
Explanation of Machine-Learning Solutions in Air-Traffic Management




Abstract
:1. Introduction
1.1. Predictive Methods
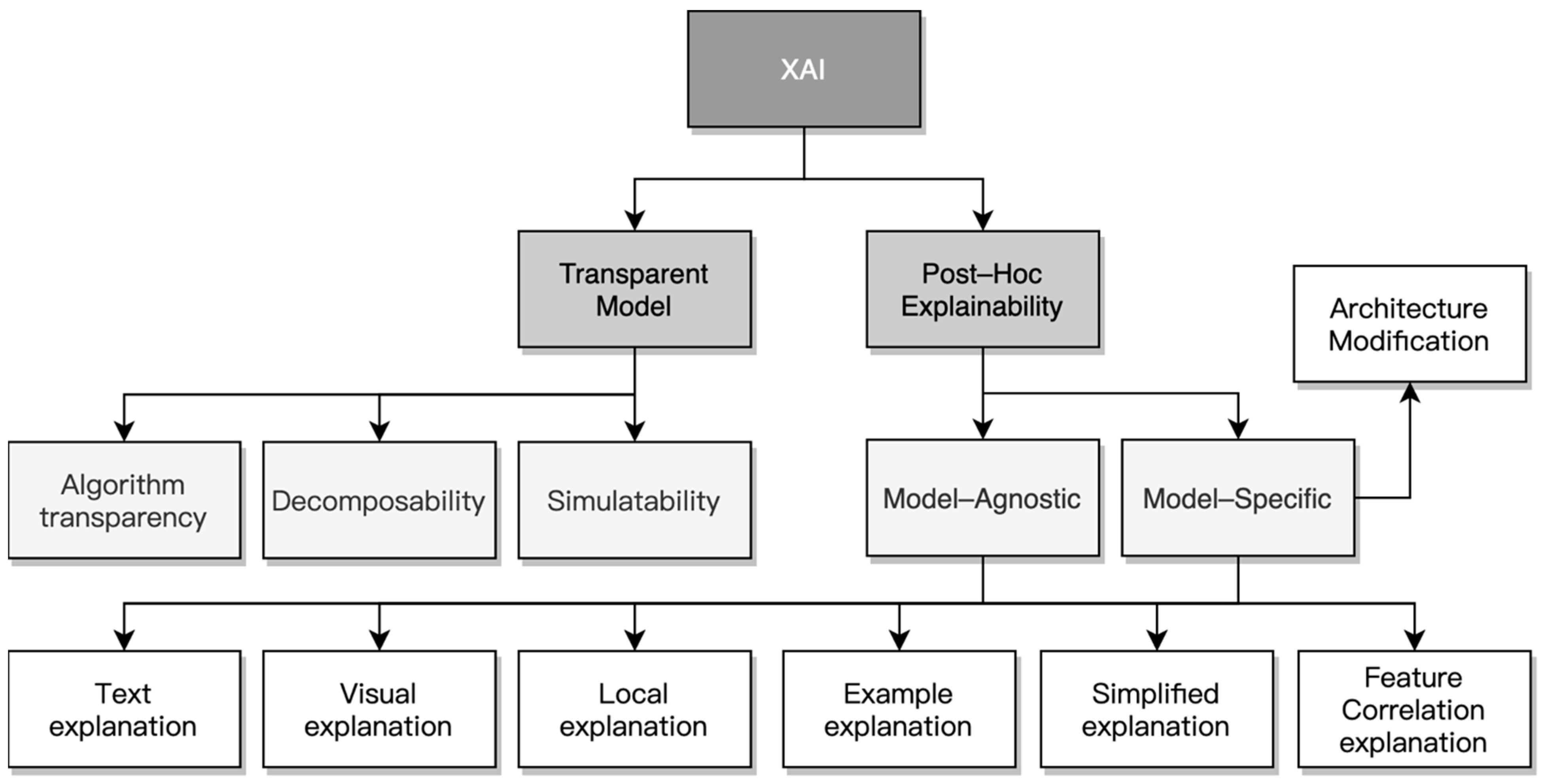
1.2. Explainable AI (XAI)
1.3. Human–Machine Interactions
2. Prediction and Explanation Models
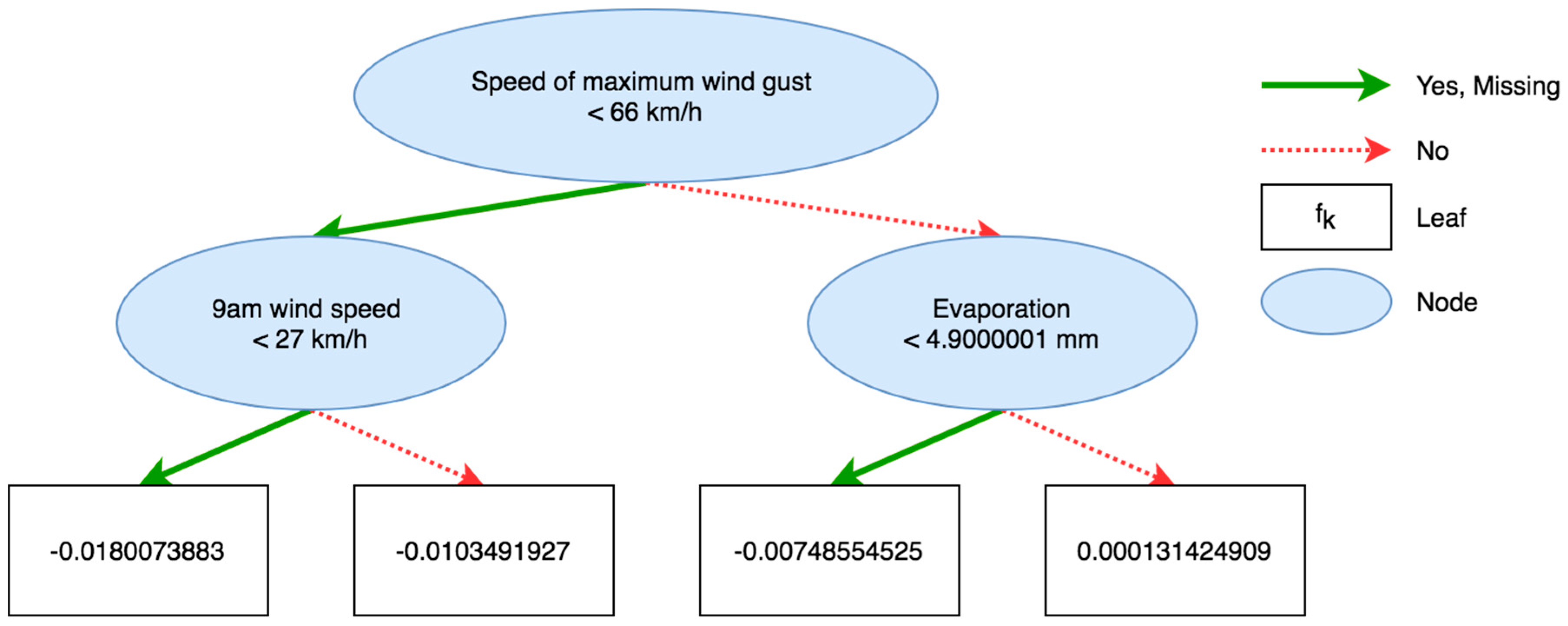
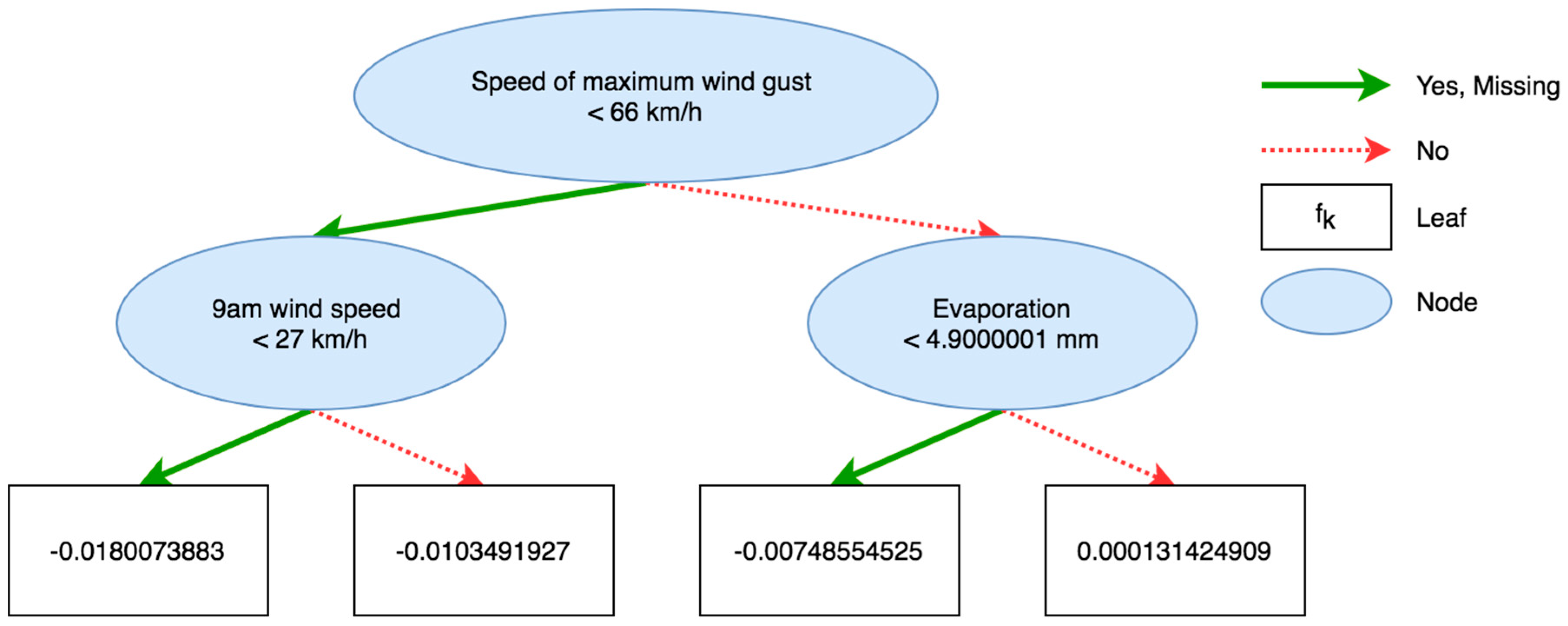
2.1. XGBoost
- Learning rate: in order to prevent overfitting, a shrink step is used in the update process. Each time the weight of a leaf node is updated, the learning-rate coefficient is multiplied to avoid excessive step sizes. A small learning rate can improve the robustness of the model;
- Maximum depth: this value is the maximum depth of branching of the tree, which is also used to avoid overfitting. The larger the value, the easier it is for the model to learn more specific and local samples;
- Minimum child weight: this parameter represents the minimum sample weight required to generate a child node. When the sum of the weights of all samples on the leaf node is less than the set value, the construction process will stop splitting. This parameter is used to avoid over-fitting. When the value is large, it can prevent the model from learning local anomalies in the training data;
- Maximum number of iterations: this is the maximum number of trees generated and also the maximum number of iterations. The higher the number of trees, the better the performance, and more computing time is required;
- Lambda regularisation: this is used to control L2 regularity. It is the coefficient in front of the score of the leaf node in the objective function;
- Alpha regularisation: This is used to control L1 regularity. It also speeds up the algorithms in very high dimensions;
- Gamma value: in order to further split the leaf nodes of the tree, the minimum loss reduction must be set. In other words, the split is determined by observing whether the loss has decreased;
- Sub-sample: this parameter controls the proportion of random sampling for each tree; too large or too small a value will lead to over-fitting and under-fitting of the model.
2.2. Post-Hoc Explanation Model
2.2.1. LIME
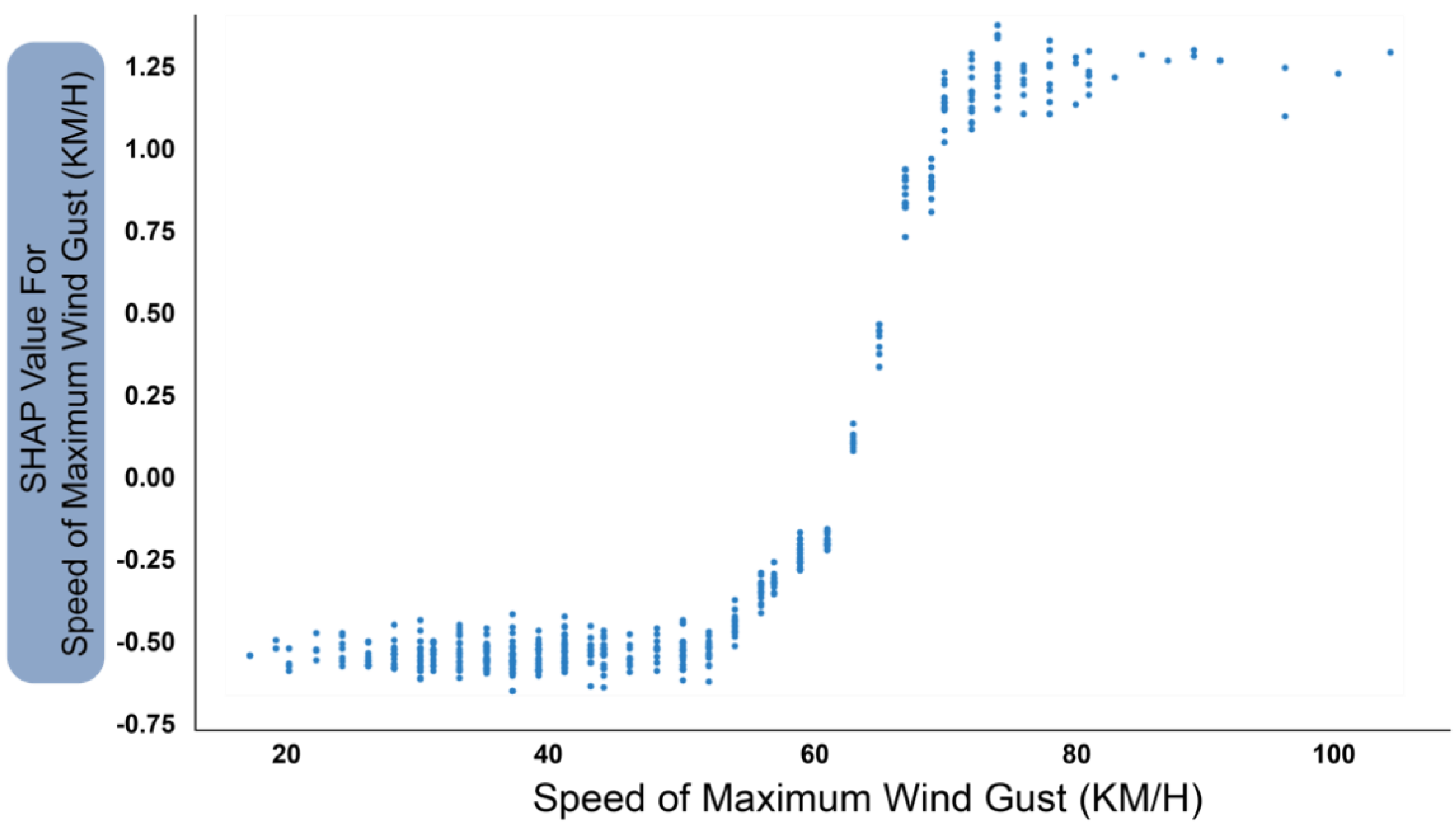
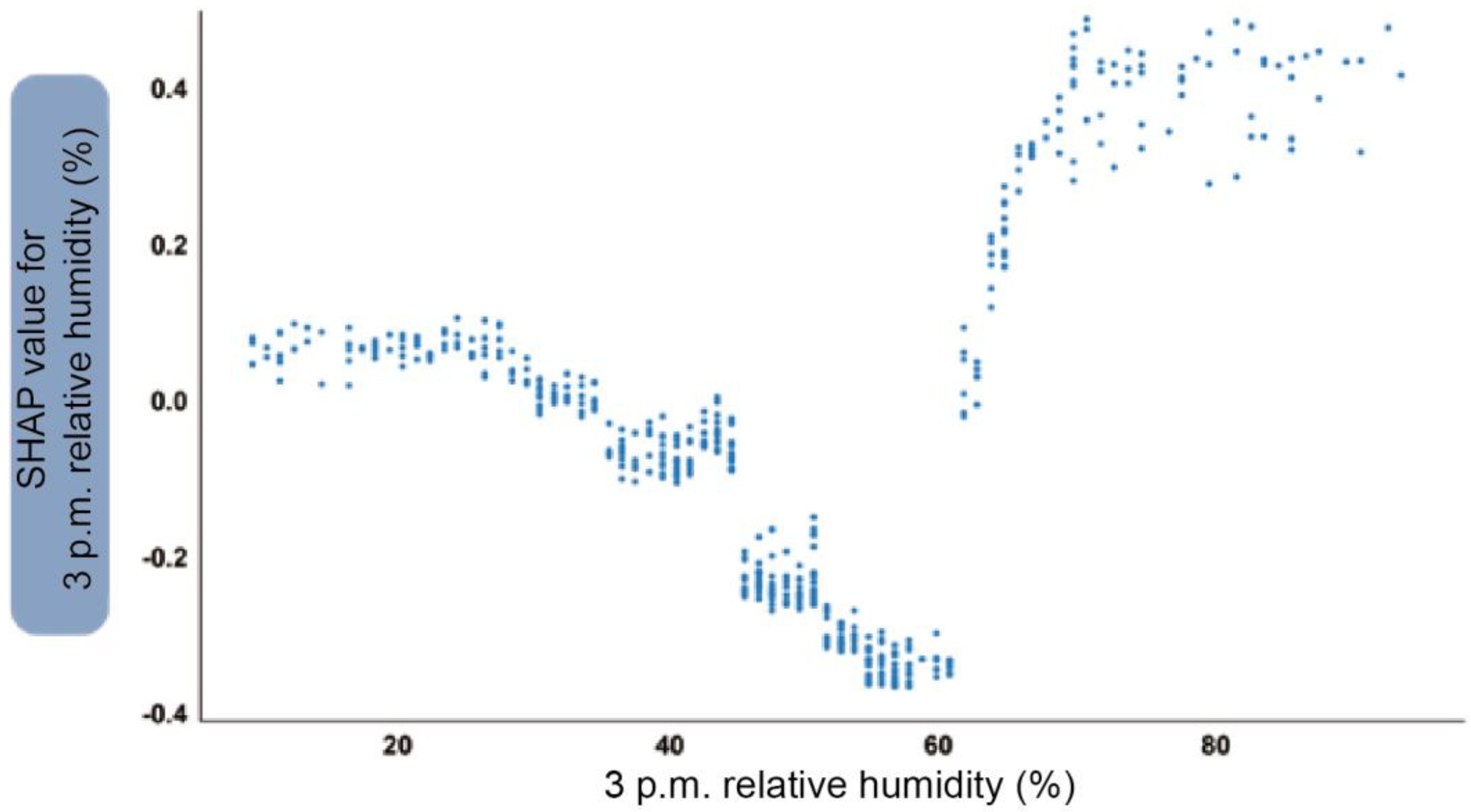
2.2.2. SHAP
3. Model Implementation and Verification Methodology
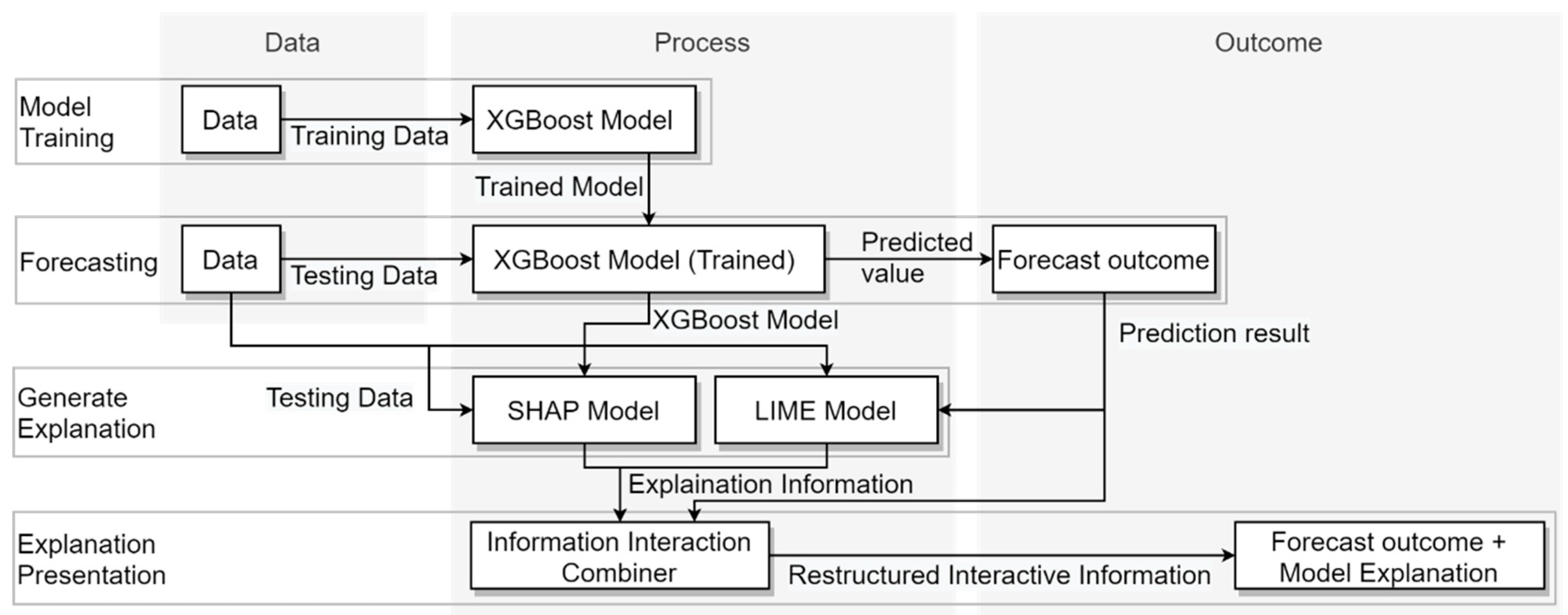
3.1. Prediction Framework
3.2. Datasets
- ID and date
- Synthetic daily data
- Observation data at 9 a.m.
- Observation data at 3 p.m.
- Incidents and accidents report
3.3. Model Preparation
- The learning rate helps to adjust the iteration step size, improving the model’s overall robustness by reducing the weight of each step;
- The maximum depth adjusts the number of specific samples and local samples that the model can obtain to avoid overfitting;
- The minimum child weight determines the sum of the minimum leaf node sample weights, thereby preventing the model from learning local special samples.
- Maximum number of iterations: 800
- Lambda regularization: 1
- Alpha regularization: 0.85
- Gamma value: 0.2
- Sub-sample: 0.85
3.4. Performance Metrics
4. Model Performance Evaluation
4.1. Prediction Outcomes
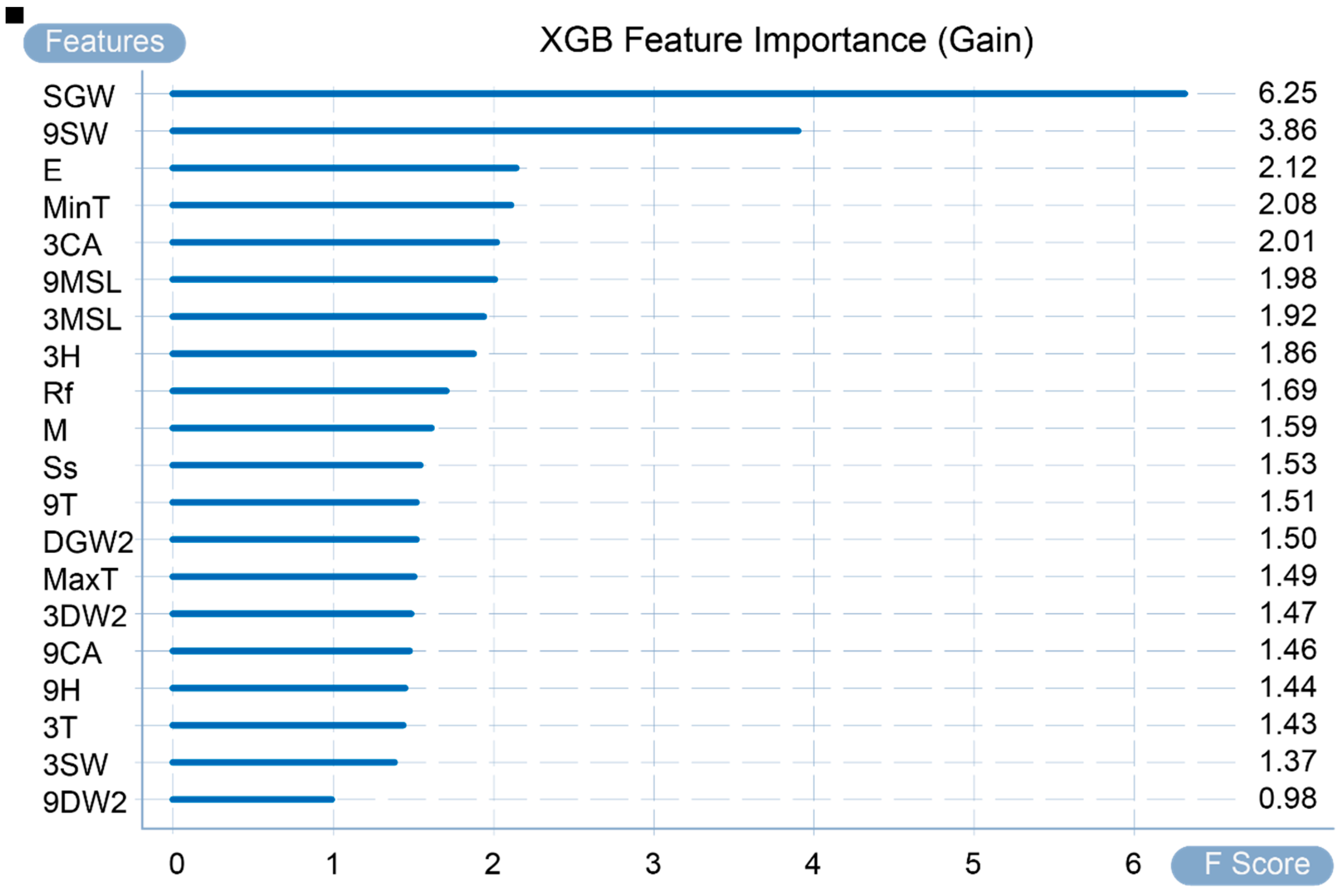
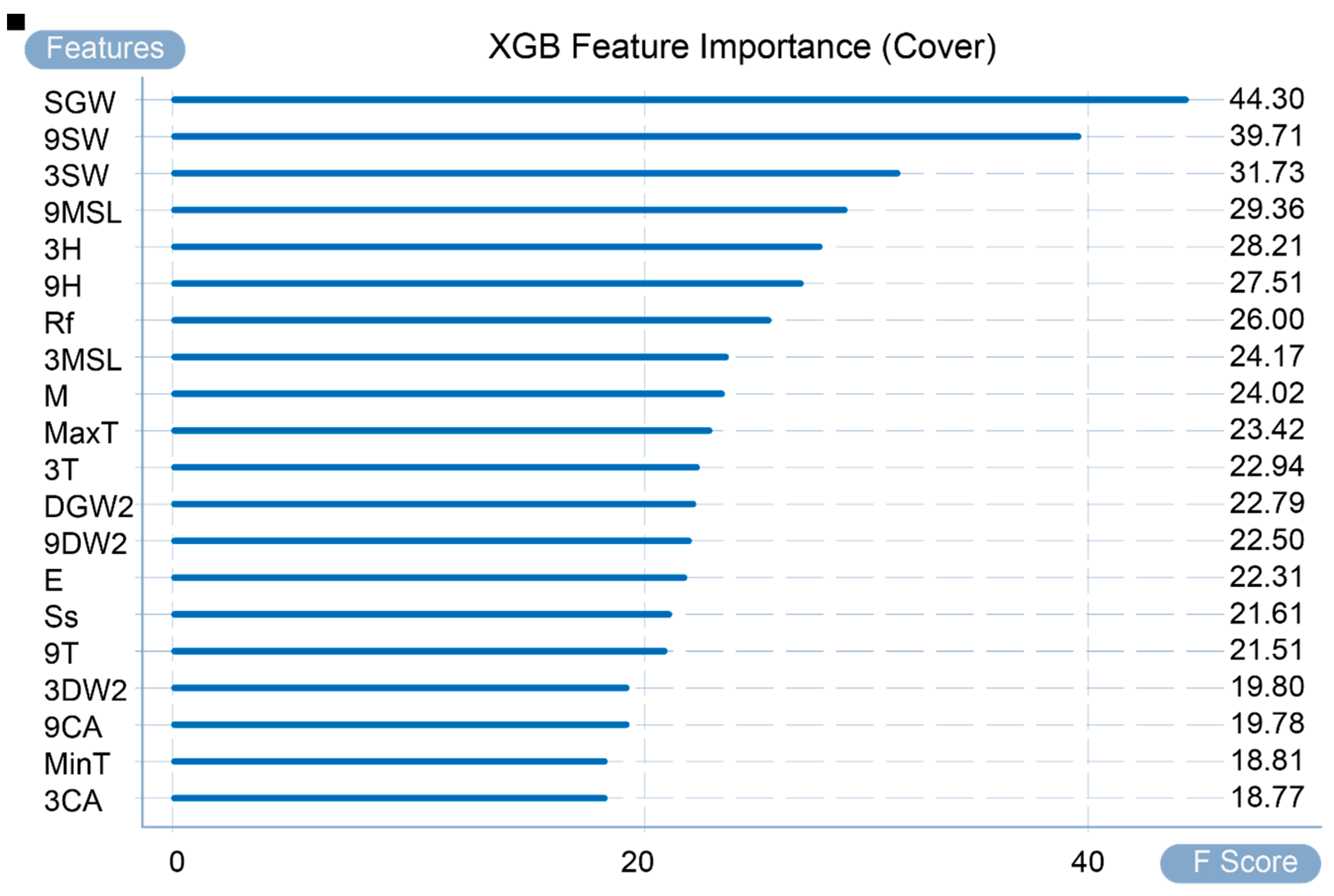
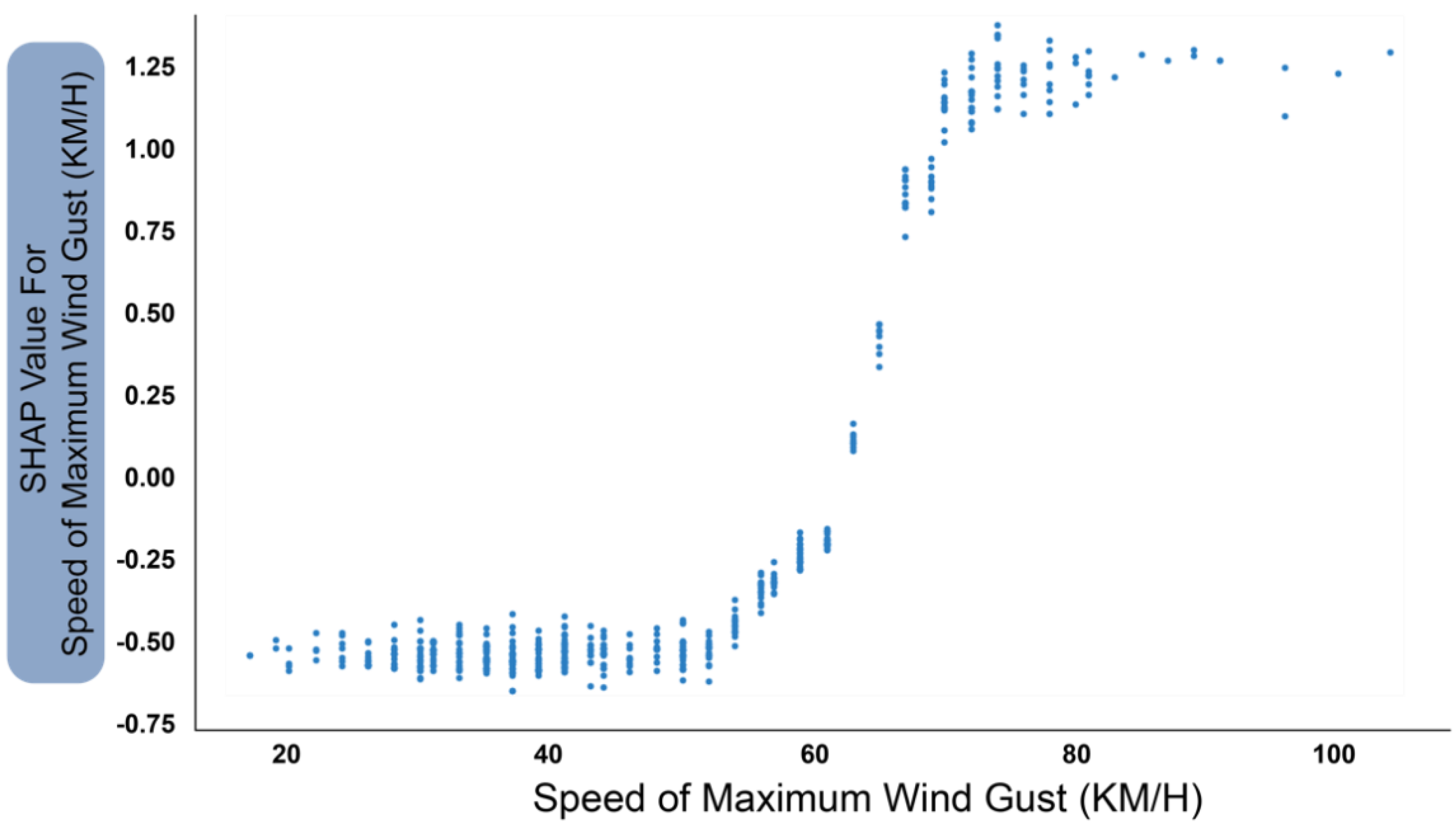
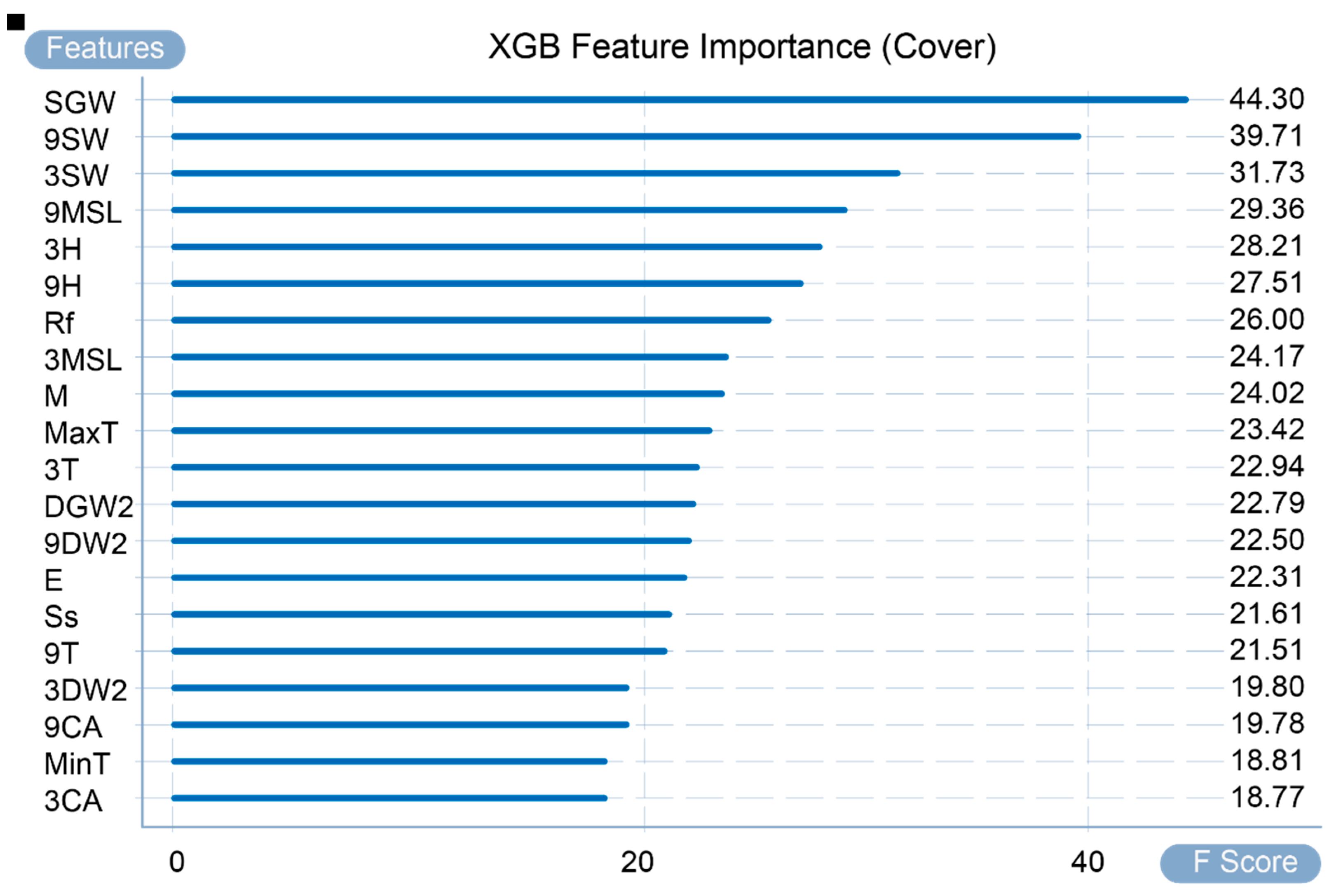
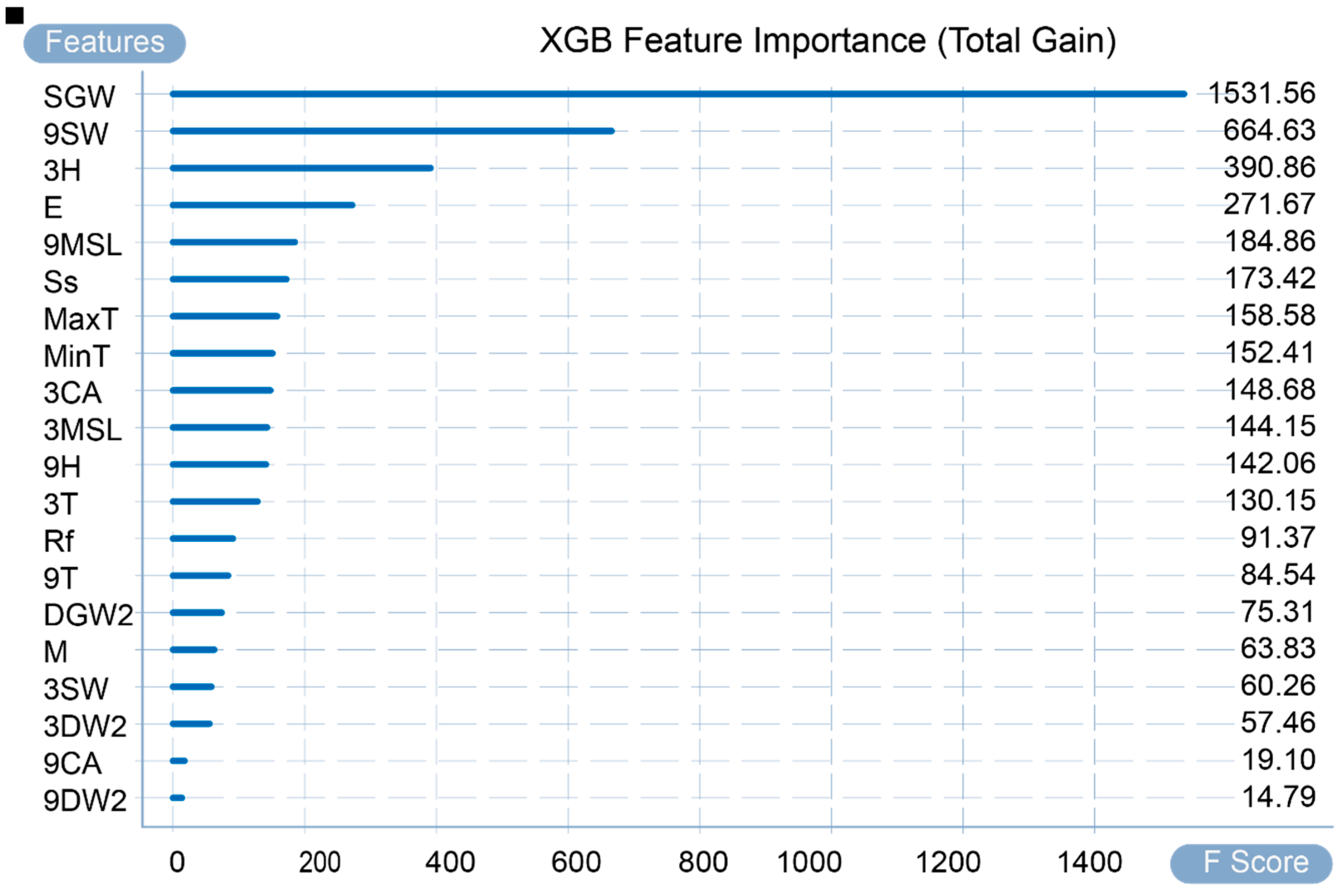
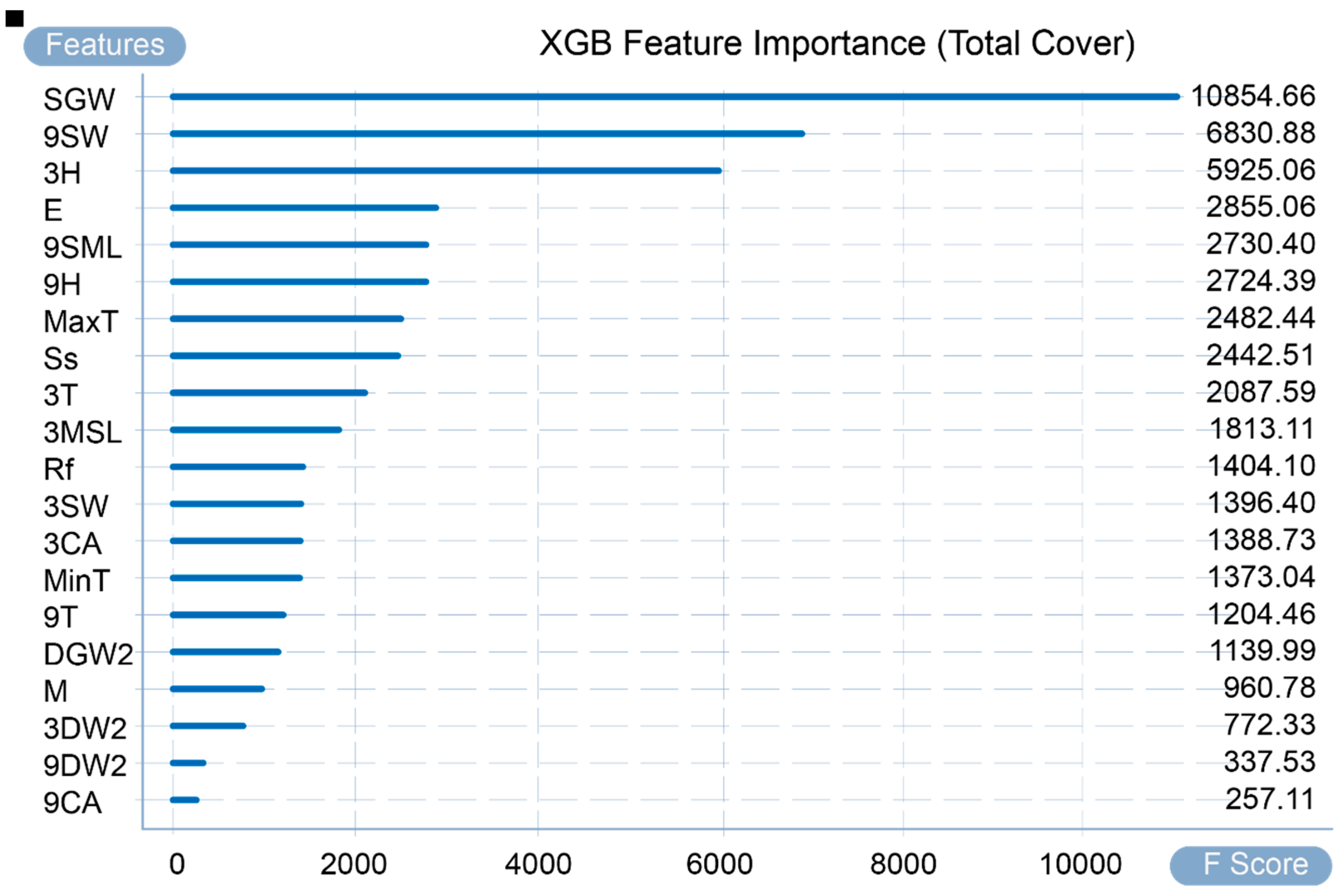
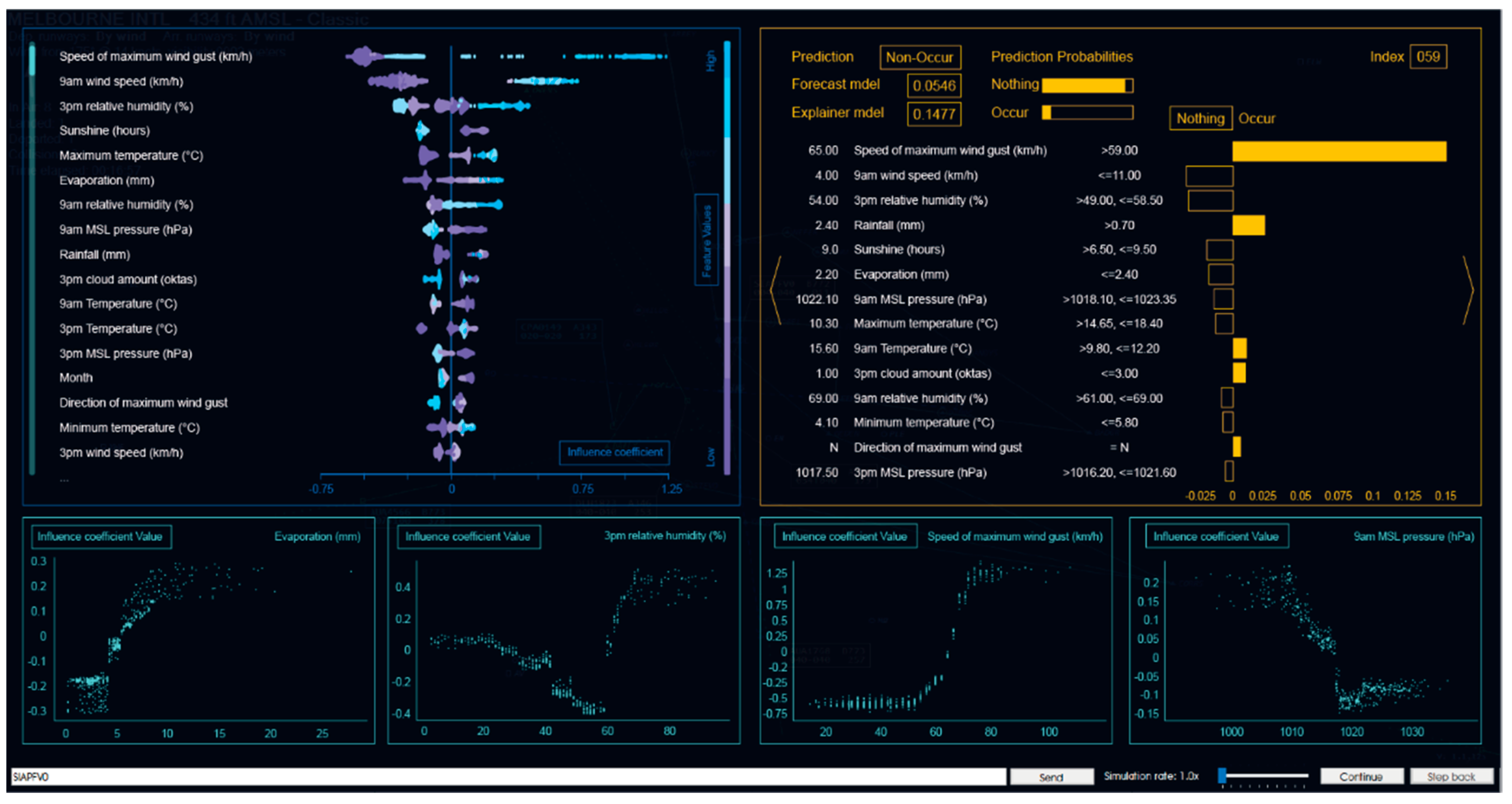
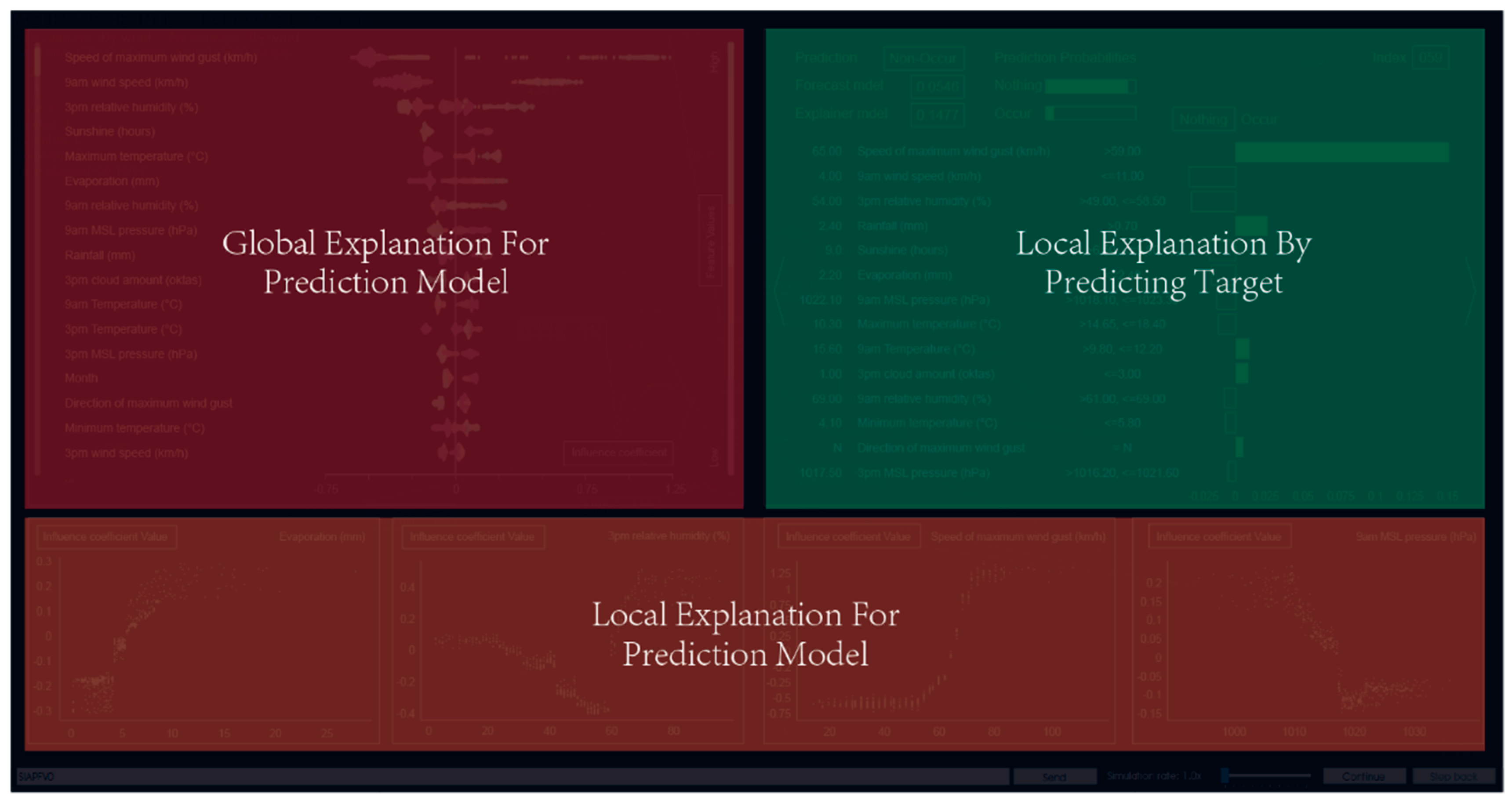
4.2. XGBoost Global Explanation
5. Post-Hoc Local Explanation Generation
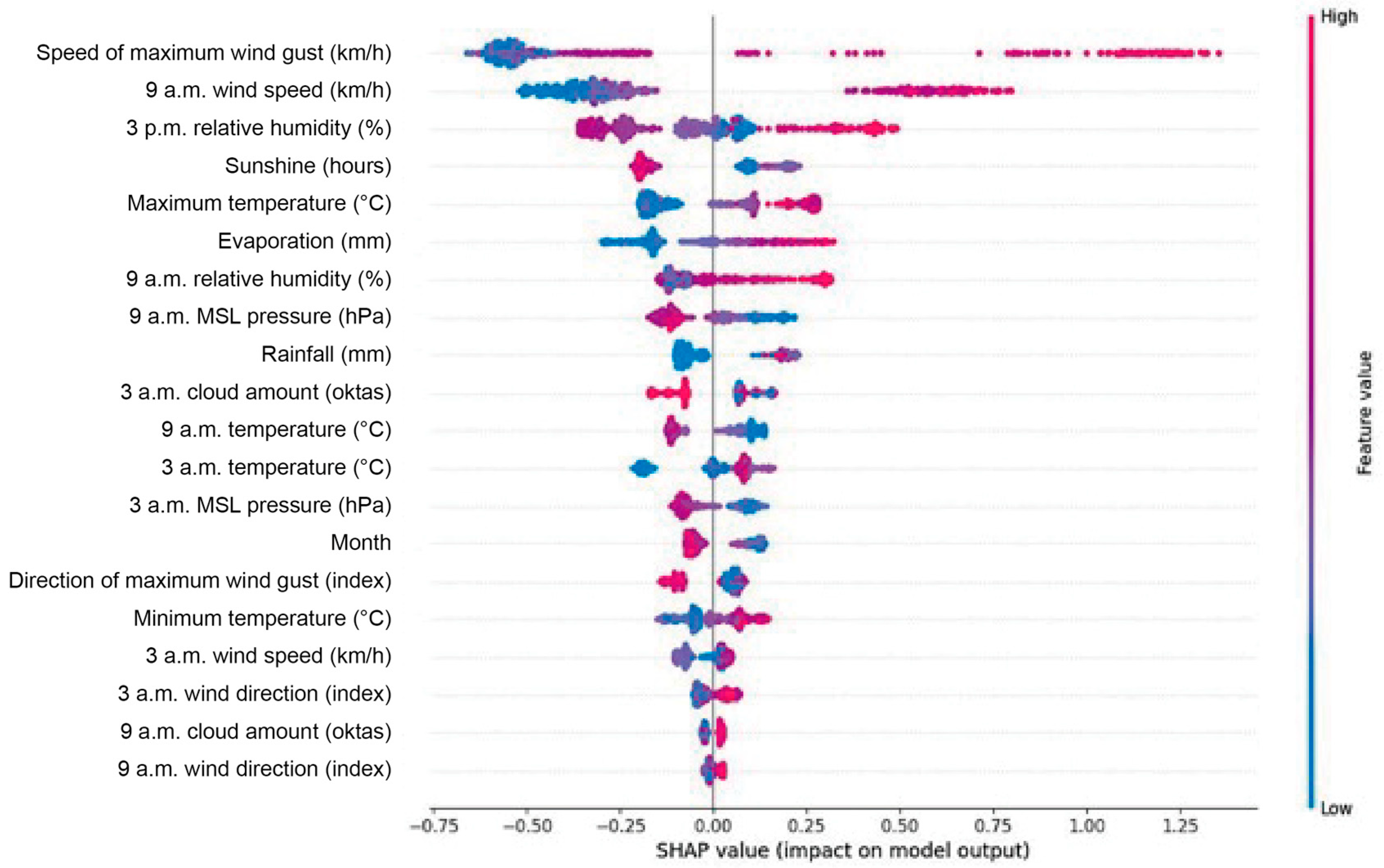
5.1. SHAP Explanation
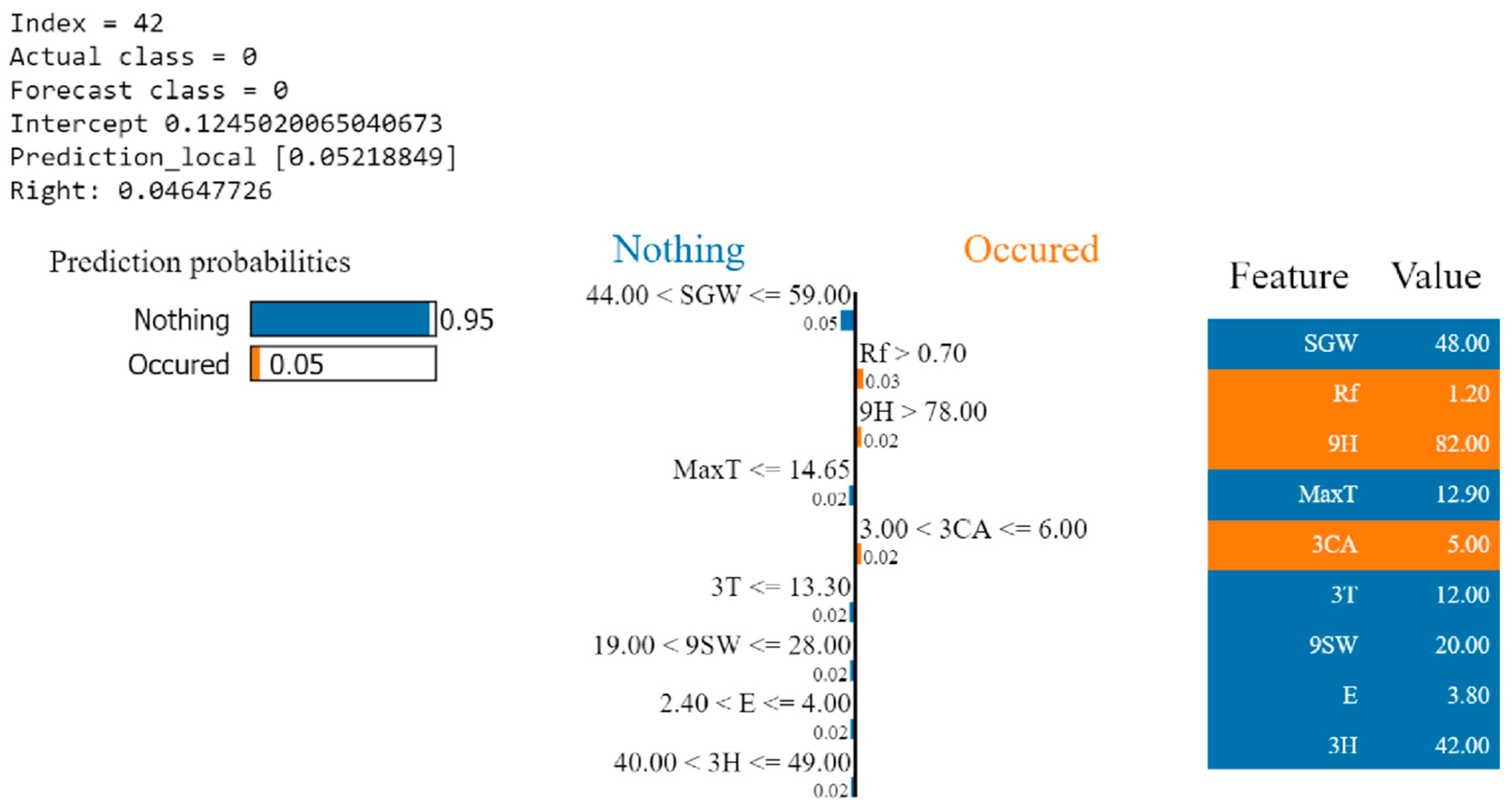
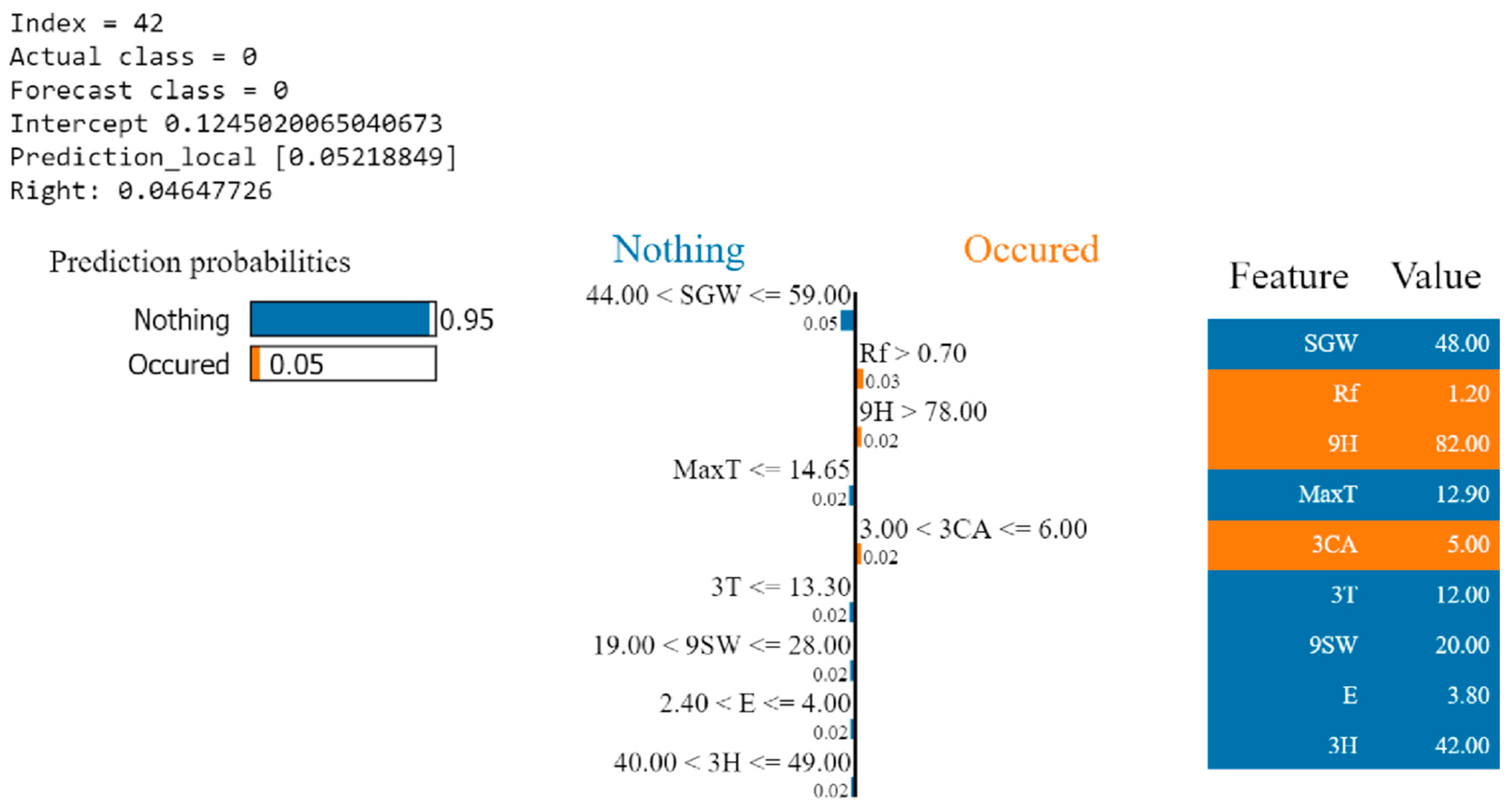
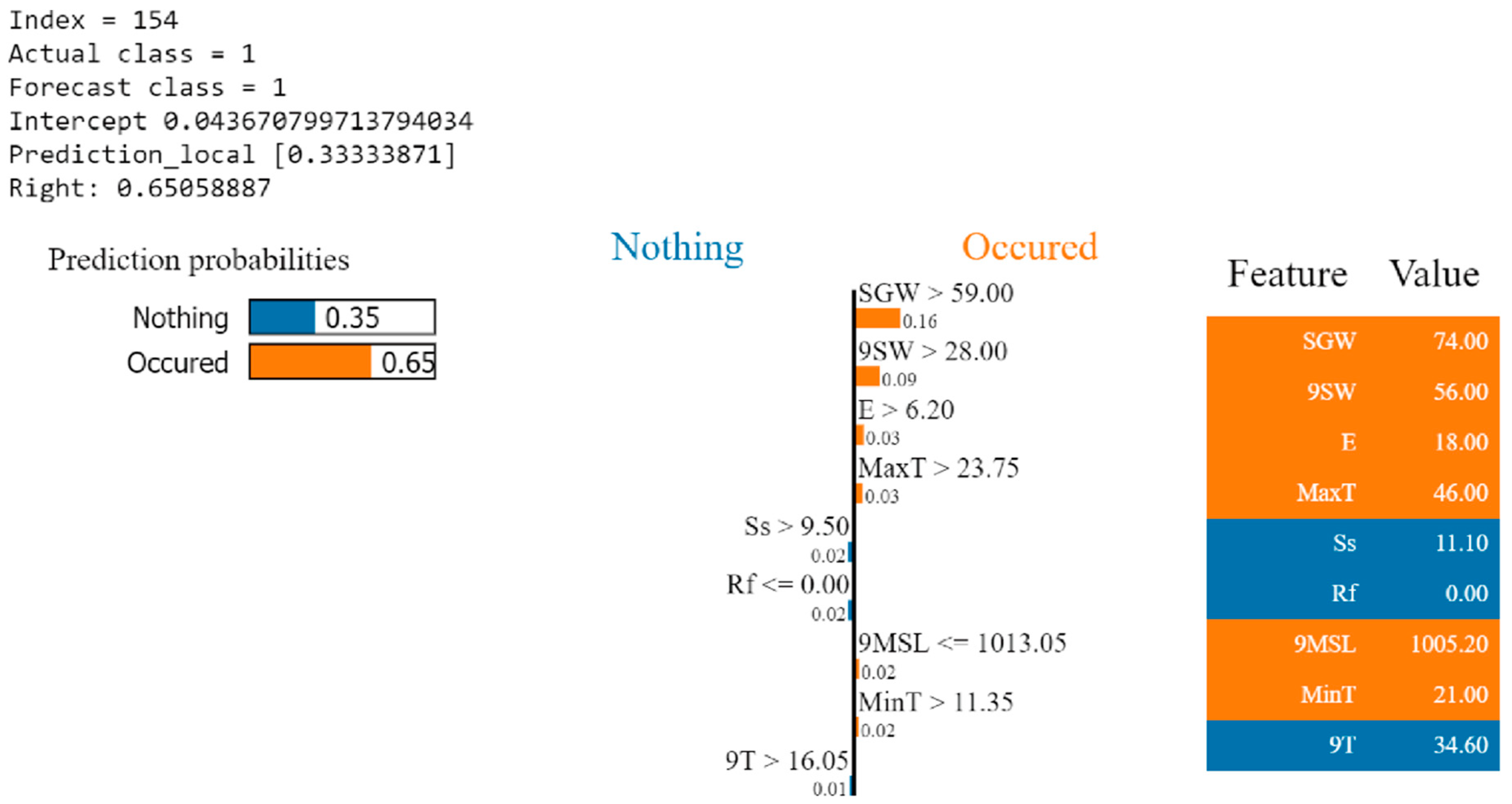
5.2. LIME Explanation
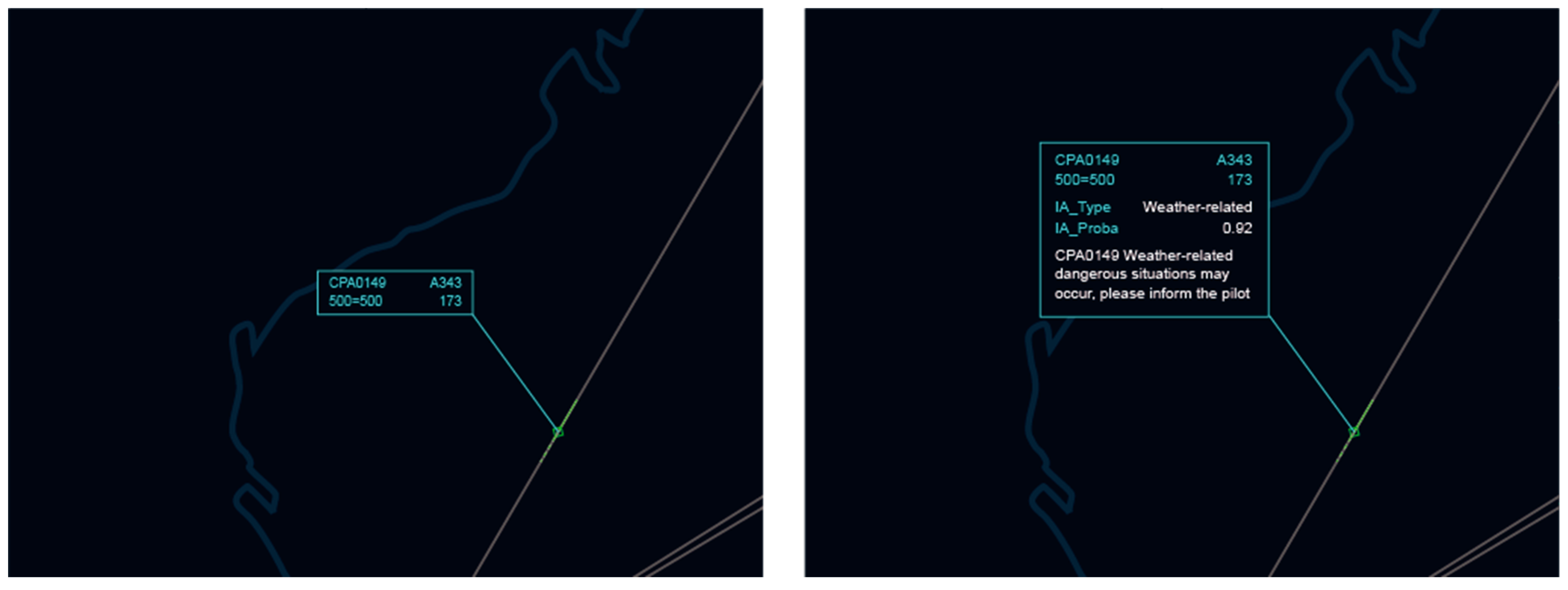
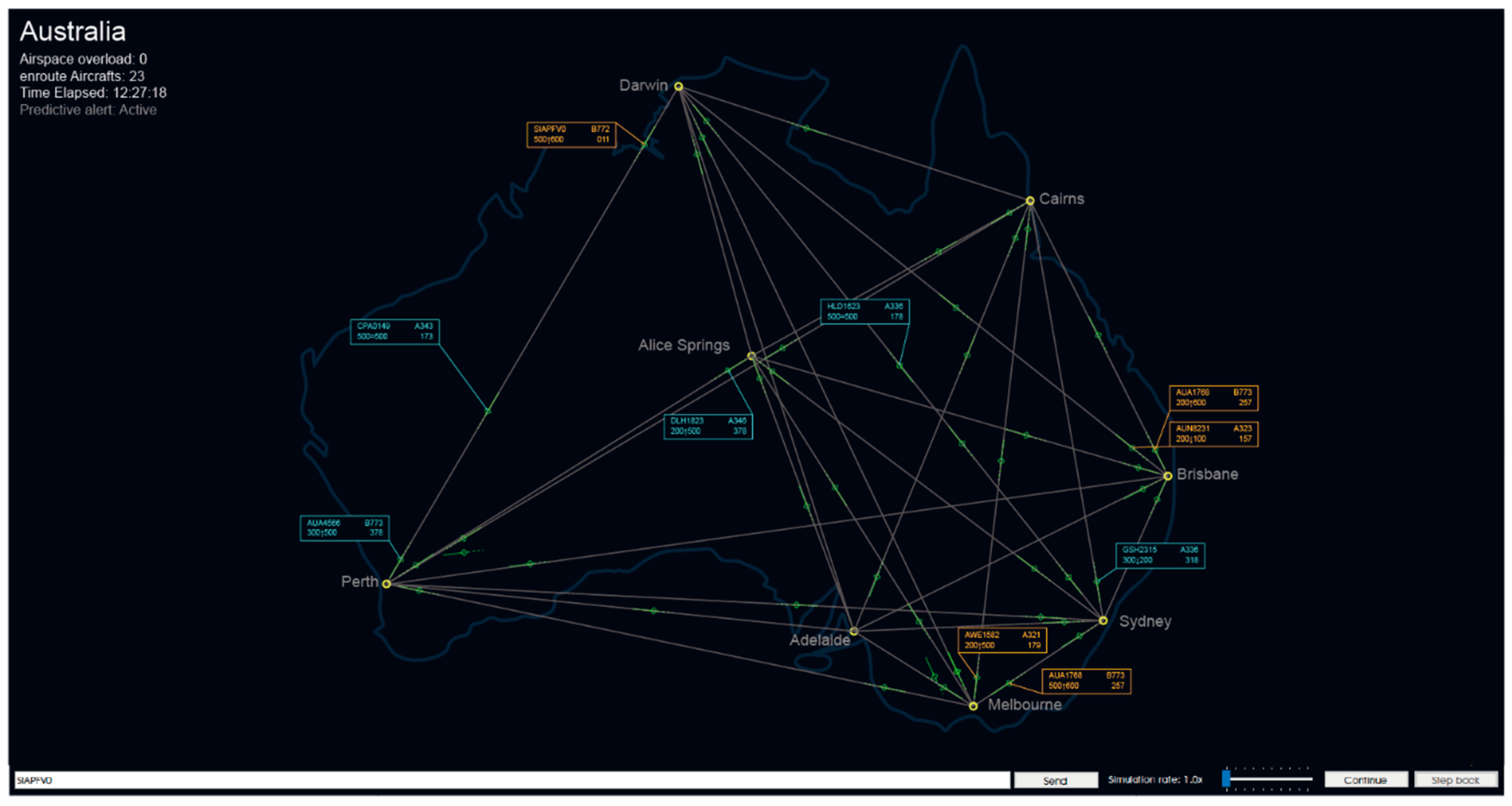
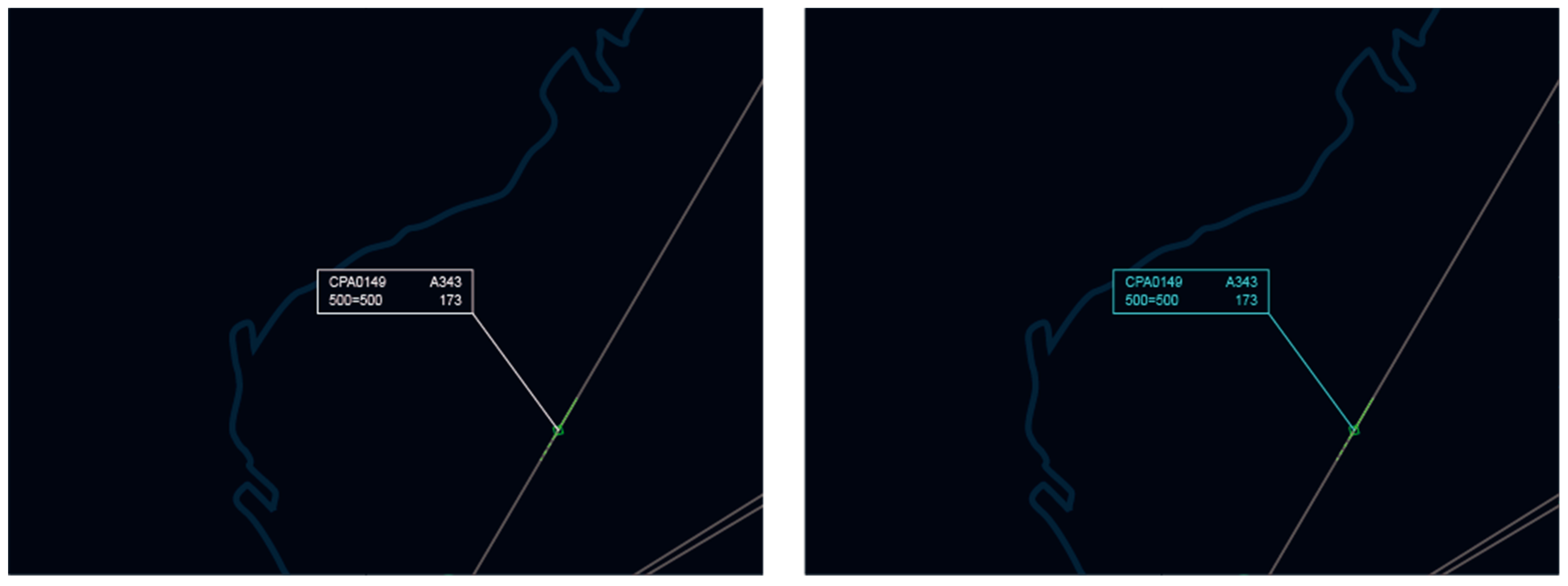
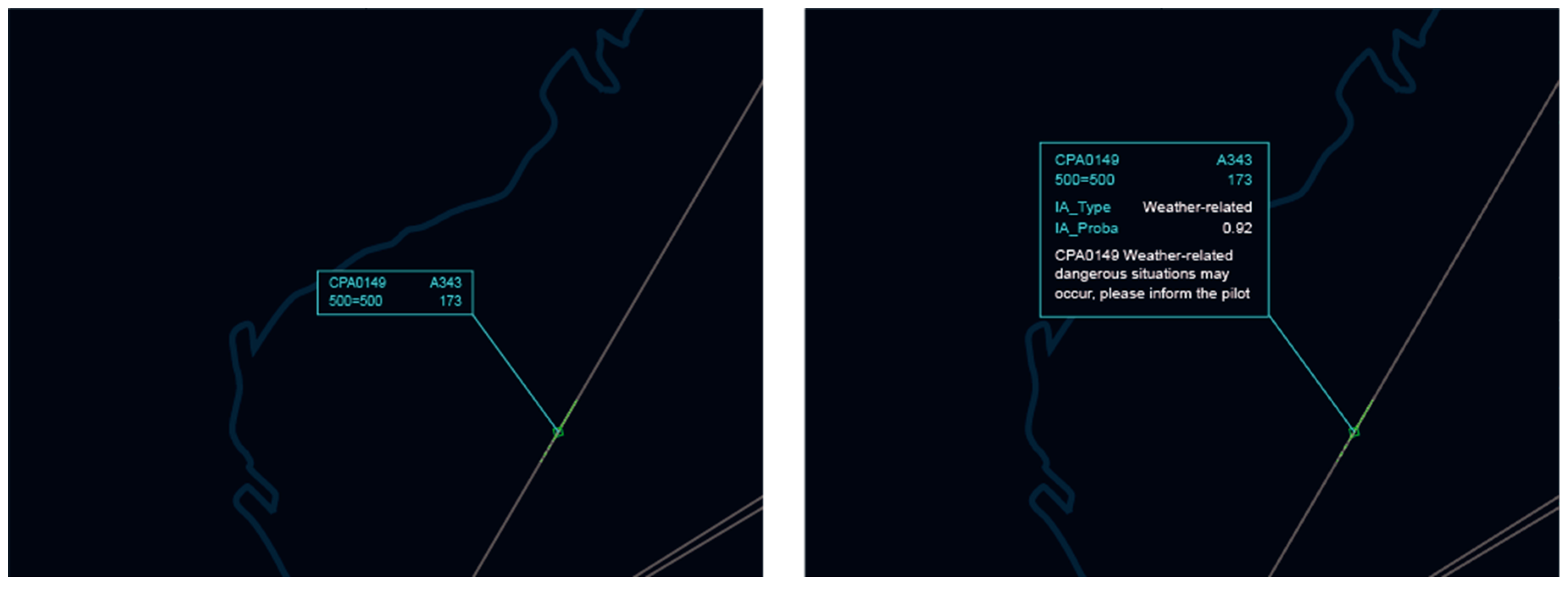
6. Model-Explanation Interface Concept
- Monitoring of automated processing;
- Awareness of anomalies and abnormal states; and
- Handling of emergencies.
- Silent mode: when the prediction of incidents and accidents is below the safety threshold;
- Prompt mode: when the probability of incident or accident is above the safety threshold; and
- Detailed information mode: this can be viewed regardless of status.
7. Conclusions and Future Research
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Gosling, G.D. Identification of artificial intelligence applications in air traffic control. Transp. Res. Part A Gen. 1987, 21, 27–38. [Google Scholar] [CrossRef]
- Crespo, A.M.F.; Weigang, L.; de Barros, A.G. Reinforcement learning agents to tactical air traffic flow management. Int. J. Aviat. Manag. 2012, 1, 145–161. [Google Scholar] [CrossRef]
- Gardi, A.; Sabatini, R.; Ramasamy, S. Multi-objective optimisation of aircraft flight trajectories in the ATM and avionics context. Prog. Aerosp. Sci. 2016, 83, 1–36. [Google Scholar] [CrossRef]
- Kistan, T.; Gardi, A.; Sabatini, R.; Ramasamy, S.; Batuwangala, E. An evolutionary outlook of air traffic flow management techniques. Prog. Aerosp. Sci. 2017, 88, 15–42. [Google Scholar] [CrossRef]
- Pongsakornsathien, N.; Bijjahalli, S.; Gardi, A.; Symons, A.; Xi, Y.; Sabatini, R.; Kistan, T. A Performance-Based Airspace Model for Unmanned Aircraft Systems Traffic Management. Aerospace 2020, 7, 154. [Google Scholar] [CrossRef]
- Kistan, T.; Gardi, A.; Sabatini, R. Machine Learning and Cognitive Ergonomics in Air Traffic Management: Recent Developments and Considerations for Certification. Aerospace 2018, 5, 103. [Google Scholar] [CrossRef] [Green Version]
- Borst, C.; Bijsterbosch, V.A.; Van Paassen, M.M.; Mulder, M. Ecological interface design: Supporting fault diagnosis of automated advice in a supervisory air traffic control task. Cogn. Technol. Work. 2017, 19, 545–560. [Google Scholar] [CrossRef]
- Borghini, G.; Aricò, P.; Di Flumeri, G.; Cartocci, G.; Colosimo, A.; Bonelli, S.; Golfetti, A.; Imbert, J.P.; Granger, G.; Benhacene, R.; et al. EEG-Based Cognitive Control Behaviour Assessment: An Ecological study with Professional Air Traffic Controllers. Sci. Rep. 2017, 7, 547. [Google Scholar] [CrossRef]
- Diffenderfer, P.; Tao, Z.; Payton, G. Automated integration of arrival/departure schedules. In Proceedings of the Tenth USA/Europe Air Traffic Management Seminar, Chicago, IL, USA, 10–13 June 2013. [Google Scholar]
- Hagras, H. Toward Human-Understandable, Explainable AI. Computer 2018, 51, 28–36. [Google Scholar] [CrossRef]
- Sheh, R.; Monteath, I. Defining Explainable AI for Requirements Analysis. KI Künstliche Intell. 2018, 32, 261–266. [Google Scholar] [CrossRef]
- SESAR. JU Webinar: Artificial Intelligence in ATM (Part 2); SESAR (YouTube Channel). 2020. Available online: https://www.youtube.com/watch?v=p_8o8iuc3A0&t=401s (accessed on 2 September 2020).
- Arrieta, A.B.; Díaz-Rodríguez, N.; Del Ser, J.; Bennetot, A.; Tabik, S.; Barbado, A.; Garciag, S.; Gil-Lopeza, S.; Molinag, D.; Benjaminsh, R.; et al. Explainable Artificial Intelligence (XAI): Concepts, Taxonomies, Opportunities and Challenges toward Responsible. AI. Inf. Fusion 2020, 58, 82–115. [Google Scholar] [CrossRef] [Green Version]
- Zhu, J.; Liapis, A.; Risi, S.; Bidarra, R.; Youngblood, G.M. Explainable AI for Designers: A Human-Centered Perspective on Mixed-Initiative Co-Creation. In Proceedings of the 2018 IEEE Conference on Computational Intelligence and Games (CIG), Maastricht, The Netherlands, 14–17 August 2014; pp. 1–8. [Google Scholar]
- Stephen, M. Open-Source AI Bionic Leg Offers a Unified Platform for Prosthetics. Machine Design. 2019. Available online: https://www.machinedesign.com/mechanical-motion-systems/article/21837881/opensource-ai-bionic-leg-offers-a-unified-platform-for-prosthetics (accessed on 14 October 2020).
- Huang, C.; Mezencev, R.; McDonald, J.F.; Vannberg, F. Open source machine-learning algorithms for the prediction of optimal cancer drug therapies. PLoS ONE 2017, 12, e0186906. [Google Scholar] [CrossRef] [Green Version]
- Waller, S.; Chiu, Y.-C.; Ruiz-Juri, N.; Unnikrishnan, A.; Bustillos, B.I. Short Term Travel Time Prediction on Freeways in Conjunction with Detector Coverage Analysis. Available online: https://trid.trb.org/view/859411 (accessed on 31 July 2021).
- Karlaftis, M.; Vlahogianni, E. Statistical methods versus neural networks in transportation research: Differences, similarities and some insights. Transp. Res. Part C Emerg. Technol. 2011, 19, 387–399. [Google Scholar] [CrossRef]
- Botzoris, G.N.; Profillidis, V.A. Modeling of Transport Demand: Analyzing, Calculating, and Forecasting Transport Demand; Elsevier: St. Louis, MO, USA, 2018. [Google Scholar]
- Kwon, J.; Coifman, B.; Bickel, P. Day-to-Day Travel-Time Trends and Travel-Time Prediction from Loop-Detector Data. Transp. Res. Rec. J. Transp. Res. Board 2000, 1717, 120–129. [Google Scholar] [CrossRef]
- Ma, X.; Tao, Z.; Wang, Y.; Yu, H.; Wang, Y. Long short-term memory neural network for traffic speed prediction using remote microwave sensor data. Transp. Res. Part C Emerg. Technol. 2015, 54, 187–197. [Google Scholar] [CrossRef]
- Elith, J.; Leathwick, J.R.; Hastie, T. A working guide to boosted regression trees. J. Anim. Ecol. 2008, 77, 802–813. [Google Scholar] [CrossRef]
- Zhang, Y.; Haghani, A. A gradient boosting method to improve travel time prediction. Transp. Res. Part C Emerg. Technol. 2015, 58, 308–324. [Google Scholar] [CrossRef]
- Dalmau, R.; Ballerini, F. Improving the Predictability of Take-off Times with Machine Learning. In Proceedings of the 9th SESAR Innovation Days, Athens, Greece, 2–5 December 2019; Available online: https://www.sesarju.eu/sites/default/files/documents/sid/2019/papers/SIDs_2019_paper_36.pdf (accessed on 3 October 2020).
- Liang, W.; Luo, S.; Zhao, G.; Wu, H. Predicting Hard Rock Pillar Stability Using GBDT, XGBoost, and LightGBM Algorithms. Mathematics 2020, 8, 765. [Google Scholar] [CrossRef]
- Gu, X.; Han, Y.; Yu, J. A Novel Lane-Changing Decision Model for Autonomous Vehicles Based on Deep Autoencoder Network and XGBoost. IEEE Access 2020, 8, 9846–9863. [Google Scholar] [CrossRef]
- Lundberg, S.M.; Erion, G.; Chen, H.; DeGrave, A.; Prutkin, J.M.; Nair, B.; Katz, R.; Himmelfarb, J.; Bansal, N.; Lee, S.-I. Explainable AI for Trees: From Local Explanations to Global Understanding. arXiv 2019, arXiv:1905.04610. [Google Scholar] [CrossRef]
- Beyer, R. HMI Aspects of Support Tools for Air Traffic Management. IFAC Proc. Vol. 2001, 34, 549–553. [Google Scholar] [CrossRef]
- Arico, P.; Borghini, G.; Di Flumeri, G.; Bonelli, S.; Golfetti, A.; Graziani, I.; Pozzi, S.; Imbert, J.-P.; Granger, G.; Benhacene, R.; et al. Human Factors and Neurophysiological Metrics in Air Traffic Control: A Critical Review. IEEE Rev. Biomed. Eng. 2017, 10, 250–263. [Google Scholar] [CrossRef] [PubMed]
- Ødegård, S.S. Exploring Visualization—Solutions for Air Traffic Control Workflow Productivity Improvement. Master’s Thesis, Department of Informatics, University of Oslo, Oslo, Norway, 2013. Available online: https://www.duo.uio.no/handle/10852/37418 (accessed on 1 October 2020).
- Bourgois, M.; Cooper, M.; Duong, V.; Hjalmarsson, J.; Lange, M.; Ynnerman, A. Interactive and immersive 3D visualization for ATC. In Proceedings of the 3rd Eurocontrol Innovative Research Workshop, Paris, France, 6–8 December 2005. [Google Scholar]
- ICAO. Human Factors Training Manual; ICAO: Montreal, QC, Canada, 1998. [Google Scholar]
- Lim, Y.; Ramasamy, S.; Gardi, A.; Kistan, T.; Sabatini, R. Cognitive Human-Machine Interfaces and Interactions for Unmanned Aircraft. J. Intell. Robot. Syst. 2018, 91, 755–774. [Google Scholar] [CrossRef]
- Lim, Y.; Gardi, A.; Sabatini, R.; Ramasamy, S.; Kistan, T.; Ezer, N.; Vince, J.; Bolia, R. Avionics Human-Machine Interfaces and Interactions for Manned and Unmanned Aircraft. Prog. Aerosp. Sci. 2018, 102, 1–46. [Google Scholar] [CrossRef]
- Pongsakornsathien, N.; Lim, Y.; Gardi, A.; Hilton, S.; Planke, L.; Sabatini, R.; Kistan, T.; Ezer, N. Sensor Networks for Aerospace Human-Machine Systems. Sensors 2019, 19, 3465. [Google Scholar] [CrossRef] [Green Version]
- Chen, T.; Guestrin, C. XGBoost: A Scalable Tree Boosting System. In Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016; pp. 785–794. [Google Scholar]
- Patidar, P.; Tiwari, A. Handling Missing Value in Decision Tree Algorithm. Int. J. Comput. Appl. 2013, 70, 31–36. [Google Scholar] [CrossRef] [Green Version]
- Ribeiro, M.T.; Singh, S.; Guestrin, C. Why Should I Trust You?: Explaining the Predictions of Any Classifier. In Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016; pp. 1135–1144. [Google Scholar]
- Strumbelj, E.; Kononenko, I. An Efficient Explanation of Individual Classifications using Game Theory. J. Mach. Learn. Res. 2010, 11, 1–18. [Google Scholar] [CrossRef]
- Zhao, W.; Joshi, T.; Nair, V.N.; Sudjianto, A. SHAP values for Explaining CNN-based Text Classification Models. arXiv 2020, arXiv:2008.11825. [Google Scholar]
- Chen, Y. Understanding Machine Learning Classifier Decisions in Automated Radiotherapy Quality Assurance; ProQuest Dissertations Publishing: Ann Arbor, MI, USA, 2020. [Google Scholar]
- Meteorology B o. Daily Weather Observations. Available online: http://www.bom.gov.au/climate/dwo/ (accessed on 24 September 2020).
- ATSB. ATSB National Aviation Occurrence Database: Advanced Search. Available online: http://data.atsb.gov.au/AdvancedSearch (accessed on 23 September 2020).
- Laurae. Ensembles of Tree-Based Models: Why Correlated Features Do Not Trip Them—And Why NA Matters. Available online: https://medium.com/data-design/ensembles-of-tree-based-models-why-correlated-features-do-not-trip-them-and-why-na-matters-7658f4752e1b (accessed on 28 September 2016).














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| LIME | SHAP | |
|---|---|---|
| Features | Local Explaination Method; Does not interface with the algorithm inside the black box; Independently generates new samples based on each feature. | Local Explaination Method; Based on game theory; Calculates the importance of additive features for each specific prediction. |
| Advantage | Model-Agnositc method; even if the prediction model changes, LIME is able to make the local explanation. | Supports multiple explain plots; Allows comparative studies between features; Can quickly implement and explain tree-based models. |
| Disadvantage | The explained results are not stable enough, and different interpretation models will produce different results. | Long calculation time, slower interpretation production speed. |
| (a) Full Names to the Abbreviations | |||
|---|---|---|---|
| Abbreviation | Full Name | Abbreviation | Full Name |
| M | Month | 9DW | 9 a.m. wind direction |
| MinT | Minimum temperature (°C) | 9DW2 | 9 a.m. wind direction (index) |
| MaxT | Maximum temperature (°C) | 9SW | 9 a.m. wind speed (km/h) |
| Rf | Rainfall (mm) | 9MSL | 9 a.m. MSL pressure (hPa) |
| E | Evaporation (mm) | 3T | 3 p.m. Temperature (°C) |
| Ss | Sunshine (hours) | 3H | 3 p.m. relative humidity (%) |
| DGW | Direction of maximum wind gust | 3CA | 3 p.m. cloud amount (oktas) |
| DGW2 | Direction of maximum wind gust (index) | 3DW | 3 p.m. wind direction |
| SGW | Speed of maximum wind gust (km/h) | 3DW2 | 3 p.m. wind direction (index) |
| 9T | 9 a.m. temperature (°C) | 3SW | 3 p.m. wind speed (km/h) |
| 9H | 9 a.m. relative humidity (%) | 3MSL | 3 p.m. MSL pressure (hPa) |
| 9CA | 9 a.m. cloud amount (oktas) | IA | Incident and accident (Binary) |
| (b) Wind Direction Codes | |||
| Code | Wind Direction | Code | Wind Direction |
| 1 | N | 9 | S |
| 2 | NNE | 10 | SSW |
| 3 | NE | 11 | SW |
| 4 | ENE | 12 | WSW |
| 5 | E | 13 | W |
| 6 | ESE | 14 | WNW |
| 7 | SE | 15 | NW |
| 8 | SSE | 16 | NNW |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, Y.; Pongsakornsathien, N.; Gardi, A.; Sabatini, R. Explanation of Machine-Learning Solutions in Air-Traffic Management. Aerospace 2021, 8, 224. https://doi.org/10.3390/aerospace8080224
Xie Y, Pongsakornsathien N, Gardi A, Sabatini R. Explanation of Machine-Learning Solutions in Air-Traffic Management. Aerospace. 2021; 8(8):224. https://doi.org/10.3390/aerospace8080224
Chicago/Turabian StyleXie, Yibing, Nichakorn Pongsakornsathien, Alessandro Gardi, and Roberto Sabatini. 2021. "Explanation of Machine-Learning Solutions in Air-Traffic Management" Aerospace 8, no. 8: 224. https://doi.org/10.3390/aerospace8080224
APA StyleXie, Y., Pongsakornsathien, N., Gardi, A., & Sabatini, R. (2021). Explanation of Machine-Learning Solutions in Air-Traffic Management. Aerospace, 8(8), 224. https://doi.org/10.3390/aerospace8080224