
Study of Starting Performance of a Series Hybrid Aero Propulsion System



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
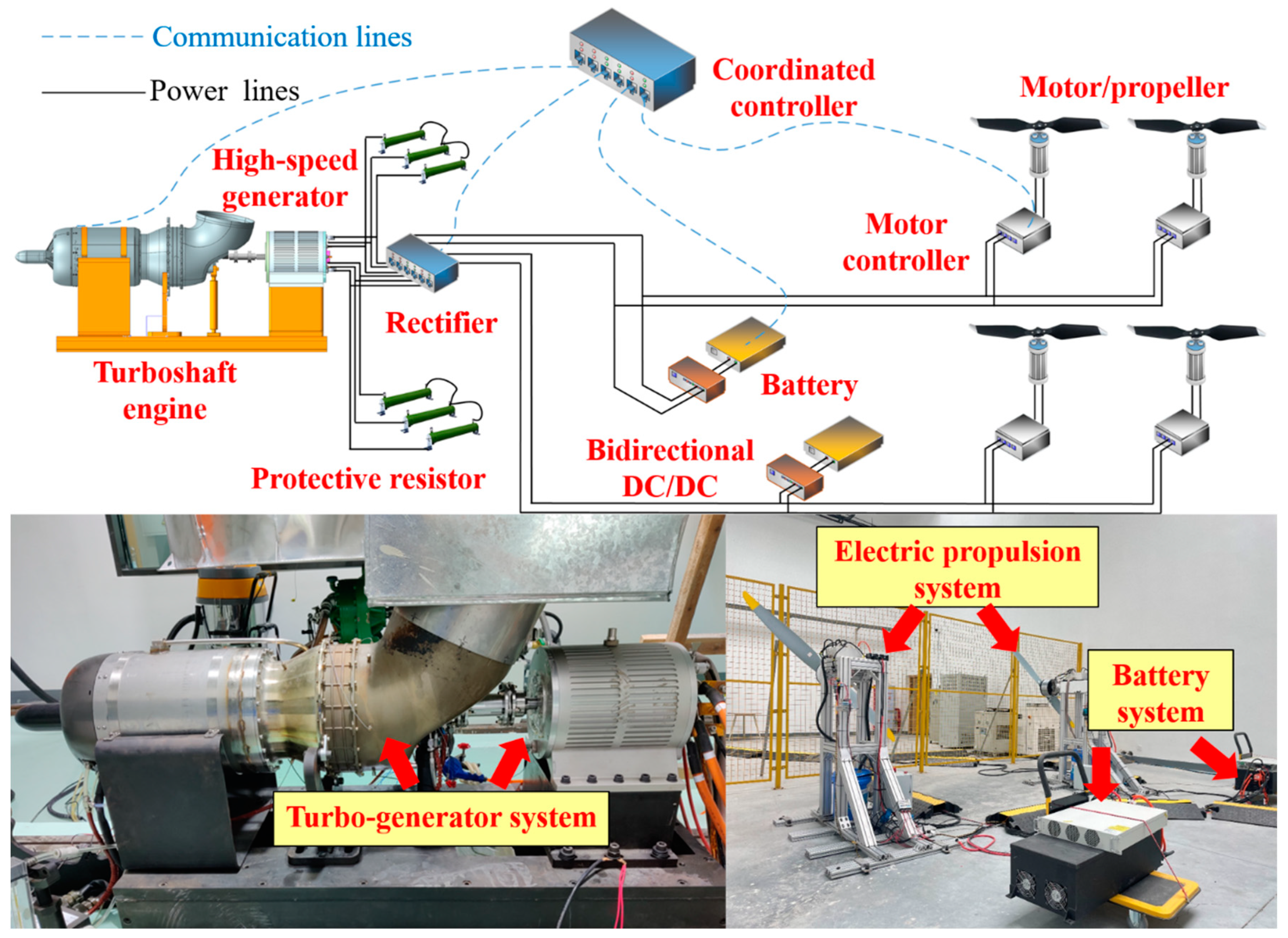
2. Experimental System and Scheme
3. Experimental Results and Discussion
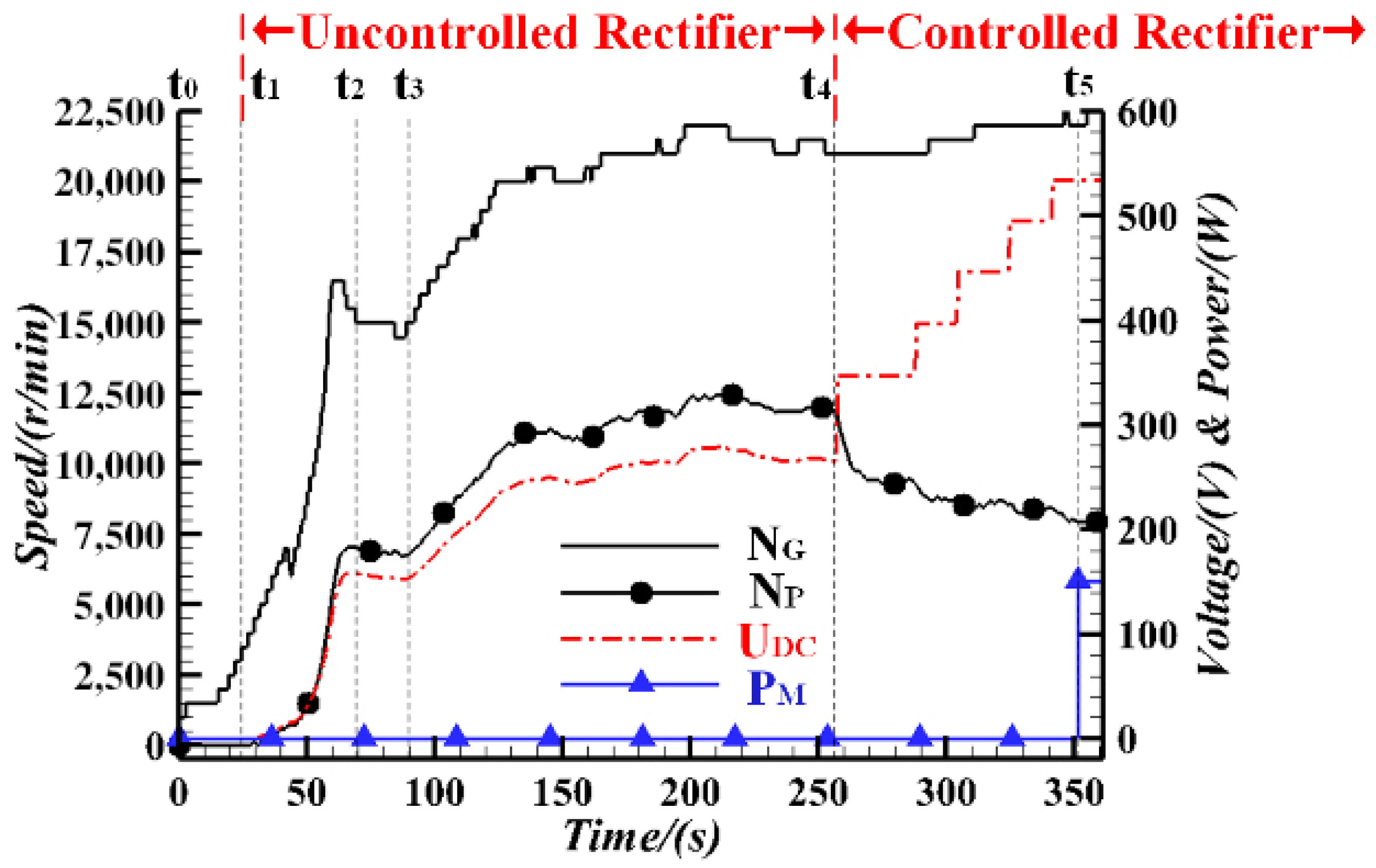
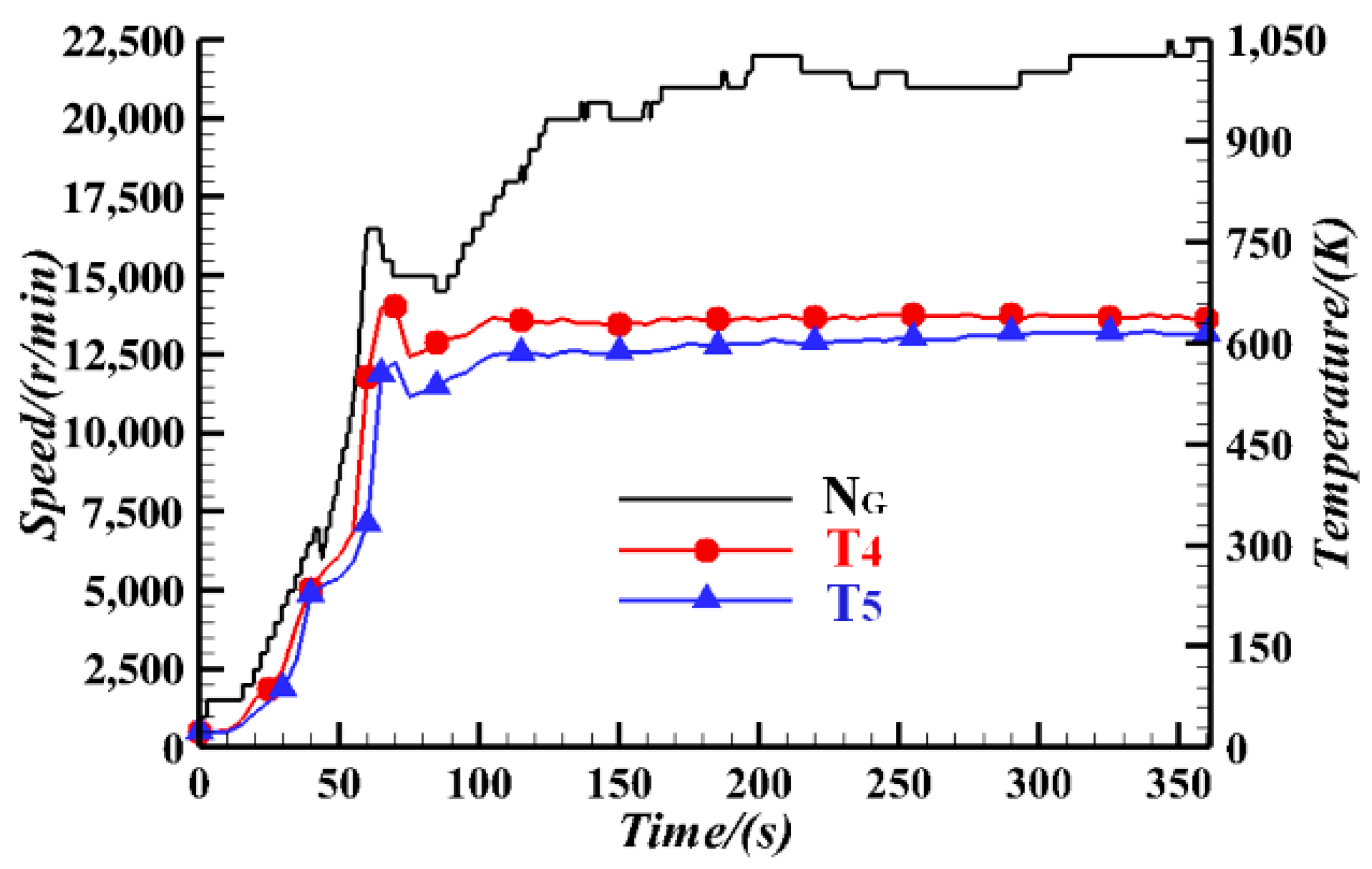
3.1. Analysis of a Typical Starting Process
- The turboshaft engine started:
- 2.
- The speed of gas turbine increased:
- 3.
- Controlled rectification intervened:
- 4.
- The electric propeller activated:
3.2. Optimization of the Starting Process
4. Conclusions
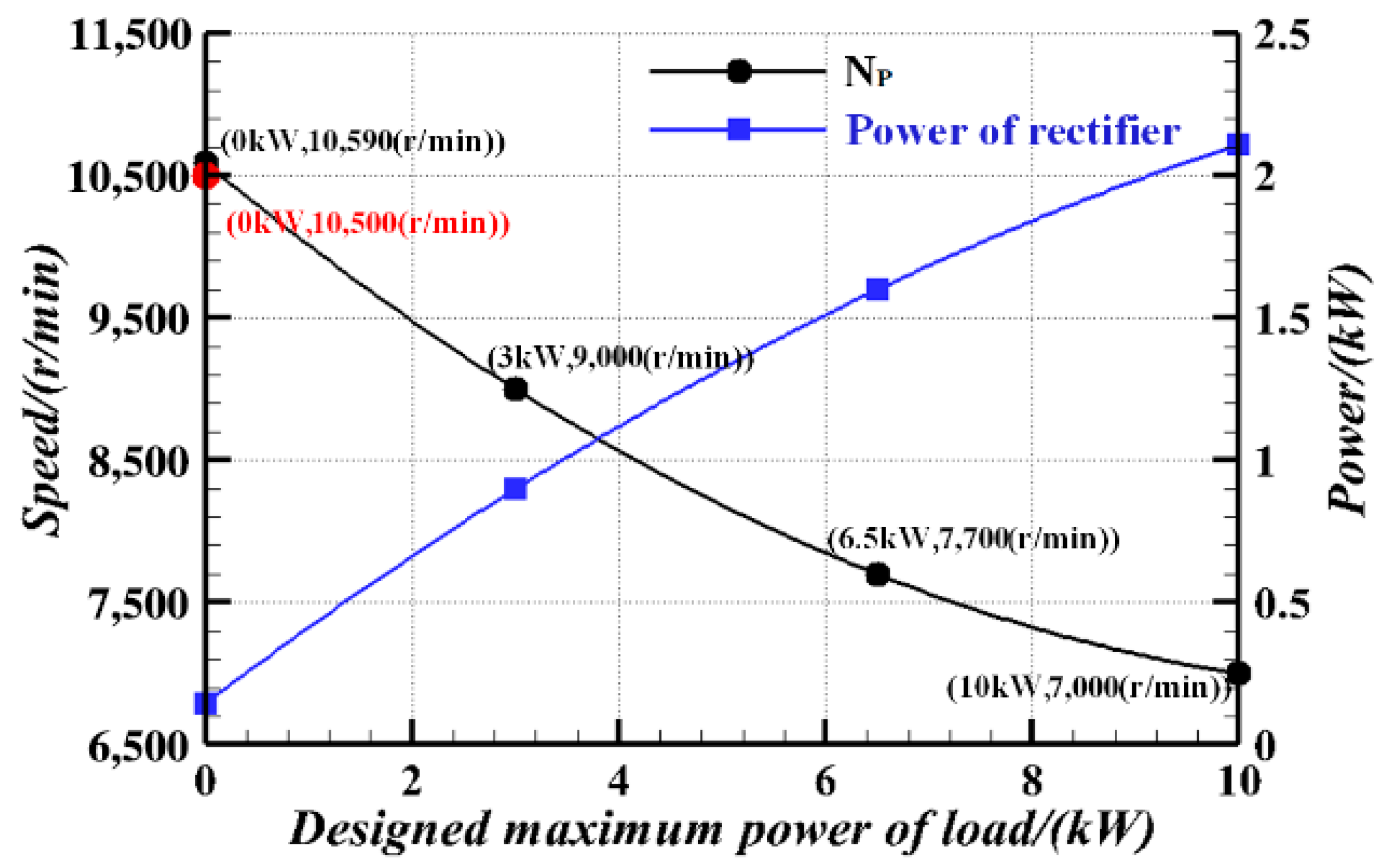
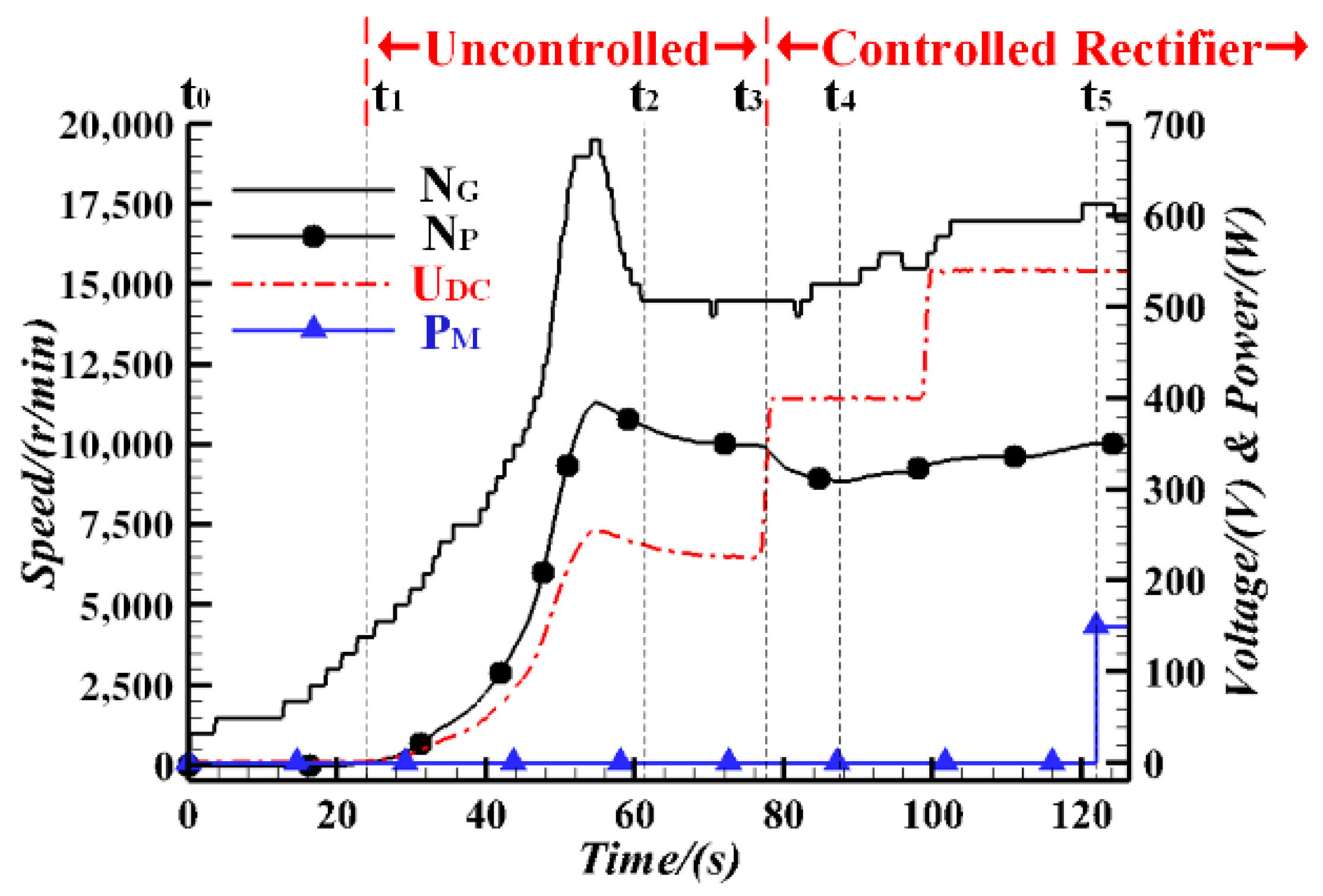
- The starting process of the series hybrid aero system mainly includes four stages: the turboshaft engine is started, the speed of the gas turbine is increased, controlled rectification intervenes, and the electric propeller is activated. The idle state should be defined with the status of the turbo-generator set (NP), the microgrid (UDC), and the electric motors (PM). For the 200 kW class hybrid propulsion system in this paper, it is suggested to set the idle parameters NP, UDC, and PM as 10,500 r/min, 540 V and 150 W, respectively.
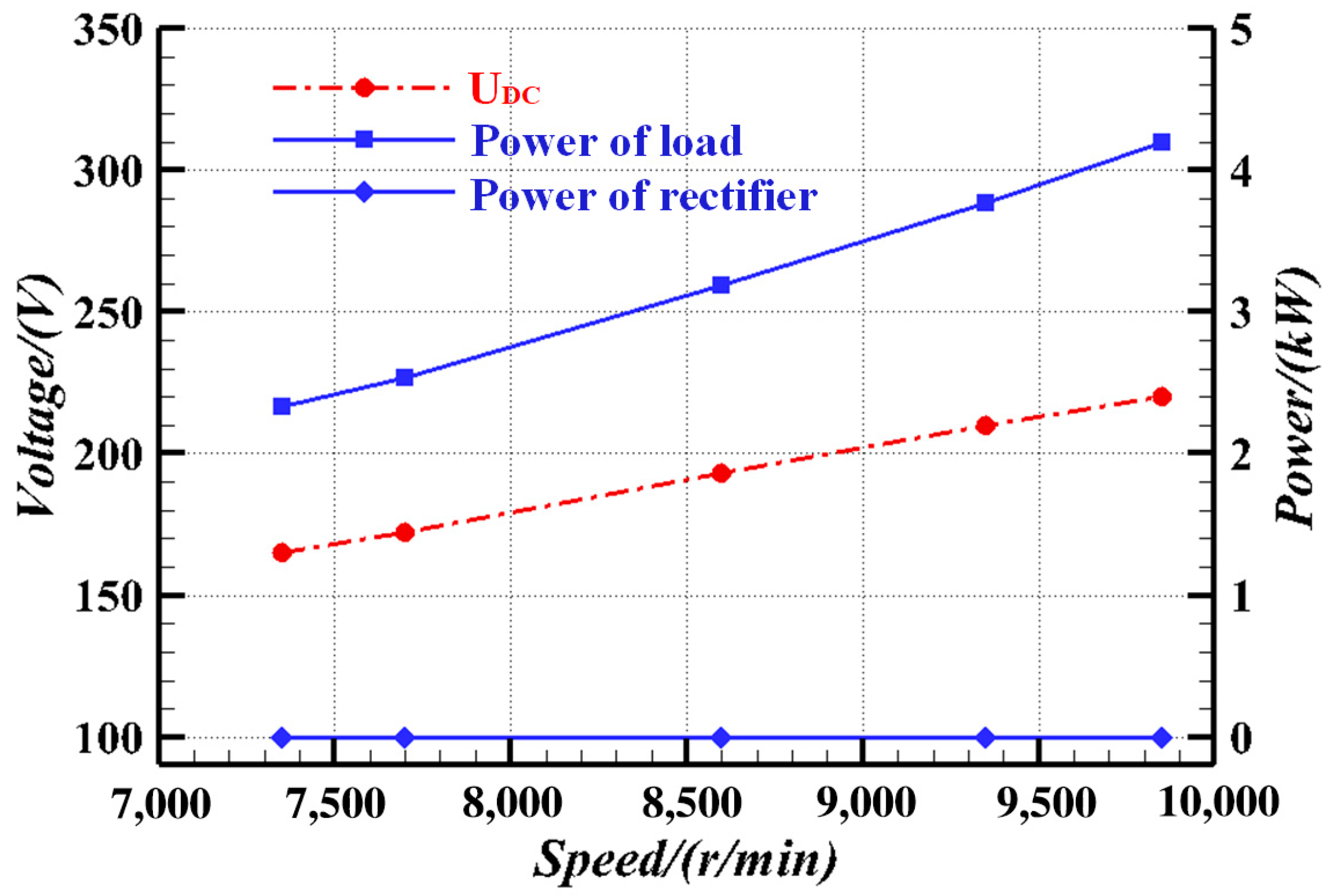
- Adding resistive loads between the generator and the rectifier could increase the equivalent rotational inertia of the turbo-generator set through the power dissipation in the resistance, thereby realizing the adjustment of the rotational speed in the idle state. In terms of some losses of the turbo-generator set itself, such as mechanical and excitation losses, there is no need to set additional resistors for overspeed protection during the starting phase of the 200 kW class hybrid system in this article.
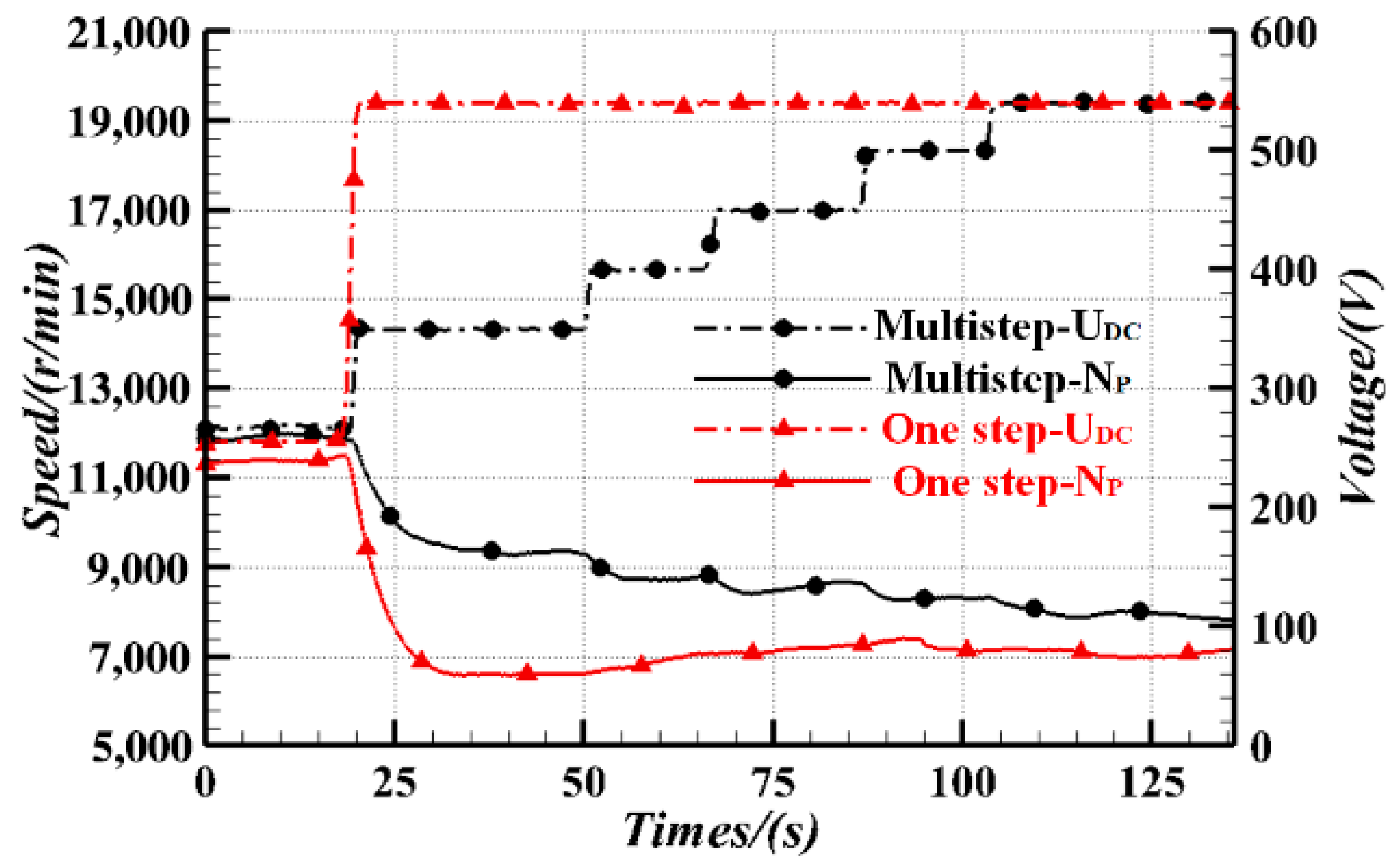
- Different strategies of controlled rectification in the DC microgrid had an impact on the dynamic characteristics of the power turbine. The one-step method caused NP to fluctuate by 16%, and the multistep method took a longer time. Using a two-step strategy with “400 V-540 V”, the decrease in NP was relatively smooth and the time required was shorter.
- Based on the optimal starting strategy of no-resistance protection and two-step rectification, the total duration of the starting process after optimization was shortened by 64.7%, NG required in the idle state of hybrid system was reduced by 22.7%, the starting sequence was faster and clearer, and the optimum effects were significant.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Smruti, S.; Zhao, X.; Konstantinos, K. A review of concepts, benefits, and challenges for future electrical propulsion-based aircraft. Aerospace 2020, 7, 44. [Google Scholar]
- Vijesh, M.; Andrew, K.J.; Susan, L. Systems integration framework for hybrid-electric commuter and regional aircraft. Aerospace 2023, 10, 533. [Google Scholar]
- De Vries, R.; Brown, M.; Vos, R. Preliminary sizing method for hybrid-electric distributed-propulsion aircraft. J. Aircr. 2019, 56, 2172–2188. [Google Scholar] [CrossRef]
- Lents, C.E.; Hardin, L.W.; Rheaume, J.; Kohlman, L. Parallel hybrid gas-electric geared turbofan engine conceptual design and benefits analysis. In Proceedings of the 52nd AIAA/SAE/ASEE Joint Propulsion Conference, Washington, DC, USA, 13–17 June 2016; p. 4610. [Google Scholar]
- IATA. Aircraft Technology Roadmap to 2050; IATA: Montreal, QC, Canada, 2019. [Google Scholar]
- Kim, H.D.; Felder, J.L.; Tong, M.T.; Berton, J.J.; Haller, W.J. Turboelectric distributed propulsion benefits on the N3-X vehicle. Aircr. Eng. Aerosp. Technol. Int. J. 2014, 86, 558–561. [Google Scholar] [CrossRef]
- Welstead, J.; Felder, J.; Guynn, M.; Haller, B.; Tong, M.; Jones, S.; Ordaz, I.; Quinlan, J.; Mason, B. Overview of the NASA STARC-ABL (Rev. B) advanced concept. In Proceedings of the Boeing NASA Electric Aircraft Workshop, Washington, DC, USA, 22 March 2017. [Google Scholar]
- Schiltgen, B.T.; Freeman, J. Aeropropulsive interaction and thermal system integration within the ECO-150: A turboelectric distributed propulsion airliner with conventional electric machines. In Proceedings of the 16th AIAA Aviation Technology, Integration, and Operations Conference, Washington, DC, USA, 13–17 June 2016; p. 4064. [Google Scholar]
- Papathakis, K.V.; Kloesel, K.J.; Lin, Y.; Clarke, S.; Ediger, J.J.; Ginn, S. Design and development of a 200-kw turbo-electric distributed propulsion testbed. In Proceedings of the 52nd AIAA/SAE/ASEE Joint Propulsion Conference, Salt Lake City, UT, USA, 25–27 July 2016; p. 4611. [Google Scholar]
- Dyson, R.W. NASA Electric Aircraft Testbed (NEAT) single-aisle transport air vehicle hybrid electric tail-cone thruster powertrain configuration and test results. In Proceedings of the AIAA/IEEE Electric Aircraft Technologies Symposium, Cincinnati, OH, USA, 9–11 July 2018; p. 5004. [Google Scholar]
- European Commission. Flightpath 2050: Europe’s vision for aviation-report of the high level group on aviation research. In Report of the High Level Group on Aviation Research; European Commission: Luxembourg, 2011. [Google Scholar]
- Whurr, J.; Hart, J. A Rolls-Royce perspective on concepts and technologies for future green propulsion systems. Green Aviat. 2016, 1, 95. [Google Scholar]
- Anton, D.F. eAircraft: Hybrid-Elektrische Antriebe für Luftfahrzeuge, 14th ed.; Tag der Deutschen Luft-und Raumfahrtregionen: Potsdam, Germany; Siemens AG: Berlin, Germany, 2019. [Google Scholar]
- Dan, T. EcoPulse leads charge to hybrid power: French partners outline ambitious plans for distributed propulsion system as next step towards more-electric aircraft. In Flight International; Reed Business Information: New York, NY, USA, 2019. [Google Scholar]
- Wang, L.; Gao, H.; Wang, P. The development of hybrid electric propulsion technology in Russia. Aerosp. Power 2019, 6, 40–44. [Google Scholar]
- Mei, Q.; Jin, H.; Shen, Y. Design and integrated verification of fuel-electric hybrid power system. Aerosp. Power 2021, 1, 39–42. [Google Scholar]
- Vimala, N.; Kishore, P.D. Review–sub-idle performance of aero gas turbine engine. In Proceedings of the ASME 2017 Gas Turbine India Conference, Bangalore, India, 7–8 December 2017; p. 4609. [Google Scholar]
- Golovanov, D.; Gerada, D.; Sala, G.; Degano, M.; Trentin, A.; Connor, P.H.; Xu, Z.; La Rocca, A.; Galassini, A.; Tarisciotti, L.; et al. 4-MW class high-power-density generator for future hybrid-electric aircraft. IEEE Trans. Transp. Electrif. 2021, 7, 2952–2964. [Google Scholar] [CrossRef]
- Cotton, I.; Nelms, A.; Husband, M. Higher voltage aircraft power systems. IEEE Aerosp. Electron. Syst. Mag. 2008, 23, 25–32. [Google Scholar] [CrossRef]
- Perullo, C.; Trawick, D.; Armstrong, M.; Tai, J.C.M.; Mavris, D.N. Cycle selection and sizing of a single-aisle transport with the Electrically Variable Engine (EVE) for fleet level fuel optimization. In Proceedings of the 55th AIAA Aerospace Sciences Meeting, Grapevine, TX, USA, 9–13 January 2017; p. 1923. [Google Scholar]
- Eryilmaz, I.; Pachidis, V. Turbine thermomechanical modelling during excessive axial movement and overspeed. Aeronaut. J. 2019, 260, 248–264. [Google Scholar] [CrossRef]
- Hao, B.; Qu, T.; Jing, Y. Modeling of aero-engine starting process based on rising rate of rotating speed. In Proceedings of the 33rd Chinese Control and Decision Conference (CCDC), Kunming, China, 22–24 May 2021; pp. 7011–7015. [Google Scholar]
- Eryilmaz, I.; Pachidis, V. A design approach for controlled blade-off in overspeeding turbines. Eng. Fail. Anal. 2022, 138, 106323. [Google Scholar] [CrossRef]
- Loder, D.C.; Bollman, A.; Armstrong, M.J. Turbo-electric distributed aircraft propulsion: Microgrid architecture and evaluation for ECO-150. In Proceedings of the 2018 IEEE Transportation Electrification Conference and Expo, Long Beach, CA, USA, 13–15 June 2018; pp. 550–557. [Google Scholar]
- Lei, T.; Kong, D.; Wang, R.; Li, W.; Zhang, X. Evaluation and optimization method for power systems of distributed electric propulsion aircraft. Acta Aeronaut. Asronautica Sin. 2021, 42, 624047. [Google Scholar]
- Guddanti, B.; Choi, J.; Illindala, M.S.; Roychowdhury, R. Effect of endogenous failure events on the survivability of turboelectric distributed propulsion system. IEEE Trans. Ind. Appl. 2022, 58, 224–232. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, J. Power Electronics, 5th ed.; China Mechine Press: Beijing, China, 2009; pp. 101–126. [Google Scholar]
- Brombach, J.; Lücken, A.; Nya, B.; Johannsen, M.; Schulz, D. Comparison of different electrical HVDC-architectures for aircraft application. In Proceedings of the Electrical Systems for Aircraft, Railway and Ship Propulsion (ESARS), Bologna, Italy, 16–18 October 2012; pp. 1–6. [Google Scholar]
- Sadey, D.J.; Taylor, L.; Beach, R. Proposal and development of a high voltage variable frequency alternating current power system for hybrid electric aircraft. In Proceedings of the 14th International Energy Conversion Engineering Conference, Salt Lake City, UT, USA, 25–27 July 2016; p. 4928. [Google Scholar]
- Jansen, R.; Bowman, C.; Jankovsky, A. Sizing power components of an electrically driven tail cone thruster and a range extender. In Proceedings of the 16th AIAA Aviation Technology, Integration, and Operations Conference, Washington, DC, USA, 13–17 June 2016; p. 3766. [Google Scholar]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, J.; Huang, G.; Xu, M.; Liu, M.; Diao, B.; Li, P. Study of Starting Performance of a Series Hybrid Aero Propulsion System. Aerospace 2024, 11, 63. https://doi.org/10.3390/aerospace11010063
Zhu J, Huang G, Xu M, Liu M, Diao B, Li P. Study of Starting Performance of a Series Hybrid Aero Propulsion System. Aerospace. 2024; 11(1):63. https://doi.org/10.3390/aerospace11010063
Chicago/Turabian StyleZhu, Jianfeng, Guochen Huang, Maoguang Xu, Ming Liu, Bo Diao, and Po Li. 2024. "Study of Starting Performance of a Series Hybrid Aero Propulsion System" Aerospace 11, no. 1: 63. https://doi.org/10.3390/aerospace11010063
APA StyleZhu, J., Huang, G., Xu, M., Liu, M., Diao, B., & Li, P. (2024). Study of Starting Performance of a Series Hybrid Aero Propulsion System. Aerospace, 11(1), 63. https://doi.org/10.3390/aerospace11010063