1. Introduction
Artificial intelligence-based control systems have become the main topic of much research. The recent developments in aircraft systems have increased pilots’ workload; our primary motivation in this paper is to reduce that workload and ease flight procedures for pilots, especially in critical conditions such as atmospheric turbulence. This objective could help to reduce aircraft accidents. As claimed in [
1], 80% of aircraft accidents are caused by human errors rather than system failures. The novel methodology proposed here benefits from the advantages of the approximation capability of the Type-Two Fuzzy Logic System (T2FLS) while facing existing uncertainties, the robustness of super-twisting sliding-mode control (STSMC), and the characteristics given by adaptation laws to update approximated functions by a T2FLS during the lateral motion simulation of the Cessna Citation X aircraft in cruise. The gains in the switching control term designed in the STSMC were determined by two different methodologies: one uses adaptation laws, and the other uses the Particle Swarm Optimization method, both of which are discussed in more detail later in this paper.
Concerning the selected methodologies in this article, a brief discussion of the previous studies is presented in this section to provide some essential background. These methodologies have been used for different applications in aerospace and aeronautics.
Satisfying the stability and maneuverability of an aircraft with a control system is essential to guarantee flight safety and passengers’ comfort. These problems have been addressed by a wide range of control techniques and methodologies, as detailed next.
Previously, conventional methodologies showed their compatibility and precision for various types of air vehicles. Idir et al. [
2] introduced a novel methodology using a combination of an optimal reduced-order fractional proportional–integral–derivative (PID) controller with the Harris Hawks Optimization Algorithm to control the pitch angle of an aircraft using the Matsuda and the Oustaloup approximation methods. Although these control methodologies have shown superior performance in terms of transient response analysis and the signal characteristics of the pitch angle compared to other controllers, it is necessary to add a robust controller to guarantee the boundedness of the control system, especially in the presence of a load disturbance. To control the pitch of a general aviation aircraft, Deepa and Sudha [
3] suggested using tuning methods such as the Zeigler–Nichols, modified Zeigler–Nichols, Tyreus–Luyben, and Astrom–Hagglund methods to find the gains of a PID controller. Based on the presented performance analysis, the Zeigler–Nichols method found more appropriate gain values to remove drastic oscillations, which can be used for both linearized and nonlinear aircraft models. Wilburn et al. [
4] developed a new Genetic Algorithm (GA) to optimize the performance of several controllers, including a PID, a Nonlinear Dynamic Inverse (NLDI), and an adaptive PID. The enhanced GA used in this paper benefits from excessive normalization, proposing a mutation operator matrix, varying parameter bounds, and initializing the GA population with predefined values. This study demonstrated that this novel GA algorithm can be used with other controllers, such as artificial immune system-based PID control systems, with the aim of improving the robustness and trajectory tracking performance of an Unmanned Aerial Vehicle (UAV). Moreover, the efficiency of an optimized bio-inspired adaptive control approach with a GA was evaluated in [
5] to compensate for aircraft failures. In addition to addressing these failures, that study highlighted the ability of the proposed method to significantly improve aircraft handling qualities. The proposed adaptive immunity-based controllers acted as model-referenced baseline control systems to generate control inputs for the angular rates. This baseline control system and a nonlinear dynamic inversion (NLDI) approach were developed to deal with nonlinearities. Compared with an adaptive neural network system, the combination of the adaptive immunity-based controllers and NLDI provided better results in nominal and abnormal pilot-in-the-loop simulations.
In [
6], extensive studies were conducted to evaluate the performance of Linear Quadratic Regulator (LQR), Linear Quadratic Gaussian (LQG), and nonlinear methods for controlling the pitch angle of a UAV. Among these control methods, the LQG successfully attenuated the disturbance, and the LQR performed better under ideal flight conditions. In contrast, the nonlinear control system outperformed both the LQR and LQG methods in terms of smoothness of the response, robustness, and speed of convergence to the reference signal. Further exploration by Vishal and Ohri [
7] showed that a Genetic Algorithm (GA) can effectively adjust the parameters of LQR and PID controllers, offering better results in terms of pitch angle control of an aircraft compared to its parameters manual adjustments. Between the GA-based PID controller and the GA-LQR combination, the GA-LQR offered better signal characteristics, such as rise time, settling time, and peak overshoot. In addition, the steady-state error obtained for the GA-LQR was smaller than that of the GA-based PID method. Qi et al. [
8] developed a Modified Uncertainty and Disturbance Estimator (MUDE) for achieving accurate attitude-tracking performance in quadcopters using a precise actuation model. This method was compared with cascaded PID and conventional uncertainty and disturbance estimator-based controllers. This comparison revealed that the MUDE-based controller performs better in reducing both tracking and disturbance estimation errors. Furthermore, to solve the path-following problem and attain asymptotic stability for a minimum of three quadrotors, a Robust Load Priority (RLP) control system was proposed in [
9]. In this article, a nonlinear control system was developed by leveraging Kane’s method with the direct Lyapunov method to convert the position and attitude errors into a virtual lift control input. This control input helps the quadrotors to rotate and manipulate their loads. On the other hand, a UDE-based robust controller was proposed for a single quadrotor to achieve path-tracking control performance while lifting a suspended payload under disturbances. A two-loop control system was implemented to address external disturbances, such as turbulence, on fixed-wing UAVs flying at low altitudes [
10]. It included an LQR and
and a Luenberger observer serving as a full-state estimator. In addition to mitigating the effects of disturbances, this control method ensured the safety margin of the UAVs with respect to the ground by tuning the reference altitude. The L1 adaptive control system is another methodology, which was applied in [
11] as a fault-tolerant control system to address the challenges caused by actuation failures and turbulence. This control mechanism enhanced the functionalities of a linear controller, and an extended NLDI control system was developed to reduce the distance error with respect to the desired flight path of the West Virginia University Unmanned Aerial Vehicle (UAV). To deal with parameters uncertainties, disturbance, and coupled dynamics in quadrotors, Labbadi et al. [
12] have developed super-twisting proportional–integral–derivative sliding-mode control (STPIDSMC) methodologies based on the fractional-order control methodology for each of the position and attitude control systems. This combination offered a highly robust and accurate tracking performance under various scenarios in comparison with fractional-order backstepping sliding-mode control and nonlinear internal control systems by considering their Integral Absolute Error (IAE) values. In addition, to satisfy the 3D trajectory tracking performance of quadcopters, a group of six second-order sliding-mode control (SMC) systems using the super-twisting algorithm within two separate controller mechanisms, one for attitude and altitude of the quadcopters and the other one for the position of the quadcopters, was proposed by Matouk et al. [
13]. Compared to a conventional SMC and a fuzzy sliding-mode control system, this control methodology provided improved model robustness to parametric variations, uncertainties, and disturbances and gave more accurate tracking performance without undesired chattering.
In recent years, the evolution of control methodologies has seen a significant shift from conventional approaches to AI-based techniques, demonstrating a broad spectrum of very good adaptability and precision. As an AI-based control system, Deep Recurrent Neural Networks (DRNNs) were used to control highly nonlinear hypersonic vehicles [
14], offering very high adaptability to time-varying trajectories and robust performance in the presence of aerodynamic uncertainties. The DRNNs were equipped with gated recurrent units at the hidden neurons to enhance long-term learning and avoid the gradient decay problem. This paper showed that the proposed DRNN-based controller could perform better than the gain-scheduled LQR control approach. This study, among many others, highlights a significant shift from traditional control methods toward exploiting the adaptive capabilities of neural networks. An Aggregated Multiple Reinforcement Learning System (AMRLS) with multiple Reinforcement Learning (RL) algorithms and Cerebellar Model Articulation Controller (CMAC) techniques was proposed in [
15] to solve the problem of the exponential increase of dimensionality due to the excessive size of continuous state space equation form used for the pitch control of a B747 aircraft. This control algorithm accelerated the convergence rate and reduced the steady-state pitch error. Furthermore, Andrianantara et al. in [
16,
17] explored advanced control strategies for the pitch rate control of the Cessna Citation X (CCX) business jet. In [
16], a linear PID control system was combined with an adaptive neural network (ANN) and dynamic inversion (DI) methodology to achieve tracking performance and to ensure aircraft stability without prior knowledge of aircraft dynamics. This control methodology gave better results than single PID, PID-DI, and PID-NN control systems. With the same objectives, Andrianantara et al. [
17] integrated an adaptive neural network system with an online Recursive Least Square (RLS)-based Model Predictive Controller (MPC) to control the CCX pitch rate under different flight conditions.
According to [
18], different controllers, such as PID, fuzzy PID, and sliding-mode control systems, might be chosen for controlling the pitch rate of an aircraft in the presence of unpredicted conditions such as external disturbances. In this article, although the fuzzy PID control system showed the best signal characteristics in terms of tracking performance, besides its ability to update the control parameters during the simulation, the SMC systems worked perfectly in terms of both rise and settling times among all the presented methods. Nair et al. [
19] studied the performance of a Linear Quadratic Controller (LQR) system and a Fuzzy Logic Controller (FLC) based on their time response characteristics in controlling the aircraft yaw rate. This study revealed that both methods have specific steady-state errors and overshoots; however, the LQR controller converges to the given desired signals faster than the FLC system. With the aim of achieving a robust automatic landing system in the presence of coupling effects and uncertainties, a proportional–derivative fuzzy logic control system was developed for the nonlinear six-degree-of-freedom models of a medium-sized aircraft. The performance analysis illustrated that this control methodology was appropriate in terms of the stability and steady-state error criteria [
20]. Jiao et al. [
21] focused on the stability of quadrotor Unmanned Aerial Vehicles (UAVs) equipped with a 2-degree-of-freedom robotic arm and a combination of Sliding-Mode Extended State Observer (SMESO) and a Fuzzy Adaptive Saturation Super-Twisting Extended State Observer (FASTESO) that updated observer gains for the accurate attitude control in the presence of disturbances. In addition, an adaptive super-twisting sliding-mode methodology was developed by Humaidi and Hasan in [
22] to control a two-axes helicopter with uncertainties in its model to achieve tracking performance while reducing the chattering on the control input. This control model was equipped with the Particle Swarm Optimization (PSO) algorithm to find the best values for the design parameters.
Dealing with uncertainties is another challenging issue for aircraft control. Hashemi and Botez [
23] suggested using a robust adaptive T-S fuzzy logic control system for the Hydra Technologies UAS-S4 Ehécatl to handle various uncertainties, such as unknown parameters in the control system, modelling errors, and disturbances. To minimize energy consumption, improve tracking performance, and maintain stability in a chaotic environment in a Click Mechanism Flapping Wing (CMFW) of an insect-inspired Nano Air Vehicle (NAV), which was defined by T-S fuzzy rules, the authors in [
24] proposed using a fuzzy controller integrated with a state feedback control system. In this methodology, the gains of the fuzzy logic-based control system were updated using several adaptive control laws derived from the Lyapunov theorem.
Yu et al. [
25] validated the performance of a fault-tolerant control method for UAVs to maintain their attitude with the occurrence of failures in the actuation system while dealing with the existing model uncertainties. This control system employed a fractional-order-based control system based on an adaptive fuzzy neural network system to approximate the uncertainties due to the failures in the follower UAV actuation systems. In addition, distributed sliding-mode systems were designed to estimate the attitudes of the leader UAVs to ensure attitude-tracking performance and to achieve a safe formation. As another fault-tolerant control system for UAVs, a new event-triggered methodology was included using fractional-order calculus and interval type-2 fuzzy neural network systems to satisfy attitude-tracking performance and stability [
26]. The stability of the UAVs was demonstrated by analyzing their performance at different attitudes while tracking the issued reference signals. These control systems have reduced the communication load while improving the fault tolerance properties in this application. Moreover, it was suggested in [
27] to apply a combination of fixed-time performance functions, fractional calculus, and sliding-mode surfaces, enhanced by recurrent fuzzy neural networks, to keep the tracking errors within certain bounds and improve fault tolerance characteristics of the UAVs in the presence of actuators faults.
Continuing the investigations outlined for the longitudinal motion of a Cessna Citation X using fuzzy logic-based control systems in [
28,
29] and a model reference adaptive recurrent neural network control system in [
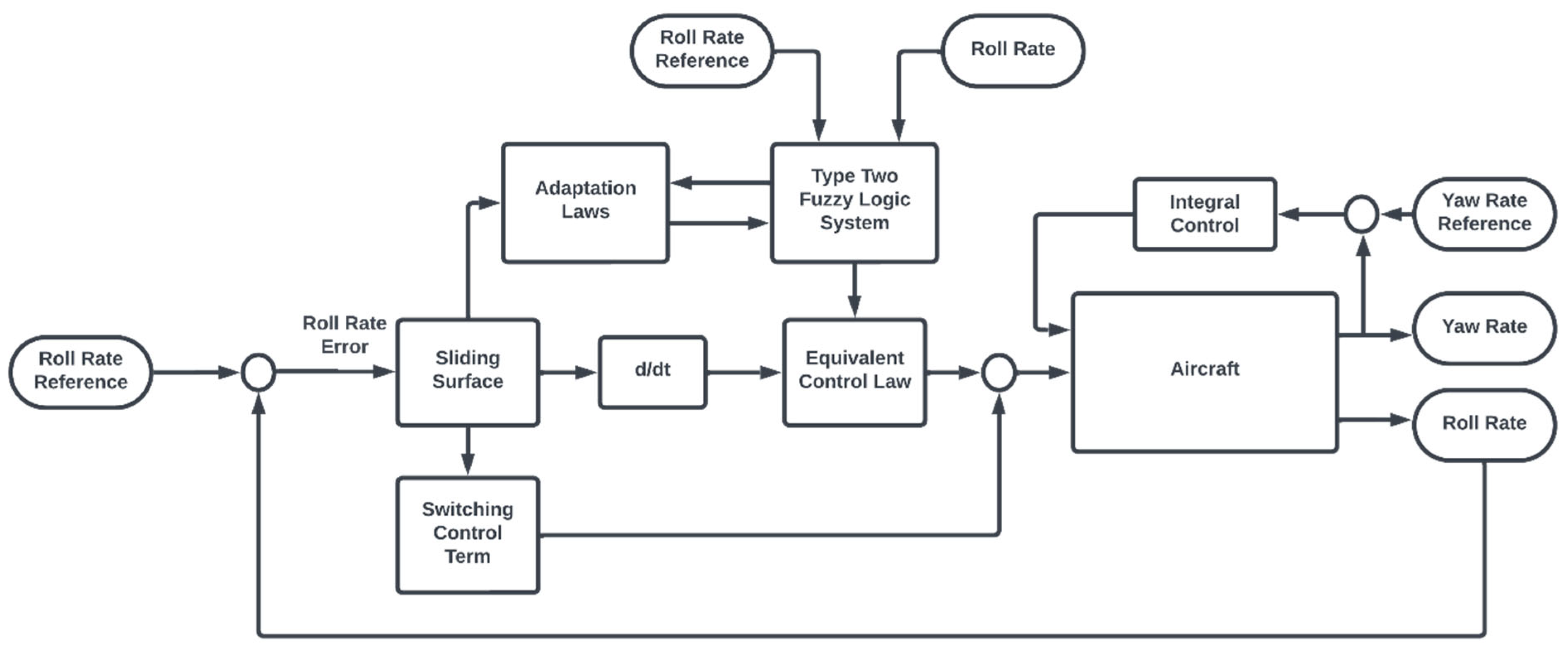
30], this study aims to explore their compatibility with the lateral motion of the aircraft, which is more complex than the longitudinal motion due to the coupling between the roll and yaw motions. Therefore, this paper mainly contributes to the application of an artificial intelligence methodology with the Type-Two Adaptive Fuzzy Logic System (T2AFLS) combined with a nonlinear super-twisting sliding-mode control (STSMC) system for the lateral motion of aircraft, as detailed below:
Previously, most studies were devoted to designing an AI-based controller for the longitudinal motion of aircraft. However, this article presents a new combination of control systems comprising T2AFLS and STSMC methodologies for the lateral motion of the Cessna Citation X aircraft. This methodology addresses two main challenges in the control of an aircraft: (1) the issues that arise with structured uncertainties, such as variations of flight conditions, and unstructured uncertainties, such as unmodeled parameters, and (2) aircraft stabilization in the presence of turbulence. We used the Dryden turbulence model to generate a moderate-intensity turbulence profile, which has not been used before with the considered methodology in the paper. This controller benefits from an improved uncertainty handling offered by the T2FLS, while the adaptation laws determined based on the Lyapunov theorem help to continuously update the approximated function by the fuzzy logic system. Enhanced robustness and stability were achieved using a nonlinear super-twisting sliding-mode control (STSMC). Two methodologies were employed to fine-tune the gains in the STSMC term: (1) adaptive control laws (calculated by the Lyapunov theorem) presented later in this paper [
31,
32], and (2) the Particle Swarm Optimization (PSO) algorithm. Although the adaptation laws used for the switching control term in this paper were designed based on the methodology proposed in [
32], our new method suggests combining the T2AFLS-based approximator with the adaptive super-twisting sliding-mode control, a considerable contribution to the theory. The performances of these approaches are compared to each other to help the reader understand the advantages of each method in this particular application. The validation process was conducted across the entire flight envelope (over 925 flight conditions covering the whole flight envelope) to ensure its reliability and effectiveness with and without turbulence.
The super-twisting sliding-mode control system (STSMC) has been studied for different aircraft types alone and with other control systems [
21,
22]. The methodology proposed here is novel according to several features; for example, in [
21], the authors combined the Type-One Adaptive Fuzzy Logic System (T1AFLS) with the STSMC, where the T1AFLS was employed to approximate the gain in the switching control term, whereas the proposed Type-Two Adaptive Fuzzy Logic System (T2AFLS) in our paper was used to approximate the unknown dynamics of the aircraft. Furthermore, our controller employs two methodologies to find the gains in the switching control term formulated based on the super-twisting algorithm, the adaptive switching term, and the optimized switching term by using the PSO algorithm. Although the authors in [
22] applied the PSO algorithm to optimize those gains, our methodology offers some improvement. Our paper proposes a different cost function to optimize three parameters, which could reduce the computational burden regarding the number of iterations and the swarm population compared with the one used in [
22] for optimizing eight parameters.
We validated our new methodologies using a highly accurate nonlinear simulation platform designed with actual flight data derived from a Level-D Research Aircraft Flight Simulator (RAFS) for Cessna Citation X business aircraft. We believe this simulation platform can precisely represent the dynamics of Cessna Citation X aircraft at each flight phase. This paper is thus among the pioneer articles that applied this methodology to a business aircraft containing much more nonlinearities and complexity than the Unmanned Air Vehicles (UAVs) [
21], helicopter models [
22], Teledyne Ryan BQM-34 (Firebee) aircraft used in [
32], quadrotors [
12,
13], and hypersonic aircraft [
20].
The rest of this article is organized as follows:
Section 2 begins with a description of the lateral aircraft model, followed by a detailed explanation of the applied control methodology in
Section 2.2. Next,
Section 3 discusses the simulation results for each control approach, including a comparison of their performances. This paper will be concluded in
Section 4.
3. Results
To evaluate the performance of the proposed control system, the nonlinear model of the Cessna Citation X business jet presented in
Section 2.1 was used. For this purpose, a total of 925 different flight conditions were selected by varying aircraft weight (lbs), center of gravity position (%) of the chord, altitude (ft), and calibrated airspeed (kts), as shown in
Table 3. These 925 flight conditions were selected to cover the entire flight envelope of the Cessna Citation X aircraft.
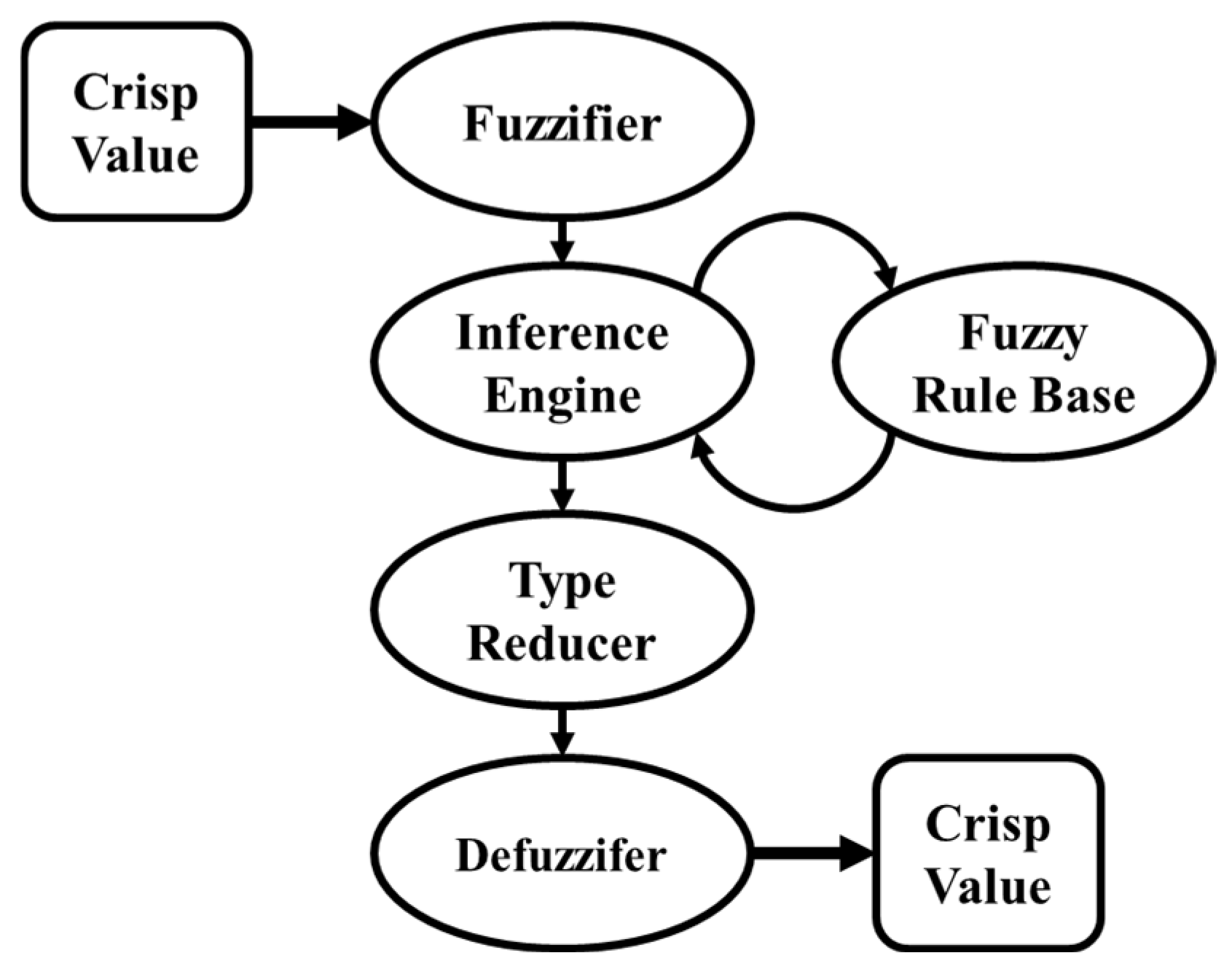
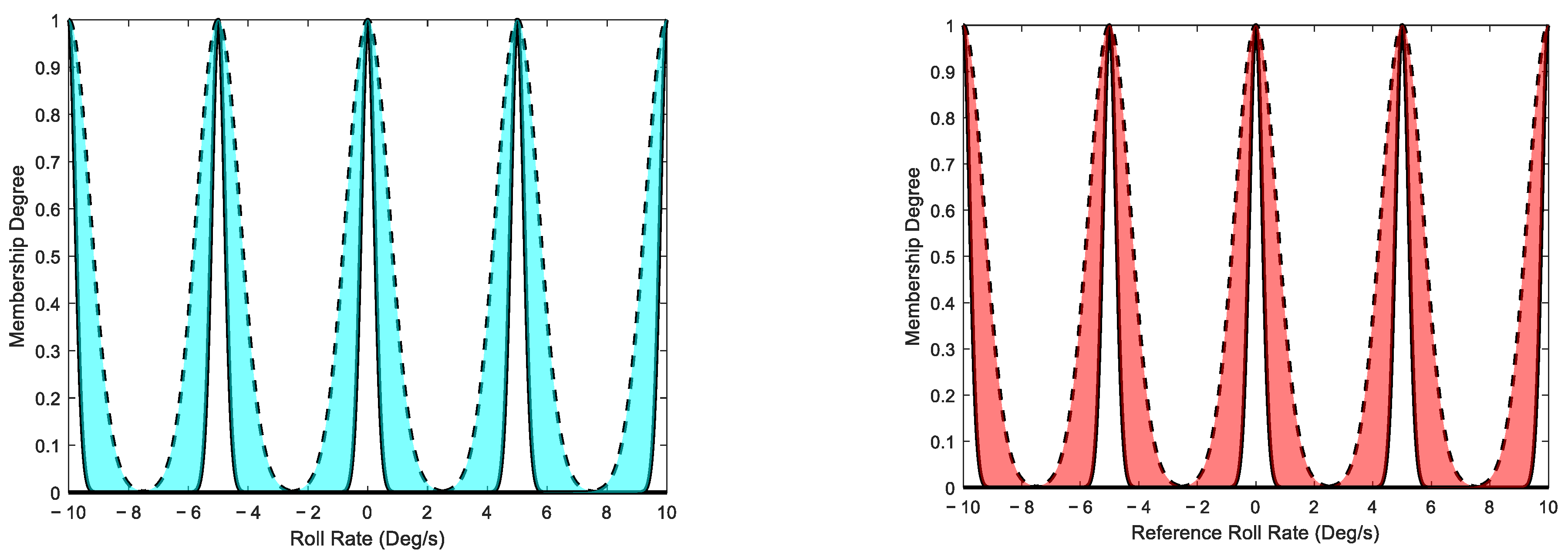
In the first step, as they are the inputs of the fuzzy system, the roll rate and roll rate reference signals must be fuzzified by the membership function given in Equation (3), whose parameters are defined in
Table 3 (these values were found on a trial-and-error basis with respect to the tracking performance of the controller). For each variable, five membership functions were distributed uniformly over the interval of [−10,10] degrees for both upper and lower membership functions for each variable,
and
, as shown in
Table 1.
We decided to follow two different approaches to select the best parameter values used in the sliding-mode switching control term (1) by using the adaptation laws in Equation (30) to find
and
(the optimal values for the other parameters were chosen by the designer, taking into account the tracking performance) and (2) by using the PSO algorithm described in
Section 2.2.3 to find
,
, and
in Equation (33), returning the values presented in
Table 4. To find the best values for each of these parameters, we tried different numbers of iterations and population sizes, and it revealed that increasing the number of iterations did not change the results significantly; therefore, the PSO algorithm was designed using the parameters given in
Table 4 for both ideal and turbulent flight conditions.
It should be noted that the bounds
and
were selected to optimize all three parameters,
,
, and
at the same time. Accordingly, the design parameter values are presented in
Table 5 for the T2AFSTSMC with both methodologies, the adaptation laws and the PSO algorithm, as follows. The PSO algorithm was used to determine the values of
,
and
in an offline process, and they remained fixed during the simulation across all flight conditions.
The parameter values of the control system design are given in
Table 5. Based on the simulation results for 925 flight conditions, the suggested controller could perform adequately in ideal and turbulent conditions. In addition to the signal analysis provided for the obtained results in this section, a more detailed evaluation will be presented next using two tracking error metrics: the Mean Absolute Error (MAE) in Equation (39) and the Max Absolute Error, which is calculated for each flight condition to understand better the performance achieved by each control system. These assessments will be presented later in this section.
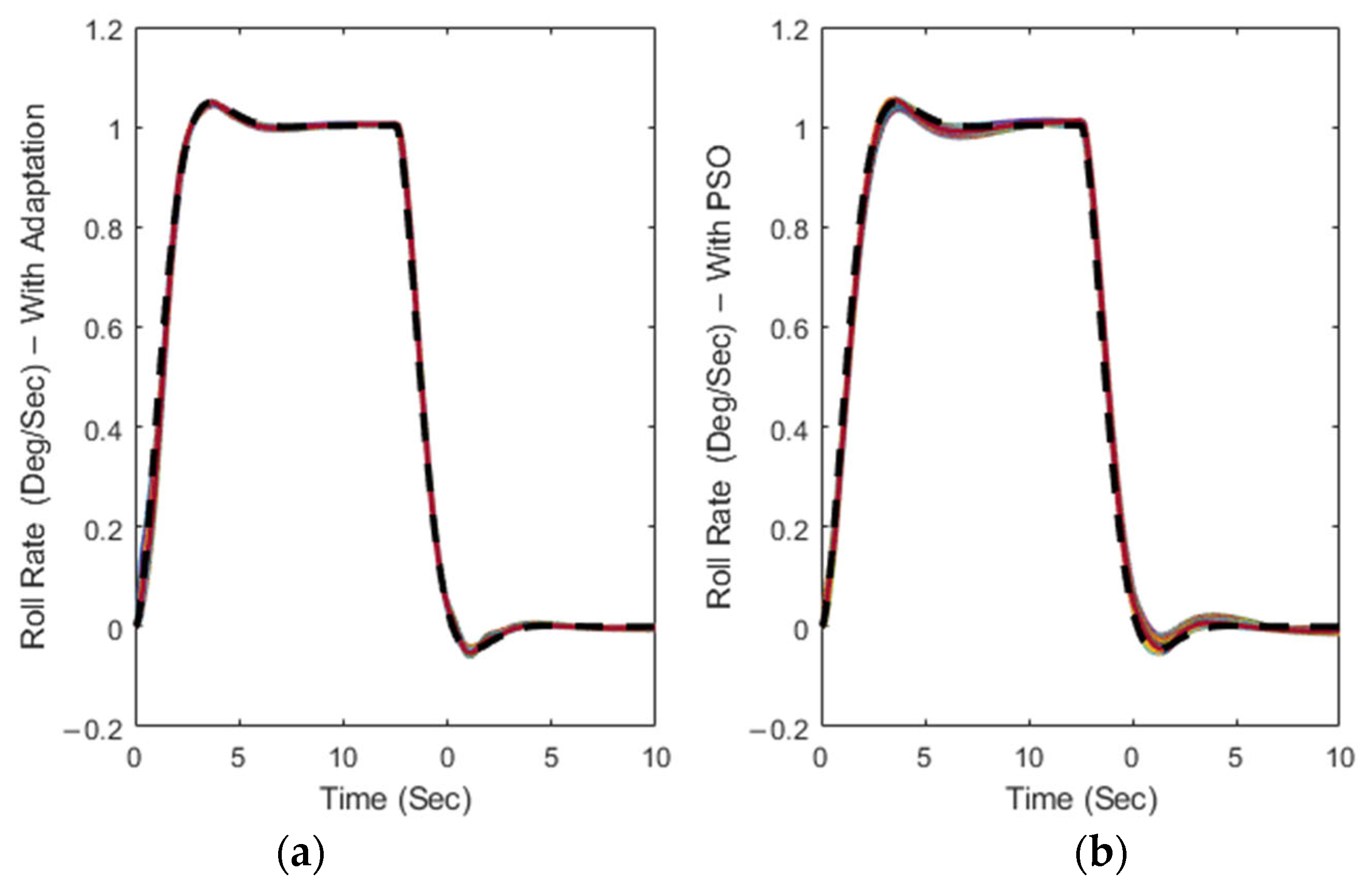
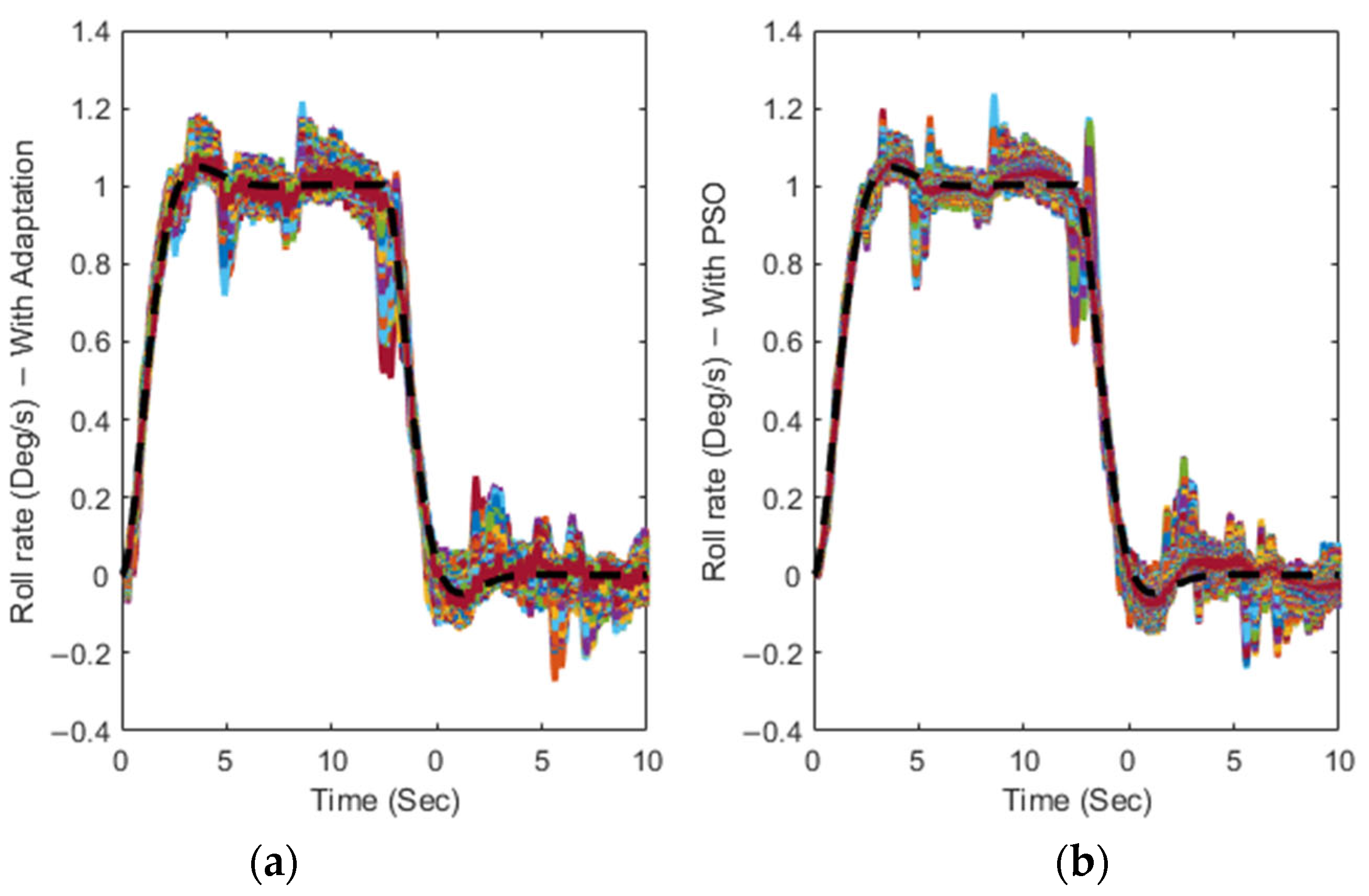
As shown in
Figure 5, the controller with both types of switching terms could meet the tracking performance, as the roll rate could follow the reference signal. However, the T2AFSTSMC, equipped with an adaptive switching term, could perform slightly better than the PSO-based T2AFSTSMC in tracking the roll rate reference signal. This better performance of the adaptive switching term was achieved because the adaptation laws were able to stabilize the aircraft more effectively by updating the gain values during the simulation rather than by using the fixed parameters found by the PSO.
As indicated in
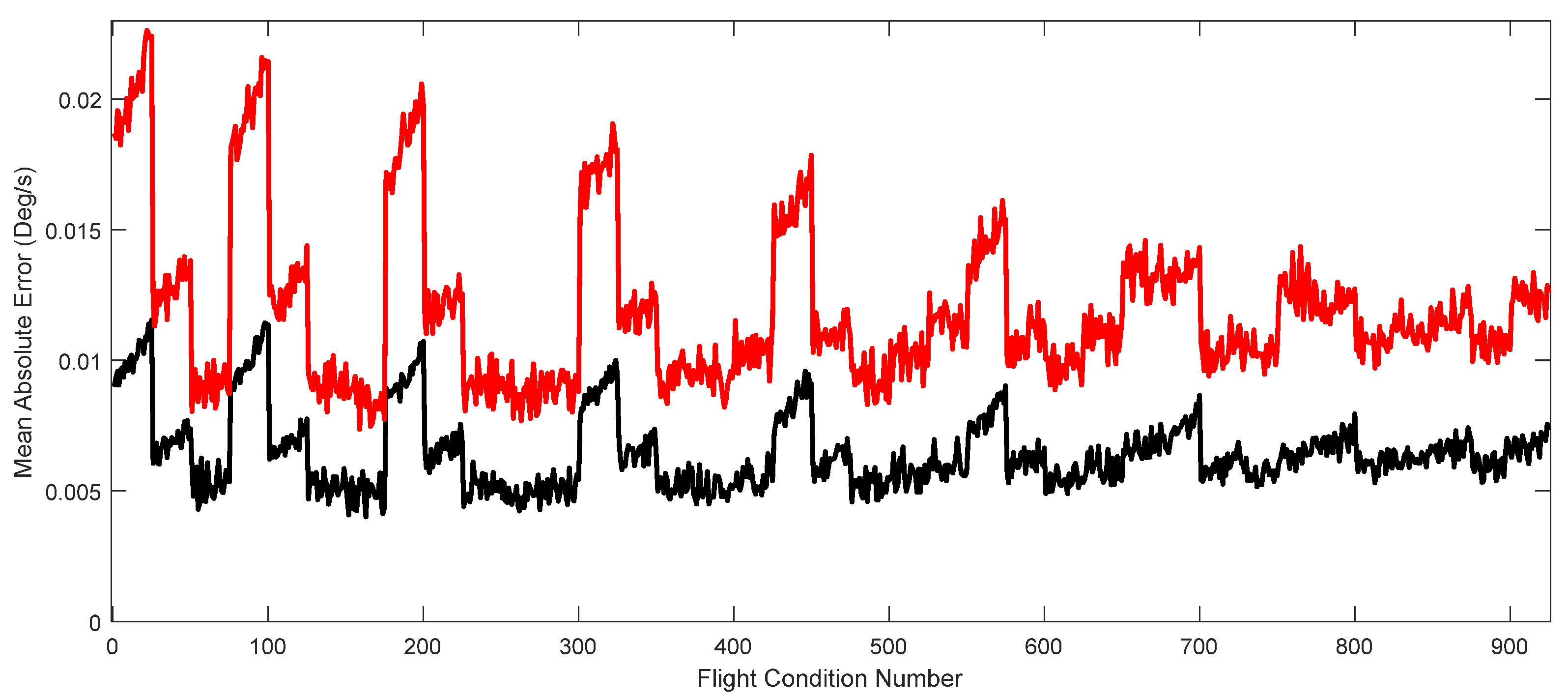
Figure 5, the results seem to be similar. Therefore, to determine which method performed better in the control of the roll rate of the Cessna Citation X aircraft, another evaluation is presented in
Figure 6, based on the reference signal tracking. This figure shows that the T2AFSTSMC with adaptive switching control can perform better than the PSO-based one in ideal flight conditions, as the Mean Absolute Error (MAE) values (in black) were negligible and consistently smaller than those obtained with the PSO algorithm.
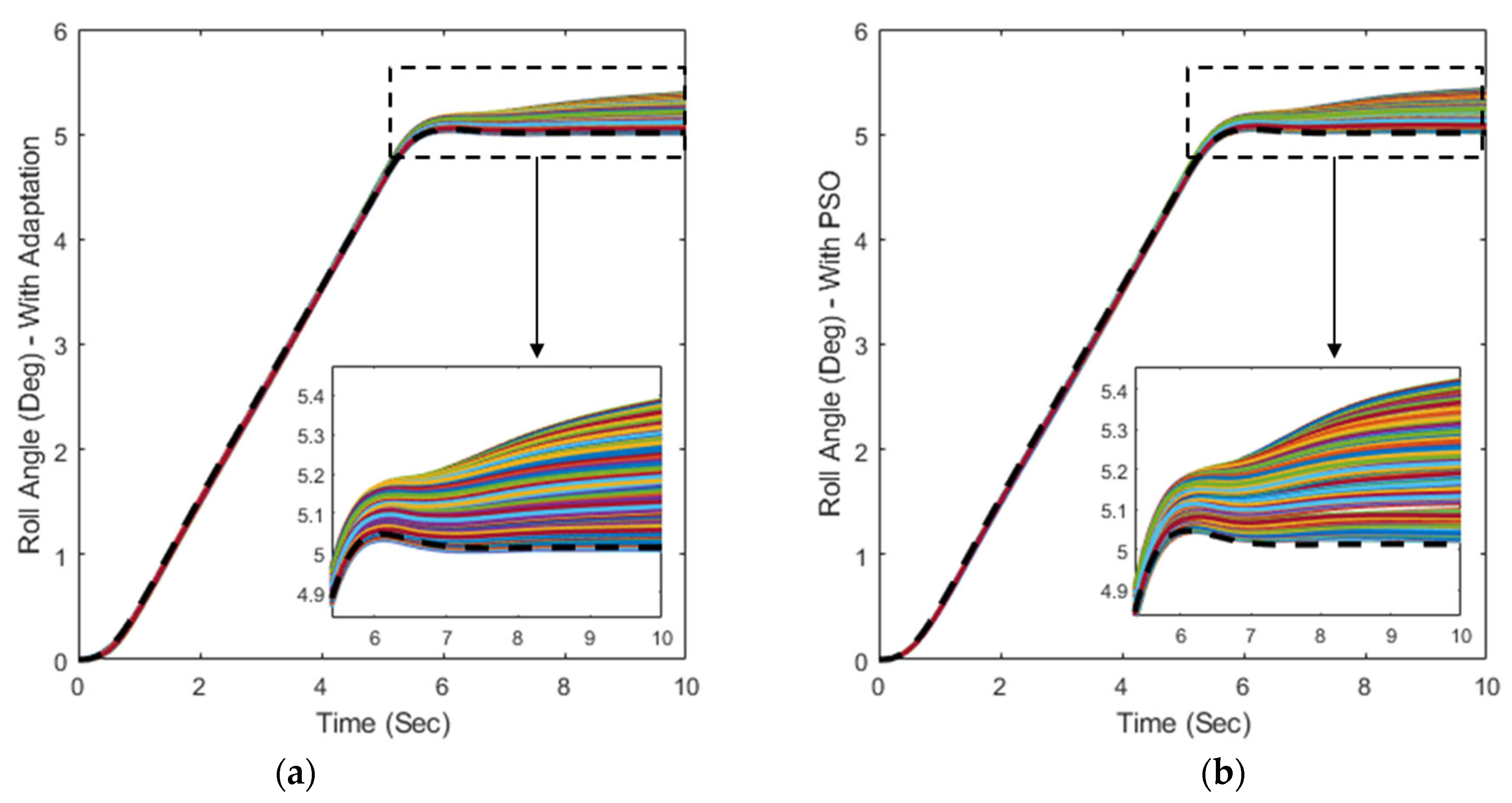
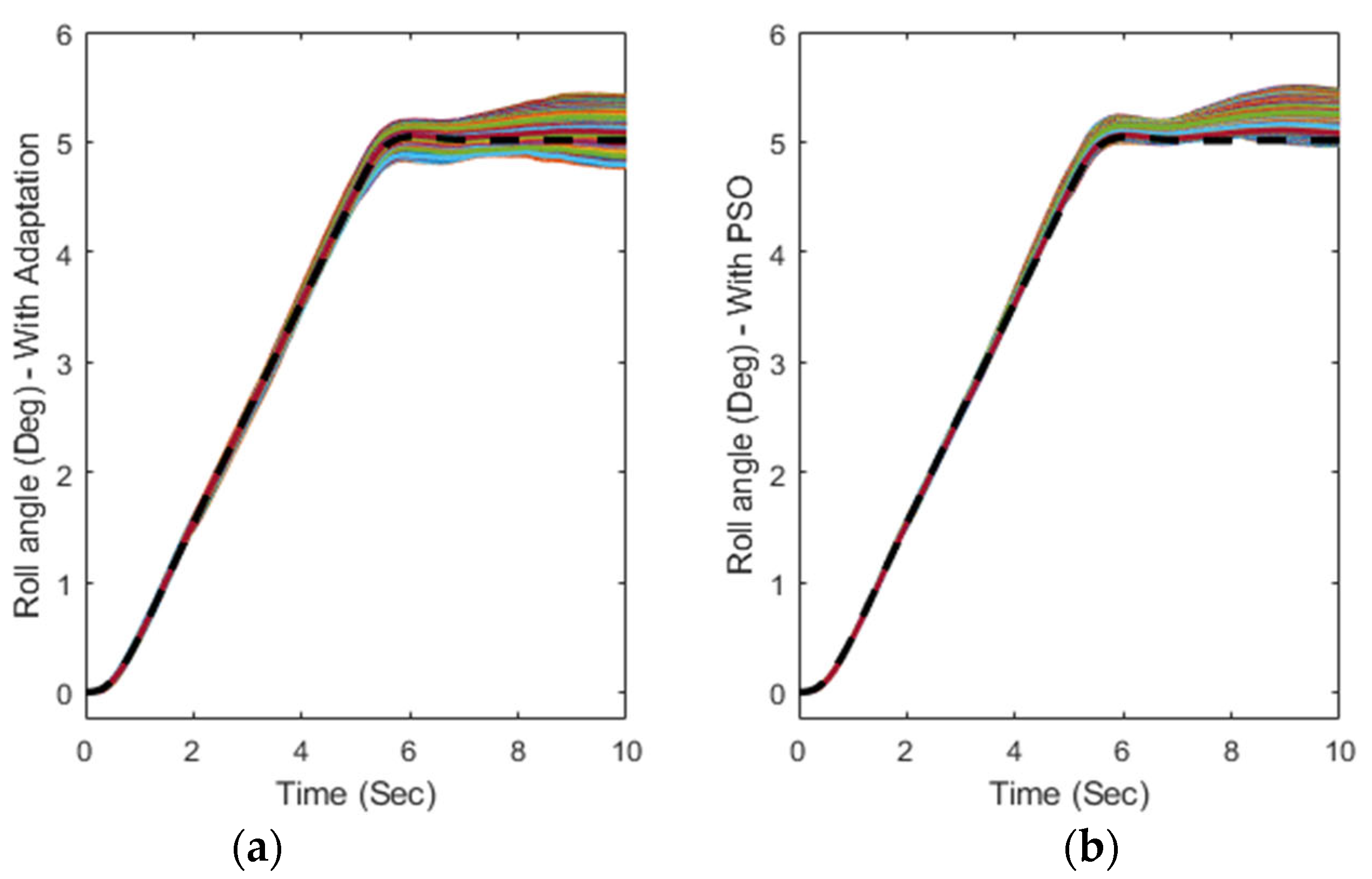
In addition, the performance of the control system was assessed in terms of roll angle variations, as shown in
Figure 7. This figure clearly indicates that the aircraft is turning with the roll rate commanded from zero to five degrees. However, there is a discrepancy between the actual roll angle and its reference values after 6 s. Such an issue can be expected since the aircraft was experiencing some residual yaw that was induced by the motion of the aircraft. The difference between the roll angle and its reference signal in the controller with adaptive switching terms was slightly smaller than the PSO-based one. This study required a high level of roll rate tracking performance, which was successfully achieved.
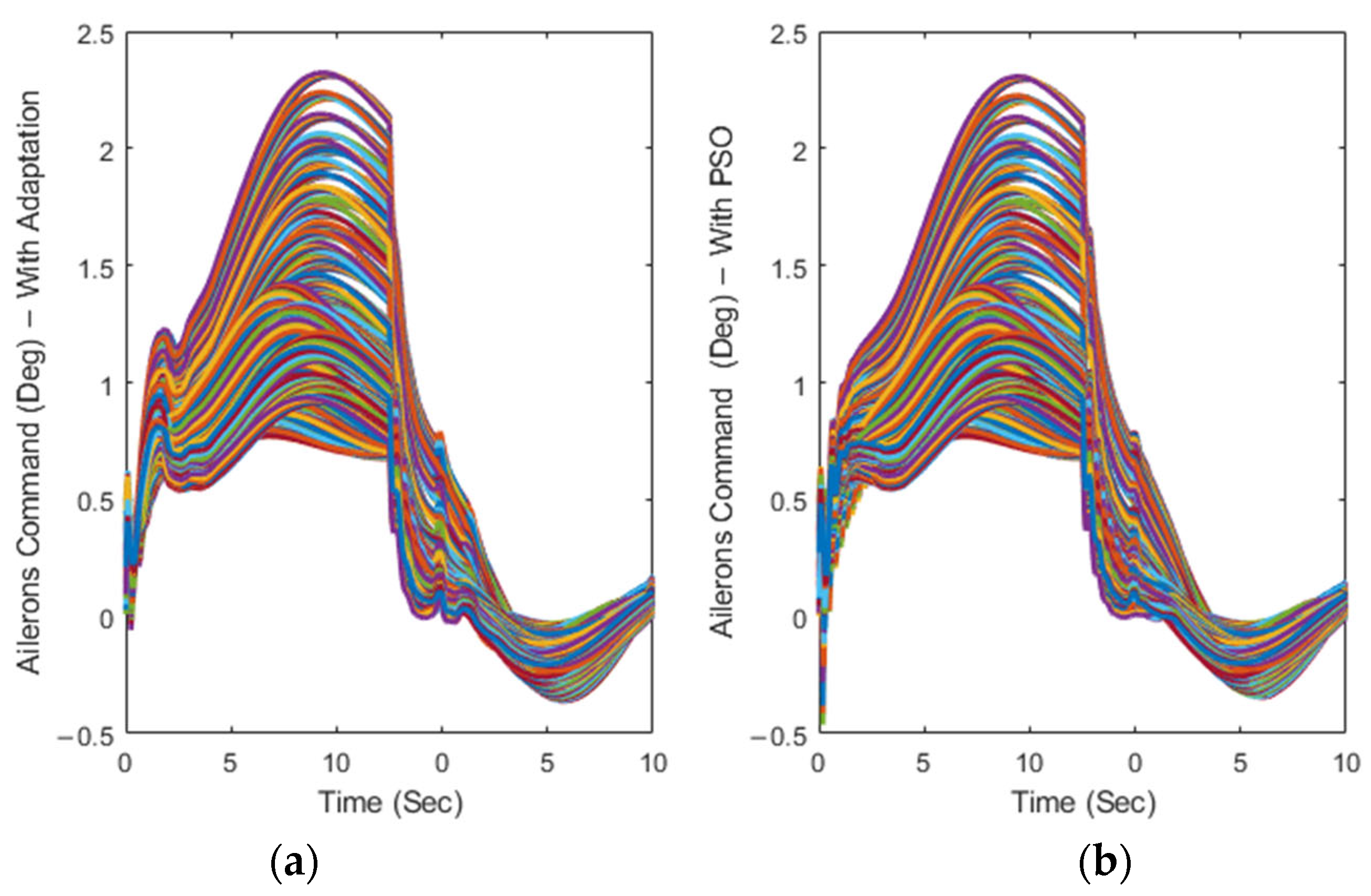
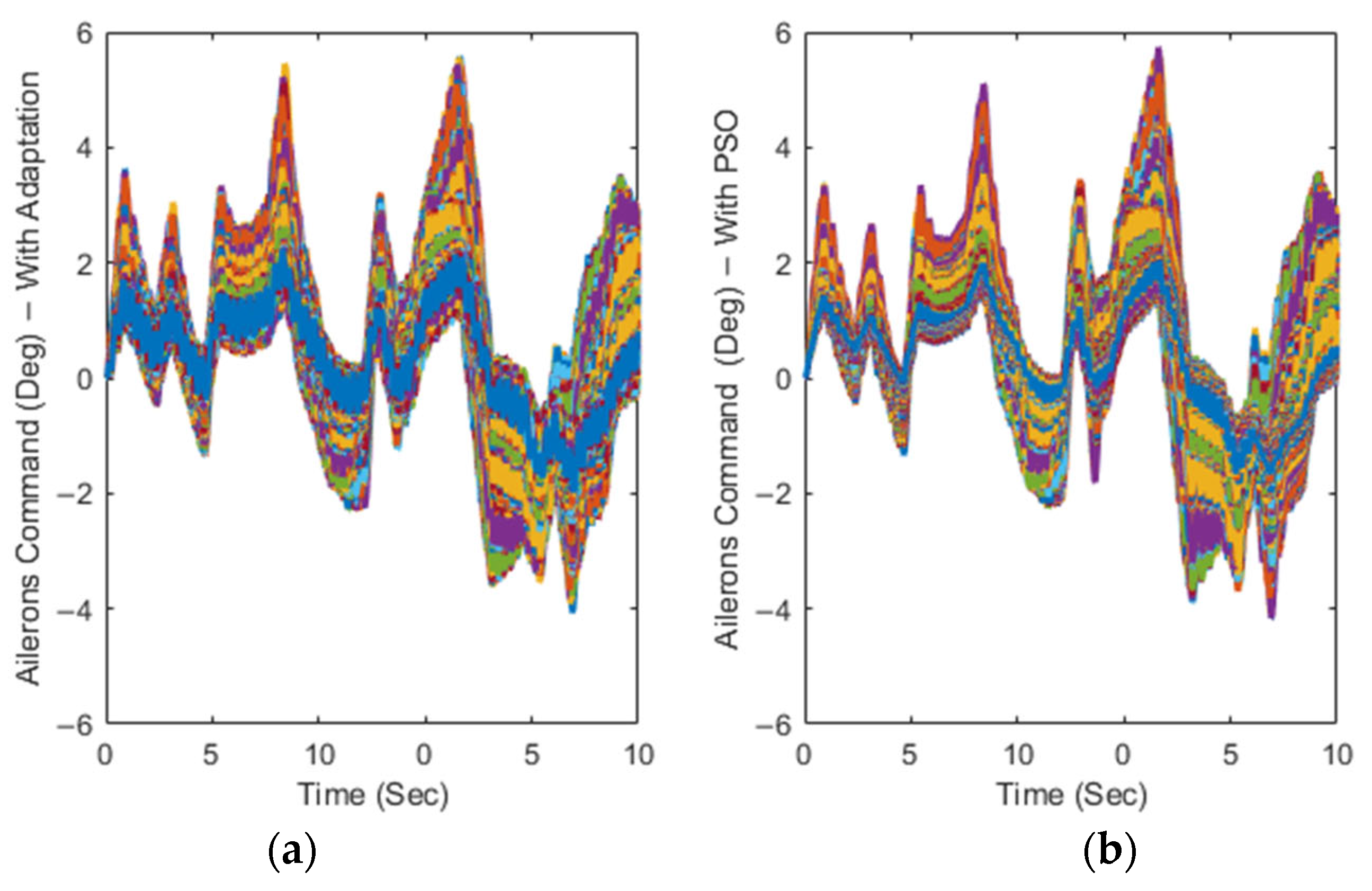
Designing a control system to generate a smooth control input signal is crucial for several reasons, primarily in terms of passenger safety and comfort and to ensure that commands will not damage the actuation system. Sudden or abrupt maneuvers could lead to structural damage to the airframe and to accelerated wear and tear. In addition, from the flight dynamics approach, smooth commands help to maintain the stability and maneuverability of an aircraft. Our goal was to design a control system that produced a control input signal for ailerons with the most negligible high-frequency oscillations. As shown in
Figure 8, both control methodologies could satisfy this criterion. However, the controller with the adaptive switching control term was smoother than the one with PSO, especially during the first seconds of the simulation, as some abrupt changes (in some flight conditions) can be seen between
to
s.
As shown in
Figure 9, to stabilize the yaw rate, we used an integral controller to reduce the steady-state error between the sideslip angle and its trim value (which usually equals zero—black dashed line). By maintaining the sideslip angle close to its trim value, it would be possible to ensure that the yaw rate is stable, as any variations in the sideslip angle can change the yaw rate.
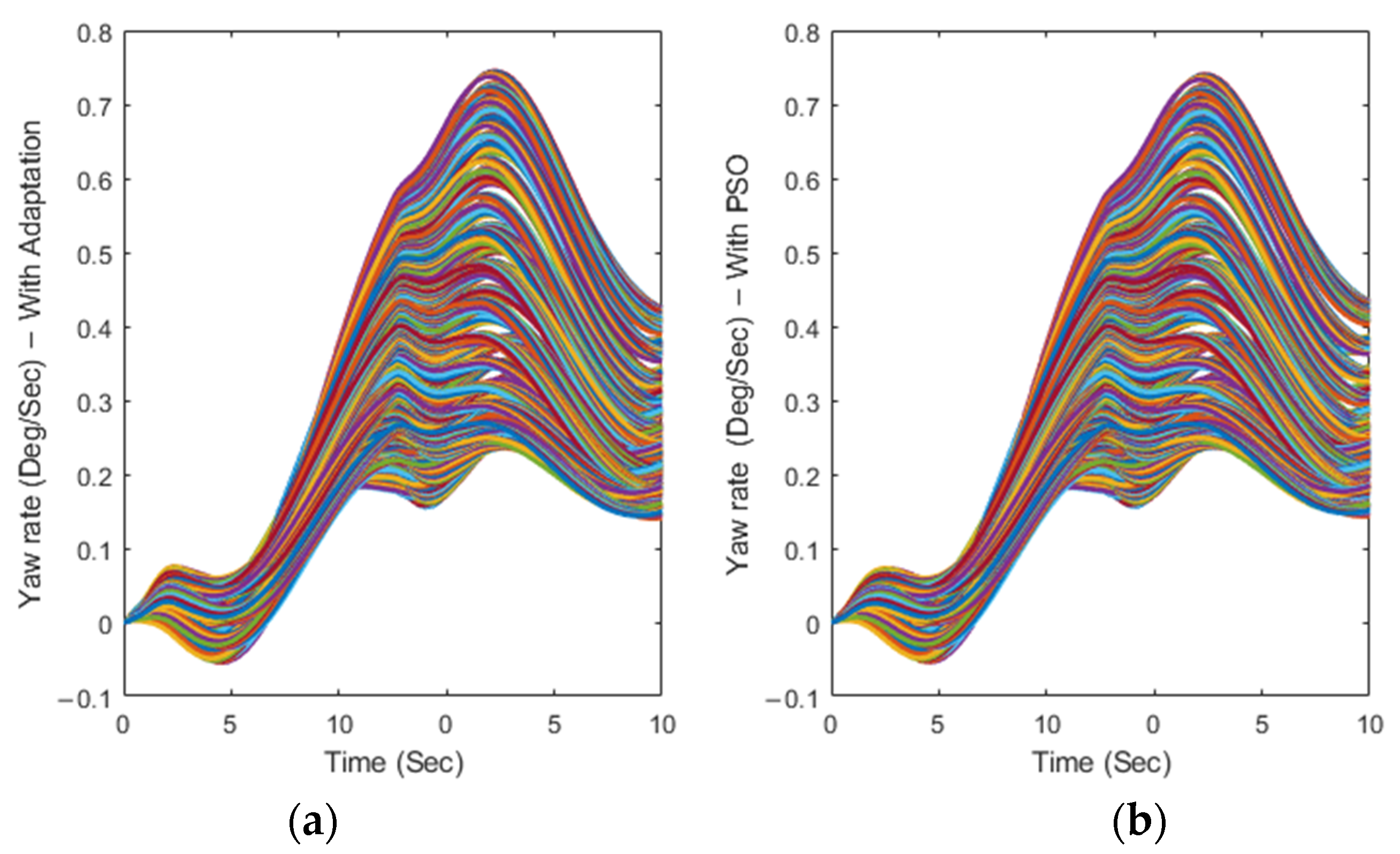
As illustrated in
Figure 10, the use of an integral feedback for the sideslip angle allowed the yaw rate variations to be maintained in a reduced range close to zero. These results validate the proposed strategy and demonstrate the effectiveness of the complete control system proposed in this paper.
One of the main objectives of this research was to design a control system for minimizing the effects of turbulence as a common critical condition during the cruise. To evaluate such systems, we used the Dryden turbulence model available in the Simulink Aerospace Blockset to obtain the effects of turbulence on the performance of Cessna Citation X aircraft equipped with the proposed T2AFSTSMC controllers. To achieve the objectives of this research, we selected the moderate probability for exceedance of high-altitude intensity (equal to
) in accordance with the specifications given in MIL-F-8785C [
50].
Earlier in this section, we analyzed the performance of control methodologies under ideal conditions, demonstrating their efficiency and reliability. However, a test of the robustness and adaptability of an aircraft control system lies in its ability to handle real-world phenomena such as turbulence while maintaining the aircraft stability. This analysis highlights the capabilities of the designed control systems and provides precious insights to ensure optimal performance under operational conditions.
As represented in
Figure 11, the tracking performance was achieved with both control system methods handling the turbulence effects with a minimum amplitude variation.
The simulation results in
Figure 11 are numerically compared with those shown in
Figure 12 at each flight condition, revealing that the MAE values varied in almost the same range using the T2AFSTSMC with an adaptive switching term and with a PSO-based switching term. The trend of these variations shows that as the altitude increased, the MAE values consistently decreased (the first flight condition had the lowest altitude (8000 ft), and the 925th flight condition had the highest altitude (45,000 ft)), indicating that the controller could operate better at higher altitudes than at lower altitudes.
While the trends of MAE variations are presented in
Figure 12, it was not obvious which method could operate better in the presence of turbulence. To investigate any possible differences, the distribution of the MAEs across all flight conditions was assessed, as shown by the histogram in
Figure 13. This evaluation showed that the controller with a PSO-based switching term operated better than the one with an adaptive term, as the MAE values for all flight conditions were less than 0.06 degrees per second. However, the maximum MAE for the controller with an adaptive switching term was very close to this value at less than 0.07 deg/s.
As shown in
Figure 14, the aircraft equipped with both switching terms attempted to achieve the commanded roll angle of 5 degrees. However, due to the erratic effects of the turbulence, the roll angle deviated from its reference roll angle, and the aircraft could not remain stable at the targeted 5 degrees. These challenging variations imposed on the maneuverability of the aircraft have occurred in both control methodologies.
As shown in
Figure 15, the produced aileron control input signals had minimum abrupt oscillations (without high amplitude) in the presence of turbulence. This characteristic was successfully achieved with both methods since the imposed effects of the turbulence forced the control system to change the position of the ailerons very rapidly within a restricted deviation range.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}