
Optimal Geno-Fuzzy Lateral Control of Powered Parachute Flying Vehicles


Abstract
:1. Introduction
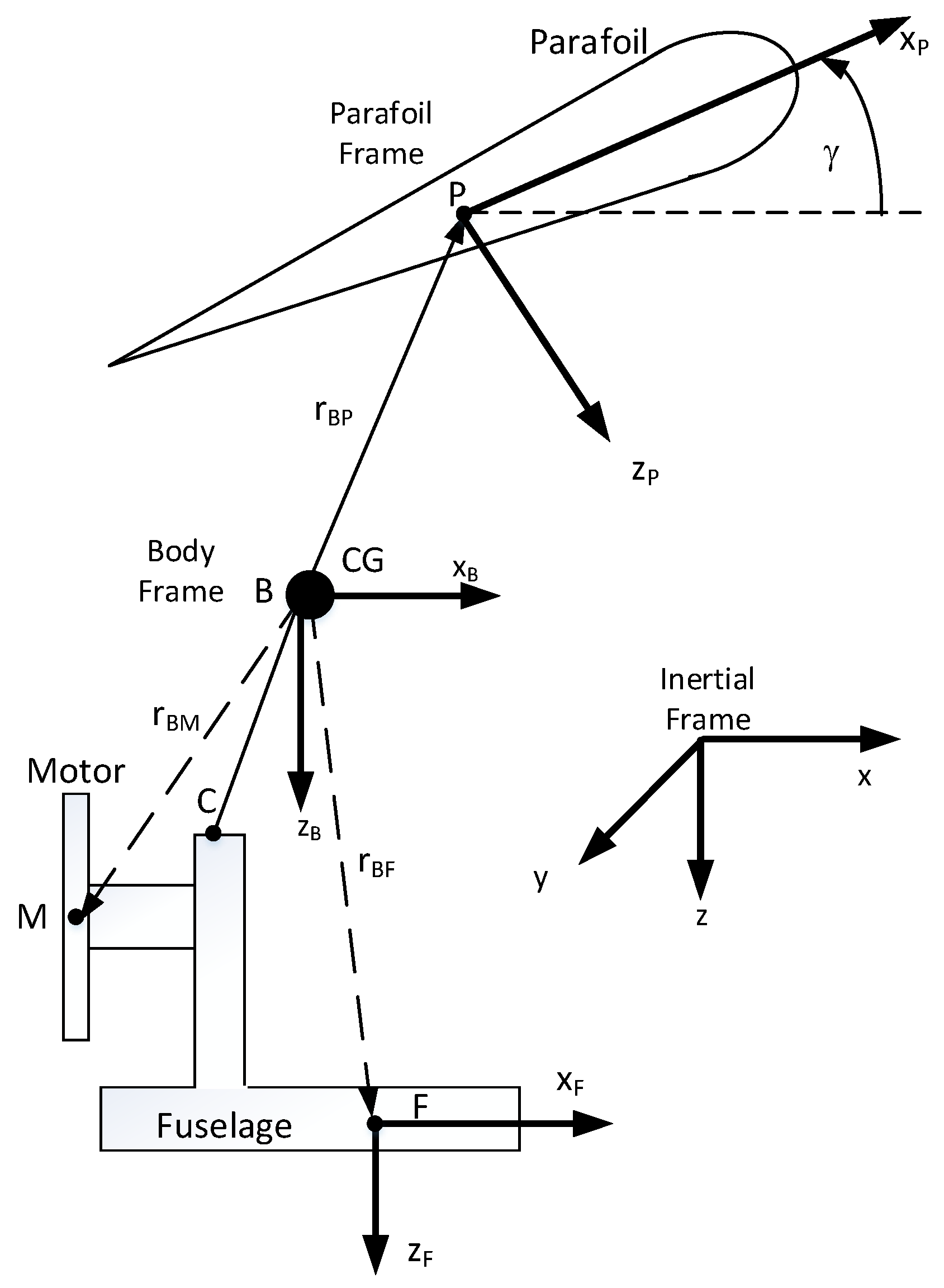
2. Mathematical Modeling
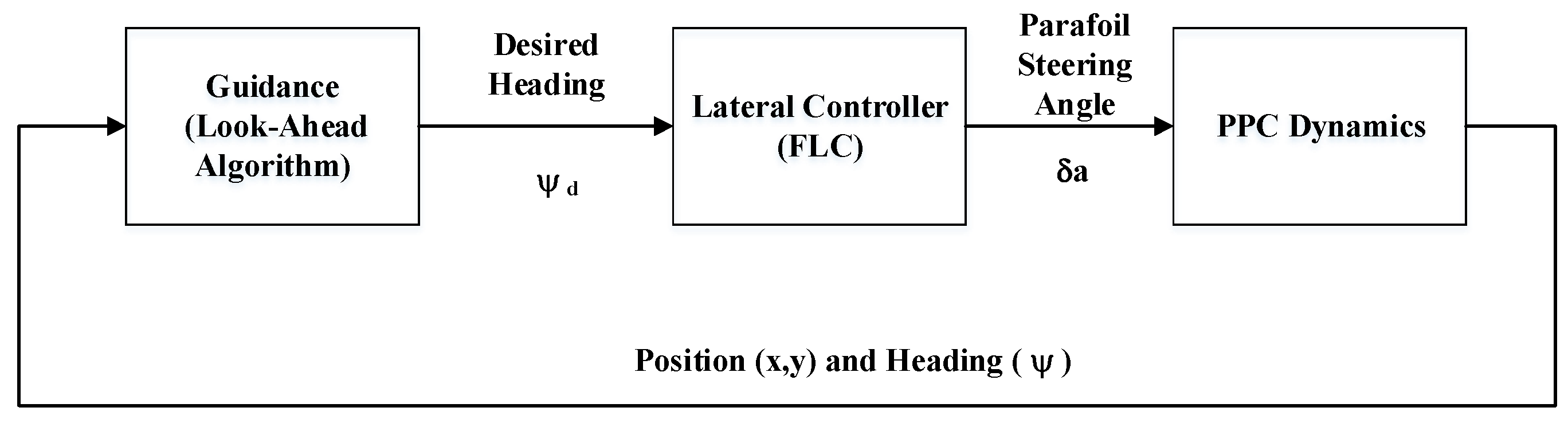
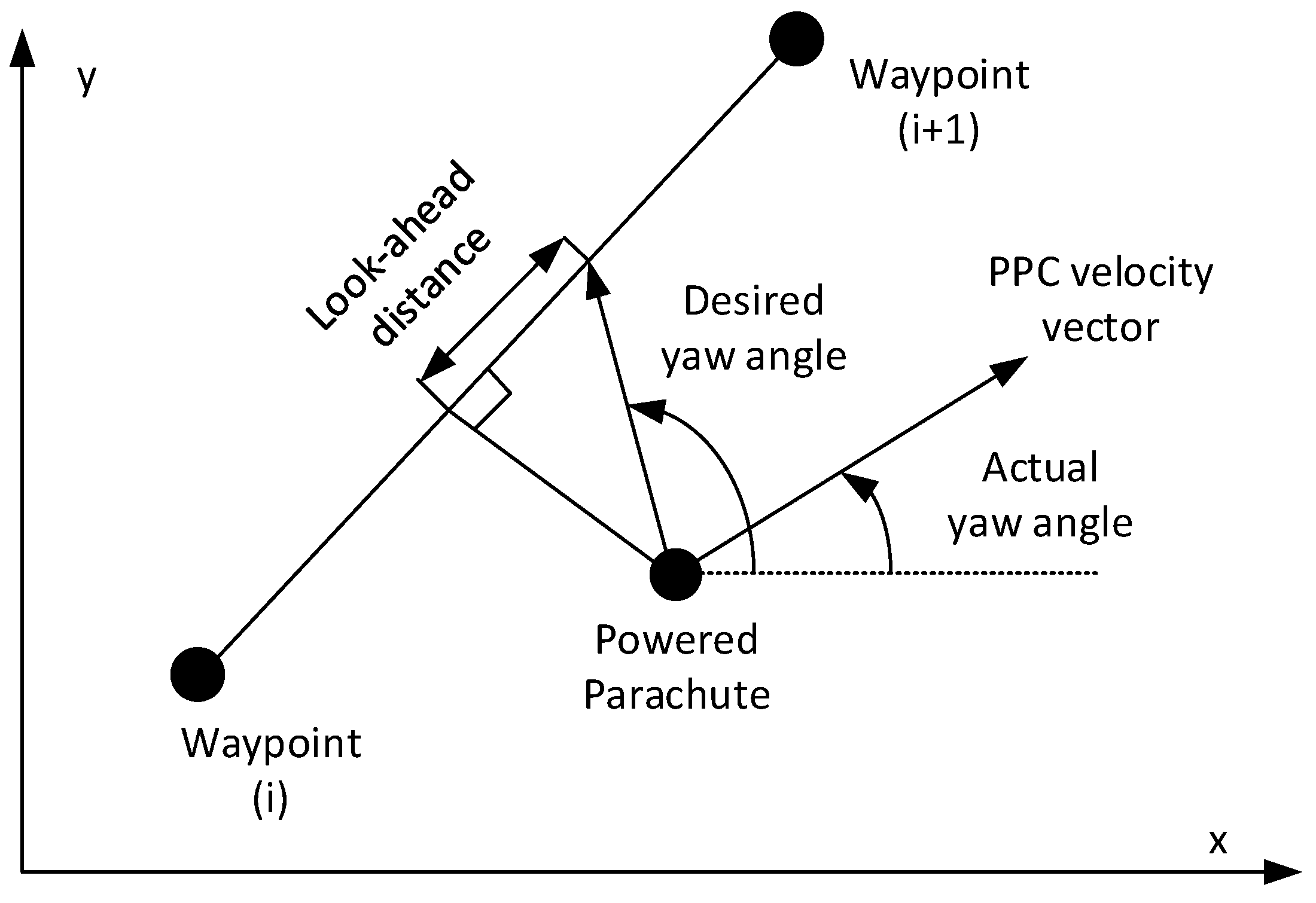
3. Controller Design
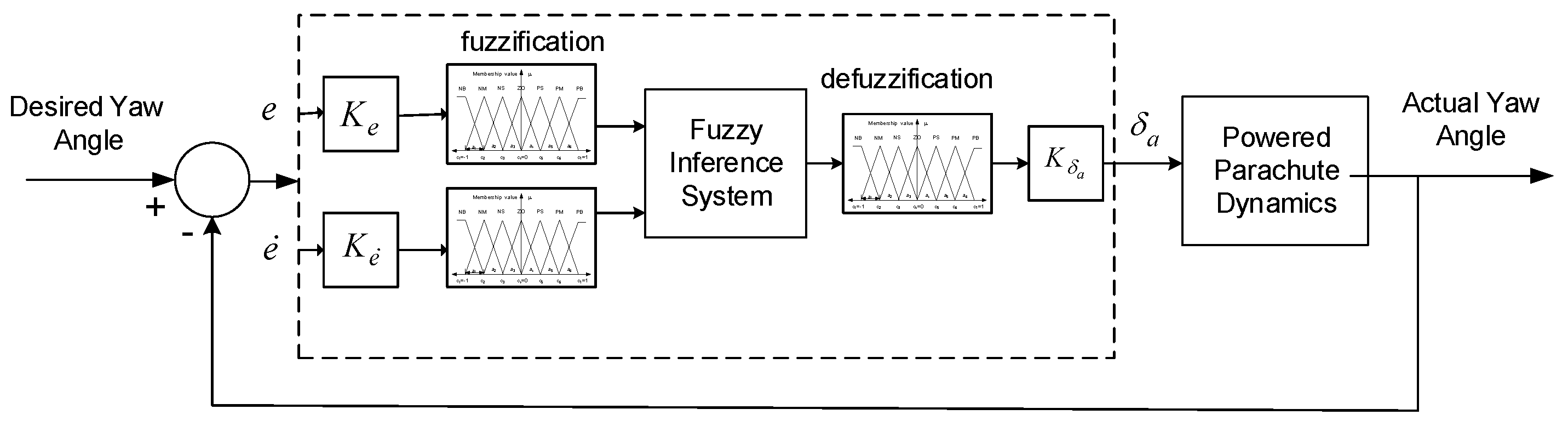
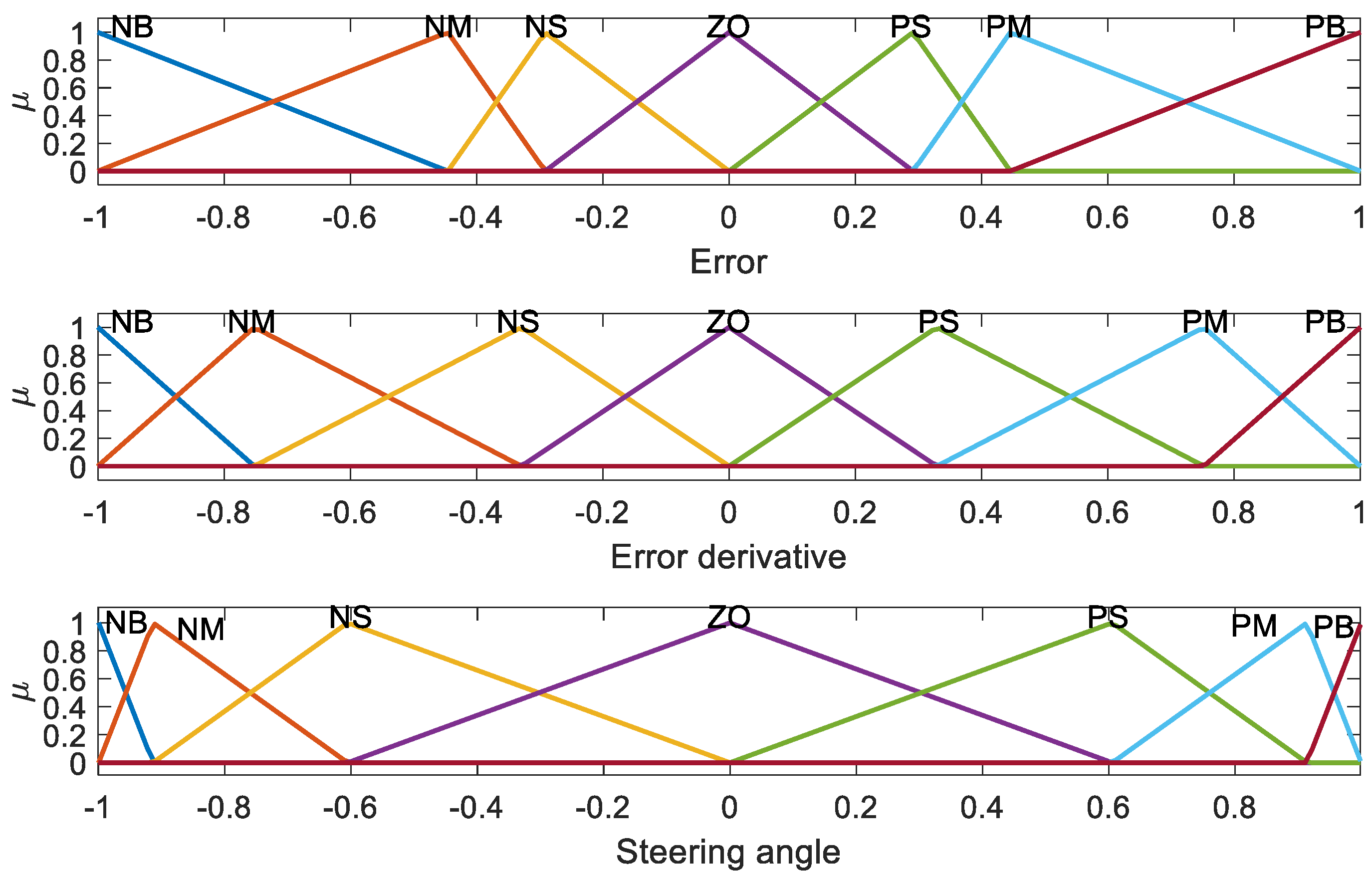
FLC Design
4. Simulation Results
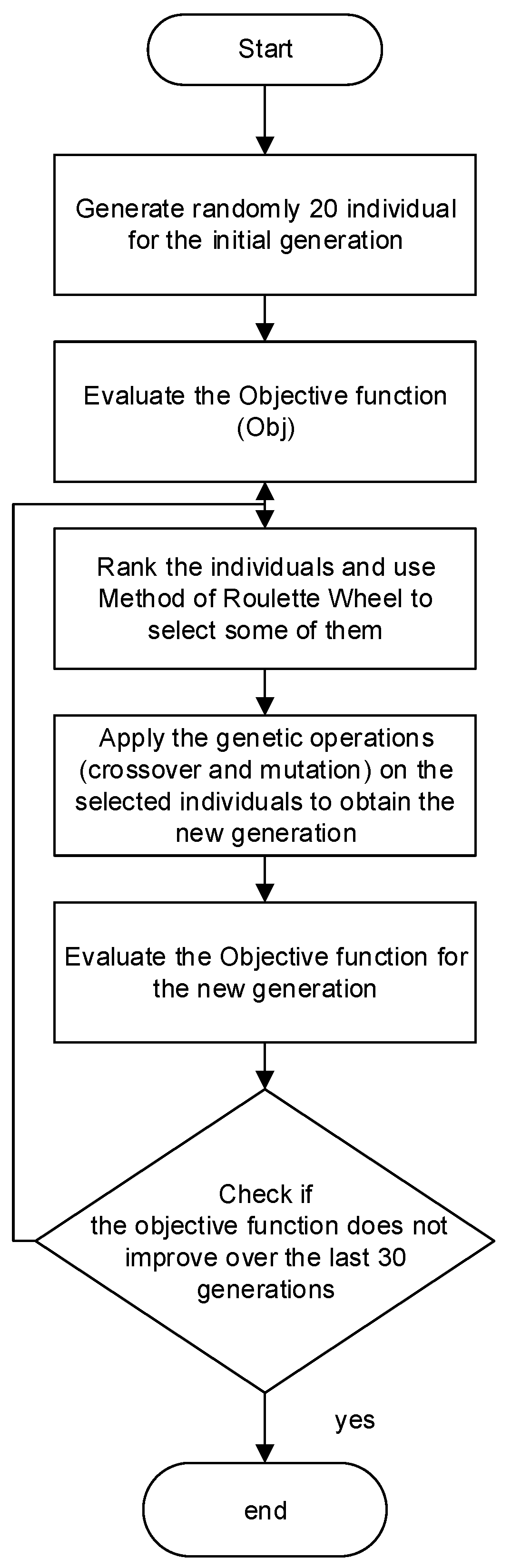
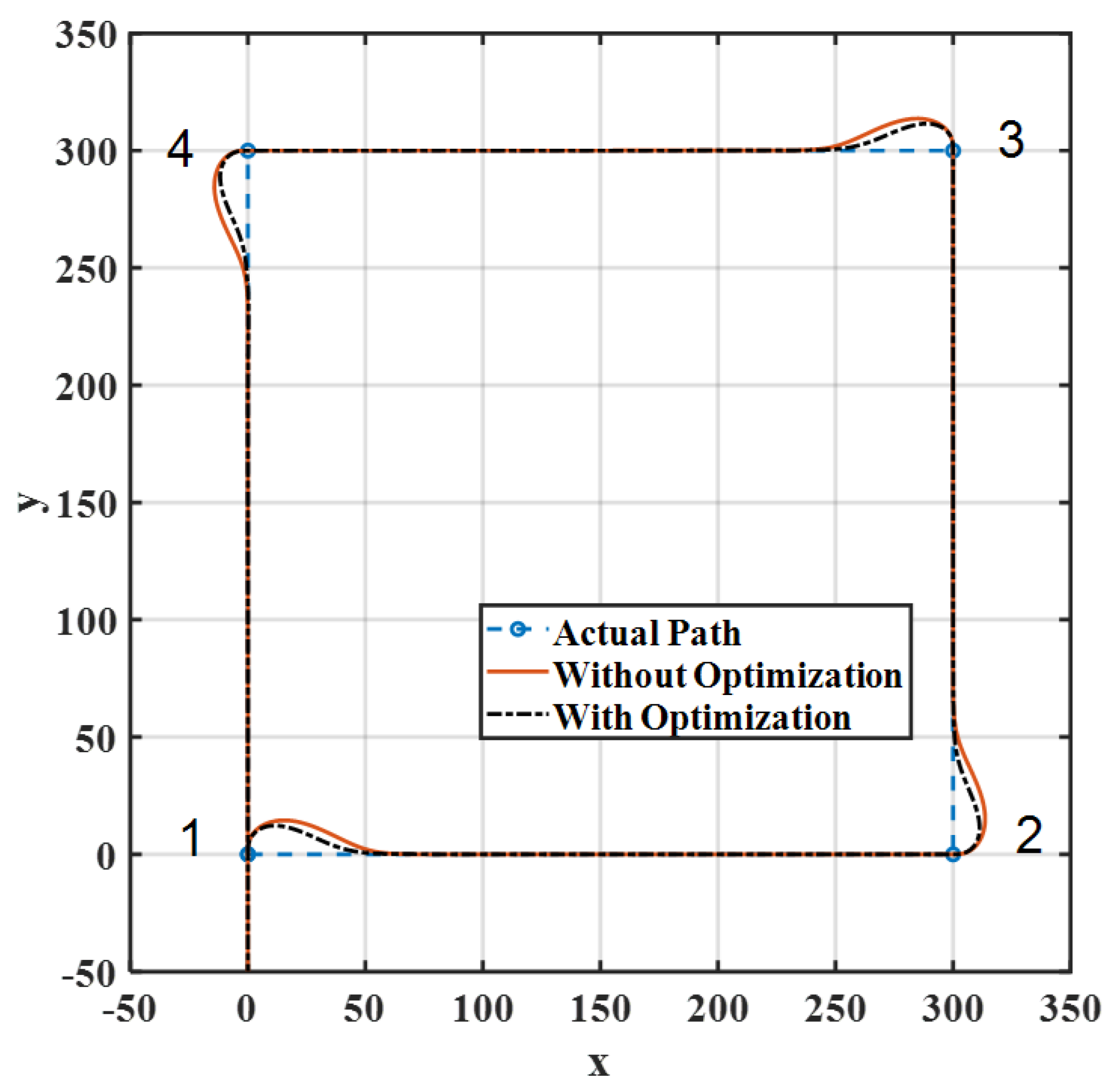
4.1. Optimization
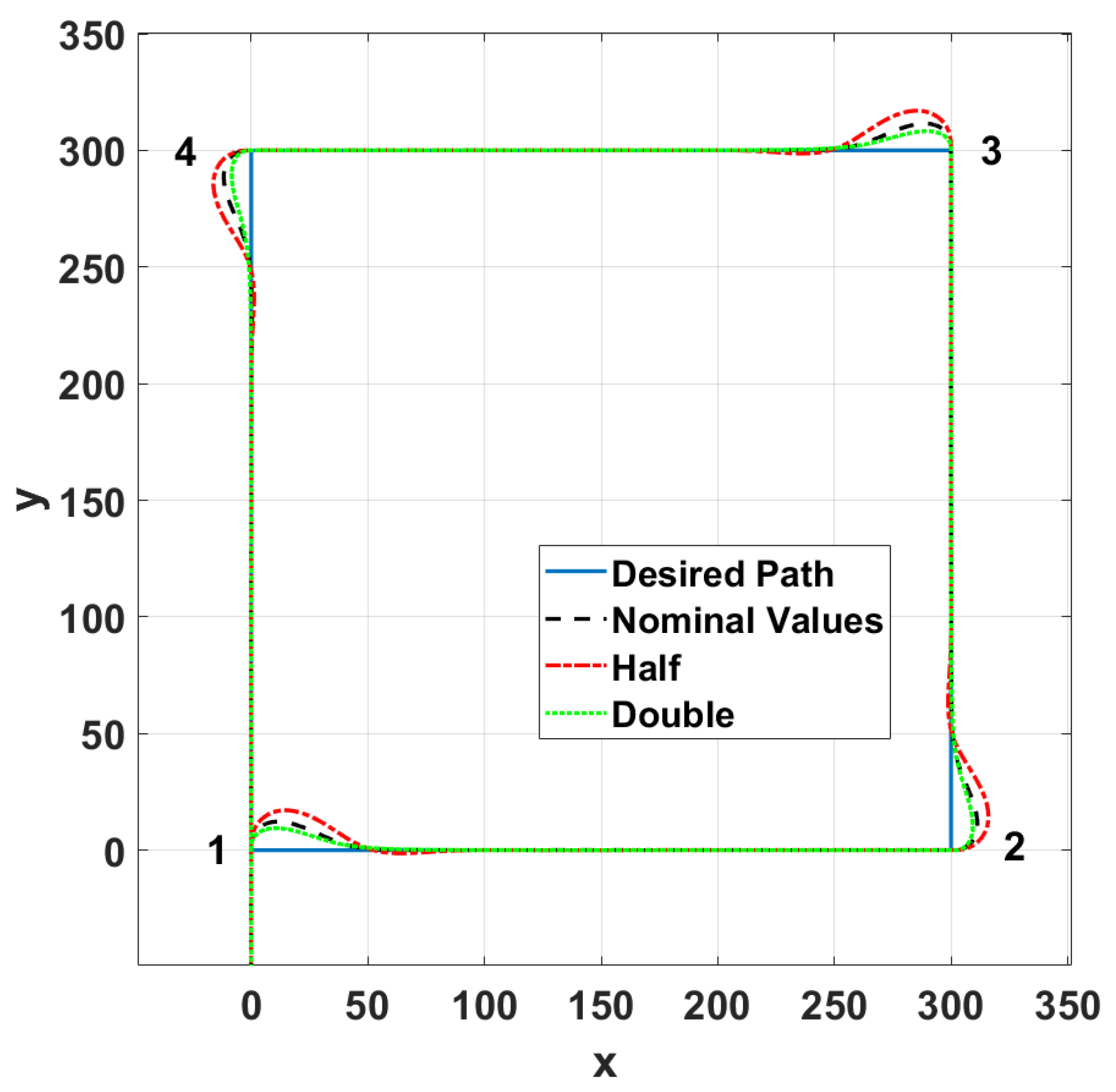
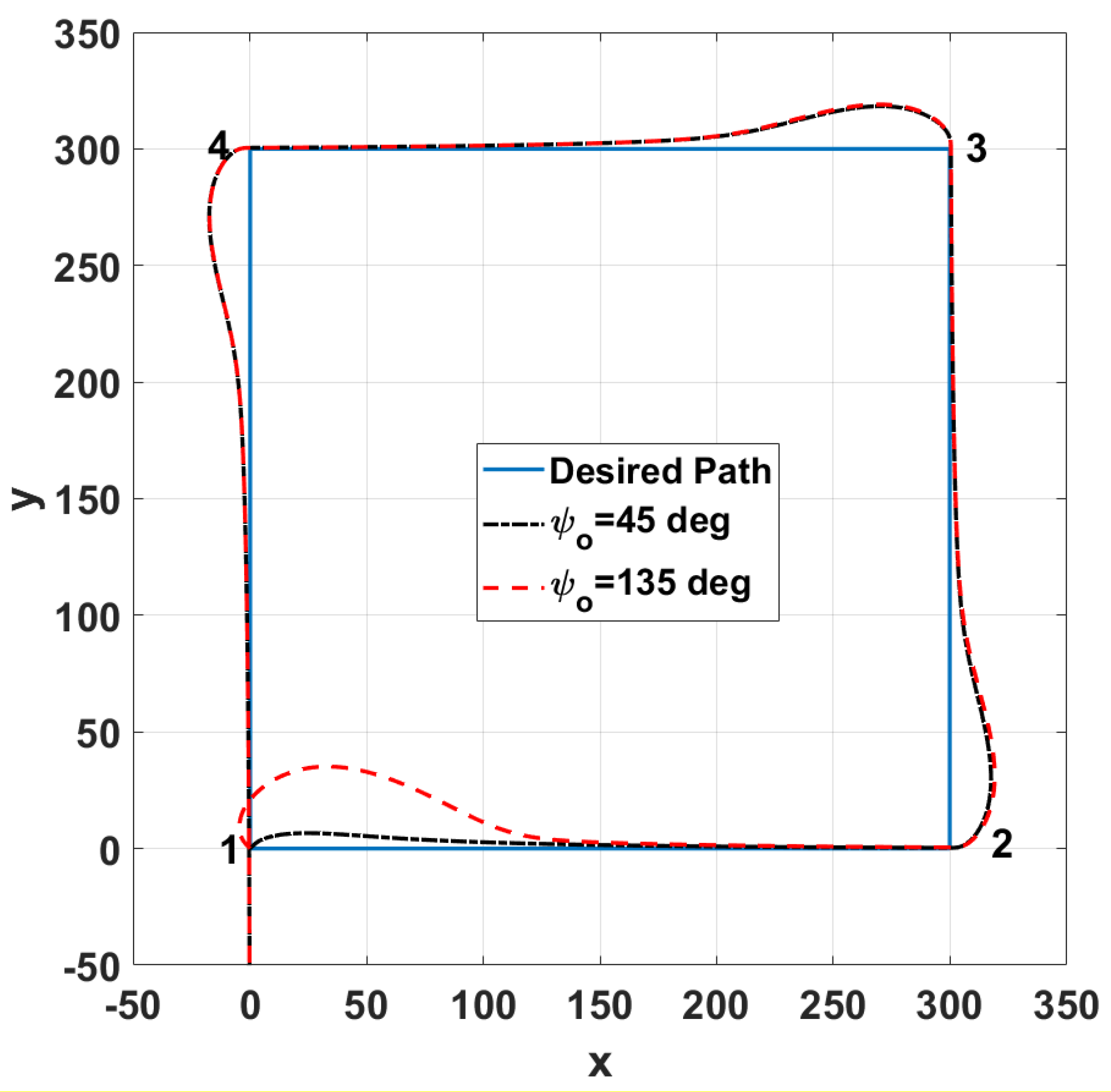
4.2. Robustness
5. Conclusions
Funding
Acknowledgments
Conflicts of Interest
References
- Bian, Y.; Jiang, T.; He, W. On the Development of Autonomous Powered Parachute. In Proceedings of the 2007 8th International Conference on Electronic Measurement and Instruments, Xian, China, 16–18 August 2007; pp. 4-387–4-392. [Google Scholar]
- Chambers, J.R. Longitudinal Dynamic Modeling and Control of Powered Parachute Aircraft. Master’s Thesis, Rochester Institute of Technology, Rochester, NY, USA, 2007. [Google Scholar]
- Devalla, V.; Prakash, O. Developments in unmanned powered parachute aerial vehicle: A review. IEEE Aerosp. Electron. Syst. Mag. 2014, 29, 6–20. [Google Scholar] [CrossRef]
- Aoustin, Y.; Martynenko, Y. Control Algorithms of the Longitude Motion of the Powered Paraglider. In Proceedings of the Proceedings the ASME 2012 11th Biennial Conference on Engineering Systems Design and Analysis, Nantes, France, 2–4 July 2012; pp. 1–6. [Google Scholar]
- Zaitsev, P.V.; Formalskii, A.M. Autonomous Longitudinal Motion of a Paraglider. Mathematical simulation, synthesis of control. J. Comput. Syst. Sci. Int. 2008, 47, 786–794. [Google Scholar] [CrossRef]
- Qu, S.T. Unmanned Powered Paraglider Flight Path Control Based on PID Neutral Network. Mater. Sci. Eng. 2019, 470, 012008. [Google Scholar] [CrossRef]
- Umenberger, J.; Goktogan, A.H. Guidance, Navigation and Control of a Small-Scale Paramotor. In Proceedings of the Australasian Conference on Robotics and Automation, ACRA, Wellington, New Zealand, 3–5 December 2012. [Google Scholar]
- Rademacher, B.J.; Lu, P.; Strahan, A.L.; Cerimele, C.J. In-Flight Trajectory Planning and Guidance for Autonomous Parafoils. J. Guid. Control. Dyn. 2009, 32, 1697–1712. [Google Scholar] [CrossRef] [Green Version]
- Kumar, P.; Sonkar, S.; Ghosh, A.K.; Philip, D. Dynamic Waypoint Navigation and Control of Light Weight Powered Paraglider. In Proceedings of the 2020 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2020; pp. 1–8. [Google Scholar]
- Habib, W.; Elsabbagh, R.; El-Badawy, A. Optimal Dubins Path Generation, System Identification and Control of a Paramotor. In Proceedings of the 2019 IEEE International Conference on Vehicular Electronics and Safety (ICVES), Cairo, Egypt, 4–6 September 2019; pp. 1–6. [Google Scholar]
- García-Beltrán, C.; Miranda-Araujo, E.; Guerrero-Sanchez, M.; Valencia-Palomo, G.; Hernández-González, O.; Gómez-Peñate, S. Passivity-Based Control Laws for an Unmanned Powered Parachute Aircraft. Asian J. Control 2021, 23, 287–296. [Google Scholar] [CrossRef]
- Zhang, M.; Hu, W.; Ji, S.; Song, Q.; Gong, P.; Kong, L. Vision-Assisted Landing Method for Unmanned Powered Parachute Vehicle Based on Lightweight Neural Network. IEEE Access 2021, 9, 130981–130989. [Google Scholar] [CrossRef]
- Driankov, D.; Hellendoorn, H.; Reinfrank, M. An Introduction to Fuzzy Control; Springer: Berlin, Germany; London, UK, 2011. [Google Scholar]
- Goldberg, D.E. Genetic Algorithms in Search, Optimization, and Machine Learning; Addison-Wesley: Boston, MA, USA, 2012. [Google Scholar]
- Zipfel, P.H.; Werner, S. Modeling and Simulation of Aerospace Vehicle Dynamics; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2014. [Google Scholar]
- Elkaim, G.H.; Lie, F.A.P.; Gebre-Egziabher, D. Principles of Guidance, Navigation, and Control of UAVs. In Handbook of Unmanned Aerial Vehicles; Valavanis, K.P., Vachtsevanos, G.J., Eds.; Springer: Dordrecht, The Netherlands, 2015; pp. 347–380. [Google Scholar]
- Omar, H.M. Developing Integrated Fuzzy Guidance Law for Aerodynamic Homing Missiles By Genetic Algorithm. In Proceedings of the IEEE Congress on Evolutionary Computation, Daejeon, Korea, 15–18 December 2009; pp. 1019–1024. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| NB | NM | NS | ZO | PS | PM | PB | ||
| NB | NB | NB | NB | NB | NS | NM | ZO | |
| NM | NB | NB | NB | NS | NM | ZO | PS | |
| NS | NB | NB | NS | NM | ZO | PS | PM | |
| ZO | NB | NS | NM | ZO | PS | PM | PB | |
| PS | NS | NM | ZO | PS | PM | PB | PB | |
| PM | NM | ZO | PS | PM | PB | PB | PB | |
| PB | ZO | PS | PM | PB | PB | PB | PB | |
| Parameter | Value | Unit |
|---|---|---|
| 1.55 | kg | |
| kg m2 | ||
| m | ||
| m | ||
| m | ||
| 9.81 | m/s2 | |
| AF | 0.5 | m2 |
| AP | 1.16 | m2 |
| b | 2.15 | m |
| c | 0.54 | m |
| Coefficient | Value | Coefficient | Value |
|---|---|---|---|
| 0.15 | −0.05 | ||
| 1.0 | −2.0 | ||
| 0.4 | 0.018 | ||
| 2.0 | −0.2 | ||
| 0.15 | −0.0035 | ||
| 1.0 | 0.0053 | ||
| −0.1 | 0.01 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Omar, H.M. Optimal Geno-Fuzzy Lateral Control of Powered Parachute Flying Vehicles. Aerospace 2021, 8, 400. https://doi.org/10.3390/aerospace8120400
Omar HM. Optimal Geno-Fuzzy Lateral Control of Powered Parachute Flying Vehicles. Aerospace. 2021; 8(12):400. https://doi.org/10.3390/aerospace8120400
Chicago/Turabian StyleOmar, Hanafy M. 2021. "Optimal Geno-Fuzzy Lateral Control of Powered Parachute Flying Vehicles" Aerospace 8, no. 12: 400. https://doi.org/10.3390/aerospace8120400
APA StyleOmar, H. M. (2021). Optimal Geno-Fuzzy Lateral Control of Powered Parachute Flying Vehicles. Aerospace, 8(12), 400. https://doi.org/10.3390/aerospace8120400