
Asymptotic Motion of a Satellite under the Action of Sdot Magnetic Attitude Control




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Evolutionary Equations of Motion
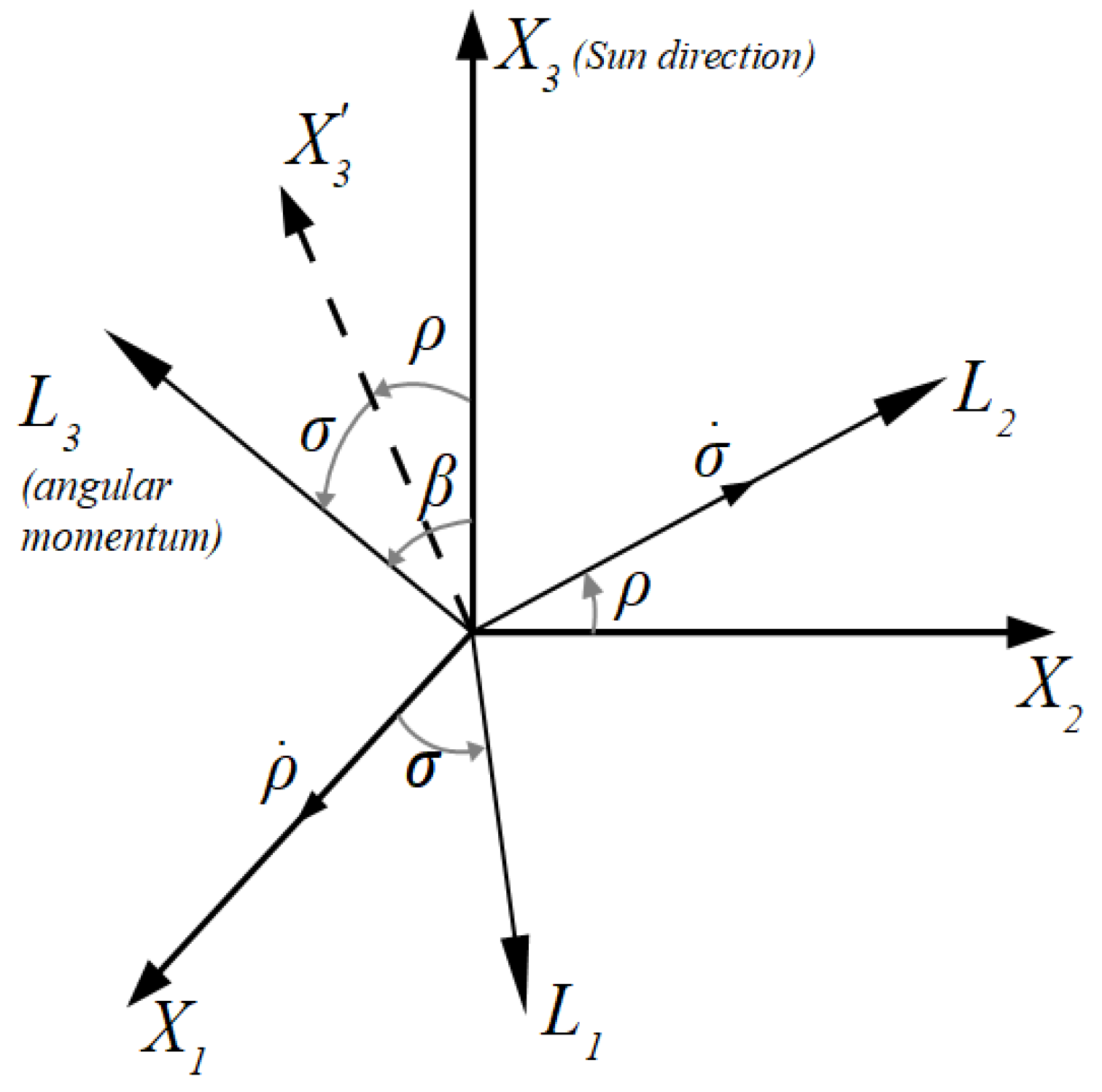
2.1. Angular Momentum Vector Attitude
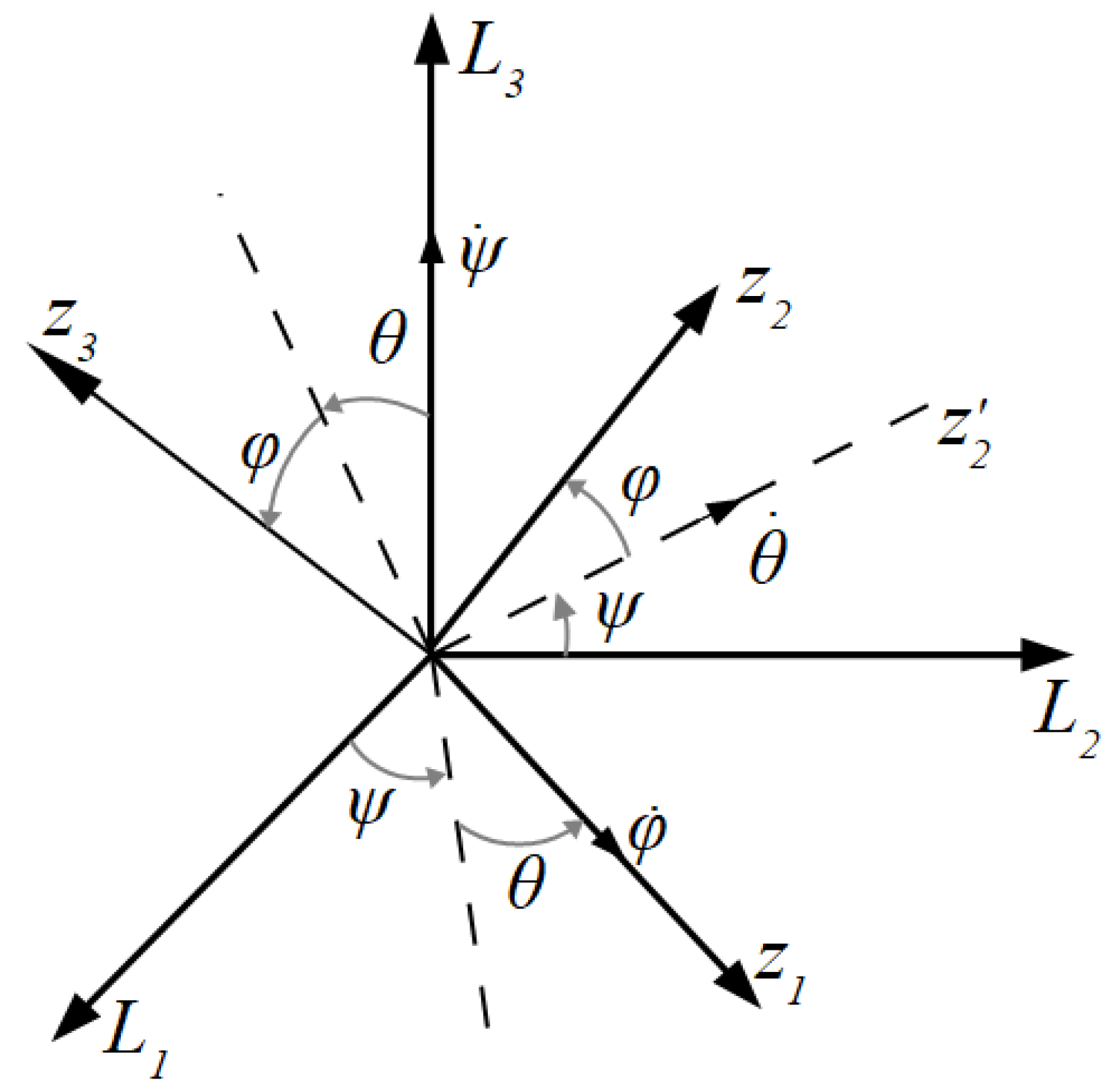
2.2. Satellite Attitude Relative to the Angular Momentum
3. Satellite Environment
3.1. Control Law and Geomagnetic Field Model in Simplified Scenario
3.2. Satellite Motion Framework in the Numerical Simulation
4. Evolutionary Equations near the Required Attitude
5. Linearized Equations Analysis
5.1. Maximum Moment of Inertia Oscillations Amplitude
5.2. Averaged Equations of Motion
5.3. Maximum Moment of Inertia Oscillations Amplitudes Evolution
6. Numerical Simulation
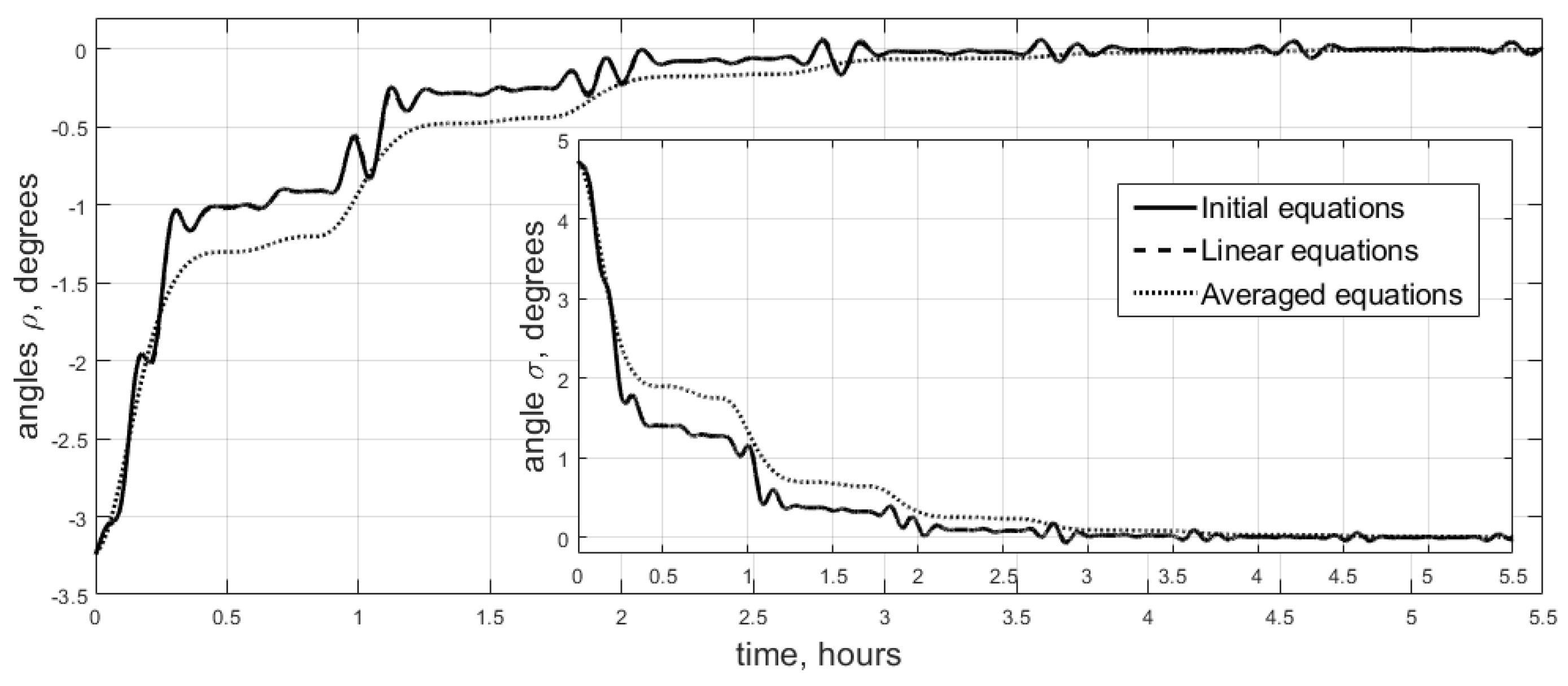
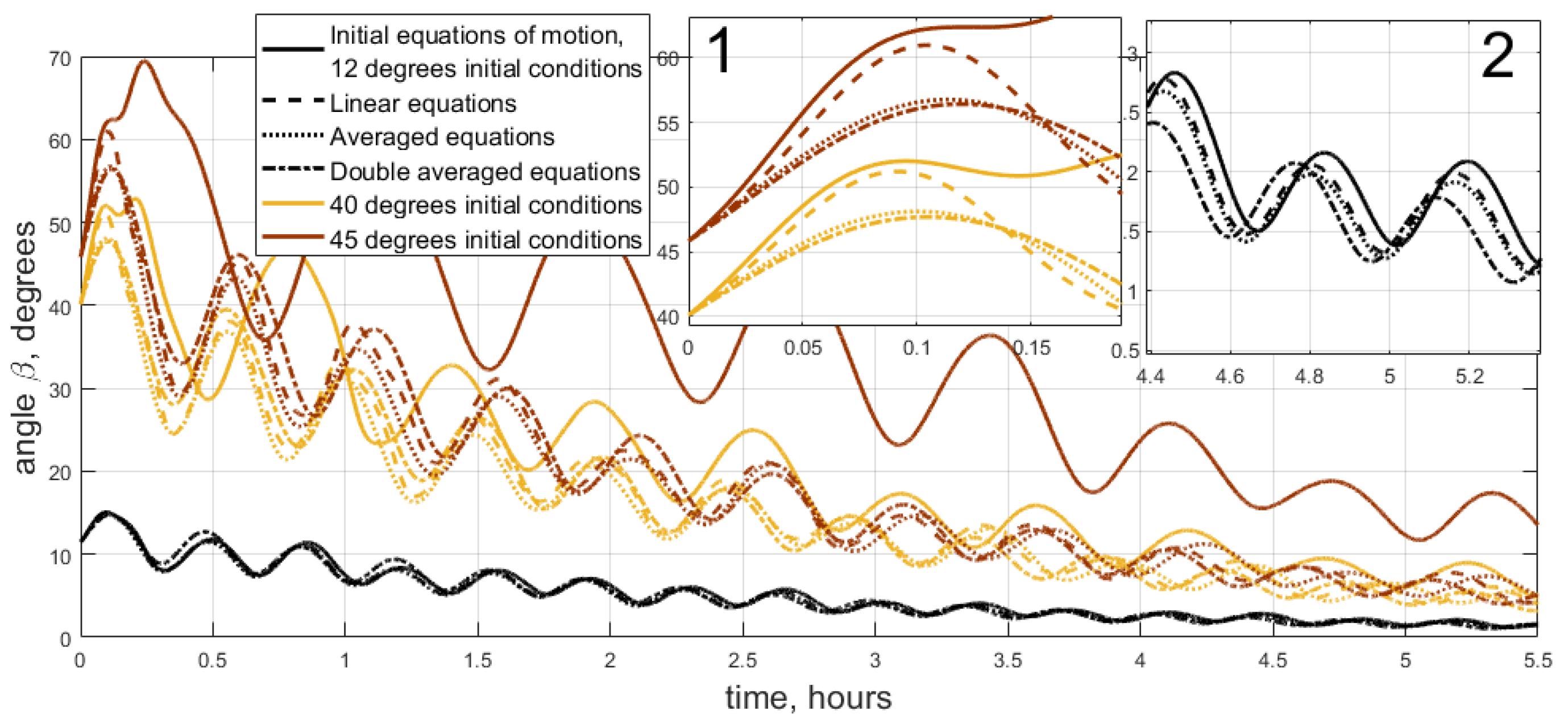
6.1. Simplified Scenario Simulation
- Inertia moments of the satellite 1.1, 1.3, 1.5 kg·m2;
- Orbit inclination 51.7°, altitude 550 km (derived parameters are ≈ 24,000 nT, orbital rate ≈ 10−3 s−1);
- The Sun’s direction in reference frame OY is defined by two angles, and , equal to 50 degrees each. These angles are introduced similarly to the angular momentum vector attitude angles and in Section 2.1, Figure 1. Accordingly, expression (1) is used for the transition matrix calculation;
- Control gain = 60 kg·m2/s·T.
6.2. Simulation in a Realistic Scenario
- aerodynamic torque calculation:
- satellite parallelepiped sides are 0.2, 1.1, 1.8 m. This is a simplified geometry of Chibis-M satellite which was equipped with solar panels;
- center of mass displacement relative to the center of pressure is 4, 6, 8 cm along satellite frame axes;
- atmosphere density is 1.8 × 10−13 kg/m3 which corresponds to average solar activity for 550 km orbit;
- Sun direction determination error is 1 degree, both for the constant bias and noise;
- unknown disturbance value is approximately half of the gravitational torque;
- control torque calculation and numerical integration steps are one second each;
- orbit is slightly elliptical with eccentricity 0.01.
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Karpenko, S.; Ovchinnikov, M.; Roldugin, D.; Tkachev, S. One-axis attitude of arbitrary satellite using magnetorquers only. Cosm. Res. 2013, 51, 478–484. [Google Scholar] [CrossRef]
- Zelenyi, L.; Gurevich, A.; Klimov, S.; Angarov, V.; Batanov, O.; Bogomolov, A.; Bogomolov, V.; Bodnar, L.; Vavilov, D.; Vladimirova, G.; et al. The academic Chibis-M microsatellite. Cosm. Res. 2014, 52, 87–98. [Google Scholar] [CrossRef]
- Ovchinnikov, M.; Roldugin, D.; Tkachev, S.; Karpenko, S. New one-axis one-sensor magnetic attitude control theoretical and in-flight performance. Acta Astronaut. 2014, 105, 12–16. [Google Scholar] [CrossRef]
- Stickler, A.C. A Magnetic Control System for Attitude Acquisition; NASA-CR-130145; NTRS: Washington, DC, USA, 1972. [Google Scholar]
- Stickler, A.; Alfriend, K. Elementary Magnetic Attitude Control System. J. Spacecr. Rocket. 1976, 13, 282–287. [Google Scholar] [CrossRef]
- Shigehara, M. Geomagnetic attitude control of an axisymmetric spinning satellite. J. Spacecr. Rocket. 1972, 9, 391–398. [Google Scholar] [CrossRef]
- Thomson, W. Spin stabilization of attitude against gravity torque. J. Astronaut. Sci. 1962, 9, 31–33. [Google Scholar]
- Zavoli, A.; Giulietti, F.; Avanzini, G.; De Matteis, G. Spacecraft Dynamics Under the Action of Y-dot Magnetic Control Law. Acta Astronaut. 2016, 122, 146–158. [Google Scholar] [CrossRef]
- Avanzini, G.; de Angelis, E.; Giulietti, F. Spin-axis pointing of a magnetically actuated spacecraft. Acta Astronaut. 2014, 94, 493–501. [Google Scholar] [CrossRef]
- de Ruiter, A. A fault-tolerant magnetic spin stabilizing controller for the JC2Sat-FF mission. Acta Astronaut. 2011, 68, 160–171. [Google Scholar] [CrossRef]
- Wheeler, P. Spinning Spacecraft Attitude Control via the Environmental Magnetic Field. J. Spacecr. Rocket. 1967, 4, 1631–1637. [Google Scholar] [CrossRef]
- Soken, H.; Sakai, S.; Asamura, K.; Nakamura, Y.; Takashima, T.; Shinohara, I. Filtering-Based Three-Axis Attitude Determination Package for Spinning Spacecraft: Preliminary Results with Arase. Aerospace 2020, 7, 97. [Google Scholar] [CrossRef]
- Aleksandrov, A.; Tikhonov, A. Monoaxial Electrodynamic Stabilization of an Artificial Earth Satellite in the Orbital Coordinate System via Control With Distributed Delay. IEEE Access 2021, 9, 132623–132630. [Google Scholar] [CrossRef]
- You, H.; Jan, Y. Sun Pointing Attitude Control with Magnetic Torquers Only. In Proceedings of the 57th International Astronautical Congress, Valenica, Spain, 2–6 October 2006; p. IAC-06-C1.2.01. [Google Scholar]
- Jan, Y.; Tsai, J.-R. Active control for initial attitude acquisition using magnetic torquers. Acta Astronaut. 2005, 57, 754–759. [Google Scholar] [CrossRef]
- Kim, J.; Worrall, K. Sun tracking controller for UKube-1 using magnetic torquer only. IFAC Proc. Vol. 2013, 46, 541–546. [Google Scholar] [CrossRef]
- Ignatov, A.; Sazonov, V. Stabilization of the Solar Orientation Mode of an Artificial Earth Satellite by an Electromagnetic Control System. Cosm. Res. 2018, 56, 388–399. [Google Scholar] [CrossRef]
- Morozov, V.; Kalenova, V. Stabilization of Satellite Relative Equilibrium Using Magnetic Moments and Aerodynamic Forces. Cosm. Res. 2022, 60, 213–219. [Google Scholar] [CrossRef]
- Ergin, E.; Wheeler, P. Magnetic attitude control of a spinning satellite. J. Spacecr. Rocket. 1965, 2, 846–850. [Google Scholar] [CrossRef]
- Sorensen, J. A Magnetic Attitude Control System for an Axisymmetric Spinning Spacecraft. J. Spacecr. Rocket. 1971, 8, 441–448. [Google Scholar] [CrossRef]
- Zhou, B. Lyapunov differential equations and inequalities for stability and stabilization of linear time-varying systems. Automatica 2021, 131, 109785. [Google Scholar] [CrossRef]
- Malkin, I. Theory of Stability of Motion; U.S. Atomic Energy Commission, Technical Information Service: Oak Ridge, TN, USA, 1952. [Google Scholar]
- Arnold, V.; Kozlov, V.; Neishtadt, A. Dynamical Systems III: Mathematical Aspects of Classical and Celestial Mechanics; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Bogoliubov, Y.; Mitropolsky, N. Asymptotic Methods in the Theory of Nonlinear Oscillations; Gordon and Breach: Philadelphia, PA, USA, 1961; ISBN 067720051X. [Google Scholar]
- Celani, F. Robust three-axis attitude stabilization for inertial pointing spacecraft using magnetorquers. Acta Astronaut. 2015, 107, 87–96. [Google Scholar] [CrossRef]
- Benson, C.; Scheeres, D. Averaged Solar Torque Rotational Dynamics for Defunct Satellites. J. Guid. Control. Dyn. 2021, 44, 749–766. [Google Scholar] [CrossRef]
- Aleksandrov, A.; Tikhonov, A. Averaging technique in the problem of Lorentz attitude stabilization of an Earth-pointing satellite. Aerosp. Sci. Technol. 2020, 104, 105963. [Google Scholar] [CrossRef]
- Beletsky, V. Motion of an Artificial Satellite about Its Center of Mass; Israel Program for Scientific Translation: Jerusalem, Israel, 1966. [Google Scholar]
- Ovchinnikov, M.; Penkov, V.; Roldugin, D.; Pichuzhkina, A. Geomagnetic field models for satellite angular motion studies. Acta Astronaut. 2018, 144, 171–180. [Google Scholar] [CrossRef]
- Antipov, K.; Tikhonov, A. Multipole models of the geomagnetic field: Construction of the Nth approximation. Geomagn. Aeron. 2013, 53, 257–267. [Google Scholar] [CrossRef]
- Wertz, J. Spacecraft Attitude Determination and Control; Springer: Dordrecht, Netherlands, 1990. [Google Scholar]
- Alken, P.; Thébault, E.; Beggan, C.; Amit, H.; Aubert, J.; Baerenzung, J.; Bondar, T.; Brown, W.; Califf, S.; Chambodut, A.; et al. International Geomagnetic Reference Field: The thirteenth generation. Earth Planets Space 2021, 73, 49. [Google Scholar] [CrossRef]
- Ovchinnikov, M.; Roldugin, D. Magnetic attitude control and periodic motion for the in-orbit rotation of a dual-spin satellite. Acta Astronaut. 2021, 186, 203–210. [Google Scholar] [CrossRef]
- Inamori, T.; Sako, N.; Nakasuka, S. Compensation of time-variable magnetic moments for a precise attitude control in nano- and micro-satellite missions. Adv. Space Res. 2011, 48, 432–440. [Google Scholar] [CrossRef]
- Inamori, T.; Sako, N.; Nakasuka, S. Magnetic dipole moment estimation and compensation for an accurate attitude control in nano-satellite missions. Acta Astronaut. 2011, 68, 2038–2046. [Google Scholar] [CrossRef]
- Busch, S.; Bangert, P.; Dombrovski, S.; Schilling, K. UWE-3, in-orbit performance and lessons learned of a modular and flexible satellite bus for future pico-satellite formations. Acta Astronaut. 2015, 117, 73–89. [Google Scholar] [CrossRef]
- Roldugin, D.; Tkachev, S.; Ovchinnikov, M. Satellite Angular Motion under the Action of SDOT Magnetic One Axis Sun Acquisition Algorithm. Cosm. Res. 2021, 59, 529–536. [Google Scholar] [CrossRef]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Roldugin, D.; Tkachev, S.; Ovchinnikov, M. Asymptotic Motion of a Satellite under the Action of Sdot Magnetic Attitude Control. Aerospace 2022, 9, 639. https://doi.org/10.3390/aerospace9110639
Roldugin D, Tkachev S, Ovchinnikov M. Asymptotic Motion of a Satellite under the Action of Sdot Magnetic Attitude Control. Aerospace. 2022; 9(11):639. https://doi.org/10.3390/aerospace9110639
Chicago/Turabian StyleRoldugin, Dmitry, Stepan Tkachev, and Mikhail Ovchinnikov. 2022. "Asymptotic Motion of a Satellite under the Action of Sdot Magnetic Attitude Control" Aerospace 9, no. 11: 639. https://doi.org/10.3390/aerospace9110639
APA StyleRoldugin, D., Tkachev, S., & Ovchinnikov, M. (2022). Asymptotic Motion of a Satellite under the Action of Sdot Magnetic Attitude Control. Aerospace, 9(11), 639. https://doi.org/10.3390/aerospace9110639