
Figure 5, the dispersion of the
data (and thus the
data) is significantly higher compared to
and increases towards lower oscillation amplitudes. In order to correct for this effect, weights
are assigned to the data points based on the mean deviation at their corresponding oscillation amplitude. This process is based on a two-step estimator for heteroscedastic data [
19]. Using these weights, a weighted mean
and a weighted standard deviation
can be calculated. With the sum of weights
a weighted standard error of the mean
can be obtained.
In the last step, the decay coefficient
is converted in order to obtain the stability derivative
using the relation:
with the model diameter
D and the model reference area
, model mass
m and moment of inertia
, the speed of sound
a, the static pressure
, the free-stream velocity
and the heat capacity ratio
.
is the distance between the center of rotation and the model’s center of gravity. If these coincide, Equation (
4) reduces to an expression for the stability derivative. If not, the contribution of the pitch damping force coefficient sum
can be eliminated by combining Equation (
4) with the translation relation [
20]:
and thus calculating the pitch damping moment coefficient sum with respect to the model’s center of gravity
. Therefore the pitching moment coefficient
and the normal force coefficient
are needed. Since these coefficients are static, large databases of experimental and numerical results are usually available in the literature and hence semi-empirical methods also yield good results.
The standard error
can also be converted in coefficient form using Equation (
4) thus giving the uncertainty range for the aerodynamic coefficients.
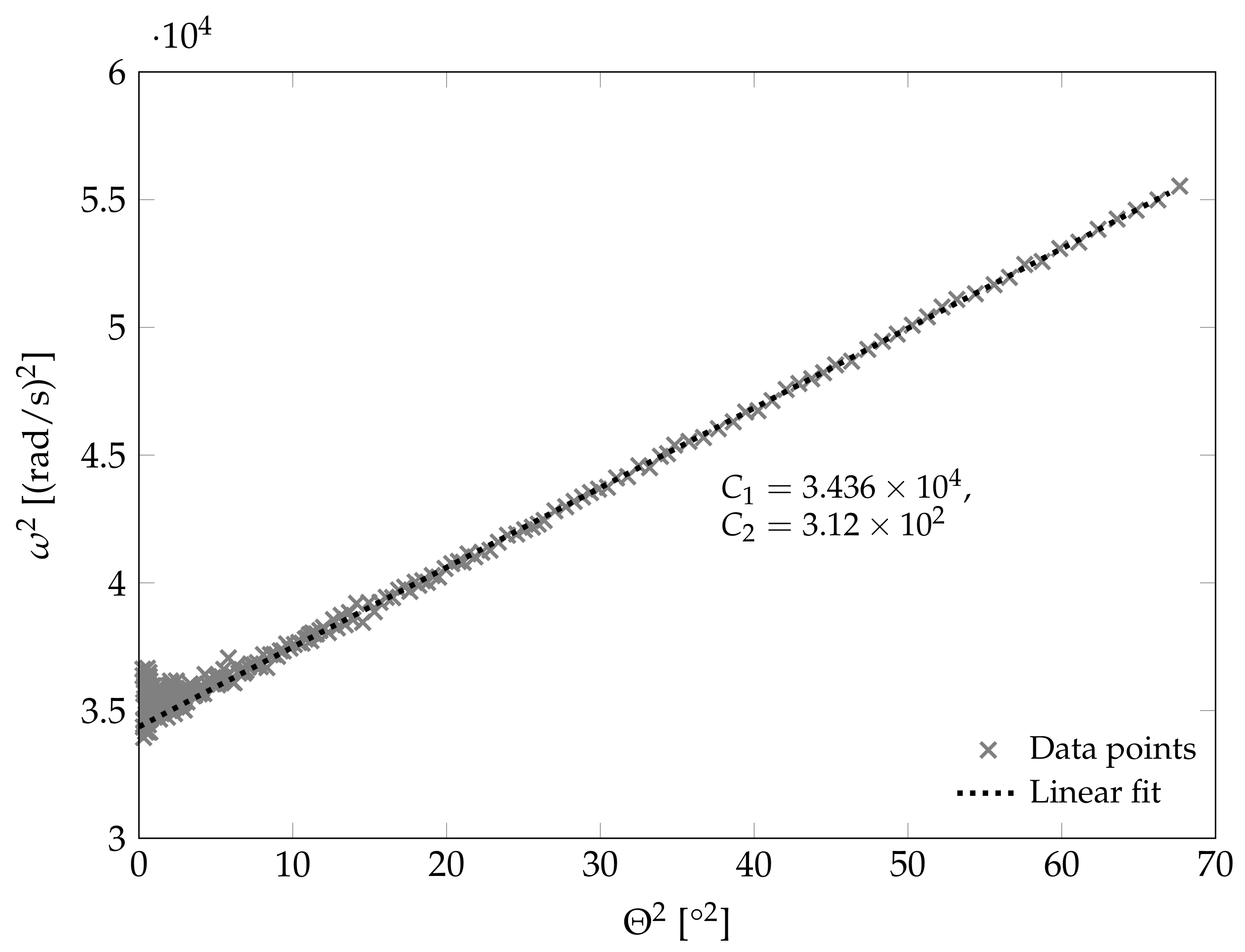
4.1. Frequency Determination
To calculate the nonlinear correction factor
in the logarithmic decrement (Equation (
2)), the stiffness coefficients
and
are needed. The relation [
18]:
between the oscillation frequency
and amplitude
allows the determination of both coefficients through a linear least-squares fit. The frequency is determined through the time between the zero crossings of the measured pitching angle. For the least-squares fit the data points are also weighted by the point density. An example for this linear fit is shown in
Figure 6.
Based on the stiffness coefficient
a reference oscillation frequency,
can be calculated with
being the average stiffness coefficient over all wind-on tests at the same conditions. This frequency can be influenced by adjusting the tensioning force of the front and rear wires. In addition, the model’s aerodynamic properties, especially the pitching moment coefficient
as well as the aerodynamic load on the wires also have a significant influence on the frequency.
is a reference value used for comparing test cases. The actual oscillation frequency however also depends on the cubic stiffness coefficient
and the oscillation amplitude (see Equation (
6)) and is usually underestimated by
.
4.2. Wire Damping Model
The presence of the wires has a small but non-negligible influence on the damping measurements. This effect can be quantified using a model that incorporates drag coefficient measurements for a cylinder in cross-flow. Extensive experimental data for
are available in the literature [
21]. There are no data available for the combination of high Mach numbers and low Reynolds numbers as it occurs in this setup. However, several studies have found the influence of the Reynolds number to be small at transonic and supersonic Mach numbers [
22,
23].
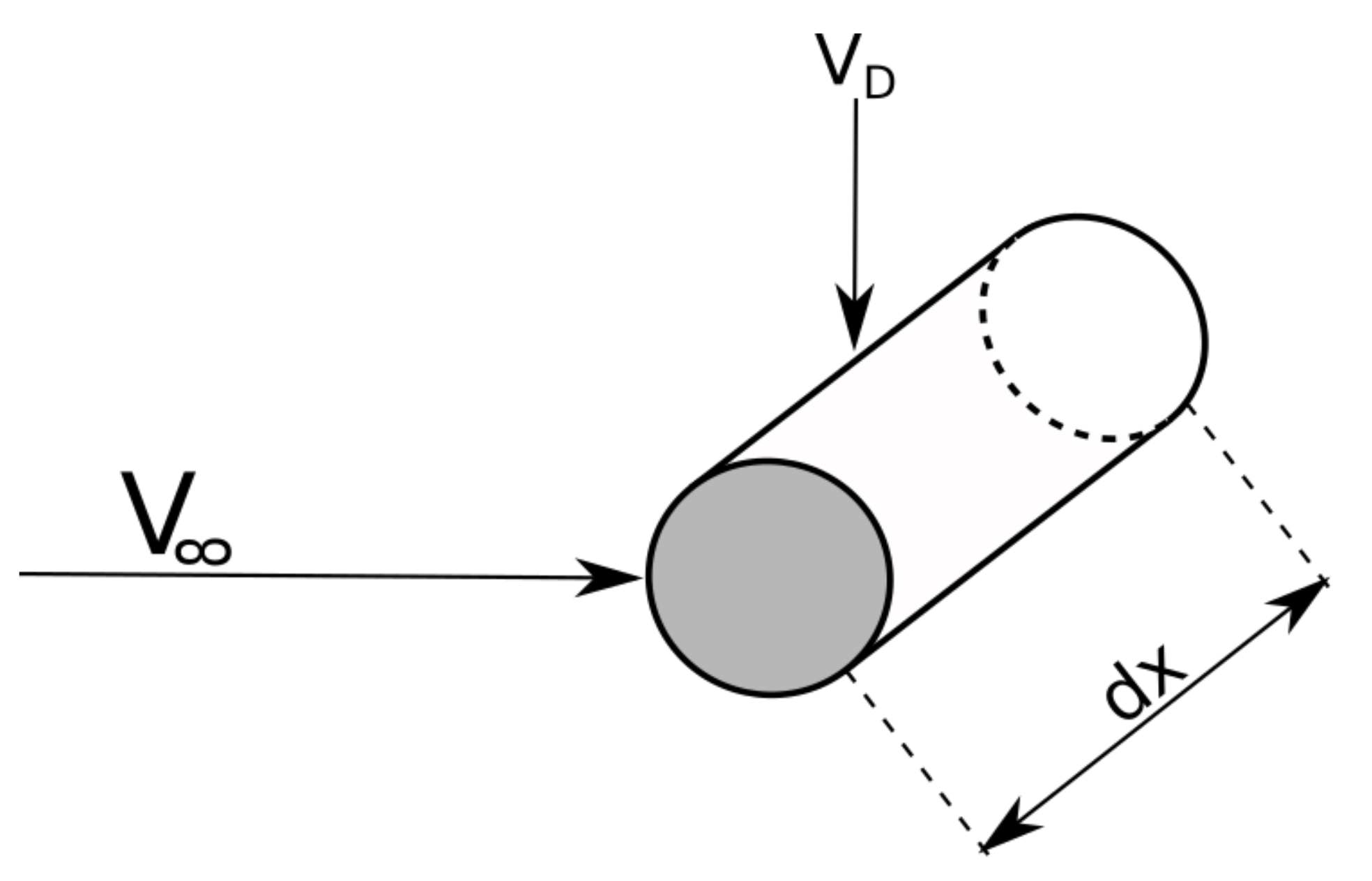
The four central wires have no significant motion during the decaying oscillation, thus their damping contribution can be neglected. The drag force
exerted on an infinitesimally short wire segment of length
is:
with the wire diameter
and the free-stream dynamic pressure
. The only part of
contributing to
is the one acting along the direction of motion of the wire. For small angles this can be approximated by:
with
being the velocity of the infinitesimal wire element.
b is the distance between the wire attachment point on the model and the model’s center of rotation,
x is the position of the infinitesimal element along the wire and
L the total wire length. The wire element is sketched in
Figure 7. Integrating
along
x gives:
with
being 0 at the wall attachment point and linearly increasing towards the model,
has a triangular shape. Thus, the load taken on on the model side (as opposed to the wall) is
of the total load. With the four wires in the horizontal plane all equally contributing, the wire damping moment is:
Using the expression:
the wire contribution to the stability derivative is calculated as:
This part is subtracted from the result determined by Equation (
4) with the data for
taken from [
21].
5. Numerical Investigation
As a reference in addition to the data found in the literature, a numerical study is conducted to determine values for
for the two models investigated. The transient planar pitching method described in [
14] is used to determine the coefficient sum. Additional calculations are done using a modification of the Lunar Coning method introduced in [
24] which uses a combined coning and spinning motion to eliminate the contribution of the Magnus moment. As this method is limited to axisymmetric models, it is applied solely to the ANSR model.
All CFD calculations are performed with the commercial Ansys
® Fluent software [
25].
5.1. Transient Planar Pitching Method
In this approach a constant small-amplitude oscillation defined by the equation:
with the constant amplitude
and the oscillation frequency
is imposed on the model. In an unsteady RANS simulation, the pressure- and shear forces on the model surface are recorded over several periods to determine the pitching moment coefficient
at every time step. In a properly converged calculation
follows the equation:
with the pitching angle
and the pitch rate
. As only low-amplitude oscillations (
) are considered, the coefficients
and
are regarded as constant. When plotted over the pitching angle
, Equation (
16) describes an elliptic shape, as shown in
Figure 8.
By evaluating the values
and
at the points where the sine term in Equation (
15) equals 0, the pitch damping moment coefficient sum can be calculated using the relation:
with the non-dimensional frequency
. This method is implemented in Fluent by defining a
User-defined Function (UDF) that moves the reference frame according to Equation (
15), thus changing the angle of attack over time.
5.2. Combined Coning and Spinning Method
The Lunar Coning motion [
26] is characterized by a rotation of the model at incidence greater zero around an axis defined by the vector of the incoming flow and the model moment reference point. Thus, the same side of the model is facing the rotation axis at all times, hence the description ’lunar’. Although a combination of transient roll, pitch and yaw motions, it results in a steady flow field in the body-fixed reference frame. This fact makes this method well suited for numerical investigations. The non-dimensional coning rate
is defined as:
The expression for the yaw moment coefficient for this flow state (
) is
For symmetrical configurations like the ones investigated in this study this can be simplified with
and
. The rates
p and
r can be calculated from the coning rate
:
Substituting (
20) in (
19) then leads to an expression for the desired coefficient sum:
with the Magnus moment coefficient
, which has to be determined in a separate calculation. As it is small compared to the other terms, it can also be neglected in a first approximation.
A modification [
24] allows the direct determination of
. For this the Magnus moment caused by the rotation
needs to be neutralized by a counter-rotation
around the model axis with
. However, this modification can only be applied to axisymmetric bodies as otherwise a transient simulation would be necessary, negating the advantage of the Lunar Coning method. For this reason, these simulations are limited to the ANSR model in the present study. The method can be used in Fluent by modifying the no-slip wall boundary condition such that the fluid velocity at the wall equals the local rotational velocity. The main coning motion is implemented by defining a rotating reference frame.
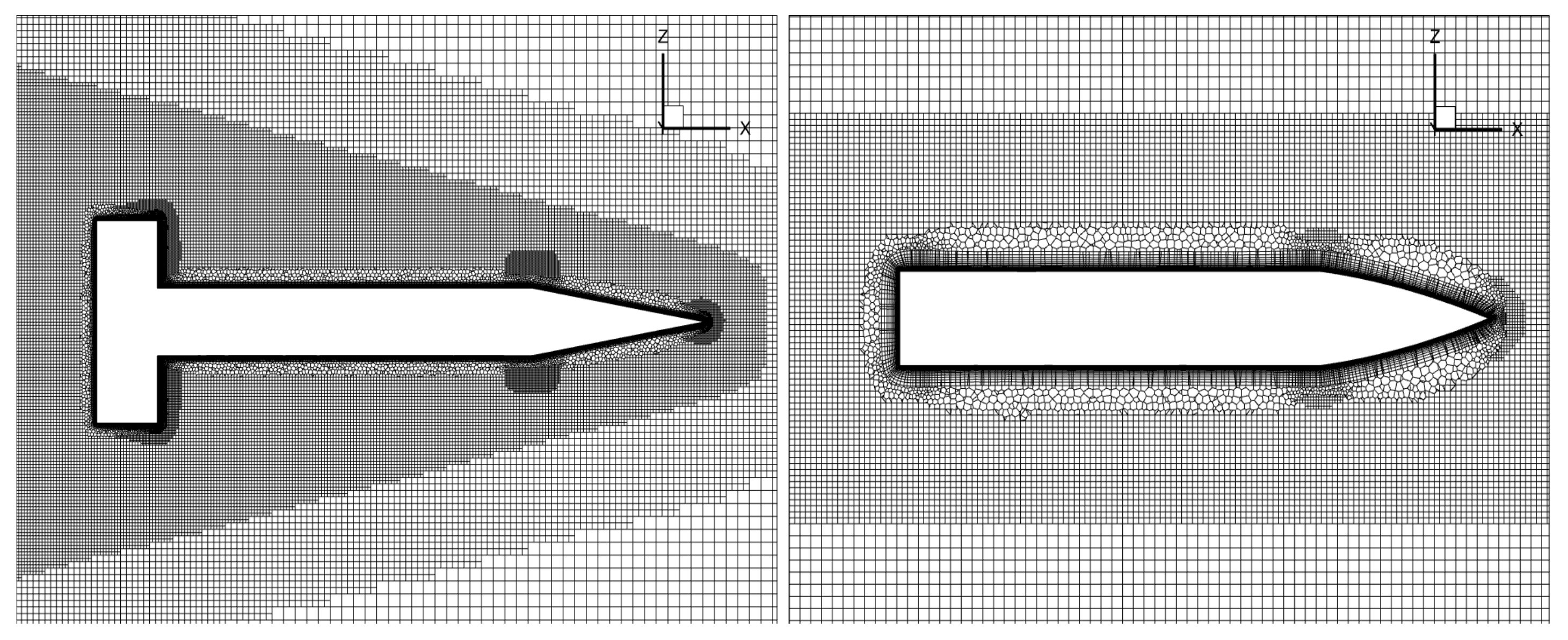
5.3. Numerical Setup
Meshes for both models were created with the Fluent meshing tool. For both models, cylindrical computational domains were used, which extended 250 model diameters downstream of the model. The cylinder radius and the upstream extension were set to 150
D. The ANSR mesh consists of
cells, the Basic Finner requires some additional refinement due to the fins, its mesh consists of
cells. Cut plane sections showing the model outlines for both meshes are shown in
Figure 9.
A mesh independence study was performed for both models at a Mach number of 0.8 using the transient planar pitching method. The resulting value for obtained on a coarser (ANSR: , Basic Finner: ) and a finer (ANSR: , Basic Finner: ) mesh were compared to the one obtained on the calculation mesh. The deviations were below 3% on the coarser meshes and below 1% for the finer meshes.
The flow equations are discretized using second-order upwind schemes and are solved with Fluent’s pressure-based solver. The k--SST turbulence model is used. The farfield conditions are chosen based on the flow conditions in the ISL wind tunnel.
For the transient planar pitching method, a non-dimensional oscillation frequency of
is used, the oscillation amplitude is set to
. The simulation time step is chosen such that there are at least 200 time steps per oscillation period, each time step involving 40 inner iterations. These parameters are chosen based on the parameter study conducted in [
14] as well as an own parameter study conducted within the scope of this project.
For the modified Lunar Coning method, the coning rate is set to 0.05 and the angle of attack to 3 . The influence of these parameters was also characterized in a parameter independence study.
7. Conclusions
A wire suspension approach for measuring the pitch damping moment coefficient sum at transonic and low supersonic Mach numbers has been developed. The method minimizes support interference and eliminates the need for expensive measurement equipment integrated into the model. The evaluation process is based on the logarithmic decrement method and accounts for nonlinear terms in the equation of motion. The mechanical damping influence of the wire suspension is determined by the same evaluation process in a tare run without flow. Afterwards, the mechanical damping is used for calculating the aerodynamic damping from the total damping measured at wind-on conditions.
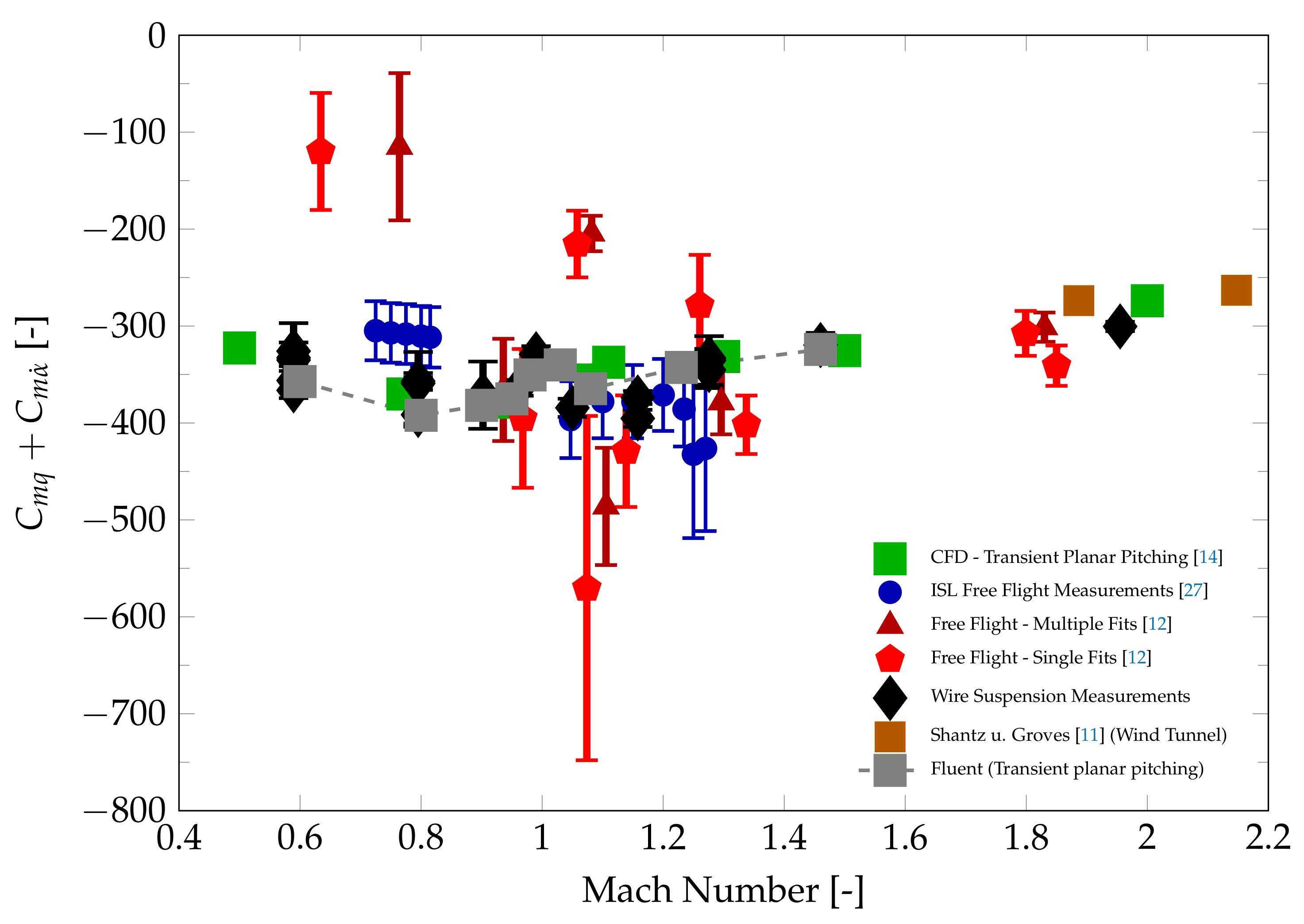
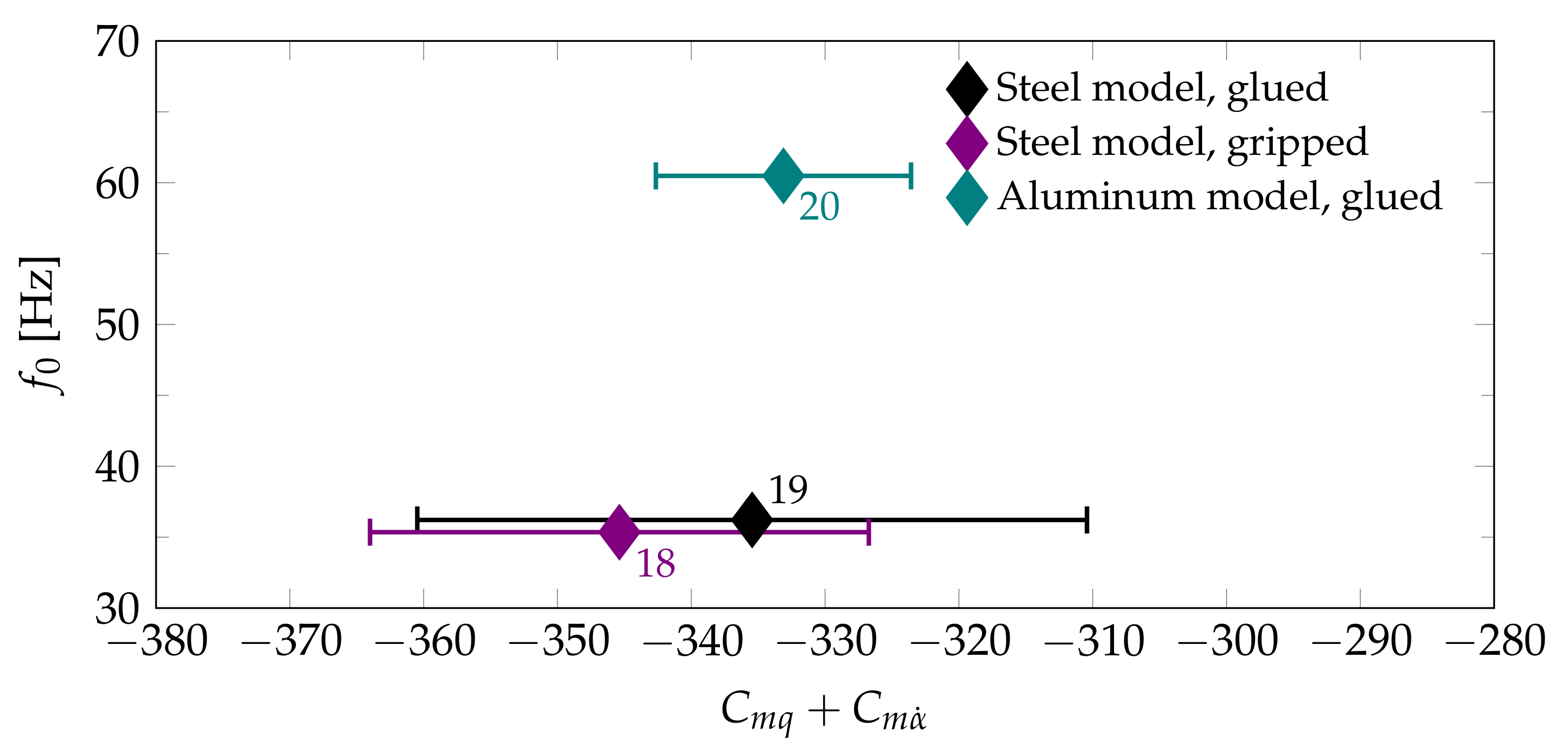
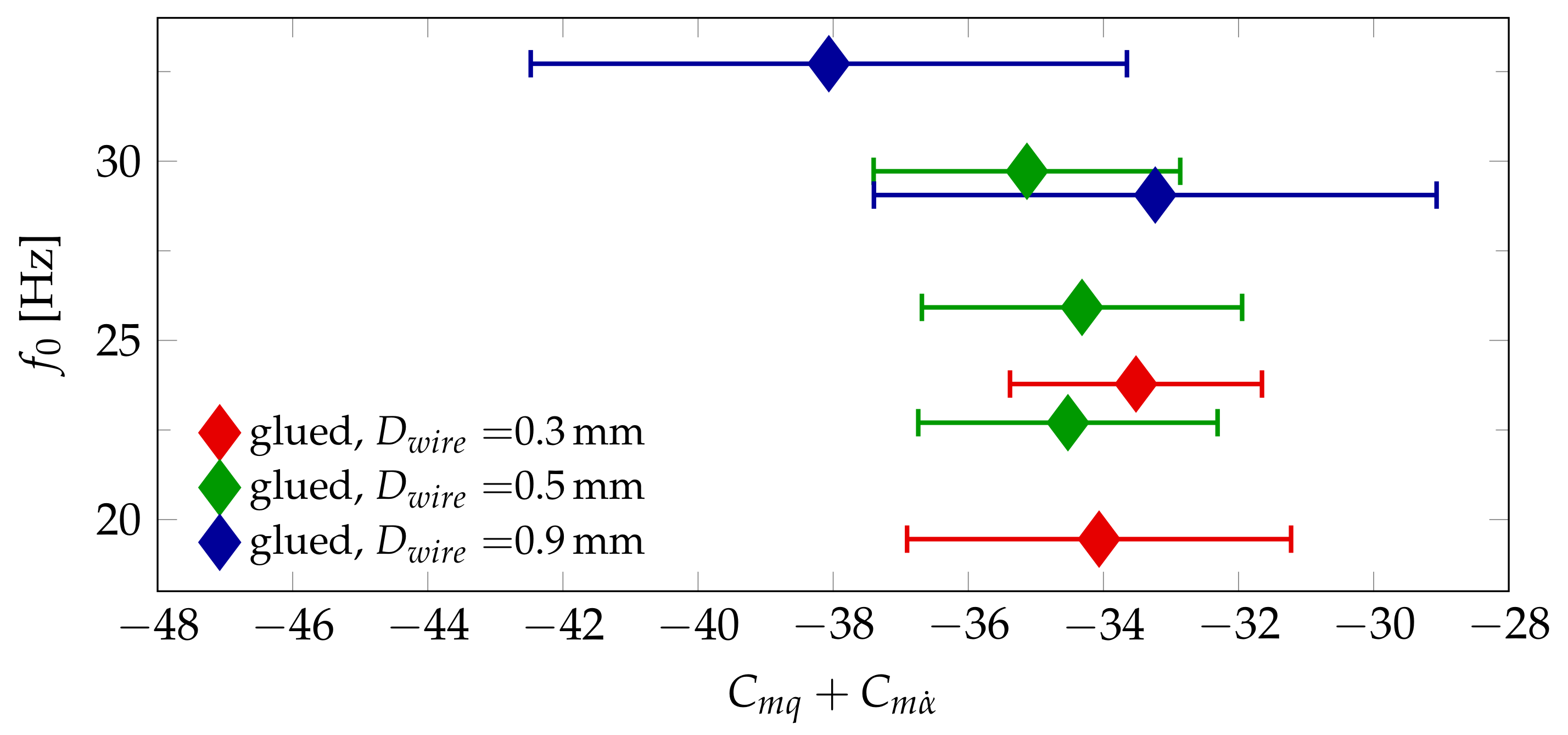
Within an extensive wind tunnel campaign, the presented method has been used to investigate the Basic Finner and ANSR reference models. Their pitch damping coefficients have been measured for Mach numbers ranging from 0.6 to 2. In addition, the influence of oscillation frequency, static pressure, the wire attachment method and the wire thickness has been evaluated.
The results show good quantitative agreement for both models with free-flight and CFD data from the literature. In addition, qualitative effects like the increase of with increasing Mach number below Mach 1 as described in the literature are also observable in the present wind tunnel measurements. The wire attachment method and the wire thickness have a small influence, which is nevertheless significant for the ANSR model due to the small magnitude of in that particular case.
Overall, the presented method shows significantly improved accuracy, rendering it a feasible method to determine pitch-damping coefficients in a small-scale supersonic wind tunnel. Therefore, it can help to extend the experimental database for projectile configurations.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}