Multifidelity Sensitivity Study of Subsonic Wing Flutter for Hybrid Approaches in Aircraft Multidisciplinary Design and Optimisation


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Problem Formulation
2.1. Uncoupled Natural Vibration Modes
2.2. Unsteady Aerodynamic Model
2.3. Modal Approach and Stability Analysis
2.4. Sensitivity Analysis
3. Lower-Fidelity Model
Aero-Structural Parametric Derivatives
4. Higher-Fidelity Model
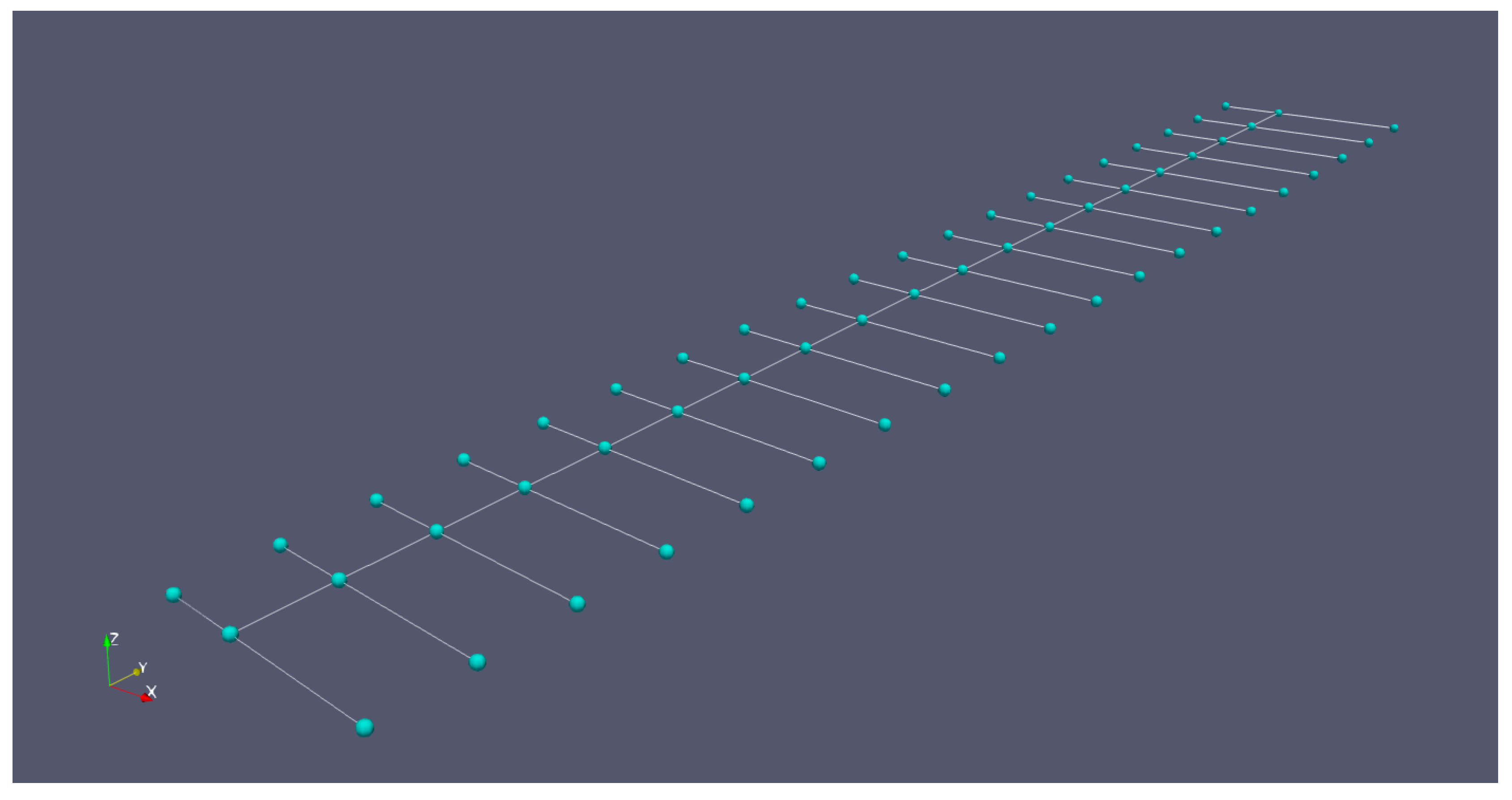
4.1. Structural Model
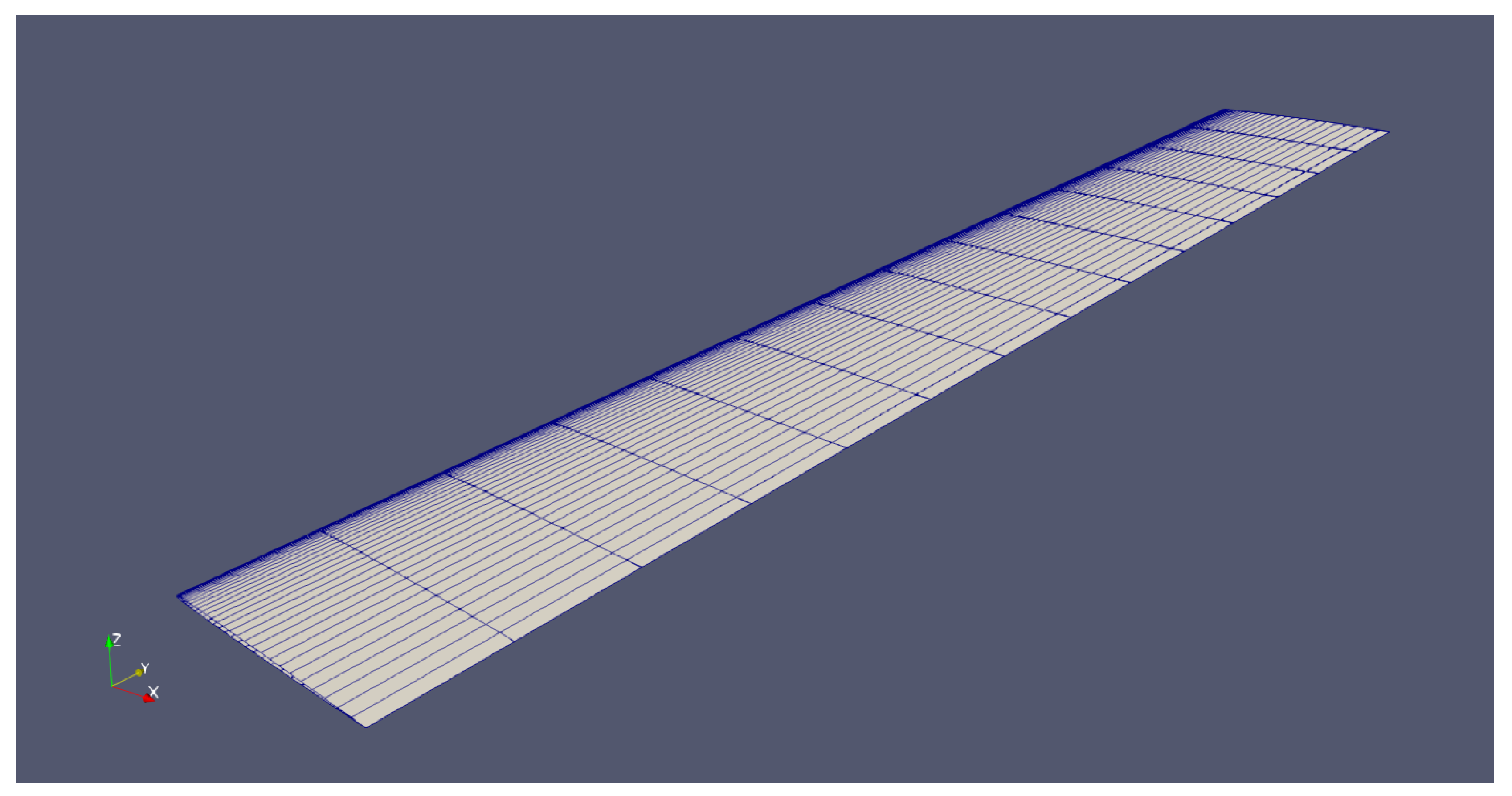
4.2. Aerodynamic Model
4.3. Aeroelastic Model
4.4. Aero-Structural Parametric Derivatives
5. Results and Discussion
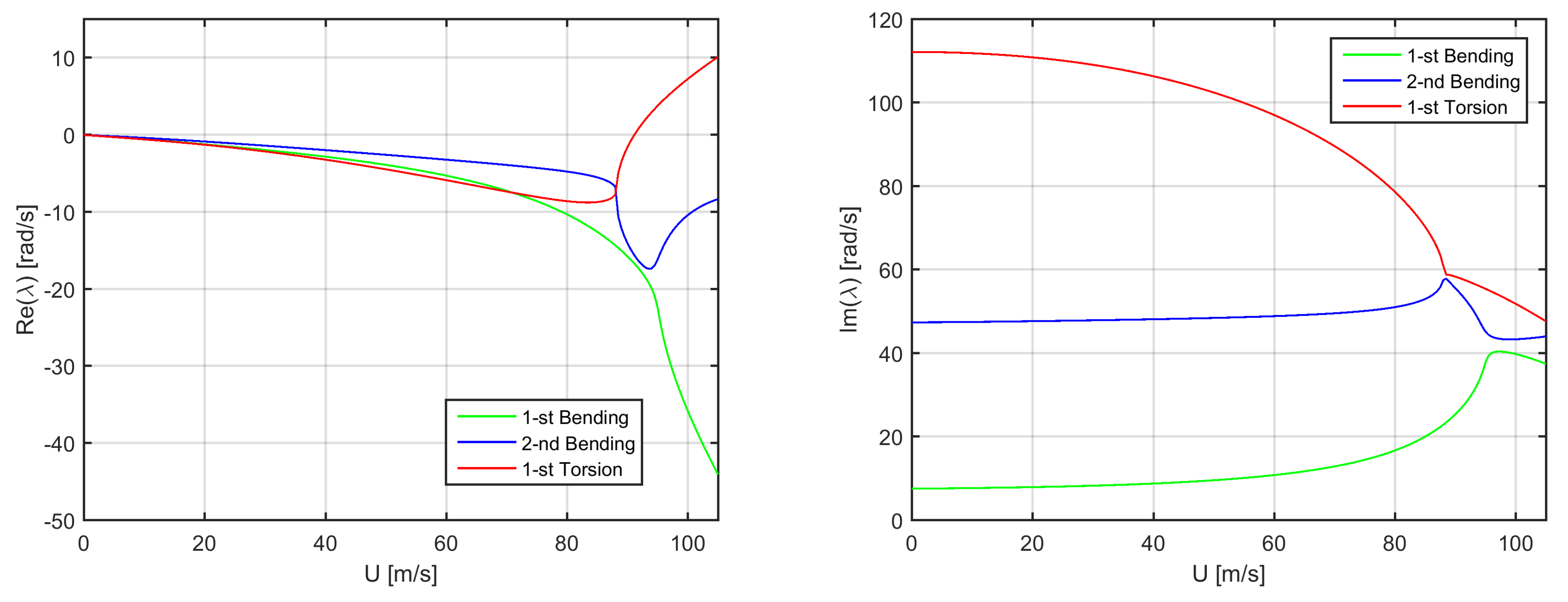
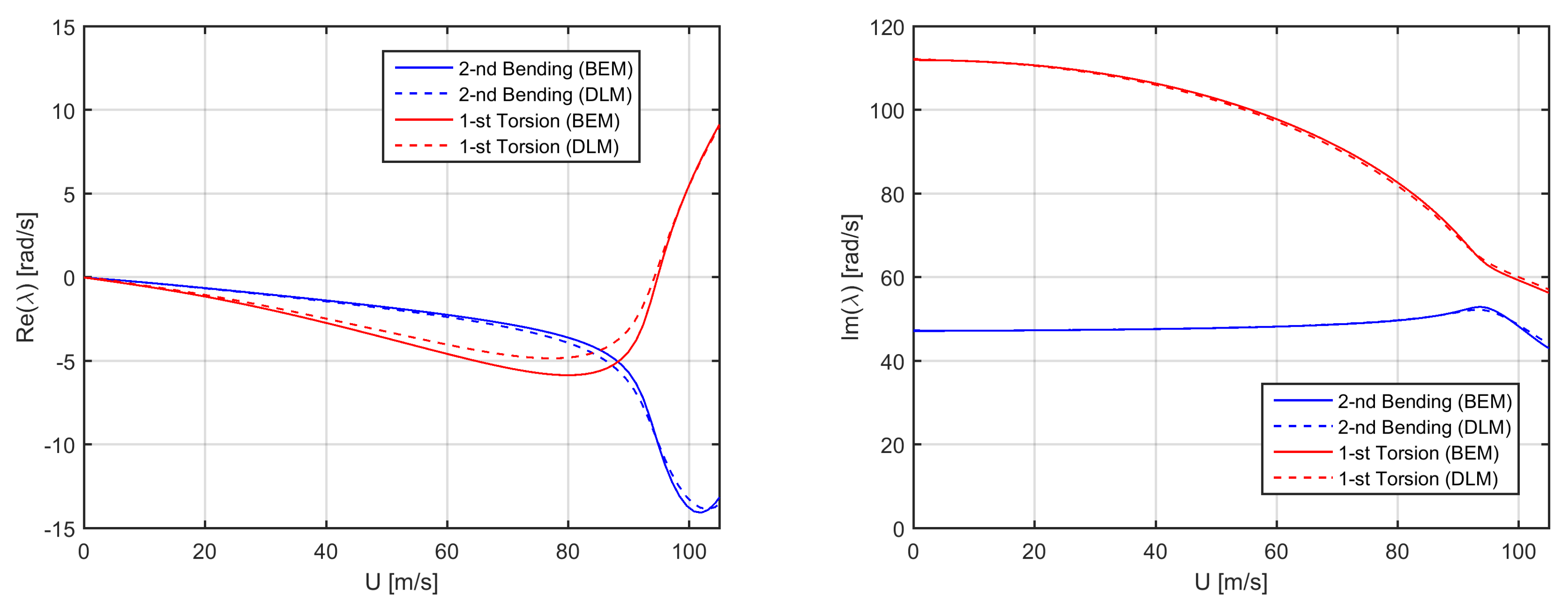
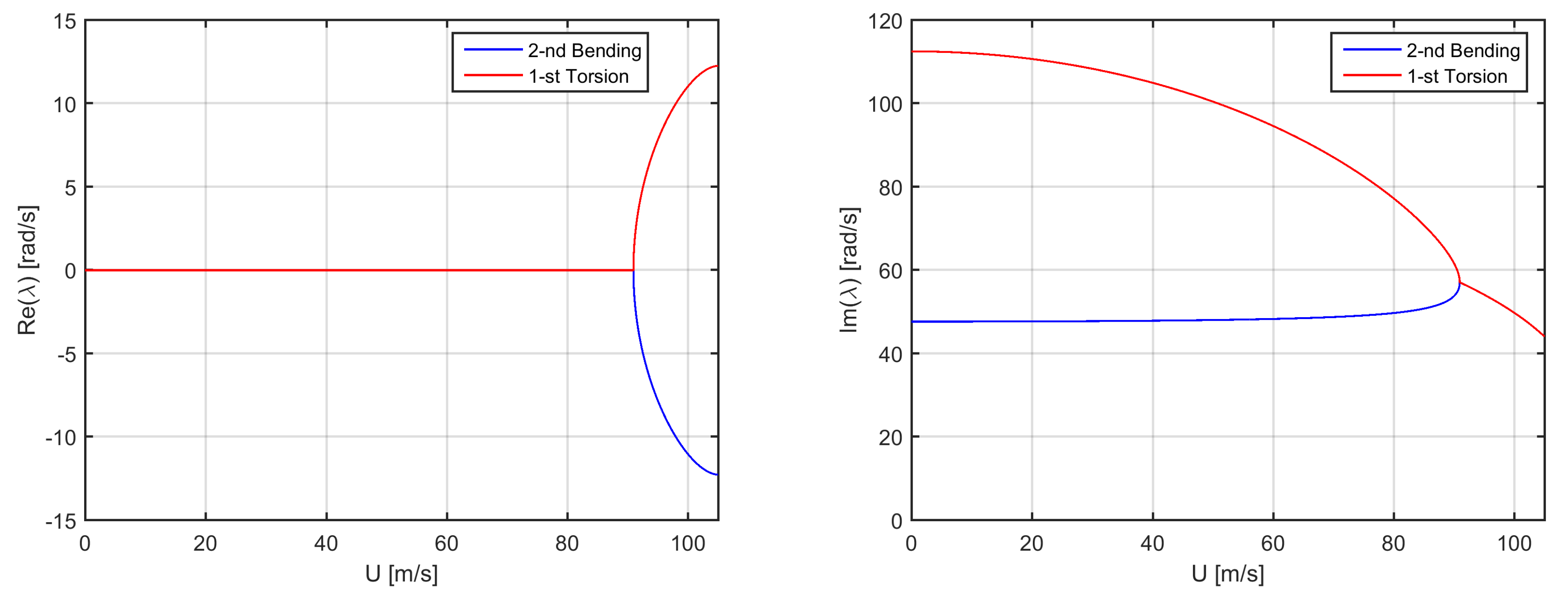
5.1. Aeroelastic Analyses
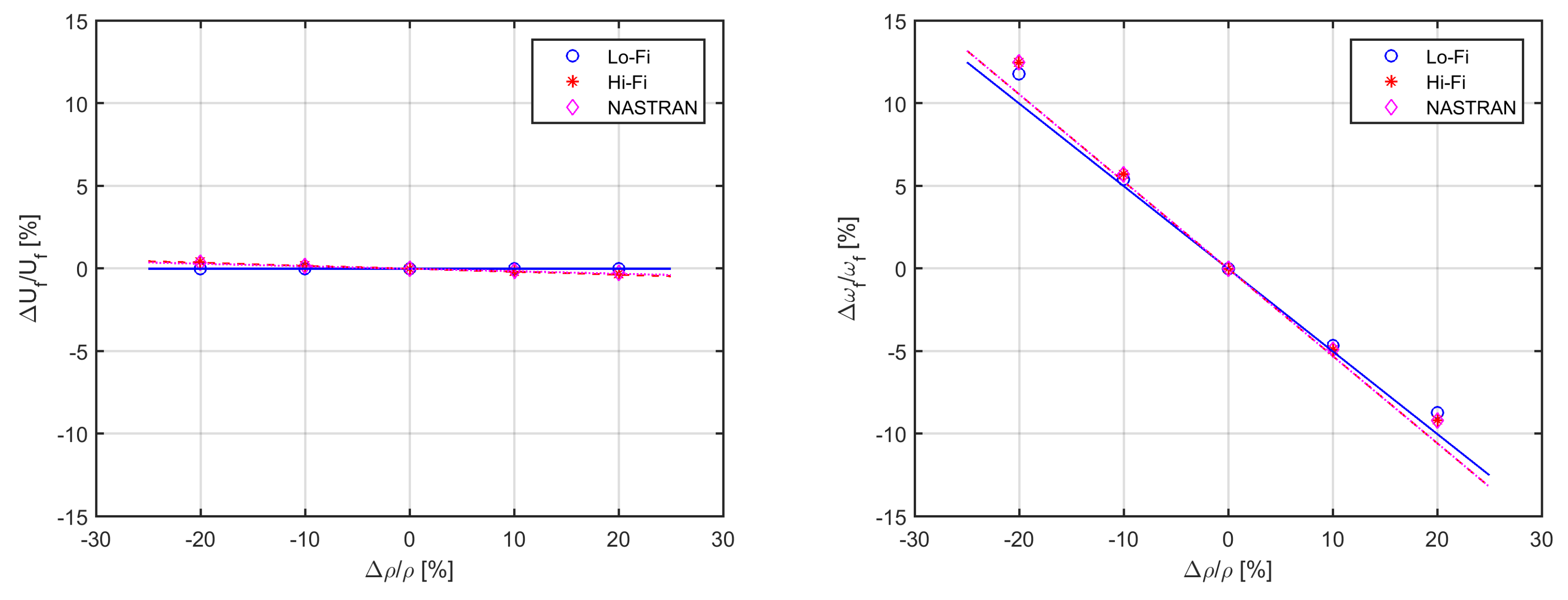
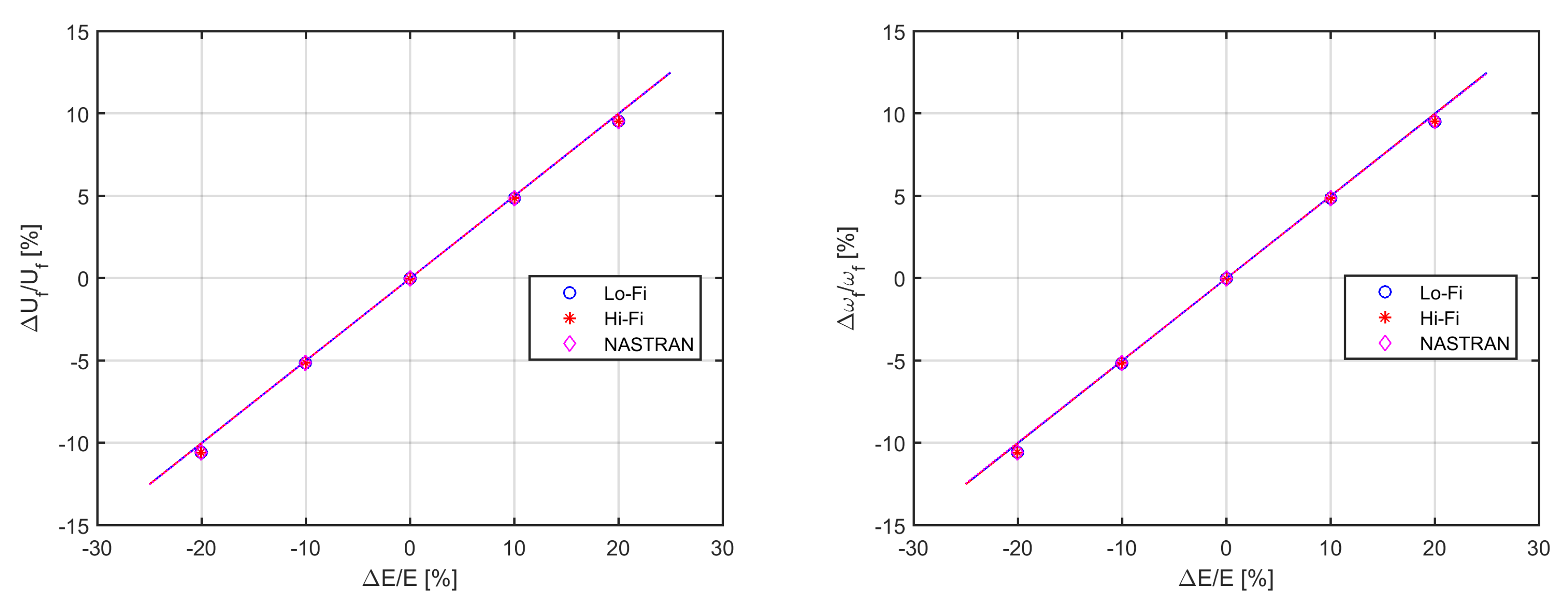
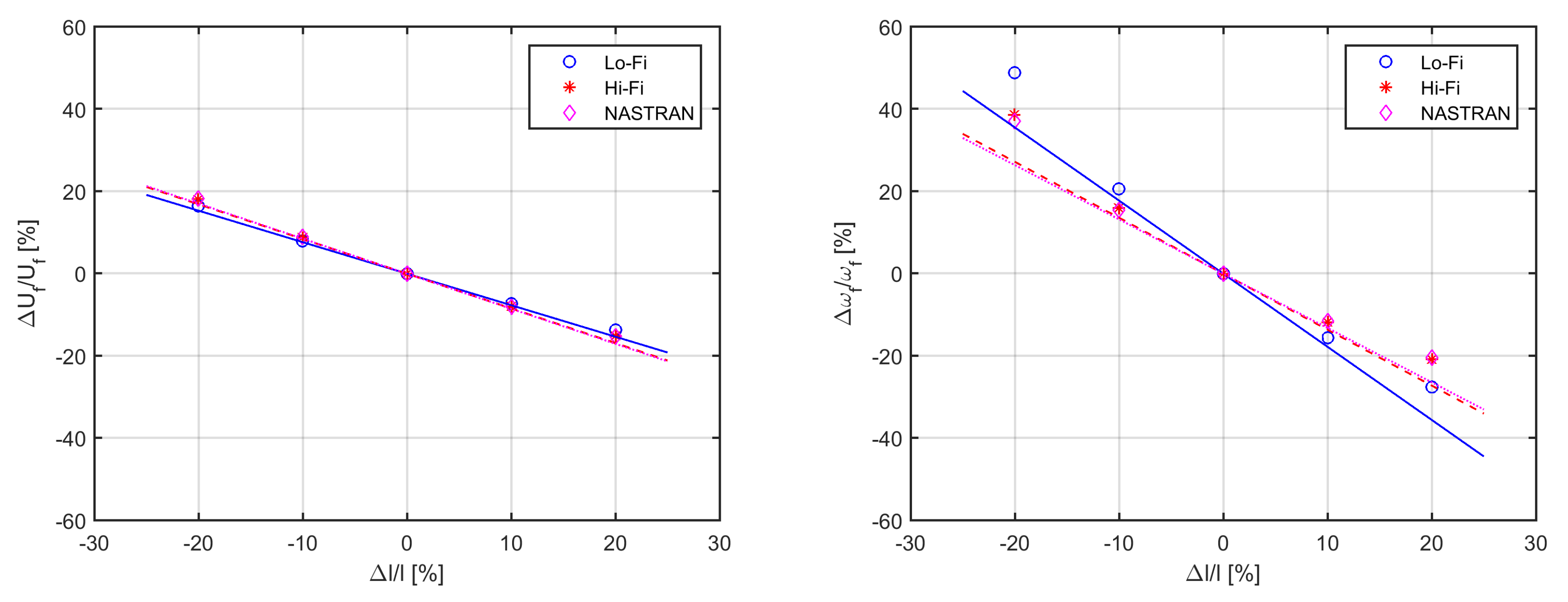
5.2. Sensitivity Study
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| Symbols | |
| A | aerodynamic panel area |
| c | section chord |
| section lift | |
| section lift derivative | |
| wing lift derivative | |
| pressure coefficient | |
| Theodorsen’s function | |
| generalised damping matrix | |
| aerodynamic approximation matrix (fraction denominator) | |
| e | semiperimeter-to-span ratio |
| E | section Young’s elastic modulus |
| f | cross-projection of first bending and first torsion modes |
| generalised load vector | |
| g | cross-projection of second bending and first torsion modes |
| G | section shear elastic modulus |
| h | section flexural (plunge) displacement |
| Hankel’s functions of the second type and n-th order | |
| I | section flexural area moments of inertia |
| J | section torsional area moments of inertia |
| k | reduced frequency |
| k | equivalent spring stiffness |
| generalised stiffness matrix | |
| l | wing semi-span |
| section aerodynamic force | |
| m | section mass |
| section aerodynamic moment | |
| generalised mass matrix | |
| aerodynamic panel normal vector | |
| aerodynamic approximation matrix (fraction numerator) | |
| p | design parameter |
| generalised aerodynamic forces matrix | |
| r | squared ratio of second and first flexural vibration frequencies |
| s | complex reduced frequency |
| system matrix | |
| t | time |
| aerodynamic influence coefficients matrix | |
| eigenvector | |
| U | horizontal airspeed |
| V | vertical airspeed |
| x | chordwise coordinate |
| y | spanwise coordinate |
| w | section vertical displacement |
| Greek | |
| angle of attack | |
| generalised coordinates | |
| aerofoil thickness ratio | |
| natural vibration mode shape | |
| flexural natural vibration constant | |
| wing aspect ratio | |
| aerodynamic load scaling function | |
| eigenvalue | |
| section mass moment of inertia | |
| torsional natural vibration constant | |
| section torsional (pitch) displacement | |
| normal wash matrix | |
| air density | |
| material density | |
| aerodynamic potential matrix | |
| reduced time | |
| natural vibration frequency | |
| Subscripts | |
| A | aerodynamic |
| c | critical |
| f | flutter |
| d | divergence |
| h | flexural |
| S | structural |
| torsional | |
| Acronyms | |
| AC | aerodynamic centre |
| AIC | aerodynamic influence coefficient |
| BEM | boundary element method |
| CFD | computational fluid dynamics |
| CG | centre of gravity |
| CP | control point |
| CSRD | closely-spaced rigid diaphragm |
| DLM | doublet lattice method |
| EA | elastic axis |
| FEM | finite element method |
| FSI | fluid-structure interaction |
| GAF | generalised aerodynamic forces |
| IPS | infinite plate spline |
| MAC | modal assurance criterion |
| MC | mid-chord |
| MDO | multidisciplinary design and optimisation |
| MFA | matrix fraction approach |
| MST | modified strip theory |
| ODE | ordinary differential equation |
| PDE | partial differential equation |
| QST | quasi-steady theory |
| RFA | rational function approximation |
| ROM | reduced order model |
| SST | standard strip theory |
| TST | tuned strip theory |
Appendix A. Aeroelastic Stability of the Typical Section with Steady Aerodynamics
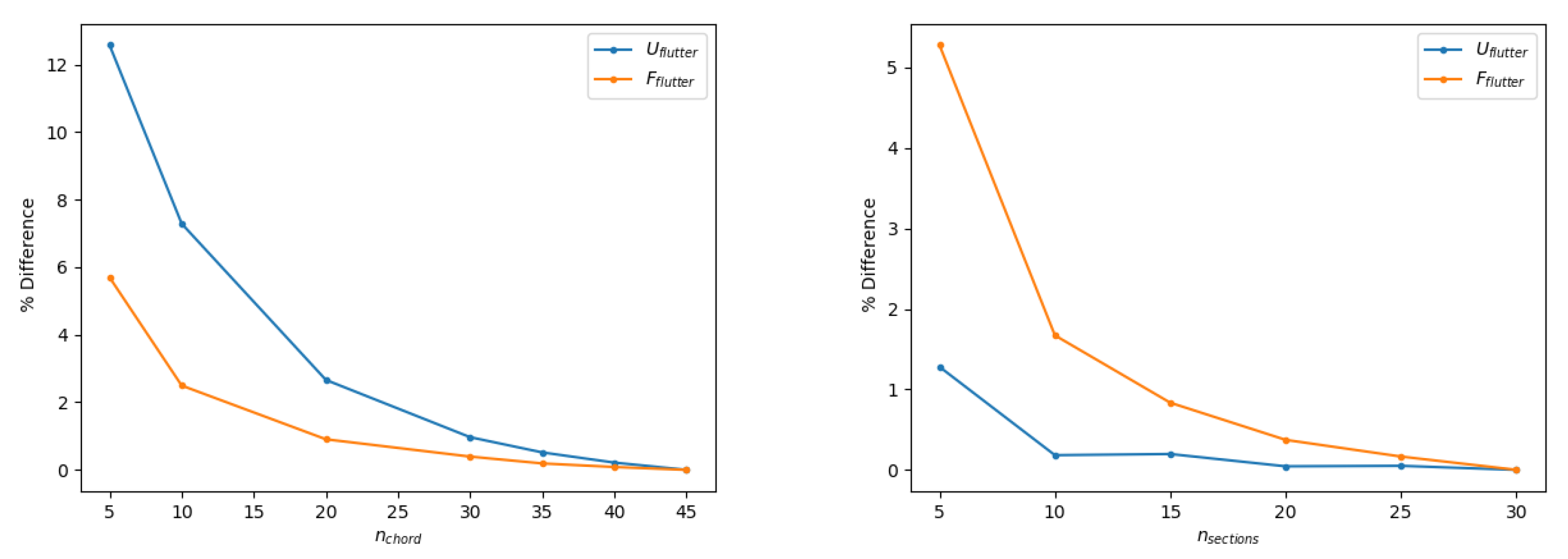
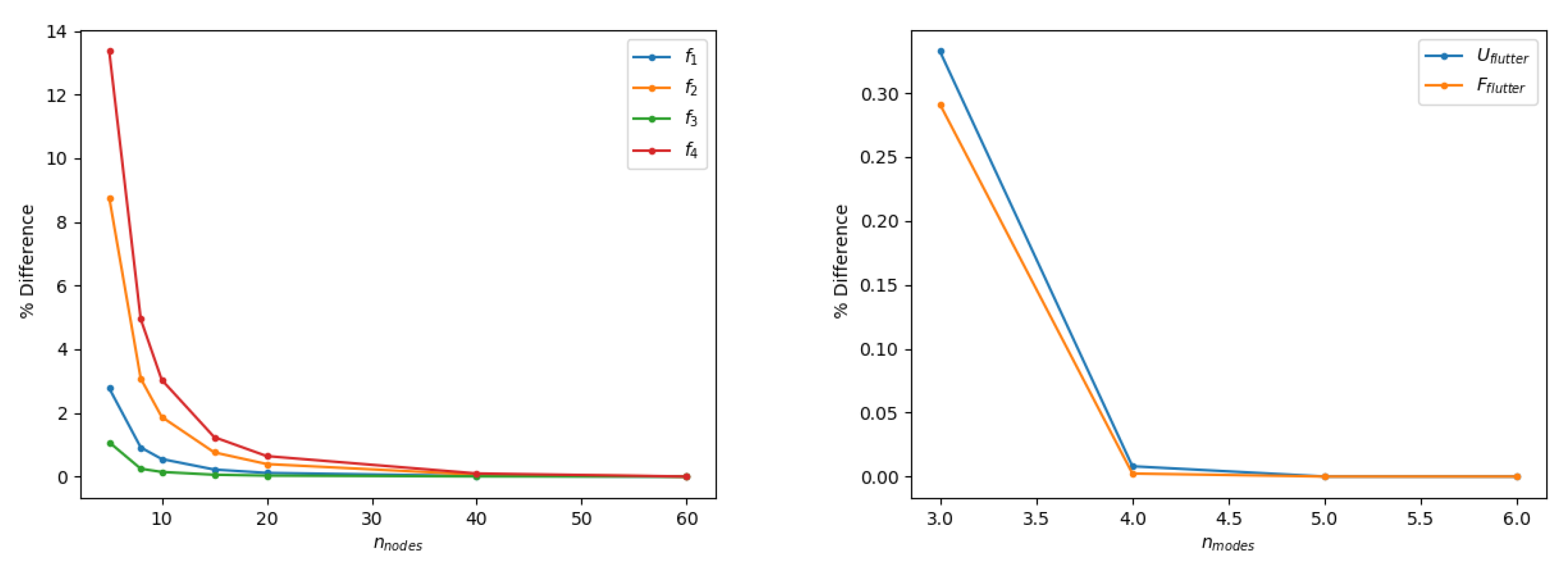
Appendix B. Higher-Fidelity Model Results Convergence Study



References
- Alexandrov, N.; Hussaini, M. Multidisciplinary Design Optimization: State of the Art; SIAM: Philadelphia, PA, USA, 1997. [Google Scholar]
- Martins, J.; Lambe, A. Multidisciplinary Design Optimization: A Survey of Architectures. AIAA J. 2013, 51, 2049–2075. [Google Scholar] [CrossRef]
- Quarteroni, A.; Rozza, G. Reduced Order Methods for Modeling and Computational Reduction; Springer International Publishing: Cham, Switzerland, 2014. [Google Scholar]
- Qu, Z. Model Order Reduction Techniques with Applications in Finite Element Analysis; Springer: London, UK, 2004. [Google Scholar]
- Ghoreyshi, M.; Jirasek, A.; Cummings, R. Reduced Order Unsteady Aerodynamic Modeling for Stability and Control Analysis Using Computational Fluid Dynamics. Prog. Aerosp. Sci. 2014, 71, 167–217. [Google Scholar] [CrossRef]
- Livne, E. Integrated Aeroservoelastic Optimization: Status and Direction. J. Aircr. 1999, 36, 122–145. [Google Scholar] [CrossRef]
- Cavagna, L.; Ricci, S.; Travaglini, L. NeoCASS: An Integrated Tool for Structural Sizing, Aeroelastic Analysis and MDO at Conceptual Design Level. Prog. Aerosp. Sci. 2011, 47, 621–635. [Google Scholar] [CrossRef]
- Silva, W. AEROM: NASA’s Unsteady Aerodynamic and Aeroelastic Reduced-Order Modeling Software. Aerospace 2018, 5, 41. [Google Scholar] [CrossRef]
- Cardani, C.; Mantegazza, P. Calculation of Eigenvalue and Eigenvector Derivatives for Algebraic Flutter and Divergence Eigenproblems. AIAA J. 1979, 17, 408–412. [Google Scholar] [CrossRef]
- Crema, L.B.; Mastroddi, F.; Coppotelli, G. Aeroelastic Sensitivity Analyses for Flutter Speed and Gust Response. J. Aircr. 2000, 37, 172–180. [Google Scholar] [CrossRef]
- Martins, J.; Hwang, J. Review and Unification of Methods for Computing Derivatives of Multidisciplinary Computational Models. AIAA J. 2013, 51, 2582–2599. [Google Scholar] [CrossRef]
- Hodges, D.; Pierce, G. Introduction to Structural Dynamics and Aeroelasticity; Cambridge University Press: Cambridge, UK, 2002. [Google Scholar]
- Berci, M. Semi-Analytical Static Aeroelastic Analysis and Response of Flexible Subsonic Wings. Appl. Math. Comput. 2015, 267, 148–169. [Google Scholar] [CrossRef]
- Ripepi, M.; Görtz, S. Reduced Order Models for Aerodynamic Applications, Loads and MDO. In Proceedings of the Deutscher Luft- und Raumfahrtkongress, Braunschweig, Germany, 13–15 September 2016. [Google Scholar]
- Bungartz, H.; Schafer, M. Fluid-Structure Interaction: Modelling, Simulation, Optimization; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Dhatt, G.; Touzot, G.; Lefrancois, E. Finite Element Method; Wiley: Hoboken, NJ, USA, 2013. [Google Scholar]
- Chung, T. Computational Fluid Dynamics; Cambridge University Press: Cambridge, UK, 2002. [Google Scholar]
- Farhat, C.; Lesoinne, M.; LeTallec, P. Load and Motion Transfer Algorithms for Fluid/Structure Interaction Problems with Non-Matching Discrete Interfaces: Momentum and Energy Conservation, Optimal Discretization and Application to Aeroelasticity. Comput. Methods Appl. Mech. Eng. 1998, 157, 95–114. [Google Scholar] [CrossRef]
- Cizmas, P.; Gargoloff, J. Mesh Generation and Deformation Algorithm for Aeroelasticity Simulations. J. Aircr. 2008, 45, 1062–1066. [Google Scholar] [CrossRef]
- Berci, M.; Toropov, V.V.; Hewson, R.W.; Gaskell, P.H. Multidisciplinary Multifidelity Optimisation of a Flexible Wing Aerofoil with Reference to a Small UAV. Struct. Multidiscip. Optim. 2014, 50, 683–699. [Google Scholar] [CrossRef]
- Berci, M.; Cavallaro, R. A Hybrid Reduced-Order Model for the Aeroelastic Analysis of Flexible Subsonic Wings—A Parametric Assessment. Aerospace 2018, 5, 76. [Google Scholar] [CrossRef]
- Bisplinghoff, R.; Ashley, H.; Halfman, R. Aeroelasticity; Dover: Mineola, NY, USA, 1996. [Google Scholar]
- Hancock, G.; Wright, J.; Simpson, A. On the Teaching of the Principles of Wing Flexure-Torsion Flutter. Aeronaut. J. 1985, 89, 285–305. [Google Scholar]
- Dennis, S. Undergraduate Aeroelasticity: The Typical Section Idealization Re-Examined. Int. J. Mech. Eng. Educ. 2013, 41, 72–91. [Google Scholar] [CrossRef]
- Loring, S. Use of Generalized Coordinates in Flutter Analysis. SAE Trans. 1944, 52, 113–132. [Google Scholar]
- Abbott, I.; von Doenhoff, A. Theory of Wing Sections: Including a Summary of Aerofoil Data; Dover: New York, NY, USA, 1945. [Google Scholar]
- Banerjee, J. Flutter Sensitivity Studies of High Aspect Ratio Aircraft Wings. WIT Trans. Built Environ. 1993, 2, 683–699. [Google Scholar]
- Issac, J.; Kapania, R.; Barthelemy, J. Sensitivity Analysis of Flutter Response of a Wing Incorporating Finite-Span Corrections; NASA-CR-202089; NASA: Washington, DC, USA, 1994. [Google Scholar]
- Livne, E. Future of Airplane Aeroelasticity. J. Aircr. 2003, 40, 1066–1092. [Google Scholar] [CrossRef]
- Wright, J.; Cooper, J. Introduction to Aircraft Aeroelasticity and Loads; Wiley: Chichester, UK, 2014. [Google Scholar]
- Yang, B. Strain, Stress and Structural Dynamics; Elsevier: London, UK, 2005. [Google Scholar]
- Guo, S. Aeroelastic Optimisation of an Aerobatic Aircraft Wing Structure. Aerosp. Sci. Technol. 2003, 11, 396–404. [Google Scholar] [CrossRef]
- Karamcheti, K. Principles of Ideal-Fluid Aerodynamics; Wiley: New York, NY, USA, 1967. [Google Scholar]
- Diederich, F. A Plan-Form Parameter for Correlating Certain Aerodynamic Characteristics of Swept Wings; NACA-TN-2335; NACA: Washington, DC, USA, 1951. [Google Scholar]
- Theodorsen, T. General Theory of Aerodynamic Instability and the Mechanism of Flutter; NACA-TR-496; NACA: Washington, DC, USA, 1935. [Google Scholar]
- Jones, R. Correction of the Lifting-Line Theory for the Effect of the Chord. In NACA-TN-817; NACA: Washington, DC, USA, 1941. [Google Scholar]
- Katz, J.; Plotkin, A. Low Speed Aerodynamics; Cambridge University Press: Cambridge, UK, 2001. [Google Scholar]
- Stanford, B.K. Role of Unsteady Aerodynamics During Aeroelastic Optimization. AIAA J. 2015, 53, 3826–3831. [Google Scholar] [CrossRef]
- van Zyl, L. Aeroelastic Divergence and Aerodynamic Lag Roots. J. Aircr. 2001, 38, 586–588. [Google Scholar] [CrossRef]
- Leishman, J. Principles of Helicopter Aerodynamics; Cambridge University Press: Cambridge, UK, 2006. [Google Scholar]
- Fung, Y. An Introduction to the Theory of Aeroelasticity; Dover: Mineola, NY, USA, 1993. [Google Scholar]
- van Zyl, L. Use of Eigenvectors in the Solution of the Flutter Equation. J. Aircr. 1993, 30, 553–554. [Google Scholar] [CrossRef]
- Dimitriadis, G. Introduction to Nonlinear Aeroelasticity; Wiley: Chichester, UK, 2017. [Google Scholar]
- Vanderplaats, G. Numerical Optimization Techniques for Engineering Design: With Applications; McGraw Hill: New York, NY, USA, 1984. [Google Scholar]
- Kennedy, G.; Martins, J. A Parallel Finite-Element Framework for Large-Scale Gradient-Based Design Optimization of High-Performance Structures. Finite Elem. Anal. Des. 2014, 87, 56–73. [Google Scholar] [CrossRef]
- Stanford, B.; Dunning, P. Optimal Topology of Aircraft Rib and Spar Structures Under Aeroelastic Loads. J. Aircr. 2015, 52, 1298–1311. [Google Scholar] [CrossRef]
- Kennedy, G.; Martins, J. A Parallel Aerostructural Optimization Framework for Aircraft Design Studies. Struct. Multidiscip. Optim. 2014, 50, 1079–1101. [Google Scholar] [CrossRef]
- Seyranian, A. Sensitivity Analysis and Optimization of Aeroelastic Stability. Int. J. Solids Struct. 1982, 18, 791–807. [Google Scholar] [CrossRef]
- Pedersen, P.; Seyranian, A. Sensitivity Analysis for Problems of Dynamic Stability. Int. J. Solids Struct. 1983, 19, 315–335. [Google Scholar] [CrossRef]
- Cardani, C.; Mantegazza, P. Continuation and Direct Solution of the Flutter Equation. Comput. Struct. 1978, 8, 185–192. [Google Scholar]
- Bindolino, G.; Mantegazza, P. Aeroelastic Derivatives as a Sensitivity Analysis of Nonlinear Equations. AIAA J. 1987, 25, 1145–1146. [Google Scholar] [CrossRef]
- Bisplinghoff, R.; Ashley, H. Principles of Aeroelasticity; Dover: Mineola, NY, USA, 2013. [Google Scholar]
- Rodden, W.; Johnson, E. MSC/NASTRAN Aeroelastic Analysis User’s Guide; MSC Software Corporation: Newport Beach, CA, USA, 1994. [Google Scholar]
- Rodden, W.; Harder, R.; Bellinger, E. Aeroelastic Addition to NASTRAN; NASA-CR-3094; NASA: Washington, DC, USA, 1979. [Google Scholar]
- Morino, L. A General Theory of Unsteady Compressible Potential Aerodynamics; NASA-CR-2464; NASA: Washington, DC, USA, 1974. [Google Scholar]
- Morino, L.; Chen, L.; Suciu, E. Steady and Oscillatory Subsonic and Supersonic Aerodynamics around Complex Configurations. AIAA J. 1975, 13, 368–374. [Google Scholar] [CrossRef]
- Megson, T. Aircraft Structures for Engineering Students; Elsevier: Oxford, UK, 2007. [Google Scholar]
- Lanczos, C. An Iteration Method for the Solution of the Eigenvalue Problem of Linear Differential and Integral Operators. J. Res. Natl. Bur. Stand. 1950, 45, 255–282. [Google Scholar] [CrossRef]
- Albano, E.; Rodden, W. A Doublet-Lattice Method for Calculating Lift Distributions on Oscillating Surfaces in Subsonic Flows. AIAA J. 1969, 7, 279–285. [Google Scholar] [CrossRef]
- Rodden, W.; Taylor, P.; McIntosh, S. Further Refinement of the Subsonic Doublet-Lattice Method. J. Aircr. 1998, 35, 720–727. [Google Scholar] [CrossRef]
- Whitham, G. Linear and Nonlinear Waves; Wiley: New York, NY, USA, 1999. [Google Scholar]
- Bindolino, G.; Mantegazza, P. Improvements on a Green’s Function Method for the Solution of Linearized Unsteady Potential Flows. J. Aircr. 1987, 24, 355–361. [Google Scholar] [CrossRef]
- Chen, P. ZAERO User’s Manual; ZONA Technology Incorporated: Scottsdale, AZ, USA, 2018. [Google Scholar]
- Torrigiani, F.; Ciampa, P.D. Development of an Unsteady Aeroelastic Module for a Collaborative Aircraft MDO. In Proceedings of the Multidisciplinary Analysis and Optimization Conference, Atlanta, GA, USA, 25–29 June 2018. [Google Scholar]
- Miranda, I.; Soviero, P. Indicial Response of Thin Wings in a Compressible Subsonic Flow. In Proceedings of the 18th International Congress of Mechanical Engineering, Ouro Preto, Brazil, 6–11 November 2005. [Google Scholar]
- Maskew, B. Program VSAERO Theory Document; NASA-CR-4023; NASA: Washington, DC, USA, 1987. [Google Scholar]
- Murua, J.; Martínez, P.; Climent, H.; van Zylc, L.; Palaciosd, R. T-Tail Flutter: Potential-Flow Modelling, Experimental Validation and Flight Tests. Prog. Aerosp. Sci. 2014, 71, 54–84. [Google Scholar] [CrossRef]
- Rodden, W. Theoretical and Computational Aeroelasticity; Crest Publishing: Los Angeles, CA, USA, 2011. [Google Scholar]
- Walther, J.; Gastaldi, A.A.; Maierl, R. Integration Aspects of the Collaborative Aero-Structural Design of an Unmanned Aerial Vehicle. CEAS Aeronaut. J. 2020, 11, 217–227. [Google Scholar] [CrossRef]
- Jones, K.; Platzer, M. Airfoil Geometry and Flow Compressibility Effects on Wings and Blade Flutter. Aerosp. Res. Cent. 1998. [Google Scholar] [CrossRef]
- Morino, L.; Troia, R.D.; Ghiringhelli, G.L.; Mantegazza, P. Matrix Fraction Approach for Finite-State Aerodynamic Modeling. AIAA J. 1995, 33, 703–711. [Google Scholar] [CrossRef]
- Roger, K. Airplane Math Modelling Methods for Active Control Design. AGARD 1977, 28, 1–11. [Google Scholar]
- Torrigiani, F.; Walther, J.-N.; Bombardieri, R.; Cavallaro, R.; Ciampa, P.D. Flutter Sensitivity Analysis for Wing Planform Optimization. In Proceedings of the International Forum on Aeroelasticity and Structural Dynamics IFASD 2019, Savannah, GA, USA, 9–13 June 2019. [Google Scholar]
- Venkatesan, C.; Friedmann, P. New Approach to Finite-State Modeling of Unsteady Aerodynamics. AIAA J. 1986, 24, 1889–1897. [Google Scholar] [CrossRef]
- Allemang, R. The Modal Assurance Criterion—Twenty Years of Use and Abuse. Sound Vib. 2003, 37, 14–23. [Google Scholar]
- Harder, R.; Desmarais, R. Interpolation Using Surface Splines. J. Aircr. 1972, 9, 189–191. [Google Scholar] [CrossRef]
- Hassig, H. An Approximate True Damping Solution of the Flutter Equation by Determinant Iteration. J. Aircr. 1971, 8, 885–889. [Google Scholar] [CrossRef]
- Squire, W.; Trapp, G. Using Complex Variables to Estimate Derivatives of Real Functions. SIAM Rev. 1998, 40, 110–112. [Google Scholar] [CrossRef]
- Dowell, E. A Modern Course in Aeroelasticity; Springer International Publishing: Cham, Switzerland, 2015. [Google Scholar]
- Bellinger, D.; Pototzky, T. A Study of Aerodynamic Matrix Numerical Condition. In Proceedings of the 3rd MSC Worldwide Aerospace Conference and Technology Showcase, Toulouse, France, 16–24 September 2001. [Google Scholar]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Berci, M.; Torrigiani, F. Multifidelity Sensitivity Study of Subsonic Wing Flutter for Hybrid Approaches in Aircraft Multidisciplinary Design and Optimisation. Aerospace 2020, 7, 161. https://doi.org/10.3390/aerospace7110161
Berci M, Torrigiani F. Multifidelity Sensitivity Study of Subsonic Wing Flutter for Hybrid Approaches in Aircraft Multidisciplinary Design and Optimisation. Aerospace. 2020; 7(11):161. https://doi.org/10.3390/aerospace7110161
Chicago/Turabian StyleBerci, Marco, and Francesco Torrigiani. 2020. "Multifidelity Sensitivity Study of Subsonic Wing Flutter for Hybrid Approaches in Aircraft Multidisciplinary Design and Optimisation" Aerospace 7, no. 11: 161. https://doi.org/10.3390/aerospace7110161
APA StyleBerci, M., & Torrigiani, F. (2020). Multifidelity Sensitivity Study of Subsonic Wing Flutter for Hybrid Approaches in Aircraft Multidisciplinary Design and Optimisation. Aerospace, 7(11), 161. https://doi.org/10.3390/aerospace7110161