1. Introduction
The great potential of small satellites is increasingly recognized. The integration of satellites in both existing and emerging networks allows the development of new services, such as aeronautical ad hoc networking [
1] and the Internet of Things (IoT) in Smart Cities [
2]. Moreover, low-earth orbit (LEO) small-satellite constellations are a key enabler in 5G and post 5G networks to provide ubiquitous network coverage [
3]. Many research institutions as well as companies are investigating the challenges and possibilities imposed by small satellites, sometimes by using their own small-satellite space missions. The Space Systems Academic Group (SSAG) at the Naval Postgraduate School (NPS) in Monterey, CA, has been building and operating small satellites for many years. Especially on the PROPCUBE mission, the need for reliable signal presence detection arose in two use cases: For continuous health monitoring and for frequency correction. Health monitoring is extremely important in the early stages of a satellite’s life to verify its successful deployment, the so-called “bringing into use”. Moreover, when operating the satellite, signal presence detection can be used to provide an accurate Doppler shift estimate at low elevation angles. Hence, the establishment of the actual communication link can be performed earlier in an overflight and successful signal synchronization and demodulation are facilitated. In general, techniques for signal presence detection can be applied in the context of both civil and military applications, such as cognitive-radio concepts, to provide an effective spectrum usage. In 5G and beyond 5G networks, satellites will be integrated into the radio access networks to enable seamless communication over large distances and to provide global coverage. To this end, several work items have been recently started by the 3rd Generation Partnership Project (3GPP) that investigate the seamless transmission of the new radio (NR) waveforms via non-terrestrial relays [
4]. In this context it has been reported that the high Doppler shifts introduced by LEO satellites require coarse compensation measures in addition to the carrier frequency synchronization of NR. In [
5], Doppler compensation via Global Navigation Satellite System (GNSS) data is proposed, leading to a residual Doppler estimation error on the order of kilohertz due to positioning errors. To implement low sub-carrier spacings and thus to ensure an efficient spectrum usage, spectral correlation can be exploited to compensate for the residual Doppler estimation error.
In contrast to conventional signal detection problems, LEO satellite signal detection is complicated by physics: The small satellite size implies small transmit power. The signal power received at the ground station varies greatly in the course of an overflight due to the change of distance and due to multipath propagation effects leading to a dynamic signal-to-noise ratio (SNR) at the receiver. Moreover, a substantial time-varying Doppler shift is introduced by the high satellite velocities at LEO causing uncertainty in the frequency domain. In many scenarios, no exclusive frequencies are assigned to the communication link resulting in an environment of high interference, which is mostly ground-based and, therefore, tends to have high energy. The effects of terrestrial interference on aeronautical satellite communication have been studied in [
6], pointing out substantial impacts despite receiver antenna directivity. In the future, an increase of space-based interference is expected due to new large satellite constellations, exacerbating the detection problem.
Conventional signal detection techniques, such as energy-based detection [
7], are prone to raise false alarms under interference. The dynamic range of signal power received at the ground station complicates thresholding approaches in general. Signal detection achieved by pilot insertion or preambles requires at least coarse synchronization of the signal in frequency and time, which is hard to accomplish for low SNRs. New methods that are able to perform reliably in the described environment must be developed.
In this paper, we propose a novel detector with an adaptive detection statistic tailored to the LEO small satellite scenario based on the cyclostationary nature of communication signals. Cyclostationary approaches are considered to be tolerant against noise and interference since noise does not exhibit cyclostationarity and different signals can be distinguished by their different cyclic features. Cycle detectors as first proposed in [
8] exploit second-order cyclostationarity. For scenarios with non-stationary noise, performance advantages of cycle detectors over energy-based detectors have been shown [
9]. However, the time-varying Doppler shift of the LEO satellite channel complicates the estimation of cyclic features. In fact, time-varying frequency offsets tend to destroy the cyclostationarity exhibited in the received signal. In this paper, we demonstrate that knowledge about the orbital mechanics of LEO satellites enables the estimation of cyclic features. Although the concept can be applied to many modulation schemes, in this paper we focus on Gaussian frequency-shift keying (GFSK) modulated signals. GFSK is used in technologies like SigFox, a candidate for the integration of 5G into satellite networks [
10]. It combines excellent power efficiency with acceptable bandwidth efficiency [
11]. Moreover, GFSK belongs to the more complex class of non-linear modulation schemes with 0 dB peak-to-average power ratio, it can be decoded with very low-complexity linear phase-shift-keying receivers. Hence, an adaptive detection statistic for GFSK modulated signals based on a derivation of the ideal spectral correlation function (SCF) is proposed to cope with the dynamic power range of the received signal. The proposed detector is tested on real-world data, and effects of the LEO satellite channel at 914 MHz, i.e., Doppler shift, dynamic range of received power and interference, are presented.
The remainder of this paper is structured as follows: The PROPCUBE mission is introduced first. In
Section 2.1, a brief history is provided, its research goals are explained, the challenges of the communication link are pointed out. An analysis of the given communication link and a channel model is given in
Section 2.2.
Section 3.1 introduces the SCF, which is then tailored to the special case of GFSK modulated signals. To be able to estimate cyclic features for signals with time-varying Doppler rates, knowledge about the LEO is exploited in
Section 3.3. The core of the proposed detector, its adaptive detection statistic, is proposed in
Section 3.4. The detector performance is evaluated on both simulated and real-world data in
Section 4.
2. Scenario and Communication Link
2.1. The PROPCUBE Mission
The cyclostationary detector developed as part of this research was tested against three identical small satellites in LEO called PROPCUBEs. The PROPCUBEs were a technology demonstration for the Naval Research Laboratory. Each satellite aided in mapping the Earth’s ionosphere by carrying a calibrated radio signal source and radiating over specific ground stations instrumented to analyze these signals as they were distorted by the ionosphere. The satellites were operated by NPS and have been utilized in numerous research projects including the one described in this paper. Given cost limitations, the satellites were launched as secondary payloads. One common form factor for such free-flying payloads is the CubeSat, an international standard by which each satellite measures in multiples of 10 cm and 1 kg “units”, or simply “U”. Common sizes for CubeSats range from 1U to 12U. The PROPCUBE satellites were each 1U and weighing approximately 1 kg. Two of the satellites launched in 2015 aboard the NROL-39 mission, and one launched in 2017 aboard the CRS-8 mission to the International Space Station. Given the size of a 1U CubeSat, there is very little onboard power generation from its solar cells. The limited power generation therefore severely restricts the power system and its ability to operate its other subsystems such as the flight computer and communications systems. These satellites each included two radios; the payload radio used for the ionospheric experiment, and the spacecraft bus radio used for command and control. The payload radio was only used for occasional scientific experiments and did not represent a challenge for signal detection given its continuous wave (CW) signal and repeating low bandwidth modulated signal. However, the command and control downlink presented numerous challenges for detection and demodulation. The factors complicating the downlink included a rotating satellite (the satellites had no active attitude control), only 1.5 Watts of maximum radio transmission power, a 914 MHz center frequency, which was subject to substantial ground-based interference, and low-cost yagi ground antennas tasked with tracking these satellites. The result was a low-performing downlink, which often resulted in dropped packets and lost satellite heath data. The uplink was not an area of concern given that the ground stations were limited to 100 W of power at a center frequency of 450 MHz and could therefore utilize high power amplifiers (HPAs), which closed the link to the LEO satellite with a substantial margin. One of the most valuable lessons learned from the mission was to avoid the 902–928 MHz ISM band for future downlinks due to the limitations in licensed transmission power and competing signals on the ground. The PROPCUBE mission was assigned this band due to ease of licensing; however, in subsequent programs the team has secured licenses in dedicated universal S-band (USB) channels, which experience less terrestrial interference and allow for more bandwidth.
Development of the cyclostationary detection algorithm was motivated by the need to overcome the weak downlink signal to extract mission data that would otherwise be lost. Detecting the presence of signal was important given that mission operations were mostly performed without operators sitting on the console. If an attempted contact was not able to demodulate data, a detection of signal would at least inform the operators that the satellite was functioning and available for future contacts. A lack of detected signal could trigger troubleshooting procedures, which would involve resetting the flight computer and attempting to clear common fault states “in the blind” from the ground until a downlink was re-established. These recovery techniques were used relatively often over the course of the mission. The fault states were due to known software and hardware issues, as well as occasional environmental effects such as radiation-induced single event upsets.
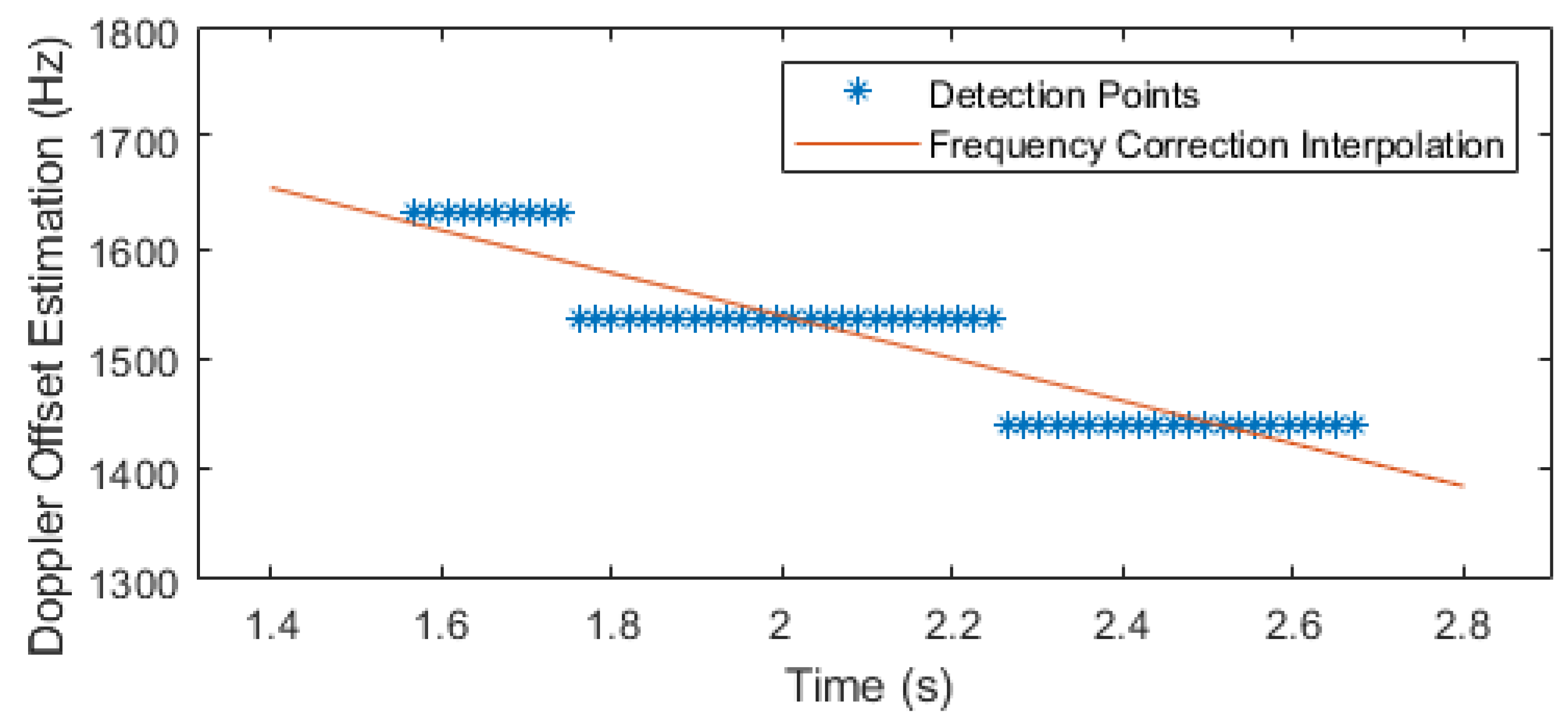
Using a brute-force energy-based signal detection technique was not feasible given the substantial radio frequency interference at each ground station. A signal unique to the satellite had to be found. Additionally, the weak signals were subject to a Doppler shift, as with any satellite, and though predictable, were calculated open-loop using the satellites’ estimated ephemeris, not the real-time shift as observed by the ground station. The difference between the two often ranged from 0.5 to 2 kHz and had the potential to affect the efficacy of the demodulation software. The cyclostationary technique was able to extract the real instantaneous Doppler shift for more precise frequency estimation, resulting in a higher likelihood of demodulation.
2.2. Communication Link
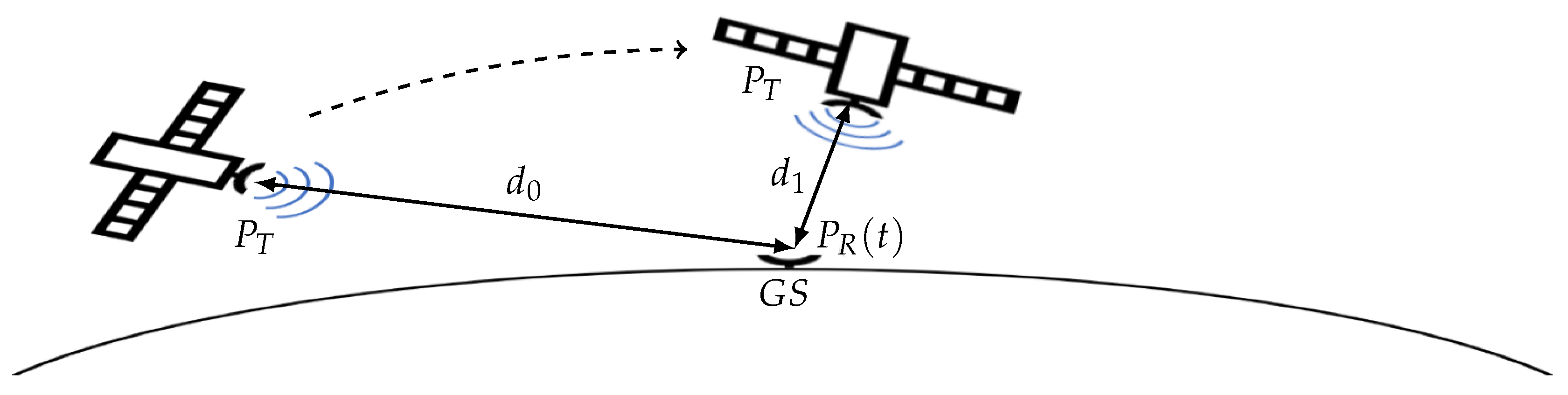
An illustration of the communication link is provided in
Figure 1. The channel is considered to be line-of-sight (LoS) and multipath effects are not taken into account due to the directivity of the ground station (GS) antenna, which is following the satellite’s position in the course of an overflight. Ground reflections are neglected since the first contact of a satellite occurs at an elevation angle of 30
. The satellite is assumed to have a constant transmit power
, whereas the power
of the received satellite signal
changes due to the change of distance
d from the satellite to the ground station. Taking stationary white Gaussian noise (WGN)
of variance
into account leads to a dynamic range of SNR at the GS.
Considering also interference
of arbitrary characteristics and power
I, which is received due to high energy despite the ground-station antenna pattern, yields the received signal
. Therefore, the received signal is composed of three components
and the SINR is defined by the ratio of received signal power
divided by the sum of interference power
I and noise power
.
In the PROPCUBE downlink, a GFSK modulated signal with modulation index
and a symbol rate of
is used. The signal is transmitted in the ISM-band at 914 MHz via a dipole antenna with a power
dBW. The overall link budget at a distance close to the zenith, corresponding to
in
Figure 1, yields a received power level of approximately
dBm with all gains and losses as stated in
Table 1.
To illustrate that this is a typical link budget, the received signal power
in captured data was estimated. The noise floor in the signal recording introduced by
was approximated to be thermal noise amplified only by the noise figure of the low noise amplifier (LNA). This is a valid approximation, since the noise figure of the entire receiver is dominated by the noise figure of the LNA according to the Friis formula [
12]. Therefore, the overall noise figure was assumed to be 1.4 dB at 914 MHz corresponding to the LNA model Mini Circuits ZQL-900MLNW+ (13 Neptune Ave Brooklyn, NY 11235, USA). At an estimated SNR of 10.3 dB in a scenario close to the zenith, the received signal power results in
dBm, which matches the above-mentioned forecast.
In
Figure 2 and
Figure 3, spectrograms of typical PROPCUBE bursts are presented. The GFSK lower and upper tone, as introduced in
Section 3.2, can be observed from 0.23 to 1.23 s. The burst in
Figure 2 was transmitted early in an overflight at an elevation angle of 35
, which corresponds to a Doppler offset of 16.7 kHz. The SNR was estimated to be 0.1 dB when interference seemed to be temporarily absent. In contrast, the SNR for the burst transmitted close to the zenith in
Figure 3 was estimated to be 10.3 dB. Since the Gaussian noise component
is assumed to be stationary and the satellite transmits with constant power
, the change of received signal power is solely based on the change of distance from the satellite to the GS.
It becomes obvious that conventional thresholding approaches are not suitable in this environment. This corresponds to the experience of prior projects carried out in the SSAG, using variations of energy-based detection or spectral-line pair picking in the described context. The proposed detector must be able to cope with great changes in received signal power at the same time as minimizing the susceptibility to false alarms due to high power interference. Stated as a hypothesis testing problem, the detector must be able to reliably yield hypothesis
or
defined by:













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}