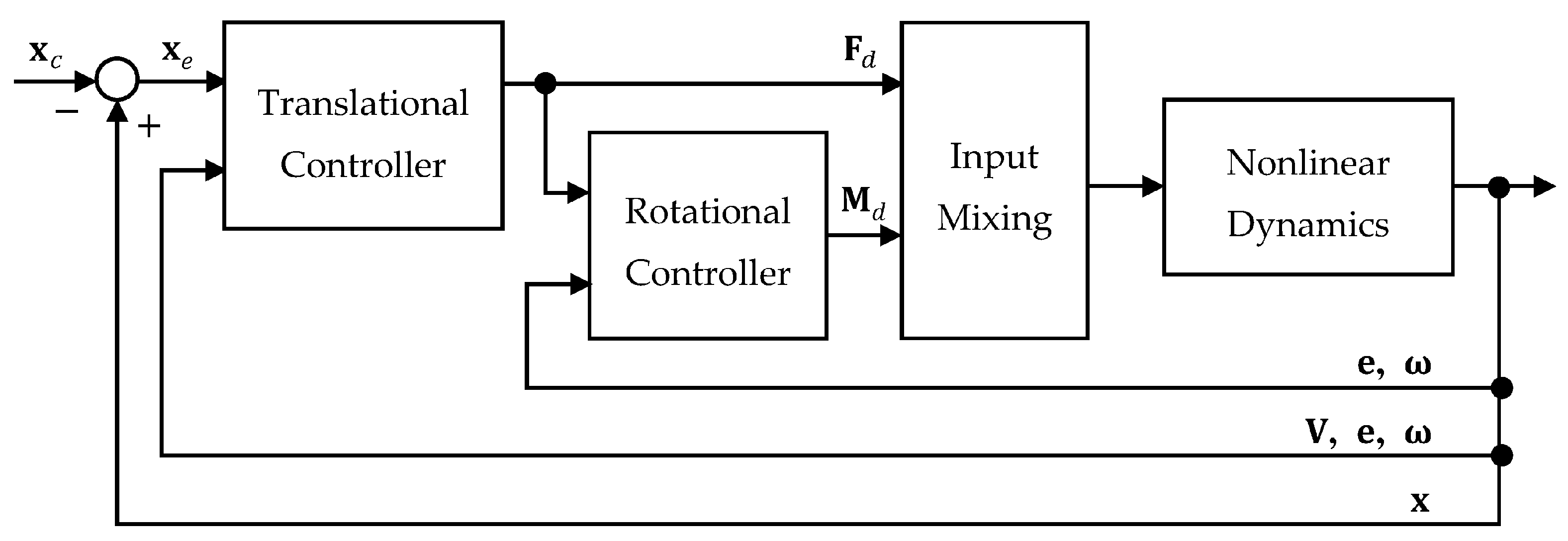
3.1. Translational Controller
The position error
is defined as
where
is the current position, and
the desired position that is command value to the translational controller.
The second derivative of the QTW-UAV is obtained by using the transform matrix , velocity vector V. Here, the subscript of the coordinate transformation matrix represents the conversion from the body coordinate system to the inertial coordinate system.
Substituting the translational motion Equation (1) into above equation, the following equation is obtained.
where
, which is represented as
, is the vector of force that can be generated by control input in the inertial coordinate system. Replacing the nonlinear term of the above equation with
gives the following equation.
The nonlinear term
is estimated by the observer based on the DAC method [
15,
16]. The term
is assumed here to be a polynomial of time
with coefficients
and
that are not necessary to calculate directly. Then, its time derivative and second order derivative can be defined as follows:
The estimated value of the position error
can be obtained as follows:
in which the observer gain is
. The observation value that is position and velocity obtained by sensors such as an accelerometer is denoted by
.
is the estimated output vector. The symbol
means an estimated value. The observable states are position
and velocity
. The following equation is derived from Equations (22) and (23).
The Linear Quadratic (LQ) method is applied to a duality system of Equation (24) to design the observer gain
. The input vector
for linearizing the error equation by using the DI method is expressed by the equation including estimated nonlinear terms
as follows:
where
is a new control input of the linearized system. Assuming that the estimated nonlinear term agrees with its true value completely, the equation of the error relating to translational motion is obtained.
Equation (27) is rewritten by the state equation.
Assume a state feedback of the form for the control input .
The feedback gain is designed by using LQ method.
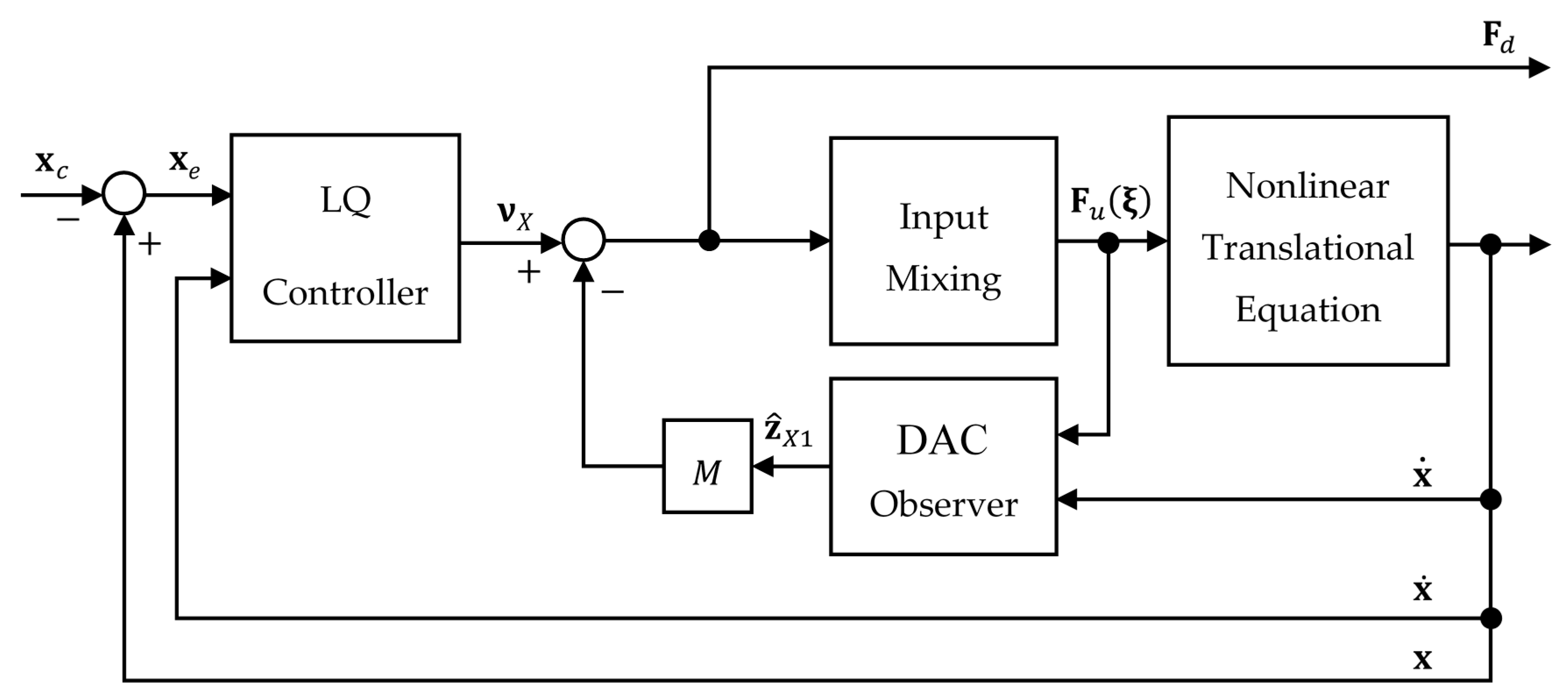
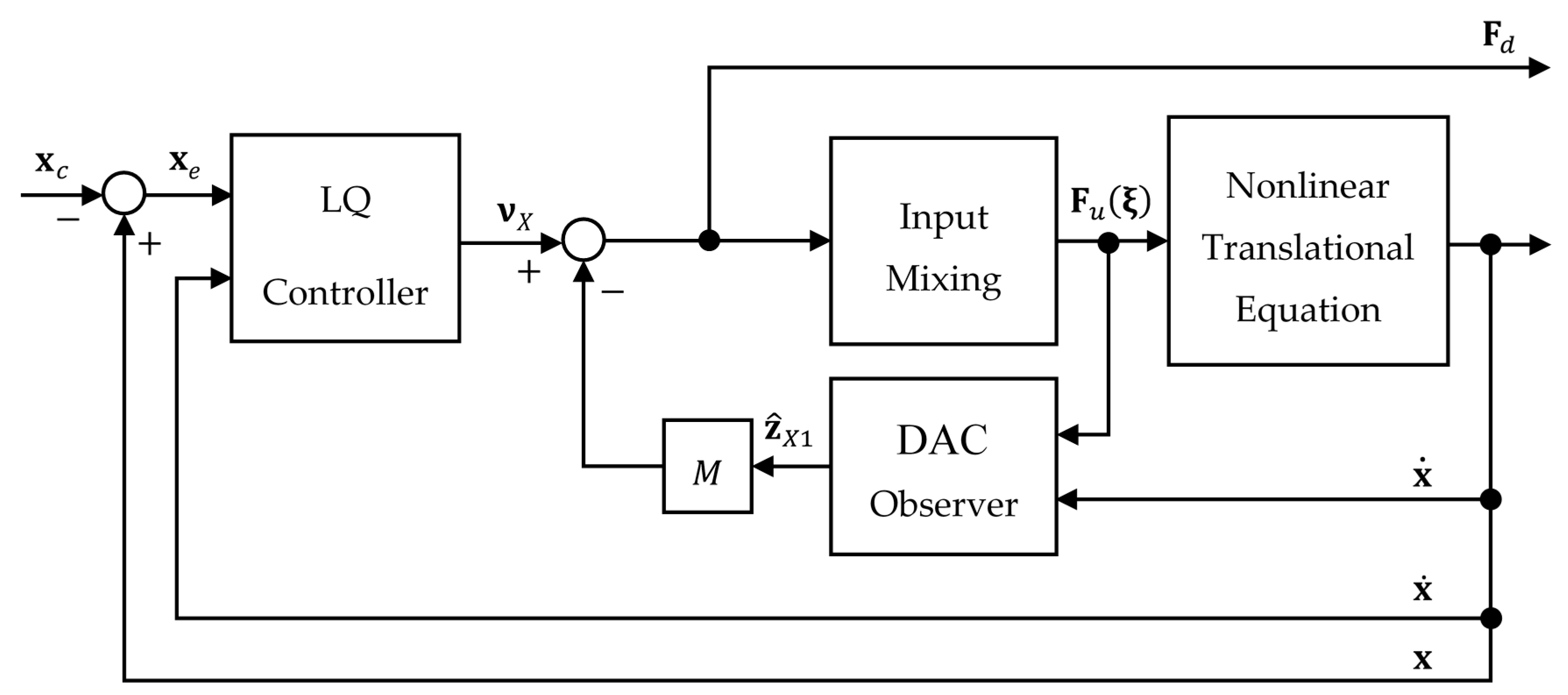
Figure 5 shows a block diagram of the proposed control system for the translational motion of the UAV.
3.2. Rotational Controller
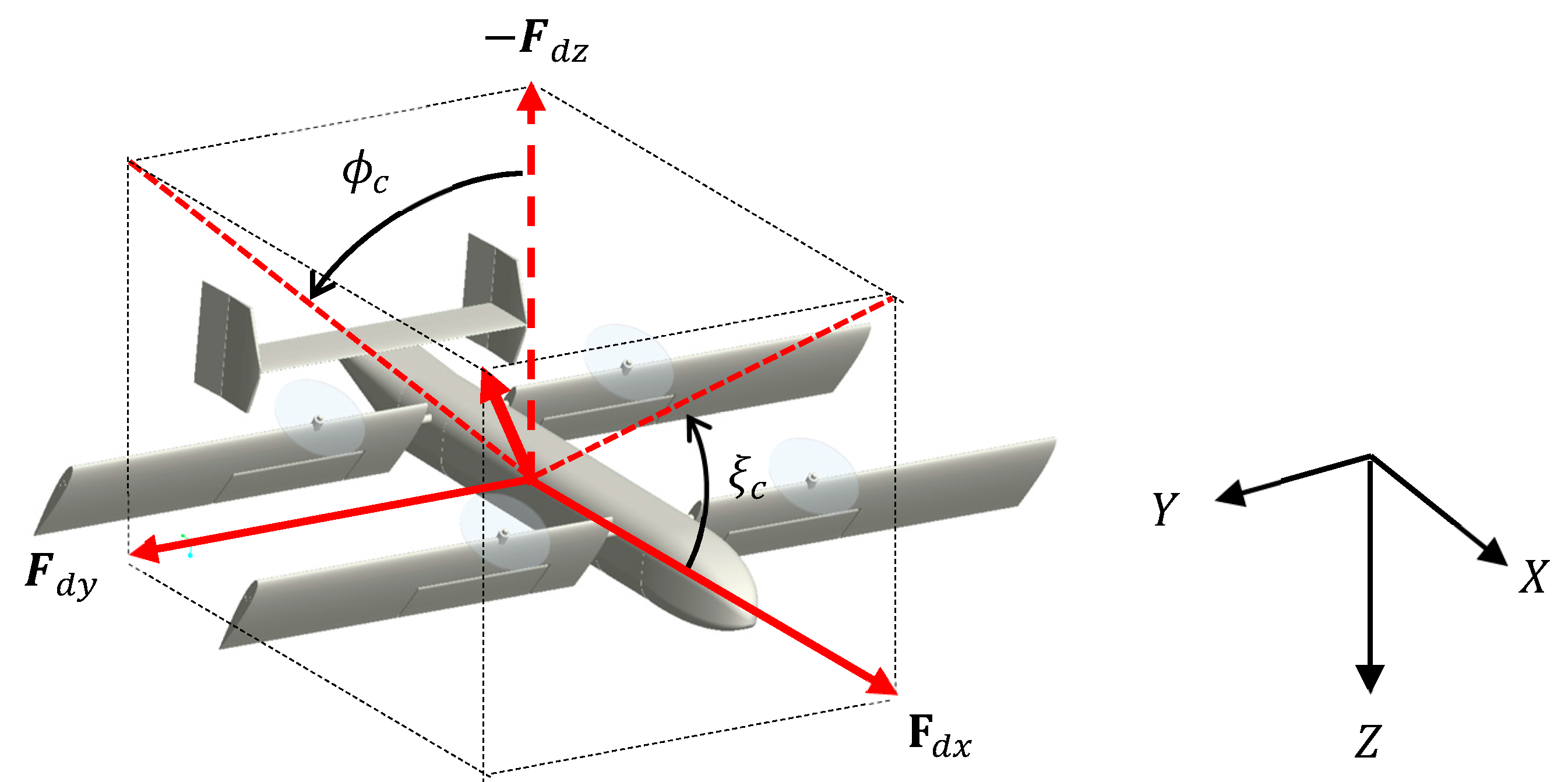
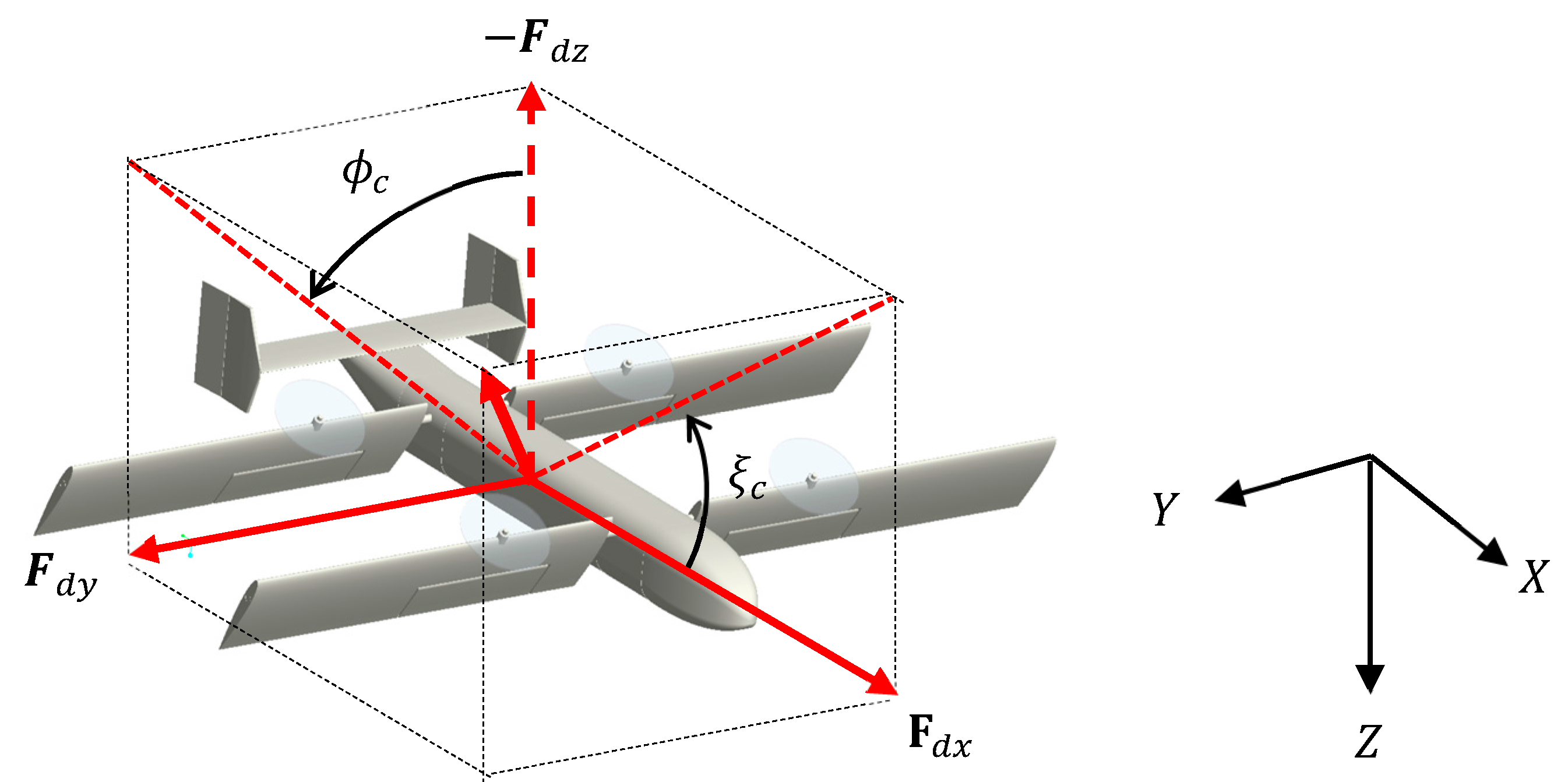
Euler angle commands for the rotational controller can be calculated from the components of
as shown in
Figure 6.
The tilt angle command
and roll angle command
are defined by the components, respectively, as
For simplicity, it assumed that the tilt angle of the front wing and the tilt angle of the rear wing commands are same value, and commands of pitch angle and azimuth angle are 0 degrees when calculating above commands in Equation (30).
The attitude error is obtained from the difference in a current attitude and desired attitude.
Differentiating Equation (31), the attitude of the UAV expressed by using Euler angle kinematics can be obtained.
Here, is the transform matrix as shown below.
Therefore, substituting the equation of rotational motion given by Equation (2) into Equation (32), the following equation is obtained.
where
, which is represented as
, is the moment vector in the body coordinate system of the UAV. The nonlinear term that includes the aerodynamic force is expressed as
. Let the term
with respect to the control input be a known parameter
, thus Equation (33) becomes the following equation.
The nonlinear term should be estimated by using the DAC observer because moment vector including aerodynamic force is generally an unknown parameter. is assumed to be a polynomial of time .
Equation (34) can be rewritten by using the estimated value of the DAC observer.
in which the observer gain is
.
and
are the observation values, which are the angle and its derivative obtained by a gyro sensor, and the estimated output vector, respectively. The observable states are attitude
and angular velocity
. The following equation is derived from Equations (35) and (36).
The observer gain
is designed by LQ method. The moment vector
for linearizing the error equation by applying the DI method is expressed by the following equation including nonlinear terms
estimated by the observer as follows:
where
is regarded as a new control input of the linearized system. If nonlinear term
that includes aerodynamic force in Equation (34) is accurately calculated, the nonlinear term in the rotational motion is completely canceled as Equation (40). In addition, the equation of rotational motion is rewritten as Equation (41).
It is noted that the uncertainty as estimated error in Equation (42) should be considered since the error actually occurs.
Therefore, the nonlinear term cannot completely be canceled even if DI method is applied to this system. Considering the above, Equations (40) and (41) are rewritten as follows:
The estimated error would lead to deterioration of control performance and instability of the system because LQ controller lacks robust property to cope with parameter perturbation or external disturbances.
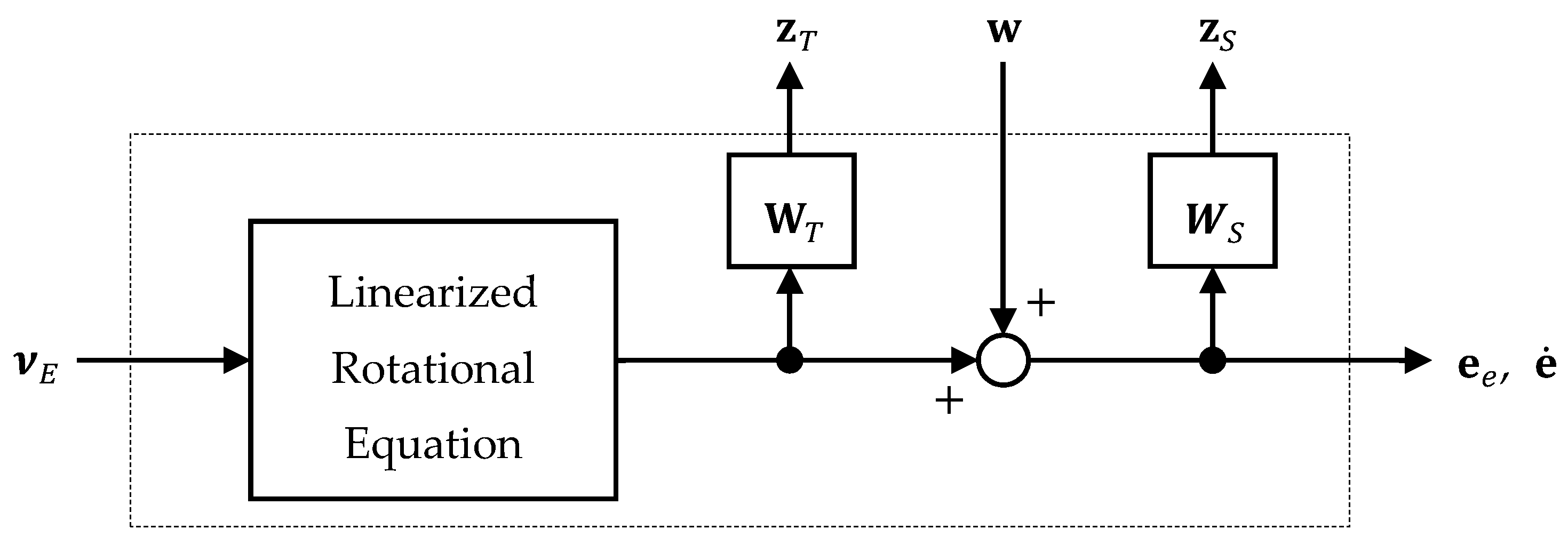
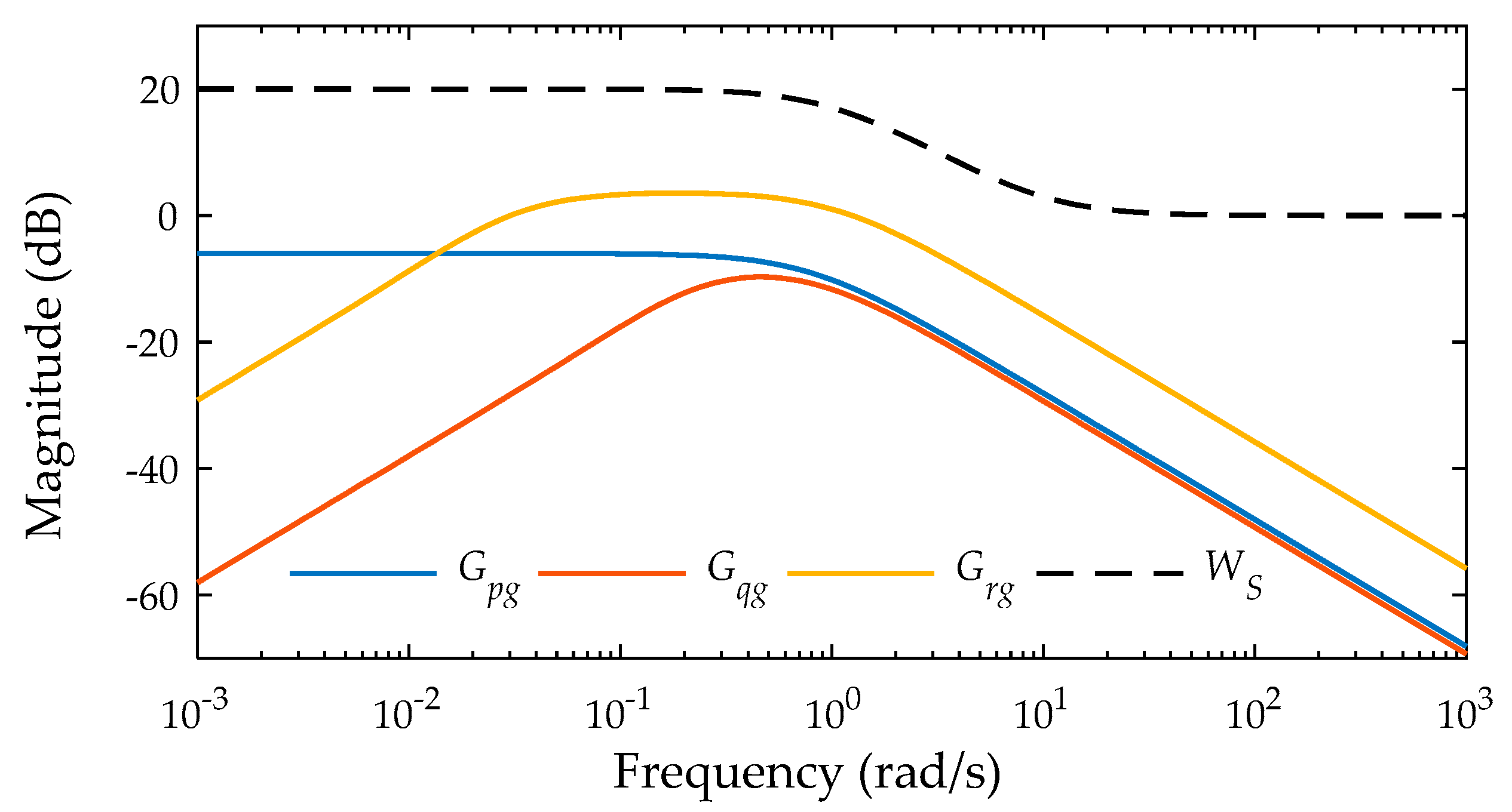
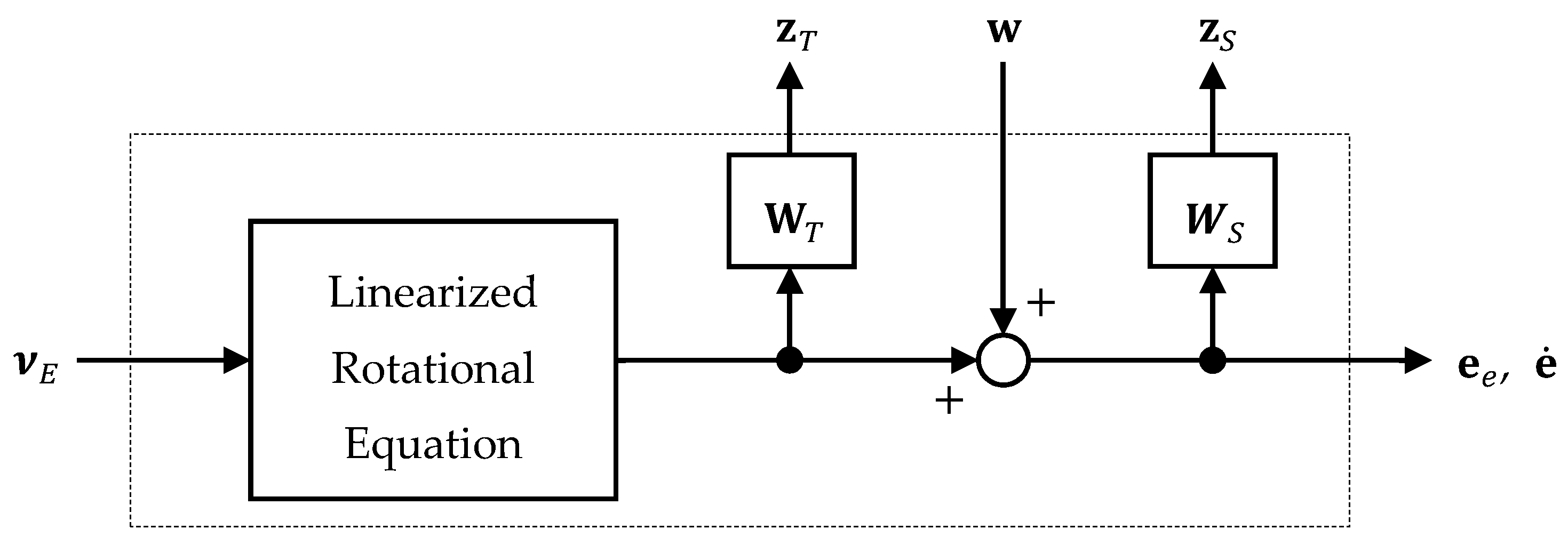
To overcome the problem, H-infinity controller is applied to the rotational motion of the UAV. Generalized plant of the system is as shown in
Figure 7. Inversion error caused by estimated error is treated as a multiplicative uncertainty. The proposed H-infinity controller based on the mixed sensitivity reduction problem is designed to suppress not only the influence of the uncertainty such as inversion error but also disturbances of wind and sensor noise.
In
Figure 7,
is disturbance input,
is evaluation output,
is a weighting function of multiplicative uncertainty in a frequency domain, and
is a frequency weighting function for reducing the influence of output the disturbance. Linear Matrix Inequality (LMI) solver is used to obtain the controller gain
. The control input is defined as
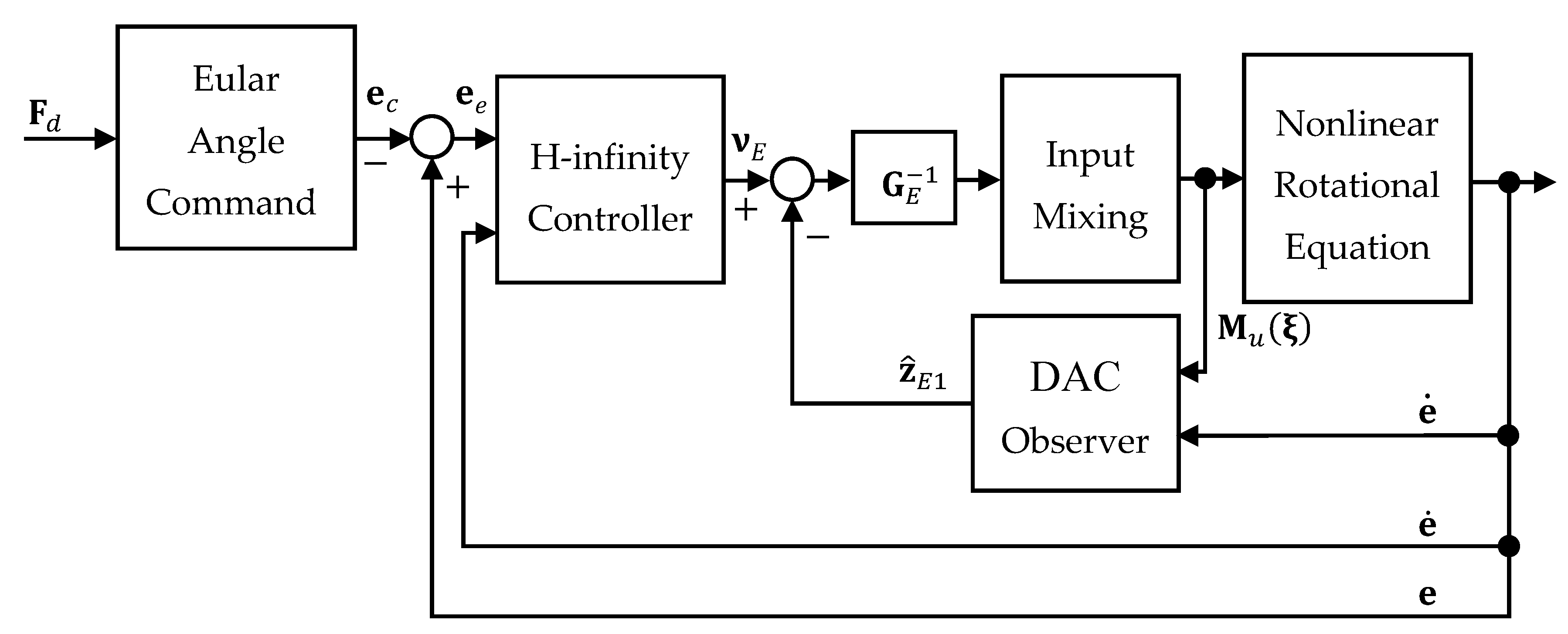
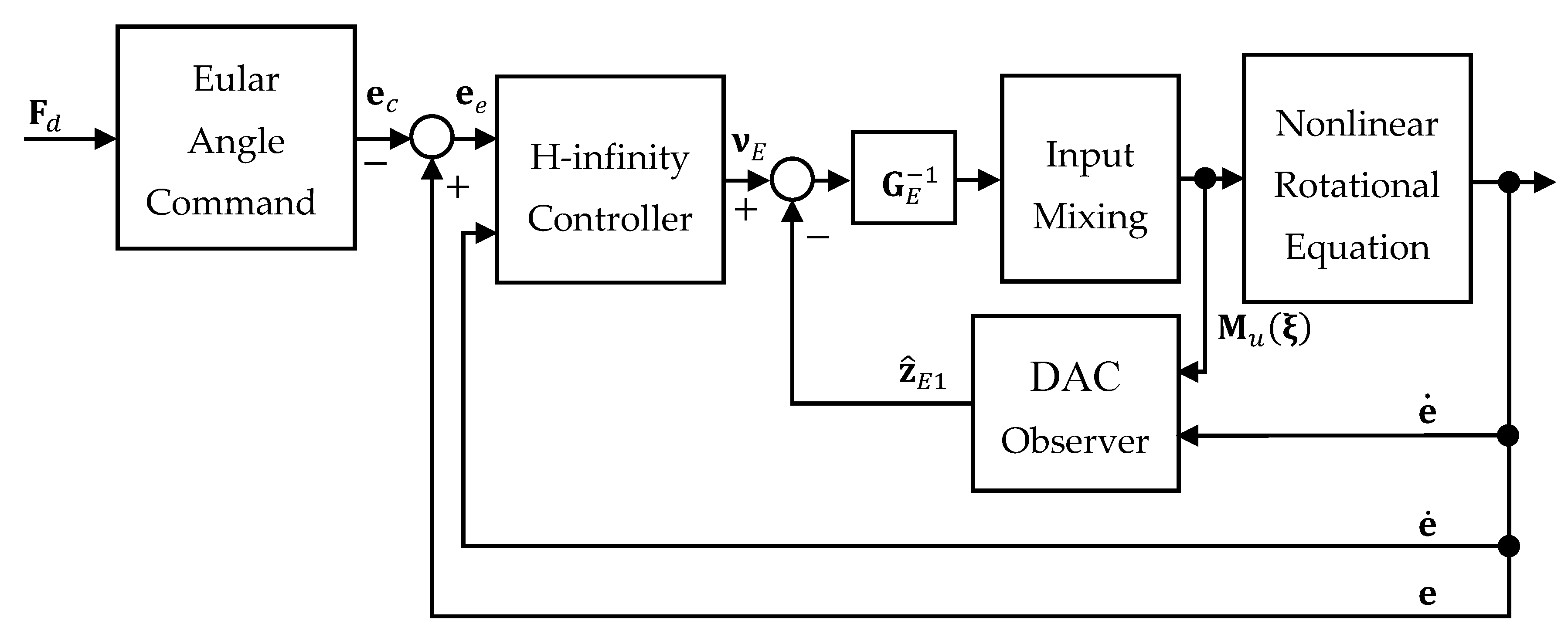
Figure 8 shows a block diagram of the proposed rotational control system.
3.3. Input Mixing
It is necessary to decide inputs of actuators for the input vector, the moment including the new control inputs and, and the nonlinear terms and. Since actuators are fixed in the body coordinate system of UAV, these inputs are replaced with the input vector and for the body coordinate system as shown in the following equation.
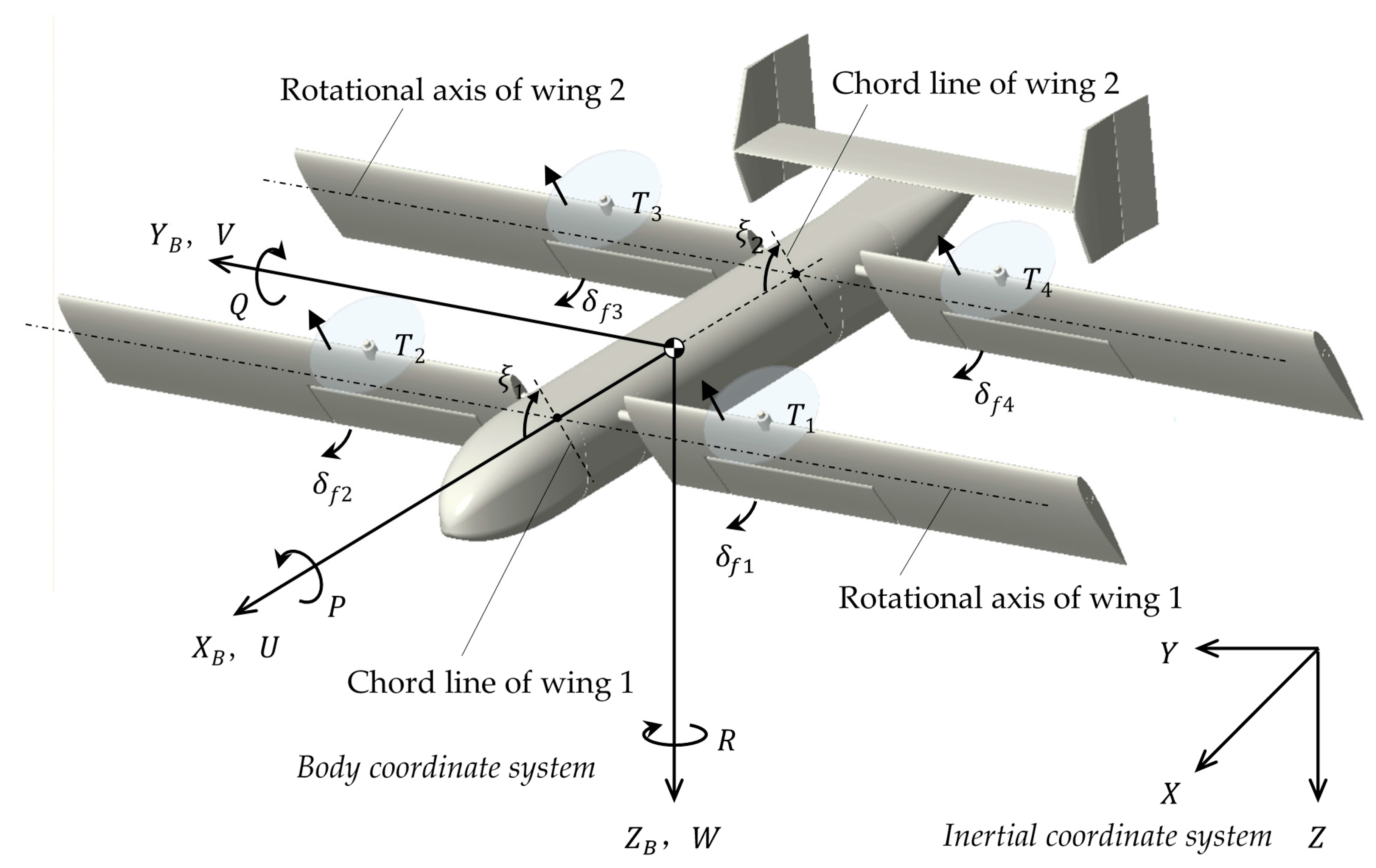
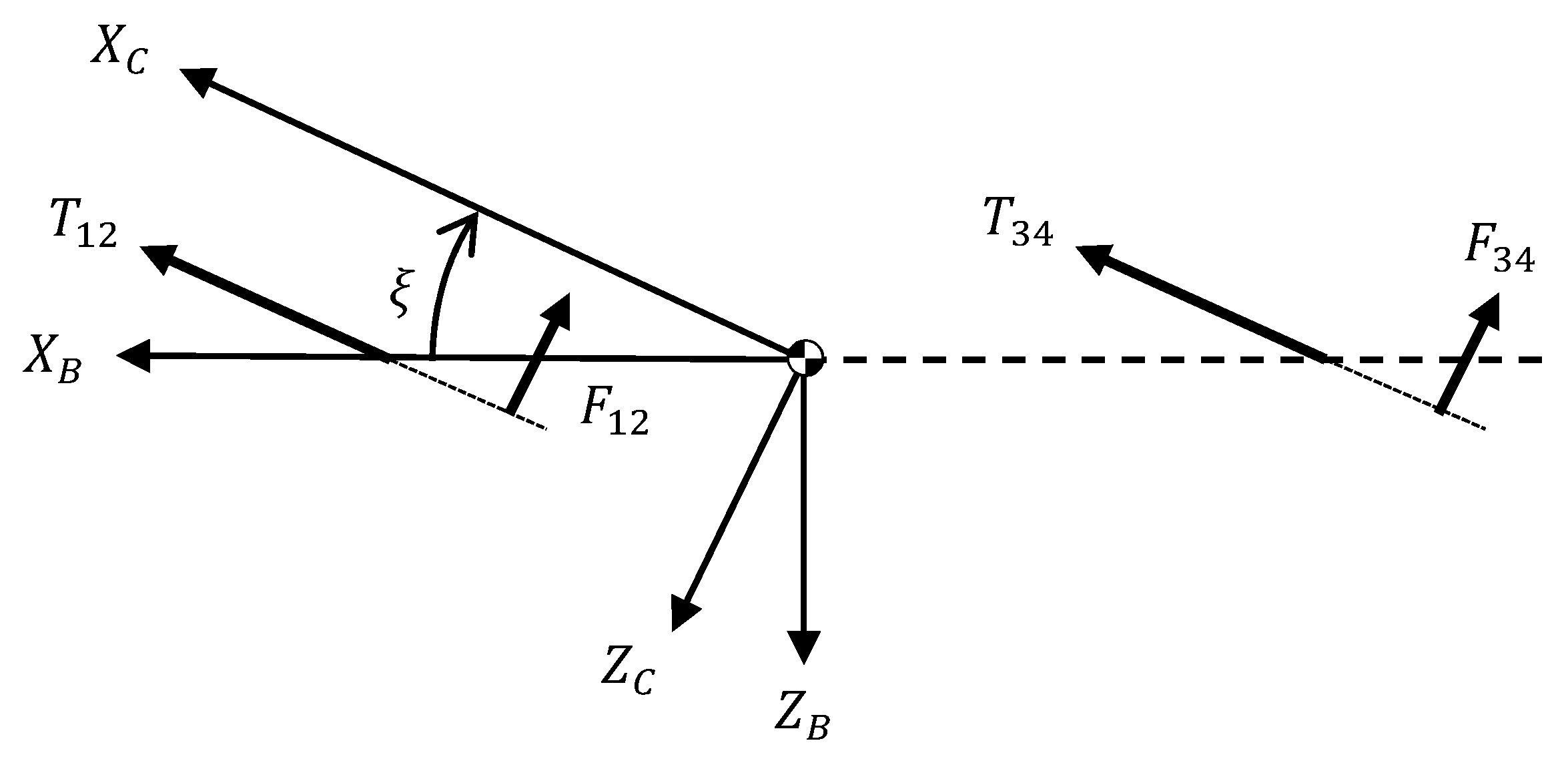
A QTW-UAV can change the direction of thrust generated by the propeller fixed at a tilt mechanism of wings. In order to simplify the distribution of the inputs of propellers and the flaperons, we define the actuator coordinate system with the propeller thrust direction as
axis as shown in
Figure 9.
It is assumed that the propeller thrust and the thrust generated by deflection of flaperon are orthogonal and the command values of the tilt angle of the front wing agree with one of the rear wing.
Transforming the inputs in Equation (46) to the actuator coordinate system as follows:
The input vector and the moment in the actuator coordinate system can be expressed by the following expression using the propeller thrust and the flaperon deflection thrust.
Using the above relationship, the propeller thrust and the deflection thrust of flaperon can be determined. The propeller thrust and the flaperon deflection force of each actuator are defined by using the input
.
where
is propeller thrust to realize force
, and
is flaperon deflection thrust to realize
. Then, the forces of each actuator to realize the input moment
are obtained as follows:
The forces of each actuator equally are divided so that the forces are the positive direction. A QTW-UAV cannot generate pitching moment due to propeller thrust at the tilt angle 0 degree. A small amount of flaperon deflection thrust can be generated when the tilt angle is around 90 degrees. Thus, the deflection thrust of flaperon is defined as the following equation by using a weighting function based on the sigmoid function. This means that flaperons are actively used at 0 degrees and propeller thrust are mainly used around 90 degrees.
where
is a coefficient related to the slope at the inflection point of the sigmoid function. Finally, inputs of each actuator can be obtained by combining these forces.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}