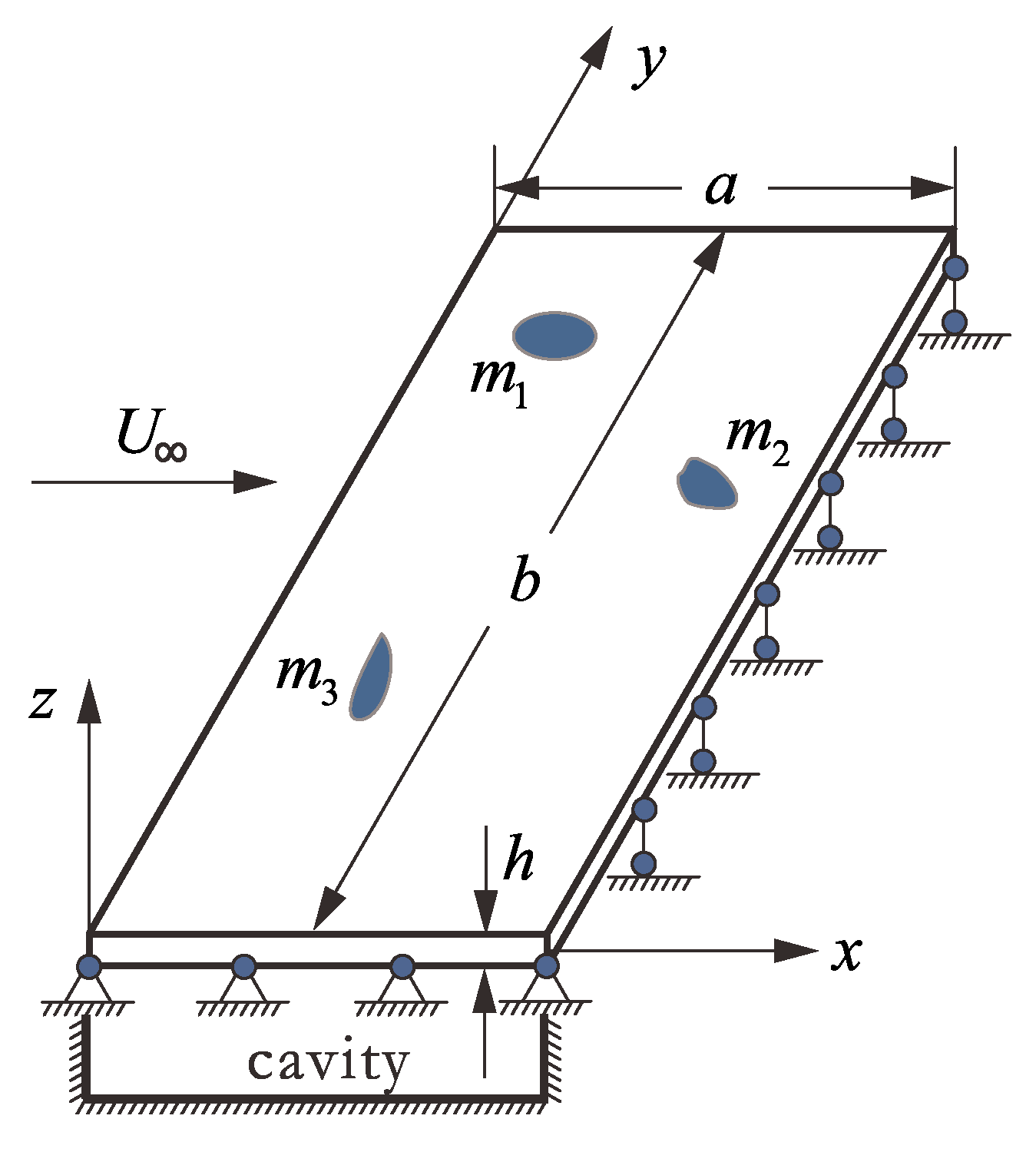
The square panel in a wing structure shown in
Figure 2 is simply supported on four sides when flying at supersonic speed. The side length is
mm and the thickness is
mm. The physical parameters of the panel are shown in
Table 1 [
27,
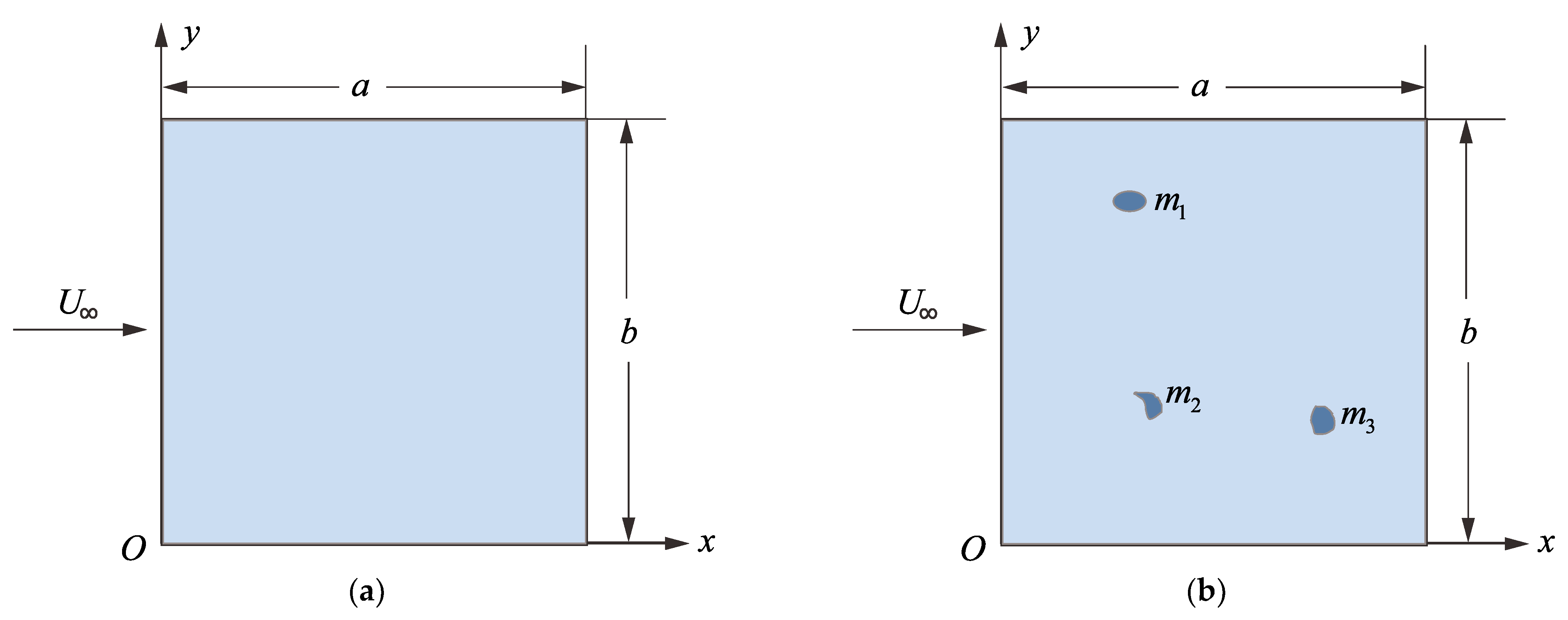
28]. In the preliminary flutter calculation process, it is considered that the panel has no mass attachment, as shown in
Figure 2a. Then, we start from
Section 6.1 to consider the case of several mass attachments attached to the panel, as shown in
Figure 2b. Generally, the shapes of the mass attachments are irregular. However, since their characteristic sizes are much smaller than the surface area of the wall panel, it is generally considered as concentrated mass points in this paper. The positive direction of the
x-axis is the direction of the airflow. When the aircraft is flying near sea level, the air density is taken as
kg/m
3, and the air density ratio is taken as
.
Figure 3 shows the variation in the flutter velocities and flutter frequencies of the panel with the number of truncated modes when
. It can be seen from
Figure 3 that at least the first 15 natural modes of the panel structure should be taken to participate in the flutter calculation in order to obtain the correct flutter velocity and frequency. Therefore, the first 16 modes are taken to participate in the flutter calculation of the panel in order to reduce the calculation efforts while ensuring the calculation accuracy. So, taking the first 16 order modes (namely
,
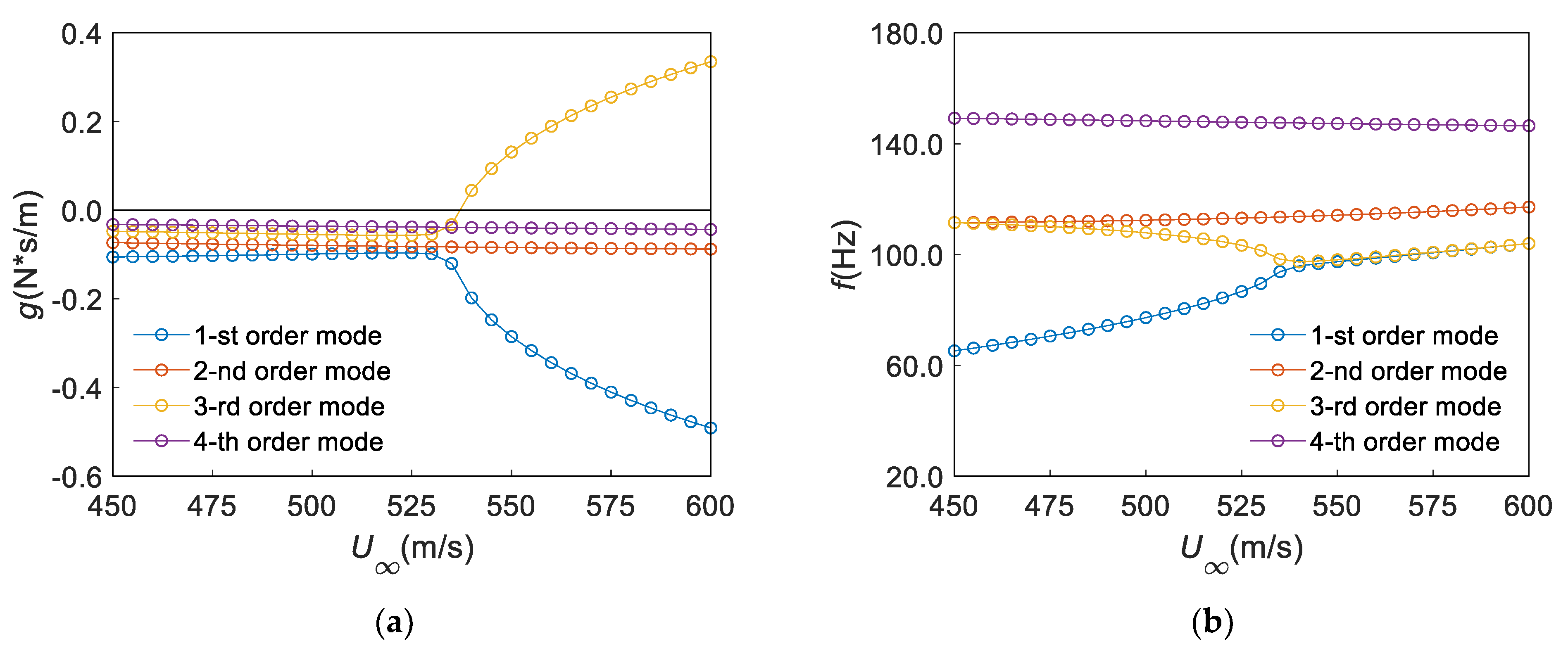
in Equation (6)) of the panel to participate in the flutter calculation and ignoring the structural damping, the nonmatching flutter velocity of the panel is calculated under
, as shown in
Figure 4. It can be seen from
Figure 4 that the flutter velocity and flutter velocity calculated by the program proposed in this paper are
m/s and
Hz, respectively. Flutter occurs in the second mode. It can be seen from
Figure 4b that the first mode and the second mode are coupled when flutter occurs. In addition, we can also obtain the slope of the third mode when
in
Figure 4a as an index to evaluate the suddenness of entering flutter. Here, the index is called the flutter slope and is denoted as
. Here,
in the case of no mass attachment. As a comparison, the same problem can be solved with the Nastran code. The results using the Nastran software (
p-
k method) are
m/s,
Hz [
27]. The flutter velocity and the flutter frequency differ by 0.41% and 0.30%, respectively, and the flutter shape is the same as that calculated in this paper. For convenience, in the following sections, we denote the case without mass attachment as NP.
6.1. The Case of Only One Mass Attachment
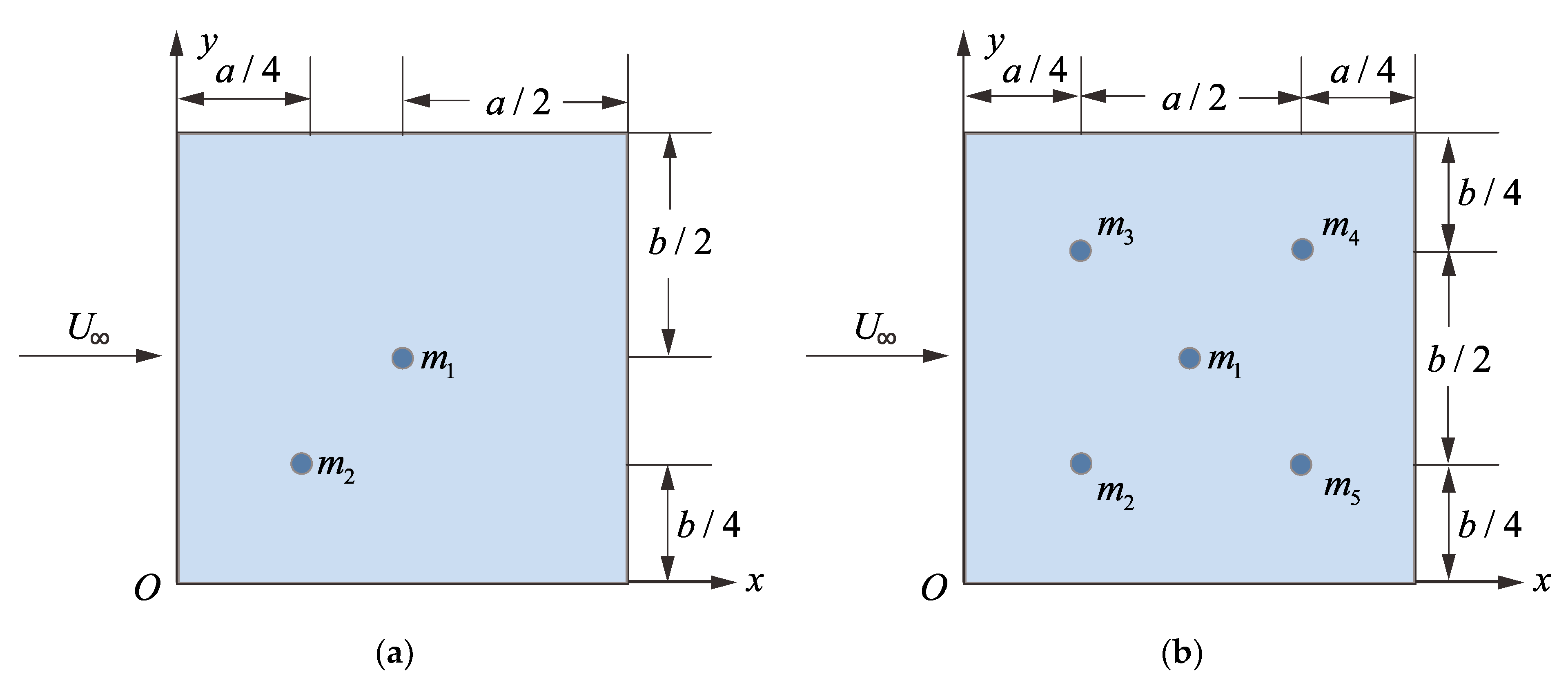
In this section, we consider the case of only one mass attachment on the panel. The mass of the attachment is 0.03 kg (about 1/10 of the mass of the panel). When it is located at different positions, it will have different effects on the flutter characteristics of the panel. To this end, we first consider two situations. One is that the mass attachment is located at the center of the panel, as shown in
Figure 5a. The other is that the mass attachment is located at the intersection point of 1/4 chord length and 1/4 span, as shown in
Figure 5b. For convenience, the two different cases are denoted as CP and QP, respectively. Using the method proposed in this paper, the flutter velocities and flutter frequencies of the panel under the two cases are calculated, as shown in
Figure 6 and
Figure 7.
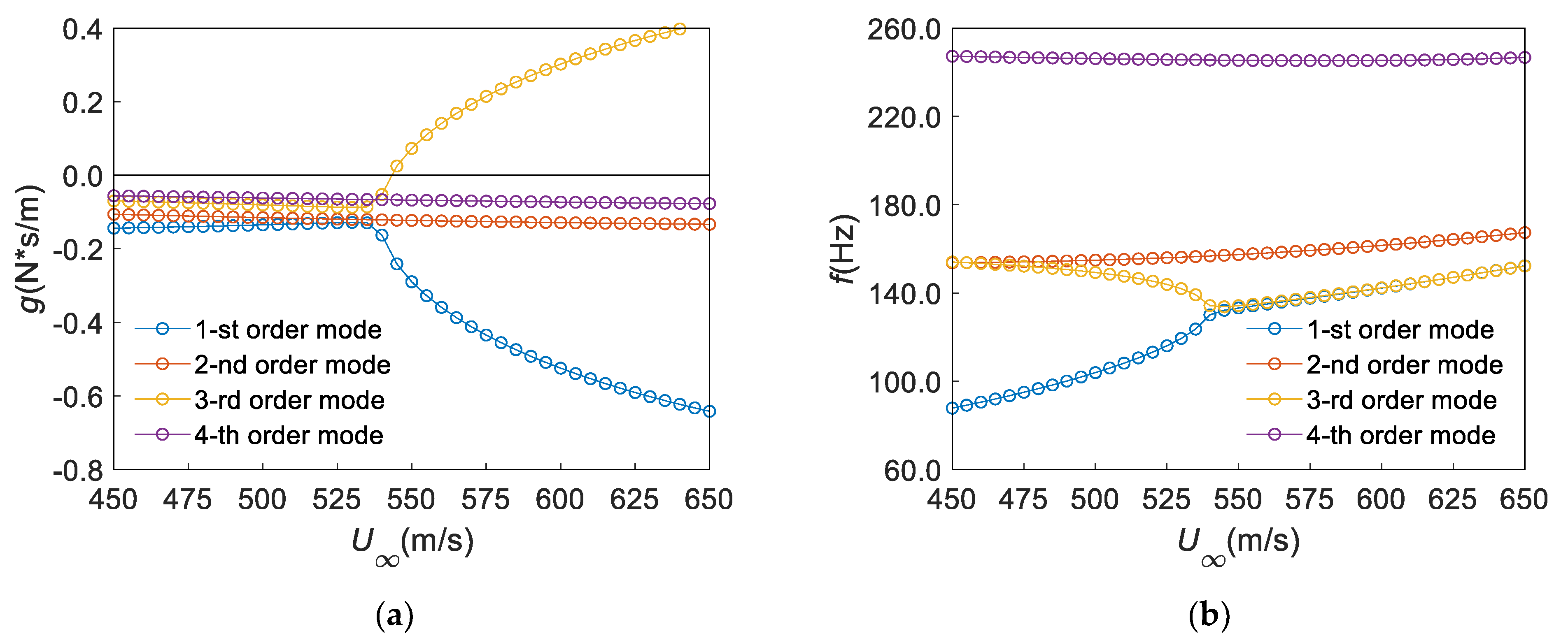
It can be seen from
Figure 5 that the flutter velocity and the flutter frequency in the case of CP are 602.2 m/s and 125.4 Hz, respectively. It should be noted that the flutter mode jumps from the second mode to the first mode, but when flutter occurs, the first mode and the second mode are also coupled. Compared with the case of NP, the flutter velocity was increased by about 10.82%. However, the flutter frequency decreased by 6.35%. Additionally, the flutter slope became 0.0073 and the suddenness decreased by 52.90%.
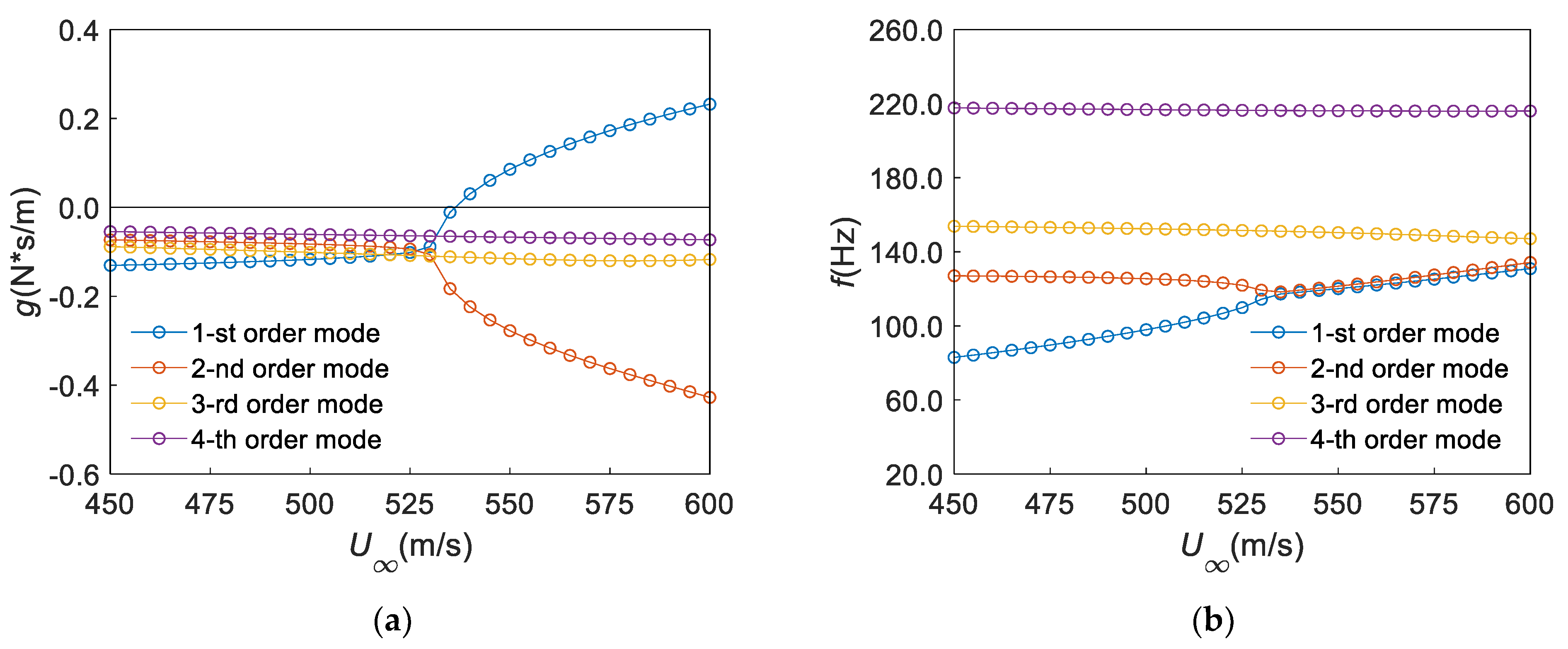
When the mass attachment is located at QP, the corresponding flutter velocity and the flutter velocity as shown in
Figure 7 are 536.3 m/s and 117.5 Hz, respectively. Flutter occurs again at the first mode. When flutter occurs, the first mode is coupled with the second mode. At the same time, the flutter slope can be obtained as 0.0083, which is slightly higher than the case of CP, but still 46.5% smaller than the case of NP.
From
Figure 6 and
Figure 7, it can be concluded that when a mass attachment is added to the panel, the change in the flutter characteristics (flutter velocity, flutter frequency and flutter slope) is closely related to the position of the mass attachment. In particular, the flutter velocity may increase or decrease. This is actually a challenge to the design of the panel structure, which needs to be taken seriously.
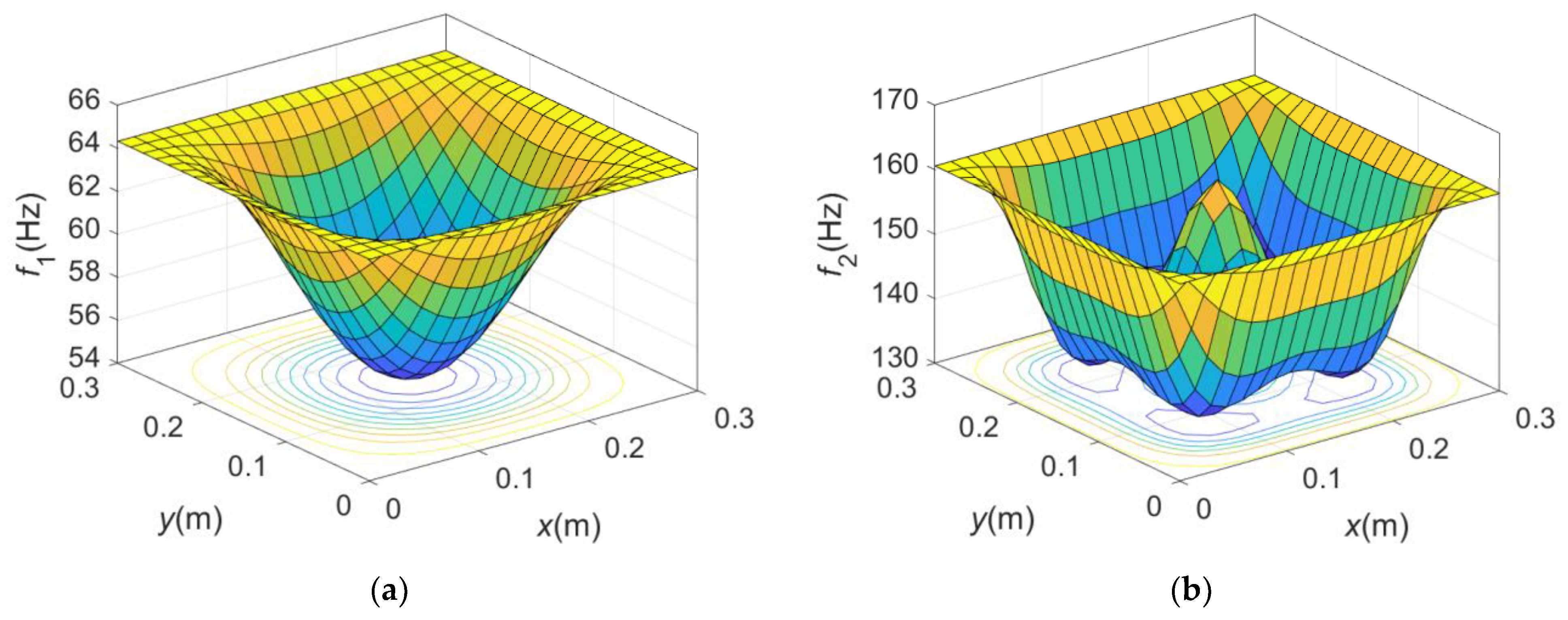
In order to further understand the influence of the location change in the mass attachment on the natural properties and flutter characteristics of the panel, we drew the changes in the first four natural frequencies with the location
of the mass attachment in
Figure 8. It can be seen from
Figure 8 that the first, second and fourth natural frequencies
,
and
of the panel all decreased to varying degrees due to the mass gain brought by the attachment. However, the laws of decreasing are different. It can be seen from
Figure 8a that the closer the mass attachment is to the center of the panel, the lower the first order natural frequency. Compared with the case of NP, the maximum decreasing amplitude is up to 10.29 Hz. In addition, we can also observe that there is only one minimum point (namely the center point) in the first order natural frequency image. However, both the second order and the fourth order natural frequency images evolve into four extreme regions. The difference is that there is a connected area in the
image, while the
image is divided into four independent areas by the symmetry axis of the panel. It can be observed from
Figure 8b that when the mass attachment is located near the center of the panel, the second order natural frequency has a higher value. Additionally, it can be seen from
Figure 8d that when the mass attachment is near the symmetry axis of the panel, the fourth order natural frequency is almost equal to that in the case of NP.
Interestingly, it can be seen from
Figure 8c that the value of the third order natural frequency
remains constant no matter how the position
of the mass attachment changes. Further study shows that this phenomenon also occurs at the 8th and 10th natural frequencies. The reason is that when solving the generalized eigenvalue problem, the integral value of the modes corresponding to these frequencies in the domain is 0, which is related to the orthogonality of the modes.
Furthermore, we drew the changes in the flutter characteristics of the panel with the location
of the mass attachment in
Figure 9. It can be seen from
Figure 8a that the variation in the flutter velocity
with the position
of the mass attachment is complex. In the central region of the panel, the flutter velocity shows a large gradient trend. At the center point of the panel,
is at the maximum state. However, at a slight deviation from the center point,
drops sharply to the minimum point. The variation amplitude of the flutter velocities reaches 87.7 m/s. However, a different variation pattern appears in the flutter frequency image, as shown in
Figure 9b. The flutter frequencies of the panel decrease compared with the NP case, except that the mass attachment is located on the central axis of the panel in the direction of air flow and is not near the central area of the panel. Similar to the case of the flutter velocity, the flutter frequency also changes dramatically, with a difference of 37.5 Hz between the maximum and minimum values.
On the other hand, in order to investigate the changes in the flutter characteristics caused by the change in the attachment mass, the changes in flutter speed
and flutter frequency
with
under the case of CP and QP are shown in
Figure 10. It can be seen from
Figure 10 that under the case of CP, both the flutter velocities and flutter frequencies have transitions at
. This is due to the flutter mode jump. When
, the flutter velocity increases linearly with the increase in
. After the jump,
decreases monotonously and shows a nonlinear trend. Until
(equivalent to the mass of the panel
), the flutter velocity decreases to 459.3 m/s. Compared with the case of NP, the flutter velocity decreases by 84.1 m/s, and the change rate reaches 15.48%. However, it can be observed from
Figure 10b that the changes in flutter frequencies are different to those of flutter velocities. Flutter frequencies decrease with the increase in
whether before or after the flutter mode jumps. The gain in the flutter frequency due to the mode jump reaches 87.0 Hz (from 108.3 Hz to 195.3 Hz).
Different from the case of CP, the flutter mode jump occurs near in the case of NP. The flutter velocity is nonmonotonic when , and the minimum value appears near . In contrast, flutter frequencies decrease monotonically and basically change linearly. However, flutter velocities and frequencies become insensitive to the change in after the flutter mode jumps.
That is, when the mass of the attachment on the panel changes (such as the accumulation of the ice load on the panel), the flutter characteristics of the panel will change greatly due to the jump in the flutter mode. These will also bring a serious threat to the safety of the panel structure and bring challenges to the design of the panel structure.
6.2. The Case of Two or More Mass Attachments
When there are two or more mass attachments on the panel, each attachment contributes to the quality attributes of the panel. The inherent properties of the panel will change under the joint influence of these attachments and then affect the panel’s flutter characteristics. Only two new cases are considered here to avoid complexity, as shown in
Figure 11. The first case is the combination of the case of CP and the case of QP, here called the case TP, as shown in
Figure 11a. The other case, which is called MP, includes five mass attachments, whose positions are shown in
Figure 11b.
The flutter velocities and flutter frequencies of the panel in the case of TP and MP are shown in
Figure 12 and
Figure 13, respectively. It can be seen from
Figure 12 that the flutter velocity of the panel is 574.0 m/s, the flutter frequency is 111.8 Hz and the flutter slope is 0.0119. The flutter occurs in the first mode of the panel. When flutter occurs, the first mode is coupled with the second mode. Similarly, it can be seen from
Figure 13 that the flutter velocity of the panel is 537.1 m/s, the flutter frequency is 97.92 Hz and the flutter slope is 0.0155. However, the flutter occurs in the second mode of the panel, which is coupled with the first mode when flutter occurs.
A comparison of the flutter characteristics of the panel under different cases (NP, CP, QP, TP and MP) are listed in
Table 2. It can be seen from
Table 2 that the flutter velocity in the case of TP is between that in the case of CP and QP. This is because the existence of a mass attachment can increase the flutter velocity of the panel in the case of CP, while it decreases the flutter velocity in the case of QP. Their contributions to the flutter velocity are reconciled when the two mass attachments exist. As the number of mass attachments increases, the flutter velocity of the panel continues to decrease. Coincidentally, the flutter velocity under the case of MP is roughly the same as that under the case of QP.
Different from the flutter velocity, the flutter frequency in the case of MP is the minimum in all the considered cases. This means that as the number of mass attachments on the panel increases, the flutter frequency of the panel gradually decreases. Unfortunately, we cannot draw conclusion that the more mass attachments there are and the greater the mass, the lower the suddenness of entering the flutter state. In fact, the suddenness of entering the flutter state is related to the mass distribution of the panel.
6.3. Flutter Characteristics with Dampers
According to the results in
Section 6.1 and
Section 6.2, we know that the flutter characteristics, especially the flutter velocities of the panel, may be decreasing or increasing depending on the positions and masses of attachments. However, the flutter velocity envelope is determined when the design of the panel is finalized. In the subsequent use, the inherent properties of the panel will change if there are mass attachments on the panel. Additionally, the flutter velocity and frequency will also change. It will seriously threaten the safety of personnel and aircraft if the flutter velocity of the panel drops too much. Therefore, some measures should be taken to maintain or even improve the flutter characteristics even when there are mass attachments on the panel after the panel is designed and finalized. It can be seen from Equation (38) that the existence of damping in the structural system can effectively change the solutions of the eigenvalue problem. This is because the damping in the structure will constantly absorb the energy generated by the self-excited vibration of the panel, so that a larger flow speed is required to maintain the simple harmonic motion state. So, it is a feasible solution to place some dampers at the position where the vibration velocity is the largest. According to the deformation theory of the Kirchhoff plate, the lower-order main vibrations
of the panel are dominant when flutter occurs. The corresponding vibration modes are also the main components of the panel deformation. Therefore, for the
i-th order main vibration
of the panel, the velocity maximum point actually corresponds to the displacement maximum point on the mode shape. That is to say, we can obtain the position of the damper required by analyzing the position of the maximum relative displacement point on the lower-order vibration modes. However, the trouble is that it is difficult for us to determine the locations, numbers and masses of attachments in advance during the use of a panel. Fortunately, it can be seen from Equation (14) that the vibration mode of the panel with mass attachments can be obtained by the superposition of the vibration modes of the panel under the case of NP. Therefore, as a preset method, we can configure corresponding damping points under the case of NP in advance and expect them to effectively improve the flutter characteristics of the panel in the presence of mass attachments. Based on this idea, we provided the first four mode shapes of the panel structure under the case of NP in
Figure 14.
As can be seen from
Figure 14, there are five displacement extreme points in the first three modes and nine in the first four modes. On the other hand, according to the flutter analysis in
Section 6.1 and
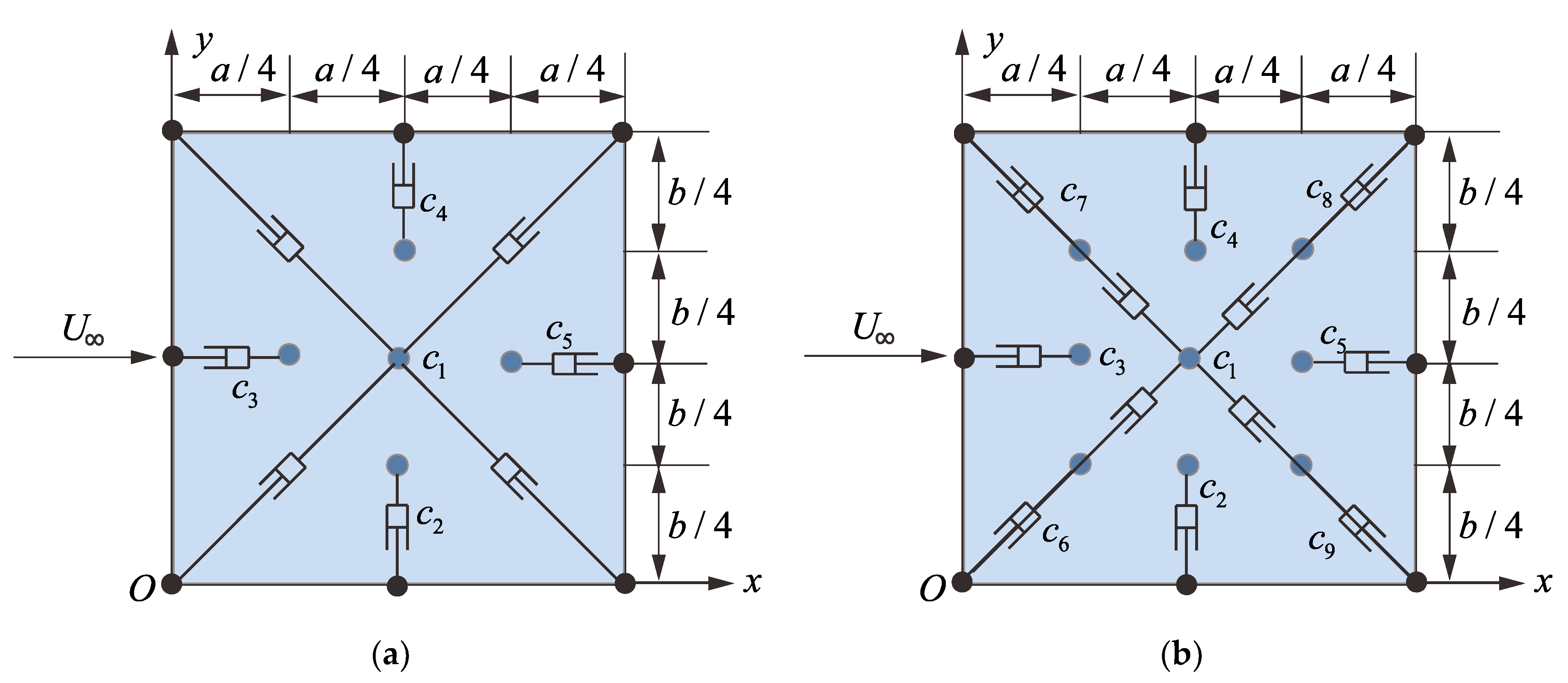
Section 6.2, the flutter of panels with and without mass attachments occurs in the first three modes. Therefore, we propose two damper configurations to suppress panel flutter. One is arranging the dampers at the positions determined by the maximum displacement points from the first mode to the third mode, while the other is arranging the dampers at the positions determined by the maximum displacement points from the first mode to the fourth mode. The two damper configurations are called the 5P method and 9P method, respectively as shown in
Figure 15.
In practical engineering applications, the boundary of the panel is often firmly connected to the frame, beam, rib or stringer through rivets, bolts, etc. Points on the boundary of the panel are generally considered to be in a simply supported state with displacements of 0. When an internal point of the panel is displaced under the action of air flow, an additional displacement difference is generated between a boundary point and the internal point of the panel. A velocity difference is then generated, which can be used to design a damper. Therefore, a light linear damper can be arranged between a damping configuration point of the panel and a boundary point or a panel corner point in advance, as shown in
Figure 16. In
Figure 16a, the artificial damping coefficients
,
,
and
are all realized by setting a linear damper between the damping configuration point and a boundary point. Additionally, the damping coefficient
can be achieved by connecting the corner points of the panel with four dampers. However, in the configuration of the 9P method, the additional artificial damping coefficients
,
,
and
can be achieved by connecting the damping configuration points and the four corner points, as shown in
Figure 16b.
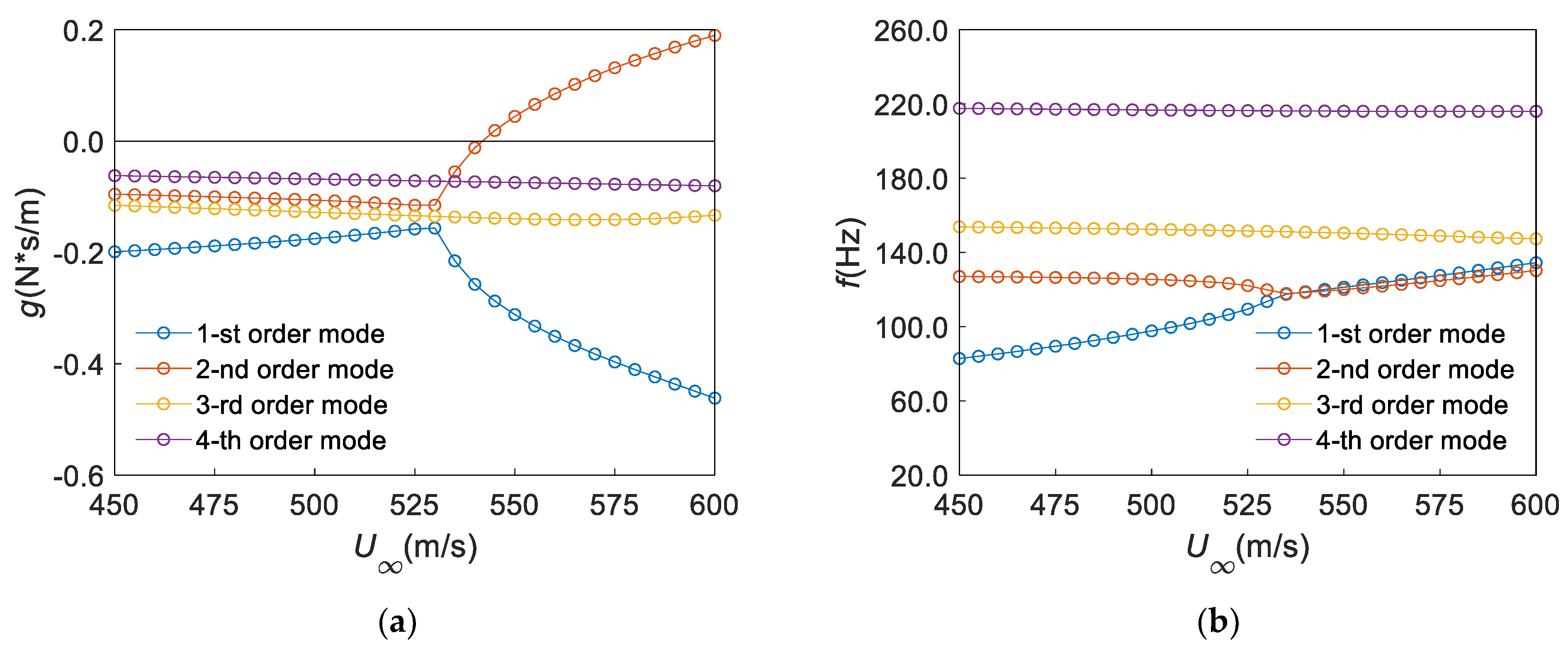
The case of QP is taken as an example to show the enhancement effects of the flutter characteristics of the panel with dampers. In this paper, only a simple case is considered, that is, the damping coefficients of the dampers arranged in advance are the same. First, let the damping coefficient
to obtain the flutter velocities and flutter frequencies of the panel in the case of QP calculated based on the 5P method and the 9P method, respectively, as shown in
Figure 17 and
Figure 18. It can be seen from
Figure 17 that the flutter velocity of the panel based on the 5P method is 541.9 m/s, and the flutter frequency is 118.7 Hz. The flutter occurs in the second mode of the panel. When flutter occurs, the second mode is coupled with the first mode. However, it can be seen from
Figure 17 that the flutter velocity of the panel is 545.2 m/s and the flutter frequency is 118.5 Hz. The flutter occurs in the first mode of the panel which is coupled with the second mode when flutter occurs. By comparing the flutter frequency curves shown in
Figure 17b and
Figure 18b, it can be seen that the results obtained by the five-point method and the nine-point method are basically the same.
Compared with the case of QP without damper, the flutter velocity of the panel based on the 5P method was increased by 5.6 m/s, with an increase rate of 1.04%. The flutter velocity of the panel based on the 9P method was increased by 8.9 m/s, with an increase rate of 1.66%. Similarly, the flutter frequency of the panel also increased. The flutter frequencies based on the 5P method and the 9P method were increased by 1.2 Hz and 1 Hz with an increase rate of 1.02% and 0.85%, respectively.
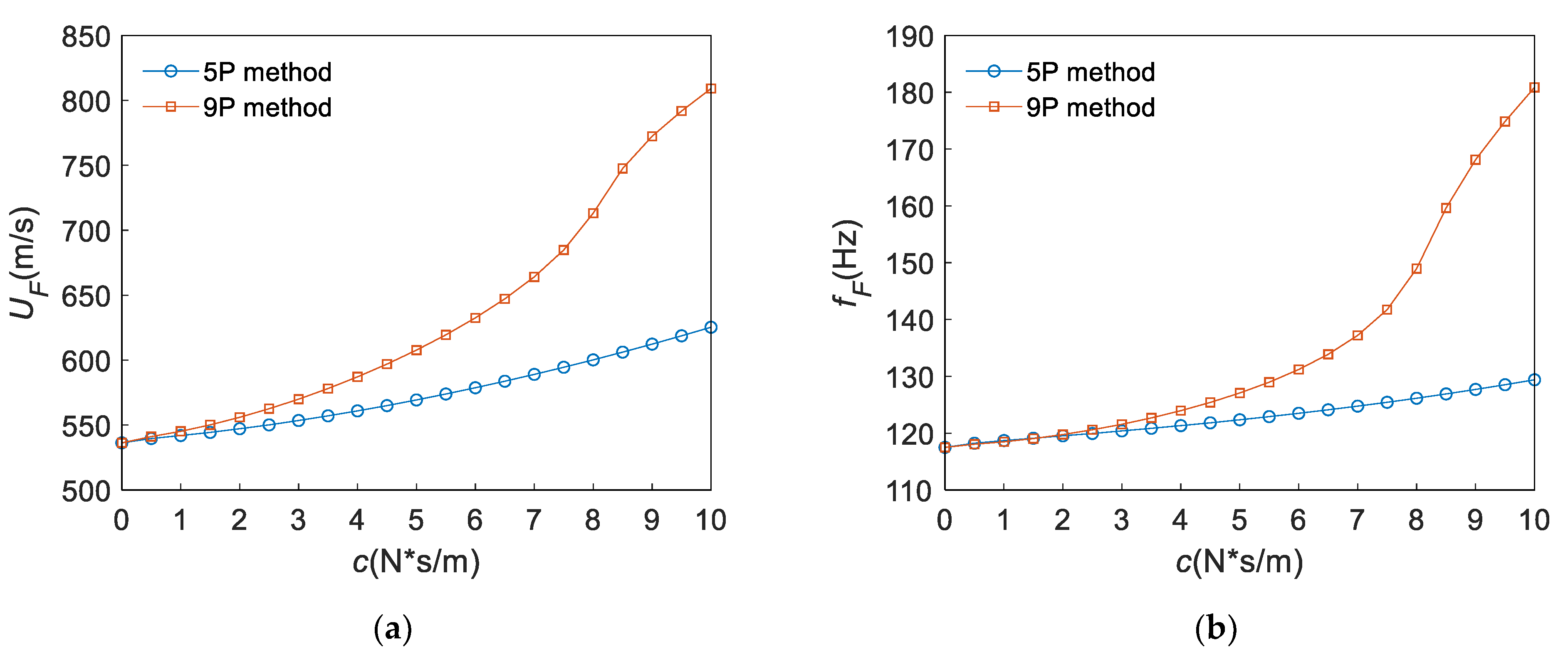
In order to better understand the gain brought by the configured dampers to the flutter characteristics of the panel, the case QP is still taken as an example. By changing the damping coefficients of all dampers from 0 to 10, we can observe the variation in the flutter velocities and frequencies of the panel as shown in
Figure 19. It can be seen from
Figure 19 that both the 5P method and the 9P method can effectively improve the flutter velocity and frequency of the panel. The flutter characteristics of the panel based on the 5P method basically increase linearly with the damping coefficient. However, the flutter velocities and flutter frequencies of the panel based on the 9P method increase faster than those based on the 5P method and show a trend of nonlinear growth. In particular, when the damping coefficient is 10, the flutter velocity and flutter frequency obtained based on the 9P method are 809.1 m/s and 180.9 Hz, respectively. Compared with the case of QP without dampers, the increasing ratios of the flutter velocity and the flutter frequency of the panel is 50.87% and 53.96%, respectively. Additionally, the 9P method, which suppresses the energy of the first four order main vibrations, has better enhancement effects on the flutter velocity and flutter frequency compared with the 5P method (only the first three orders are suppressed). The recovery and e enhancement of the flutter characteristics of the panel can be achieved by adjusting the damping coefficients of the dampers.
6.4. Effects of Aspect Ratio on Flutter Characteristics of the Panel
In this section, we discuss the effects of the aspect ratio on the flutter characteristics of the panel. For the convenience of comparison, the area of the plate remains unchanged. Two kinds of flat plates with different aspect ratios are shown in
Figure 20. In
Figure 20a,
mm and
mm, which meet
. However, In
Figure 20b,
mm and
mm, which meet
. For convenience, we note that the cases shown in
Figure 20a,b are the configurations of AR1 and AR2, respectively. Here, we only discuss the case where there is a mass attachment at point (
,
), that is, the case of QP discussed in
Section 6.1.
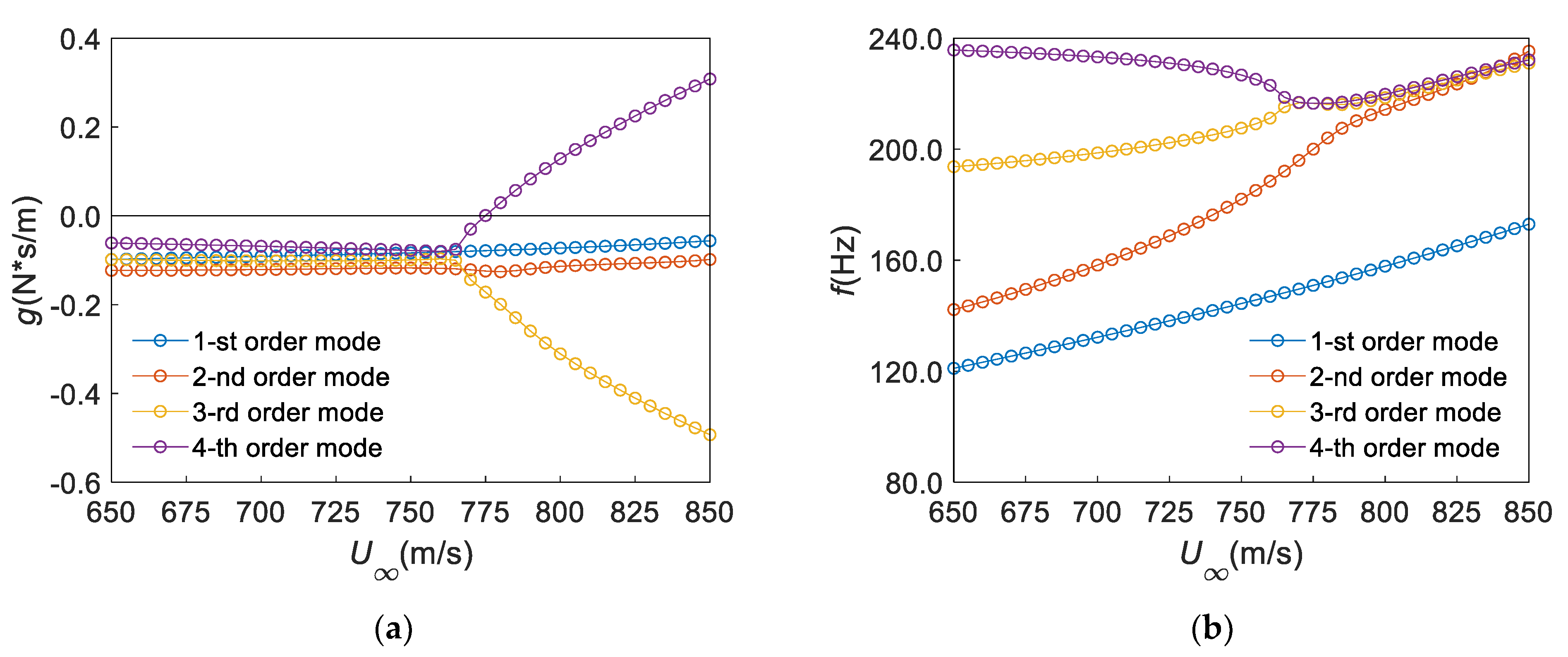
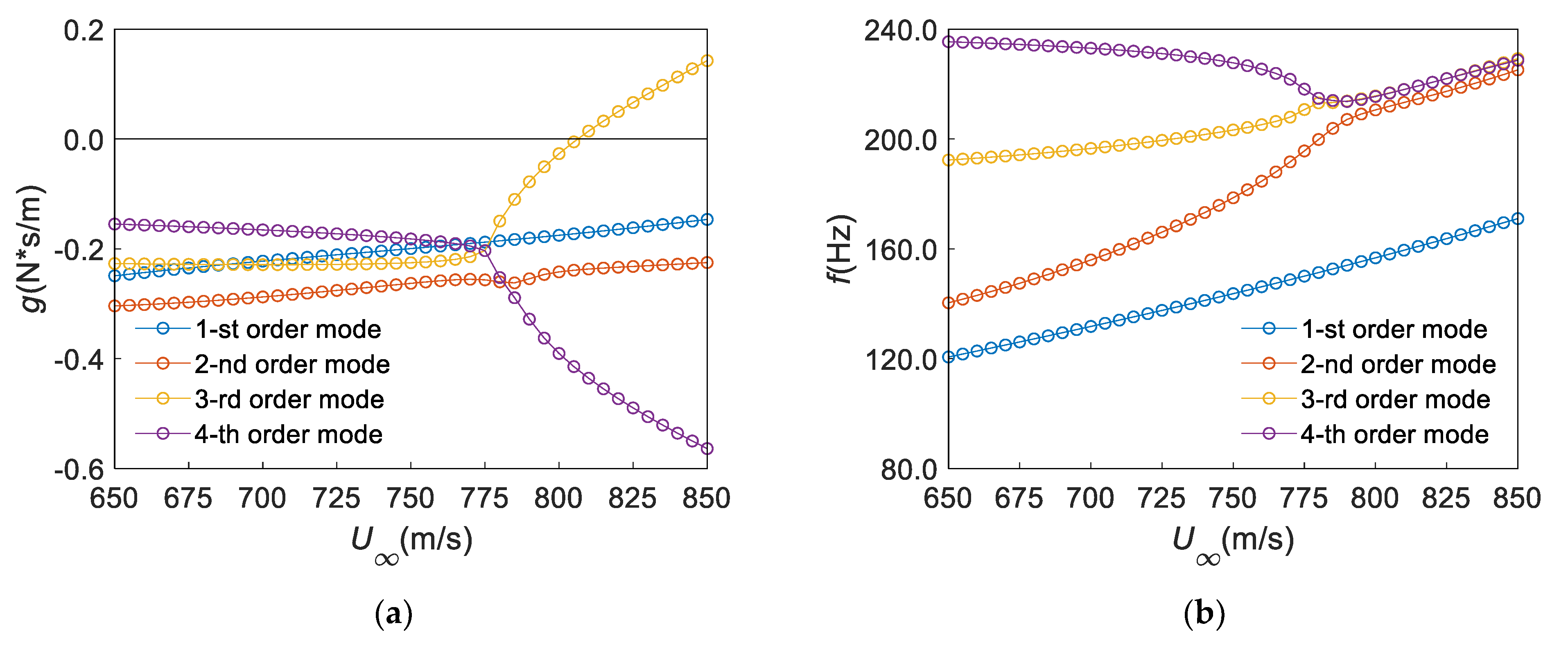
First, we discuss the configuration of AR1. The results of the flutter calculation for the panel with no mass attachment are shown in
Figure 21. It can be seen from
Figure 21 that the flutter velocity and flutter velocity calculated by the program proposed in this paper are
m/s and
Hz, respectively. Flutter occurs in the fourth mode. It can be seen from
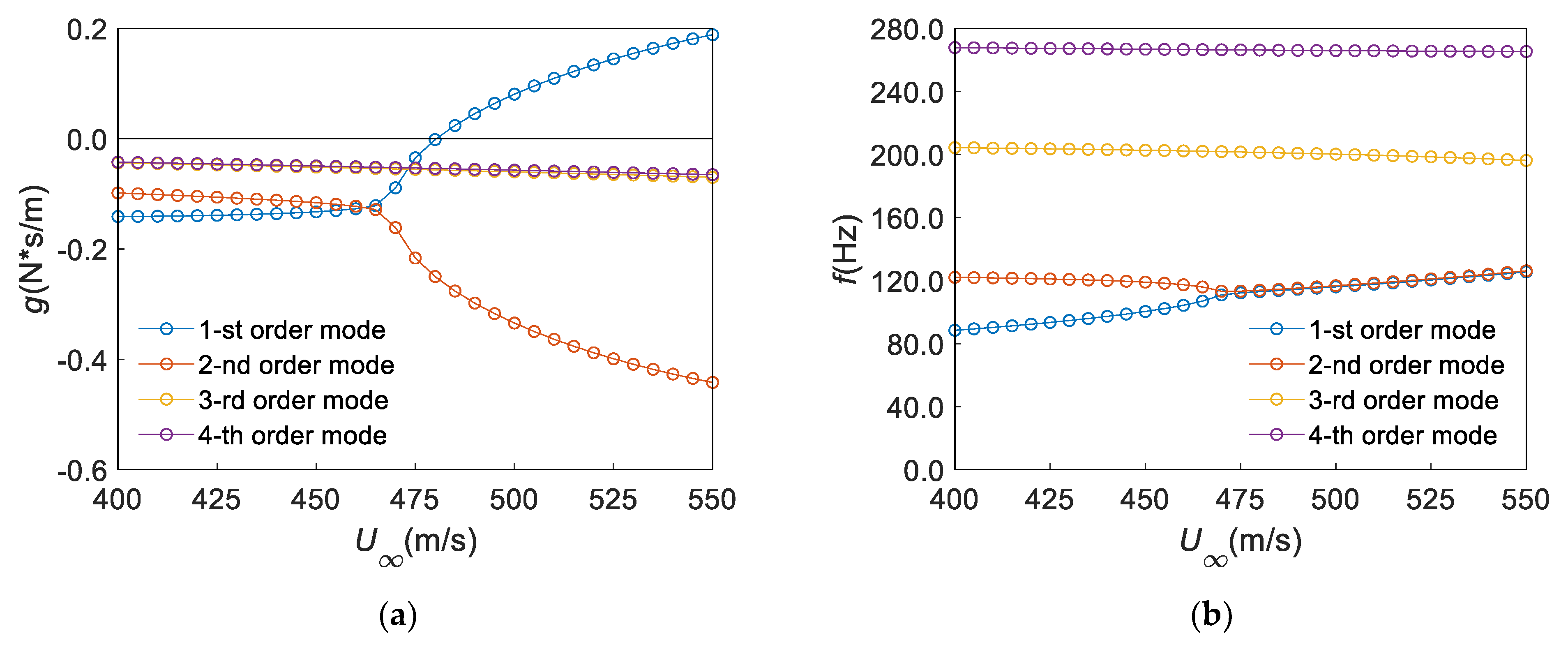
Figure 4b that the first four modes are coupled together when flutter occurs. Then, the flutter calculation results under the case of QP are plotted in
Figure 22. It can be seen from
Figure 22a that the flutter velocity is
m/s, which decreases by 3.72% compared with the case of NP. At the same time, it can be seen from
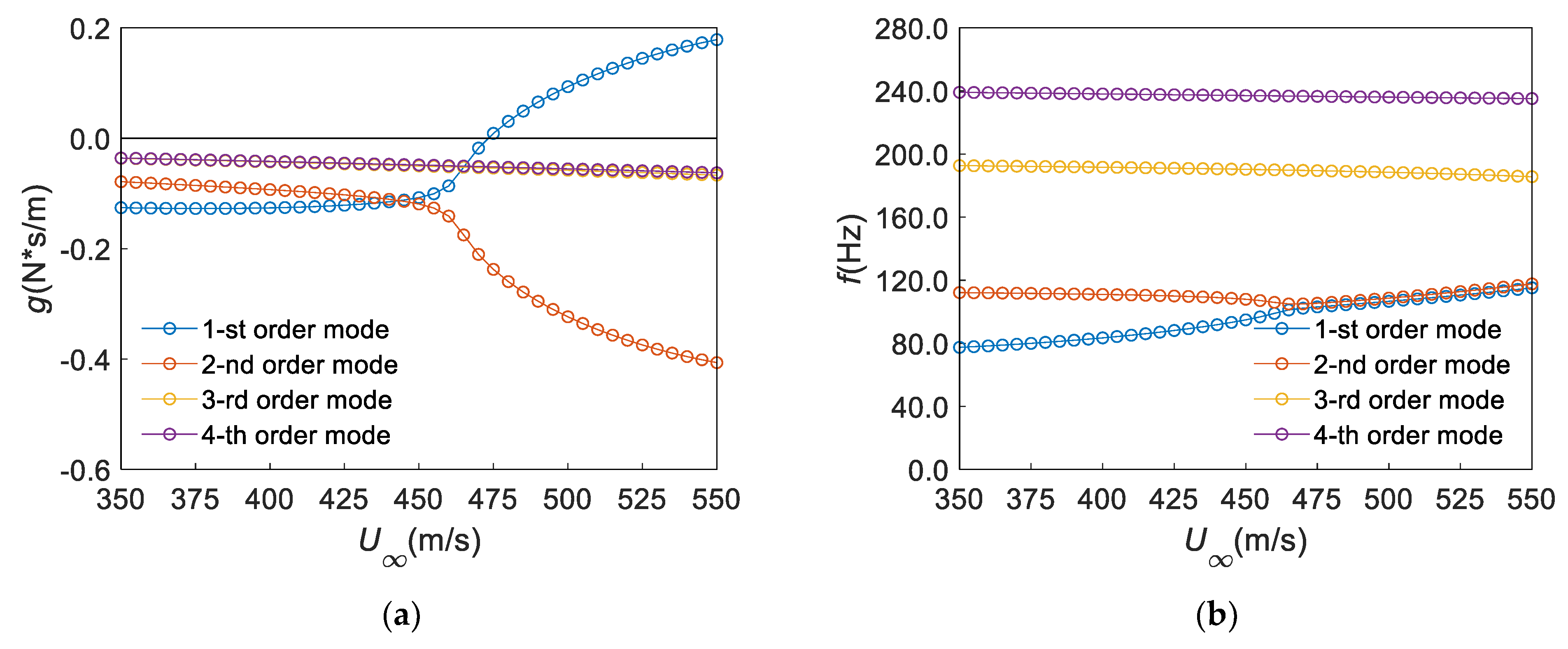
Figure 22b that the flutter frequency decreases by 5.87%. When dampers are configured on the wall panel using the 9P method (the damping coefficients of the dampers are all taken as 3.0), the flutter calculation results are shown in
Figure 23. It can be seen from
Figure 23 that the flutter velocity and flutter frequency of the panel with artificial damping configured according to the 9P method are
m/s and
Hz, respectively. Compared with the case QP, the flutter velocity was increased by 4.05%. However, the flutter frequency only increased by 0.28%.
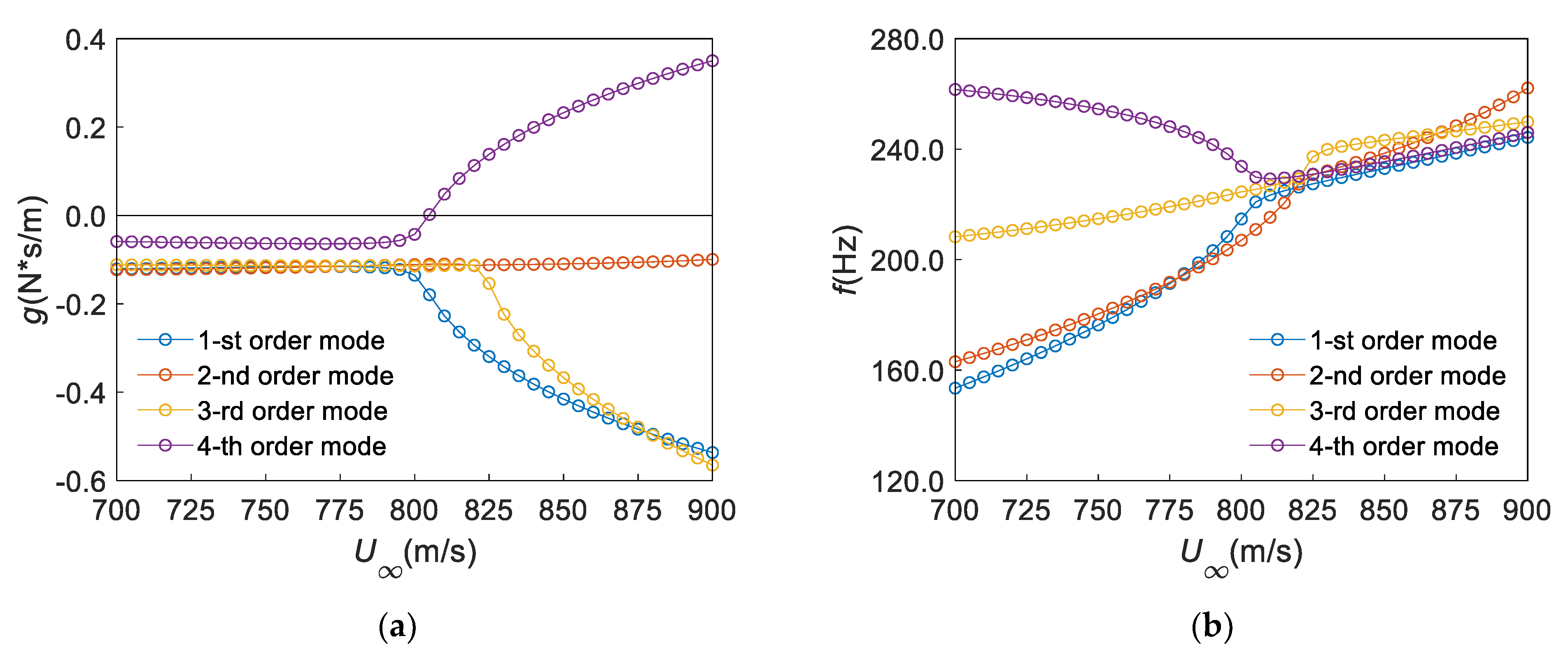
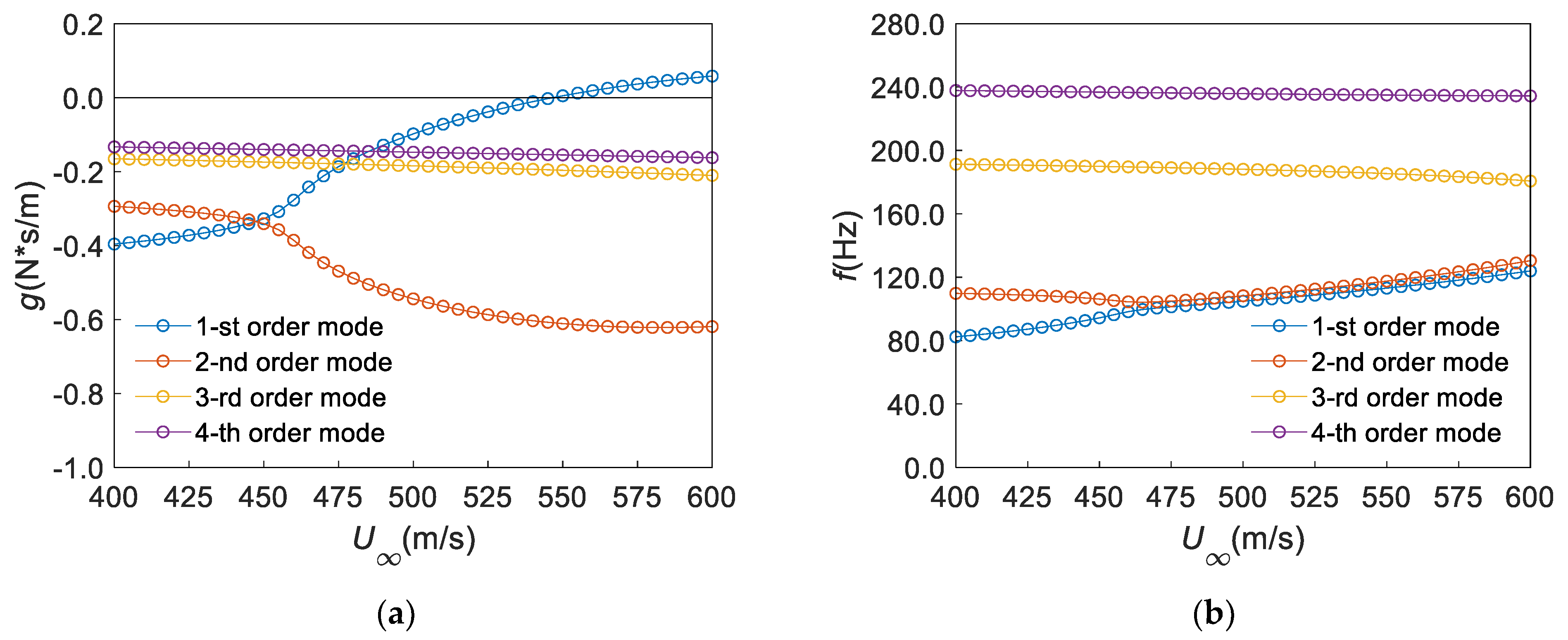
Next, the configuration of AR2 is discussed.
Figure 24 shows the results of the flutter calculation for the panel with no mass attachment. It can be seen from
Figure 24 that the flutter velocity and flutter velocity are
m/s and
Hz, respectively. Flutter occurs in the first mode. It can be seen from
Figure 4b that the first mode is coupled with the second mode when flutter occurs. Then, similar to the configuration of AR1, the flutter calculation results under the case of QP are plotted in
Figure 25. It can be seen from
Figure 25a that the flutter velocity is
m/s, which decreases by 1.46% compared with the case of NP. At the same time, it can be seen from
Figure 25b that the flutter frequency decreases by 9.03%. Similarly, the damping coefficient of the damper is still taken as 3.0. The flutter calculation results are shown in
Figure 26 when using the 9P method. It can be seen from
Figure 26 that the flutter velocity and flutter frequency of the panel are
m/s and
Hz, respectively. Compared with the case of QP, the flutter velocity was increased by 15.53%. However, the flutter frequency only increased by 9.44%.
Additionally, by comparing the flutter calculation results in
Figure 21,
Figure 22,
Figure 23,
Figure 24,
Figure 25 and
Figure 26 with those in
Figure 7, it can be seen that the flutter velocity and flutter frequency of the panel are higher than that of the square panel when
, while they are lower than those of the square panel when
. That is to say, reducing the length of the panel in the direction of air flow can effectively improve the flutter characteristics of the panel. In addition, we can draw conclusions that the flutter characteristics of panels with different aspect ratios change when they have mass attachments. Furthermore, the proposed damping scheme can enhance the flutter characteristics of panels with different aspect ratios and mass attachments.
































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}