
Validating Flow-Based Arrival Management for En Route Airspace: Human-In-The-Loop Simulation Experiment with ESCAPE Light Simulator

 ,
,  , ,
, ,  , and
, and 
Abstract
1. Introduction
2. Operational Concept of En Route AMAN
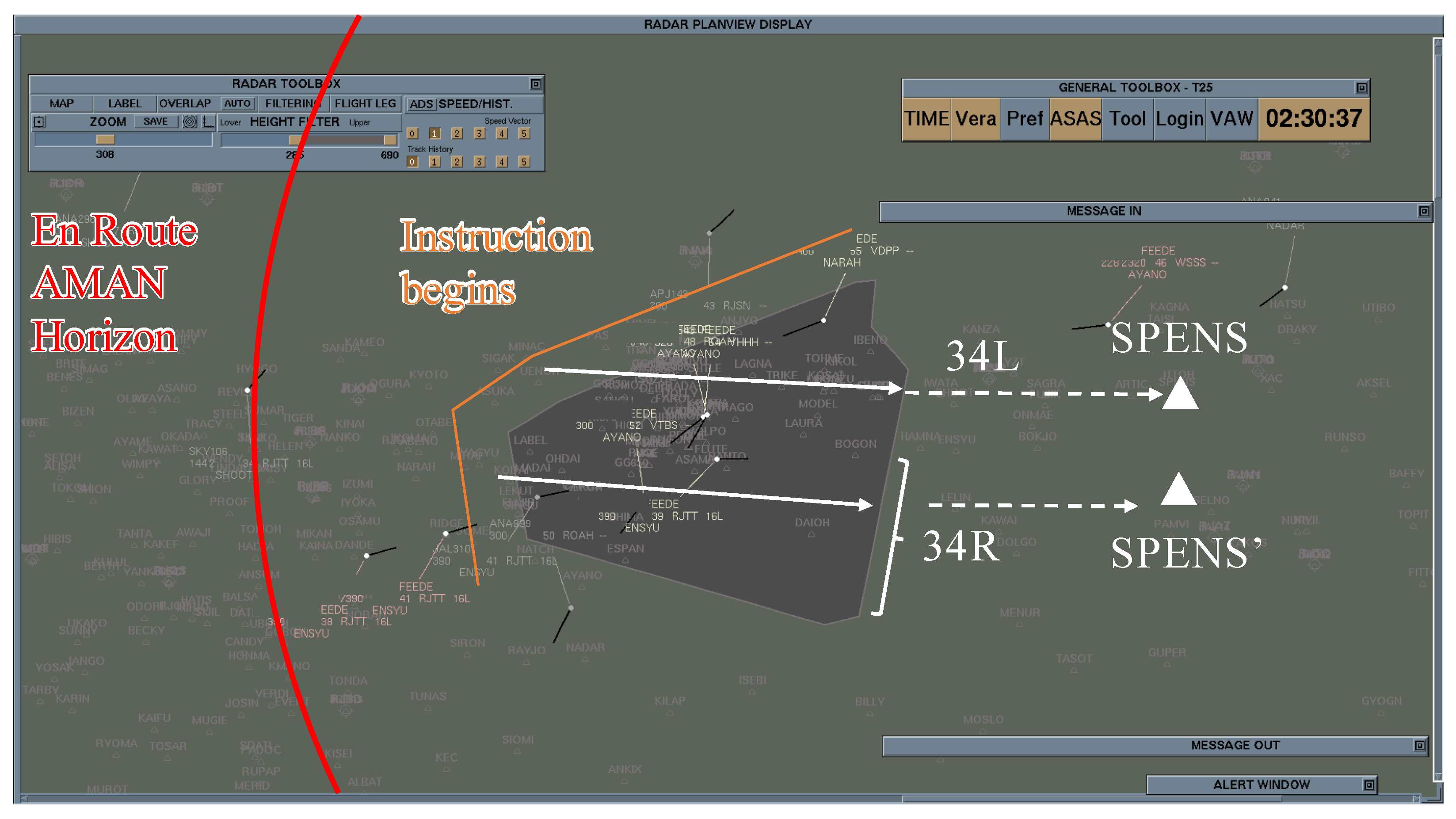
2.1. Runway Assignment
2.2. Speed Control
3. Simulation Environment
3.1. ESCAPE Light Simulator
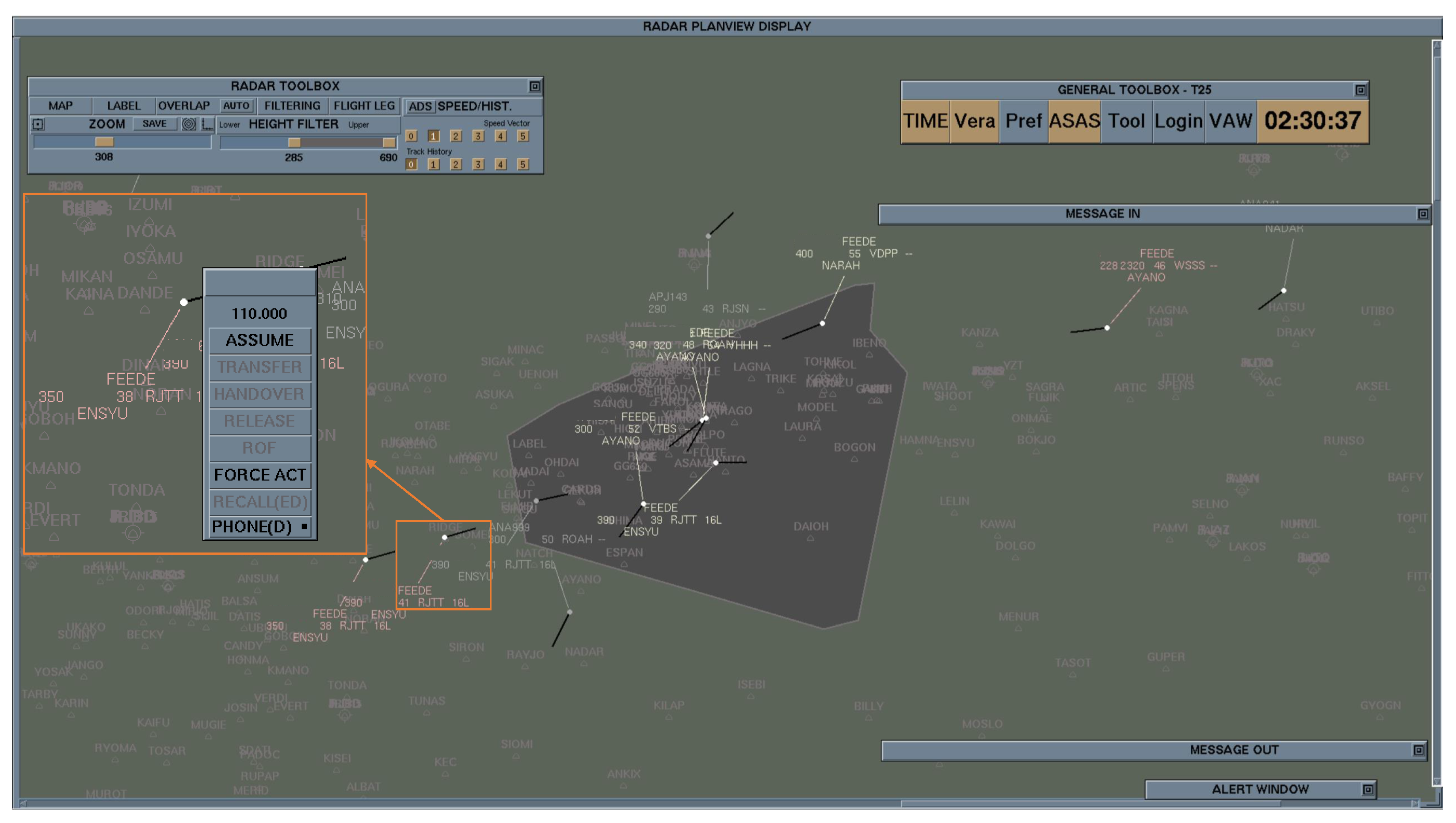
3.1.1. CWP01
3.1.2. CWP02
3.1.3. PIL01
3.2. Stand-Alone Human–Machine Interface (HMI)
- “CS” is the call sign.
- “TIME” is when the target aircraft enters the En Route AMAN horizon and will appear according to this column.
- “SPD” is the deceleration speed range with the Mach number recommended by En Route AMAN.
- “RWY” is the assigned runway recommended by En Route AMAN.
- “ETA” is the estimated arrival time at SPENS, which is the terminal gate for the traffic flow through T25.

4. Experimental Conditions
4.1. Experimental Resource
4.2. Experimental Design
4.3. Controller Operational Procedures
4.4. Measurements and Observations
5. Validation Results
5.1. PRQ and PEQ
5.2. Qualitative Feedback from ATCos
- Early identification of RWY34R usage is greatly appreciated, allowing quick sequence comprehension and smoother operations.
- Distribution to different runways significantly reduces the volume of tasks associated with having access to additional metering queues, making operations easier.
- Having a way to easily check the instructions on the Mach is a key to sequence management.
- The levels of cooperation of pilots in speed control would vary in real operations, making it difficult to issue speed control instructions with expected and conforming results.
- Lowering the speed without lowering the altitude is challenging in strong wind conditions and often requires additional adjustments.
- Constant attention to Mach and RWY34R lists is required, increasing visual load, particularly during duration periods.
- When AMAN instructions do not match real-time conditions, changing the sequence can be difficult.
- Handling the situation where the spacing is widened due to congestion and re-distributing to RWY34R requires additional training.
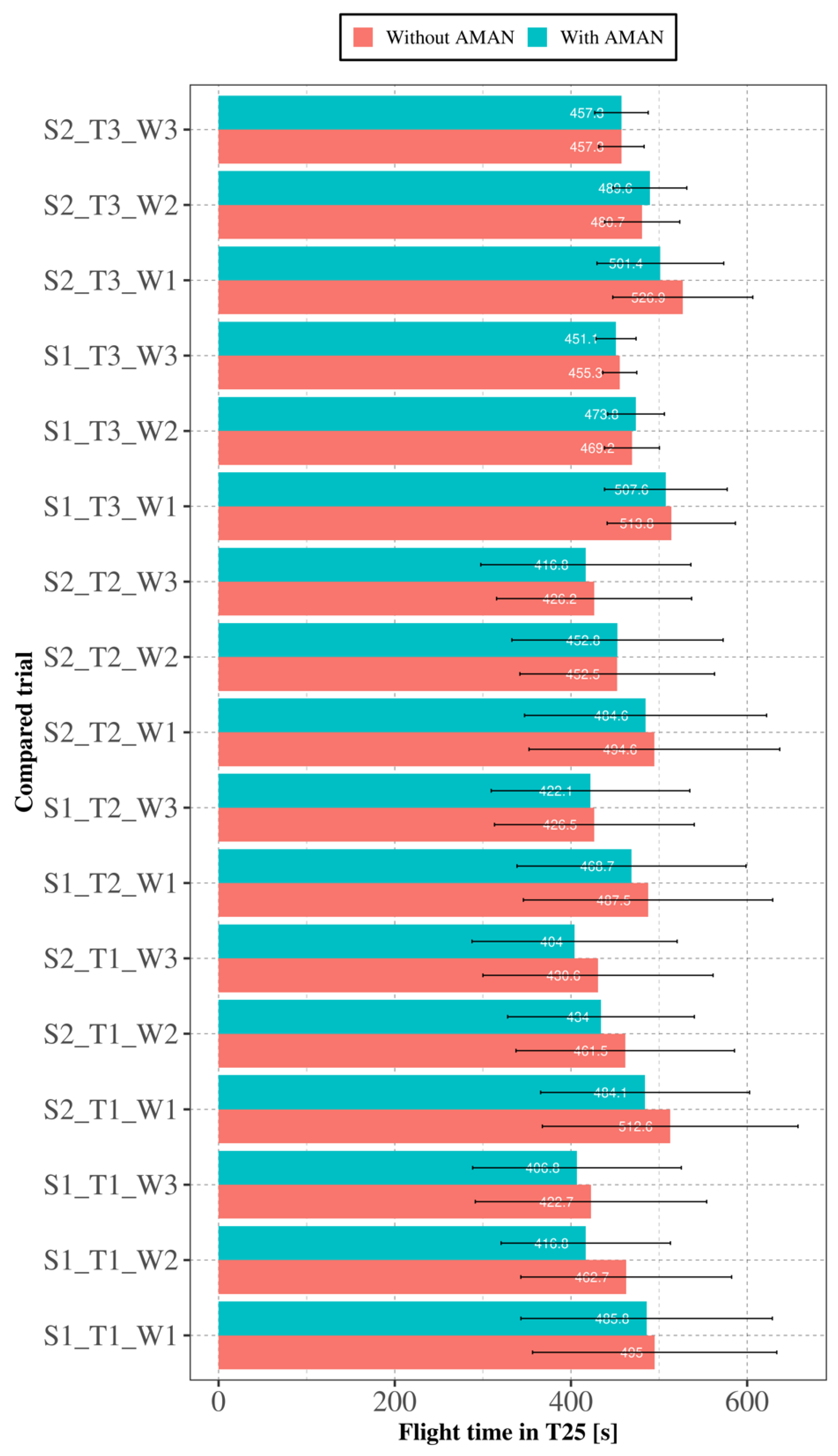
5.3. Flight Duration in T25
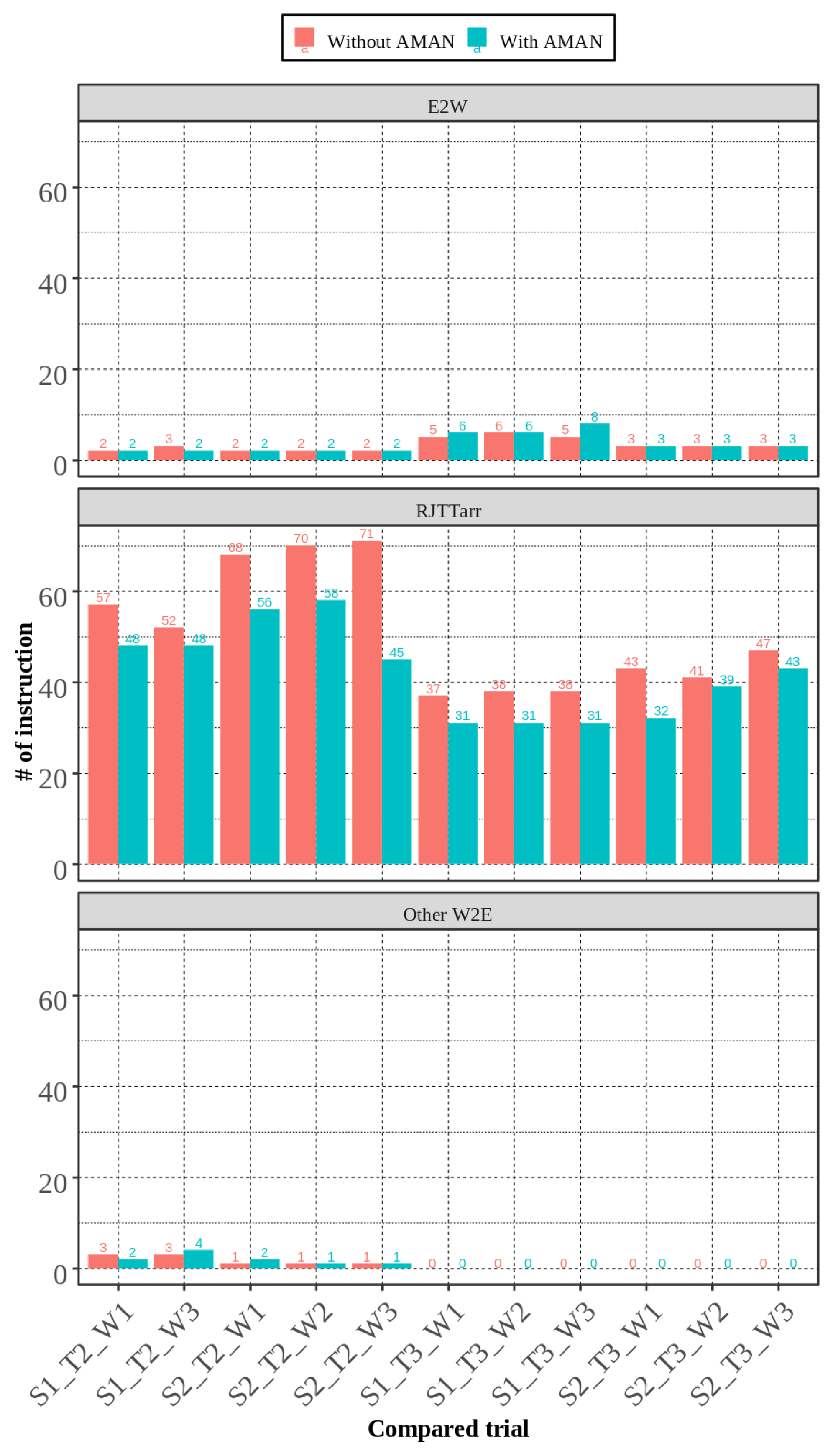
5.4. Number of Instructions
6. Discussion
6.1. Operational Enhancements in En Route AMAN: Procedures, HMI, and Coordination Strategies
6.1.1. Speed Control Procedure
6.1.2. Runway Re-Assignment Procedure
- Prioritizing the Aircraft with the Shortest Relative Separation for Runway Re-assignment: For example, within a 10 min flow, choosing the aircraft with the shortest time interval minimizes the variation in intervals between aircraft and maximizes the time adjustment effect of speed control aircraft. This strategy aligns with the concept of flow-based Arrival Management.
- Prioritizing the Aircraft with the Highest or Lowest Altitude for Runway Re-assignment: This strategy minimizes altitude-based interference, optimizing the process from a complexity management perspective.
- Prioritizing an Aircraft Approaching from the Southwest for Runway Re-assignment: This minimizes the horizontal flight distance, optimizing fuel consumption and delay for aircraft re-assigned to a different runway.
6.1.3. Human–Machine Interface (HMI)
- First Line: Flight number (Call sign)/Memo box
- Second Line: Altitude/Climb (↑) or Descent (↓)/Assigned altitude
- Third Line: Ground speed + Wake turbulence category/Destination/Remaining distance
- Fourth Line: Assigned heading/Assigned speed
6.1.4. Operational Procedures and Guidelines for Coordinating with Adjacent Sectors
6.2. Insights from HITL Simulations of En Route AMAN: ATCo Task and Delay Mitigation Perspectives
7. Concluding Remarks
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AIP | Aeronautical Information Publication |
| AMAN | Arrival MANager |
| ATCo | Air Traffic Controller |
| ATC | Air Traffic Control |
| ATFM | Air Traffic Flow Management |
| ATIS | Automatic Terminal Information Service |
| ATM | Air Traffic Management |
| BADA | Base of Aircraft DAta |
| CARATS | Collaborative Actions for Renovation of Air Traffic Systems |
| CDO | Continuous Descend Operation |
| CS | Related to Flight: Flight Callsign |
| CWP | Controller Working Position |
| DMAN | Departure MANager |
| DIR | Related to Flight: Direct To |
| EIH | EUROCONTROL Innovation Hub |
| E-OCVM | European Operational Concept Validation Methodology |
| ESCAPE | EUROCONTROL simulation capabilities and platform for experimentation |
| ETA | Estimated Time of Arrival |
| FIR | Flight Information Region |
| FL | Related to Flight: Flight Level |
| FMS | Flight Management System |
| FP | Flight Plan |
| HDG | Related to Flight: Heading |
| HITL | Human-In-The-Loop |
| HMI | Human–Machine Interface |
| IAF | Initial Approach Fix |
| ICAO | International Civil Aviation Organization |
| IP | Internet Protocol |
| IPAS | Integrated data Preparation and Analysis System |
| JCAB | Japan Civil Aviation Bureau |
| KG | Knowledge Graph |
| LoA | Letter of Agreement |
| MSMGPV | Meso-Scale Model Grid Point Value |
| OS | Operating System |
| PBN | Performance-Based Navigation |
| PC | Personal Computer |
| PCA | Principal Component Analysis |
| PEQ | Post Exercise Questionnaire |
| PRQ | Post Run Questionnaire |
| PWP or PIL | Pilot Working Position |
| QHD | Quad high definition 2560 × 1440 |
| PTOT | Possible Takeoff Time |
| RJTT | Tokyo International Airport |
| SA | Situational Awareness |
| SESAR | Single European Sky ATM Research |
| SPD | Related to Flight: Speed |
| STA | Scheduled Time of Arrival |
| SWIM | System Wide Information Management |
| TACA | Tokyo Approach Control Area |
| TMA | Terminal Maneuvering Area |
| TSS | Terminal Sequencing and Spacing |
| VM | Virtual Machine |
| VoIP | Voice over Internet Protocol |
| X-MAN | Cross-border Arrival Management |
Appendix A. Data Analysis for Simulation Scenario
Appendix A.1. Traffic Flow Analysis

Appendix A.2. Weather Condition Analysis


References
- International Air Transport Association (IATA). Global Outlook for Air Transport; International Air Transport Association (IATA): Montréal, QC, Canada, 2020. [Google Scholar]
- EUROCONTROL. Arrival Manager—Implementation Guidelines and Lessons Learned; Edition 0.1; EUROCONTROL: Brussels, Belgium, 2010; p. 14. [Google Scholar]
- EUROCONTROL; FAA. Comparison of Air Traffic Management Related Operational and Economic Performance: U.S.—Europe. Available online: https://transport.ec.europa.eu/document/download/31ad10d4-51e3-43cf-8592-edbfb69f7ff0_en?filename=2024-01-US_Europe-comparison-ANS_performance.pdf (accessed on 1 August 2024).
- Khassiba, A.; Cafieri, S.; Bastin, F.; Mongeau, M.; Gendron, B. Two-stage stochastic programming models for the extended aircraft arrival management problem with multiple pre-scheduling points. Transp. Res. Part C Emerg. Technol. 2022, 142, 103769. [Google Scholar] [CrossRef]
- Zhi Jun, L.; Alam, S.; Dhief, I.; Schultz, M. Towards a greener Extended-Arrival Manager in air traffic control: A heuristic approach for dynamic speed control using machine-learned delay prediction model. J. Air Transp. Manag. 2022, 103, 102250. [Google Scholar] [CrossRef]
- Huo, Y.; Delahaye, D.; Sbihi, M. A dynamic control method for extended arrival management using enroute speed adjustment and route change strategy. Transp. Res. Part C Emerg. Technol. 2023, 149, 104064. [Google Scholar] [CrossRef]
- Sáez, R.; Polishchuk, T.; Schmidt, C.; Hardell, H.; Smetanová, L.; Polishchuk, V.; Prats, X. Automated sequencing and merging with dynamic aircraft arrival routes and speed management for continuous descent operations. Transp. Res. Part C Emerg. Technol. 2021, 132, 103402. [Google Scholar] [CrossRef]
- Kamo, S.; Rosenow, J.; Fricke, H.; Soler, M. Robust optimization integrating aircraft trajectory and sequence under weather forecast uncertainty. Transp. Res. Part C Emerg. Technol. 2023, 152, 104187. [Google Scholar] [CrossRef]
- Temme, M.M.; Gluchshenko, O.; Nöhren, L.; Kleinert, M.; Ohneiser, O.; Muth, K.; Ehr, H.; Groß, N.; Temme, A.; Lagasio, M.; et al. Innovative Integration of Severe Weather Forecasts into an Extended Arrival Manager. Aerospace 2023, 10, 210. [Google Scholar] [CrossRef]
- Andreatta, G.; Odoni, A.R. Analysis of Market-Based Demand Management Strategies for Airports and en Route Airspace. In Operations Research in Space and Air; Springer US: Boston, MA, USA, 2003; pp. 257–278. [Google Scholar] [CrossRef]
- Itoh, E.; Mitici, M. Queue-based Modeling of the Aircraft Arrival Process at a Single Airport. Aerospace 2019, 6, 103. [Google Scholar] [CrossRef]
- Itoh, E.; Mitici, M. Evaluating the Impact of New Aircraft Separation Minima on Available Airspace Capacity and Arrival Time Delay. Aeronaut. J. 2020, 124, 447–471. [Google Scholar] [CrossRef]
- Itoh, E.; Mitici, M. Analyzing tactical control strategies for aircraft arrivals at an airport using a queuing model. J. Air Transp. Manag. 2020, 89, 101938. [Google Scholar] [CrossRef]
- Higasa, K.; Itoh, E. Controlling Aircraft Inter-Arrival Time to Reduce Arrival Traffic Delay via a Queue-Based Integer Programming Approach. Aerospace 2022, 9, 663. [Google Scholar] [CrossRef]
- Higasa, K.; Sekine, K.; Itoh, E. Effectiveness of Aircraft Inter-Arrival Control in Upstream Traffic Flow via a Combined Tandem Fluid Queue Model and Integer Programming Approach. IEEE Access 2023, 11, 15252–15270. [Google Scholar] [CrossRef]
- Sekine, K.; Kato, F.; Tatsukawa, T.; Fujii, K.; Itoh, E. Rule Design for Interpretable En Route Arrival Management via Runway-Flow and Inter-Aircraft Control. IEEE Access 2023, 11, 75093–75111. [Google Scholar] [CrossRef]
- Pang, Y.; Zhao, P.; Hu, J.; Liu, Y. Machine learning-enhanced aircraft landing scheduling under uncertainties. Transp. Res. Part C Emerg. Technol. 2024, 158, 104444. [Google Scholar] [CrossRef]
- Gerdes, I.; Schaper, M. Management of time based taxi trajectories coupling departure and surface management systems. In Proceedings of the 11th ATM Seminar, Lisbon, Portugal, 23–26 June 2015. [Google Scholar]
- Ali, H.; Delair, R.; Pham, D.T.; Alam, S.; Schultz, M. Dynamic hot spot prediction by learning spatial-temporal utilization of taxiway intersections. In Proceedings of the 2020 International Conference on Artificial Intelligence and Data Analytics for Air Transportation (AIDA-AT), Singapore, 3–4 February 2020; pp. 1–10. [Google Scholar]
- Di Mascio, P.; Cervelli, D.; Correra, A.C.; Frasacco, L.; Luciano, E.; Moretti, L. Effects of departure manager and arrival manager systems on airport capacity. J. Airpt. Manag. 2021, 15, 204–218. [Google Scholar] [CrossRef]
- Bin Jumad, A.S.; Tominaga, K.; Yi, C.X.; Duong, V.N.; Itoh, E.; Schultz, M. Flow-Centric Air Traffic Control: Human in the Loop Simulation Experiment. In Proceedings of the 2023 IEEE/AIAA 42nd Digital Avionics Systems Conference (DASC), Barcelona, Spain, 1–5 October 2023; pp. 1–8. [Google Scholar] [CrossRef]
- EUROCONTROL. European Operational Concept Validation Methodology; Version 3; EUROCONTROL: Brussels, Belgium, 2010; Volume I. [Google Scholar]
- Thipphavong, J.; Jung, J.; Swenson, H.N.; Witzberger, K.E.; Martin, L.; Lin, M.I.; Nguyen, J.; Downs, M.B.; Smith, T.A. Evaluation of the controller-managed spacing tools, flight-deck Interval management and terminal area metering capabilities for the ATM Technology Demonstration# 1. In Proceedings of the USA/Europe Air Traffic Management Research and Development Seminar (ATM Seminar), Lisbon, Portugal, 23–26 June 2013. [Google Scholar]
- Samardžić, K.; Radišić, T.; Tukarić, I.; Hermann, R.E.H. Novel Artificial Situational Awareness System is Comparable with Human Situational Awareness in the En-route Air Traffic Control Domain. Transp. Res. Procedia 2022, 64, 316–327. [Google Scholar] [CrossRef]
- Schrefl, M.; Neumayr, B.; Gruber, S.; Hartmann, M.; Tukarić, I.; Radišić, T. Creating an ATC knowledge graph in support of the artificial situational awareness system. Transp. Res. Procedia 2022, 64, 328–336. [Google Scholar] [CrossRef]
- Ahrenhold, N.; Gerdes, I.; Mühlhausen, T.; Temme, A. Validating Dynamic Sectorization for Air Traffic Control Due to Climate Sensitive Areas: Designing Effective Air Traffic Control Strategies. Aerospace 2023, 10, 405. [Google Scholar] [CrossRef]
- Robinson, J.E.; Thipphavong, J.; Johnson, W.C. Enabling performance-based navigation arrivals: Development and simulation testing of the terminal sequencing and spacing system. Air Traffic Control Q. 2015, 23, 5–27. [Google Scholar] [CrossRef]
- Ahrenhold, N.; Stasicka, I.; Abdellaoui, R.; Mühlhausen, T.; Temme, M.M. Enabling green approaches by FMS-AMAN coordination. Aerospace 2023, 10, 278. [Google Scholar] [CrossRef]
- Itoh, E.; Miyazawa, Y.; Finke, M.; Rataj, J. Macroscopic Analysis to Identify Stage boundaries in Multi-stage Arrival Management. In Air Traffic Management and Systems IV; Springer: Berlin/Heidelberg, Germany, 2021; pp. 59–76. [Google Scholar]
- Sekine, K.; Kato, F.; Kageyama, K.; Itoh, E. Data-driven simulation for evaluating the impact of lower arrival aircraft separation on available airspace and runway capacity at Tokyo International Airport. Aerospace 2021, 8, 165. [Google Scholar] [CrossRef]
- Arbuckle, D. Interval management application. In Proceedings of the ICAO Aircraft Surveillance Applications Workshop, Ulaanbaatar, Mongolia, 12–15 June 2017. [Google Scholar]
- EUROCONTROL. New Version of Escape ATC Simulator Will Facilitate Academic Research Worldwide. Available online: https://www.eurocontrol.int/news/new-version-escape-atc-simulator-will-facilitate-academic-research-worldwide (accessed on 5 August 2023).
- EUROCONTROL. EUROCONTROL Simulation Capabilities and Platform for Experimentation. Available online: https://www.eurocontrol.int/simulator/escape (accessed on 5 August 2023).
- Bouchal, A.; Had, P.; Bouchaudon, P. The Design and Implementation of Upgraded ESCAPE Light ATC Simulator Platform at the CTU in Prague. In Proceedings of the 2022 New Trends in Civil Aviation (NTCA), Prague, Czech Republic, 26–27 October 2022; pp. 103–108. [Google Scholar]
- Guleria, Y.; Tran, P.; Pham, D.T.; Alam, S.; Durand, N. A machine learning framework for predicting atc conflict resolution strategies for conformal automation. In Proceedings of the 11th SESAR Innovation Days, Virtual, 7–9 December 2021. [Google Scholar]
- EUROCONTROL. User Manual for the Base of Aircraft Data (BADA) Revision 3.15. In EEC Technical/Scientific Report No. 19/03/18-45; EUROCONTROL: Brussels, Belgium, 2019. [Google Scholar]
- ACA. ICAO Standard Phraseology. A Quick Reference Guide for Commercial Air Transport Pilots; Safety Initiative; EUROCONTROL: Brussels, Belgium, 2011. [Google Scholar]
- Antolović, D. ATC Simulator Deployment Concept at the Department of Air Transport. Master’s Thesis, Czech Technical University, Faculty of Transportation Sciences, Prague, Czech Republic, 2021. [Google Scholar]
- Japan Aeronautical Information Service Center. Aeronautical Information Publication (AIP). Available online: https://aisjapan.mlit.go.jp/ (accessed on 24 February 2022).
- Research Institute for Sustainable Humanosphere, Kyoto University. Meso-Scale Model Grid Point Value (MSMGPV). Available online: http://database.rish.kyoto-u.ac.jp/index-e.html (accessed on 22 February 2020).
- Baxley, B.T.; Swieringa, K.A.; Wilson, S.R.; Roper, R.D.; Abbott, T.S.; Hubbs, C.E.; Goess, P.; Shay, R.F. Air Traffic Management Technology Demostration-1 (ATD-1) Avionics Phase 2 Flight Test and Results. In NASA/TP–2018-219814; NASA: Washington, DC, USA, 2018. [Google Scholar]
- DSNA. XMAN: A Concept Taking Advantage of ATFCM Cross-Border Exchanges. In Proceedings of the Fifteenth Meeting of the Civil Aviation Authorities of the SAM Region (RAAC/15), Asuncion, Paraguay, 4–6 December 2017. Available online: https://www.icao.int/NACC/Documents/Meetings/2017/NACCDCA7/NACCDCA7WP20.pdf (accessed on 1 August 2024).
- Japan Civil Aviation Bureau (JCAB). Overview of Air Safety Operations (Written in Japanese). Available online: https://www.mlit.go.jp/koku/content/001743241.pdf (accessed on 15 August 2024).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Day | Time | Activity |
|---|---|---|
| Day 0 | 11:00–12:00 | Briefings and Training Session prior to the actual experiment day |
| Day 1–9 | 11:00–11:30 | Simulation run 1 (without En Route AMAN) |
| Day 1–9 | 11:30–12:00 | Simulation run 2 (with En Route AMAN) |
| Day 1–9 | 12:00–12:15 | Debriefing and ATCos feedback session for a scenario including Post-Run Questionnaire (PRQ) |
| Day 9 | 12:15–12:30 | Debriefing and ATCos feedback session for total exercises including Post-Exercise Questionnaire (PEQ) on the final experiment day only |
| Trial Number | Trial ID 1 | AMAN Support | Subject | Traffic Case | Weather Condition | NRWY 2 | NSPD 3 |
|---|---|---|---|---|---|---|---|
| 1 | N#S1_T1_W1 | No (N) | Subject 1 | TF 1 | W1 (Light) | − | − |
| 2 | N#S1_T1_W2 | N | Subject 1 | TF 1 | W2 (Average) | − | − |
| 3 | N#S1_T1_W3 | N | Subject 1 | TF 1 | W3 (Strong) | − | − |
| 4 | N#S2_T1_W1 | N | Subject 2 | TF 1 | W1 (Light) | − | − |
| 5 | N#S2_T1_W2 | N | Subject 2 | TF 1 | W2 (Average) | − | − |
| 6 | N#S2_T1_W3 | N | Subject 2 | TF 1 | W3 (Strong) | − | − |
| 7 | N#S1_T2_W1 | N | Subject 1 | TF 2 | W1 | − | − |
| 8 | N#S1_T2_W3 | N | Subject 1 | TF 2 | W3 | − | − |
| 9 | N#S2_T2_W1 | N | Subject 2 | TF 2 | W1 | − | − |
| 10 | N#S2_T2_W2 | N | Subject 2 | TF 2 | W2 | − | − |
| 11 | N#S2_T2_W3 | N | Subject 2 | TF 2 | W3 | − | − |
| 12 | N#S1_T3_W1 | N | Subject 1 | TF 3 | W1 | − | − |
| 13 | N#S1_T3_W2 | N | Subject 1 | TF 3 | W2 | − | − |
| 14 | N#S1_T3_W3 | N | Subject 1 | TF 3 | W3 | − | − |
| 15 | N#S2_T3_W1 | N | Subject 2 | TF 3 | W1 | − | − |
| 16 | N#S2_T3_W2 | N | Subject 2 | TF 3 | W2 | − | − |
| 17 | N#S2_T3_W3 | N | Subject 2 | TF 3 | W3 | − | − |
| 18 | A#S1_T1_W1 | Yes (Y) | Subject 1 | TF 1 | W1 | 3 | 7 |
| 19 | A#S1_T1_W2 | Y | Subject 1 | TF 1 | W2 | 3 | 7 |
| 20 | A#S1_T1_W3 | Y | Subject 1 | TF 1 | W3 | 3 | 7 |
| 21 | A#S2_T1_W1 | Y | Subject 2 | TF 1 | W1 | 3 | 7 |
| 22 | A#S2_T1_W2 | Y | Subject 2 | TF 1 | W2 | 3 | 7 |
| 23 | A#S2_T1_W3 | Y | Subject 2 | TF 1 | W3 | 3 | 7 |
| 24 | A#S1_T2_W1 | Y | Subject 1 | TF 2 | W1 | 2 | 5 |
| 25 | A#S1_T2_W3 | Y | Subject 1 | TF 2 | W3 | 2 | 4 |
| 26 | A#S2_T2_W1 | Y | Subject 2 | TF 2 | W1 | 2 | 5 |
| 27 | A#S2_T2_W2 | Y | Subject 2 | TF 2 | W2 | 2 | 5 |
| 28 | A#S2_T2_W3 | Y | Subject 2 | TF 2 | W3 | 2 | 4 |
| 29 | A#S1_T3_W1 | Y | Subject 1 | TF 3 | W1 | 2 | 5 |
| 30 | A#S1_T3_W2 | Y | Subject 1 | TF 3 | W2 | 1 | 4 |
| 31 | A#S1_T3_W3 | Y | Subject 1 | TF 3 | W3 | 1 | 3 |
| 32 | A#S2_T3_W1 | Y | Subject 2 | TF 3 | W1 | 2 | 5 |
| 33 | A#S2_T3_W2 | Y | Subject 2 | TF 3 | W2 | 1 | 4 |
| 34 | A#S2_T3_W3 | Y | Subject 2 | TF 3 | W3 | 1 | 3 |
| ID | Question |
|---|---|
| Q1 | I felt comfortable during the overall run. |
| Q2 | I was able to plan and organize my work according to my preferences. |
| Q3 | I was able to predict the traffic evolution depending on the traffic situation and speed control/runway assignment. |
| Q4 | I had the feeling of focusing too much on a single problem or a specific area during my work. |
| Q5 | I have the feeling that I focused too much on a single issue due to the change in speed and runway. |
| Q6 | I was provided with all the information I needed to understand the traffic situation/implications of speed control/highway assignment. |
| Q7 | The received information was timely and complete. |
| Q8 | On average, I would rate my situational awareness as… |
| Q9 | Considering the whole of the accomplished tasks, the time pressure experienced during this run was: |
| Q10 | The overall task volume in terms of attention, skill, or effort I experienced during this run was: |
| Q11 | In general, I felt comfortable in managing en route aircraft in the En Route AMAN environment. |
| Q12 | Applying En Route AMAN will not negatively affect job satisfaction levels for ATCos. |
| Q13 | The applied concept for En Route AMAN will allow a sufficient level of safety. |
| Q14 | The applied concept for En Route AMAN will allow a satisfactory personal situational awareness. |
| Q15 | The introduction of En Route AMAN does not imply additional effort or abilities. |
| Q16 | Do you see any unexpected or unwanted effects regarding the controlling speed and assigning runway for managing en route traffic? |
| Q17 | Do you see any need for change in training or human resource management to allow the application of the En Route AMAN concept en route? |
| Questions | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| Q1–Q7 and Q11–Q17 | strongly disagree | disagree | neither agree nor disagree | agree | strongly agree |
| Q8 | very bad | poor | fair | good | excellent |
| Q9–Q10 | completely demanding | demanding | neither demanding nor undemanding | undemanding | completely undemanding |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sekine, K.; Iwata, D.; Bouchaudon, P.; Tatsukawa, T.; Fujii, K.; Tominaga, K.; Itoh, E. Validating Flow-Based Arrival Management for En Route Airspace: Human-In-The-Loop Simulation Experiment with ESCAPE Light Simulator. Aerospace 2024, 11, 866. https://doi.org/10.3390/aerospace11110866
Sekine K, Iwata D, Bouchaudon P, Tatsukawa T, Fujii K, Tominaga K, Itoh E. Validating Flow-Based Arrival Management for En Route Airspace: Human-In-The-Loop Simulation Experiment with ESCAPE Light Simulator. Aerospace. 2024; 11(11):866. https://doi.org/10.3390/aerospace11110866
Chicago/Turabian StyleSekine, Katsuhiro, Daiki Iwata, Philippe Bouchaudon, Tomoaki Tatsukawa, Kozo Fujii, Koji Tominaga, and Eri Itoh. 2024. "Validating Flow-Based Arrival Management for En Route Airspace: Human-In-The-Loop Simulation Experiment with ESCAPE Light Simulator" Aerospace 11, no. 11: 866. https://doi.org/10.3390/aerospace11110866
APA StyleSekine, K., Iwata, D., Bouchaudon, P., Tatsukawa, T., Fujii, K., Tominaga, K., & Itoh, E. (2024). Validating Flow-Based Arrival Management for En Route Airspace: Human-In-The-Loop Simulation Experiment with ESCAPE Light Simulator. Aerospace, 11(11), 866. https://doi.org/10.3390/aerospace11110866