
Variable-Geometry Rotating Components Modeling Based on Reference Characteristic Curves for the Variable Cycle Engine


Abstract
1. Introduction
2. Neural Network Offset Coefficient Estimation Model
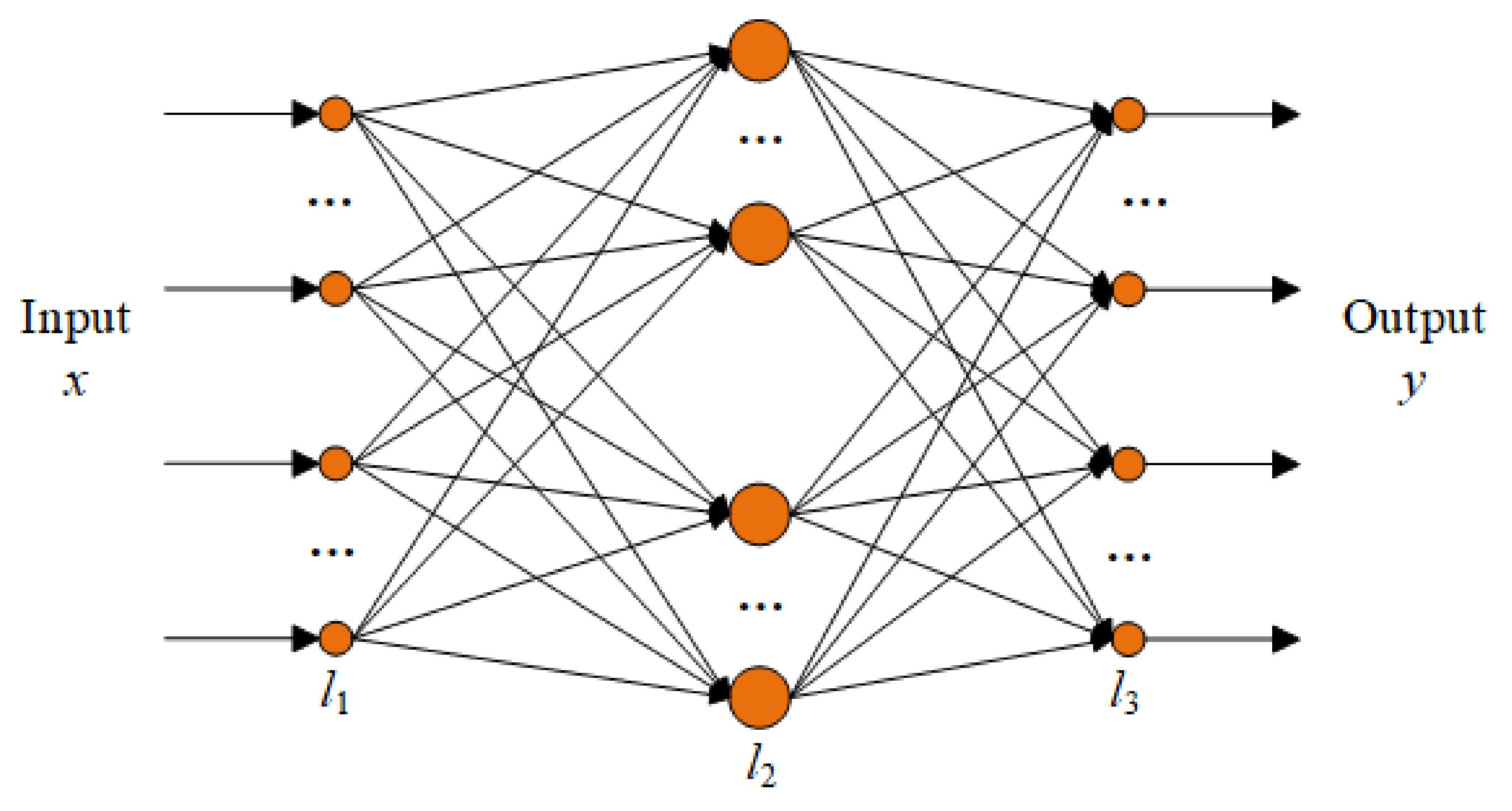
2.1. BP Neural Network
2.2. Training and Testing of Neural Network Offset Coefficient Estimation Model
3. Generation of Characteristic Maps Based on Bezier Curve Optimization
3.1. Bezier Curve
3.2. Construction of Bezier Curve Optimization Problem
3.3. Method Verification
4. Simulation and Analysis
5. Conclusions
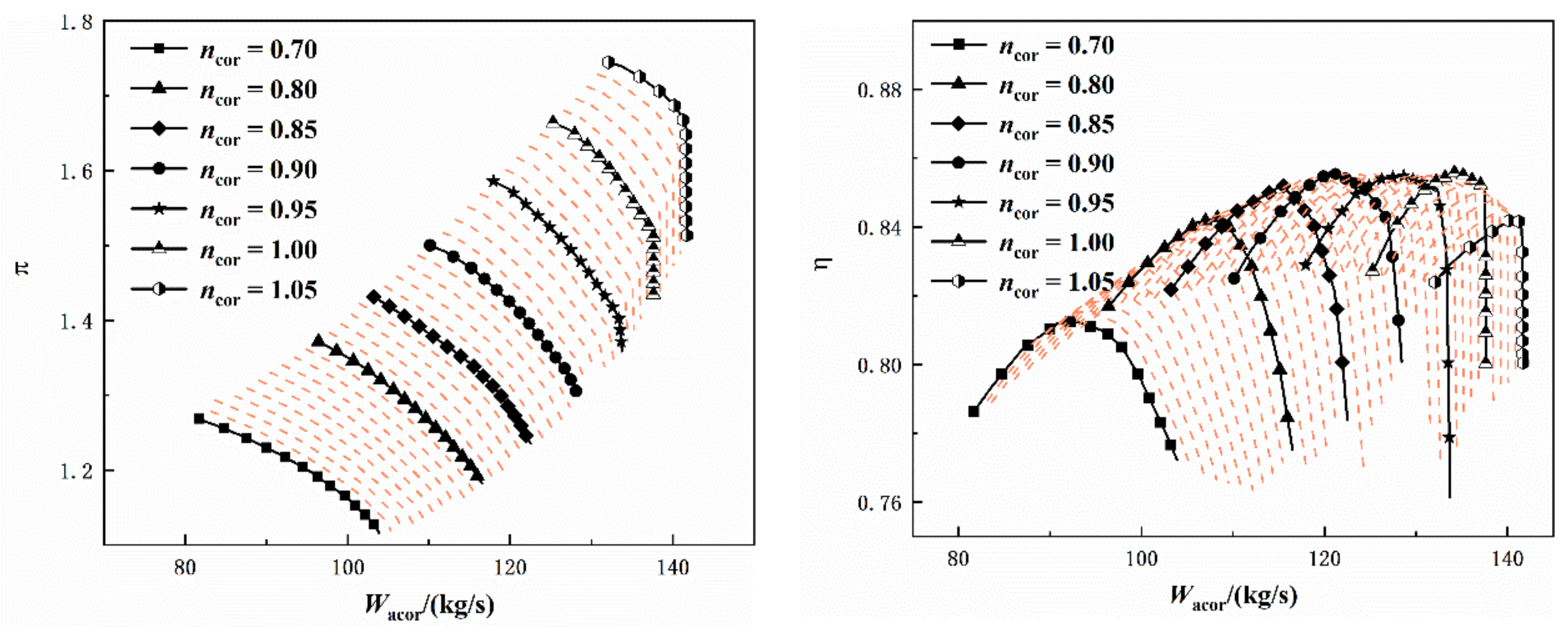
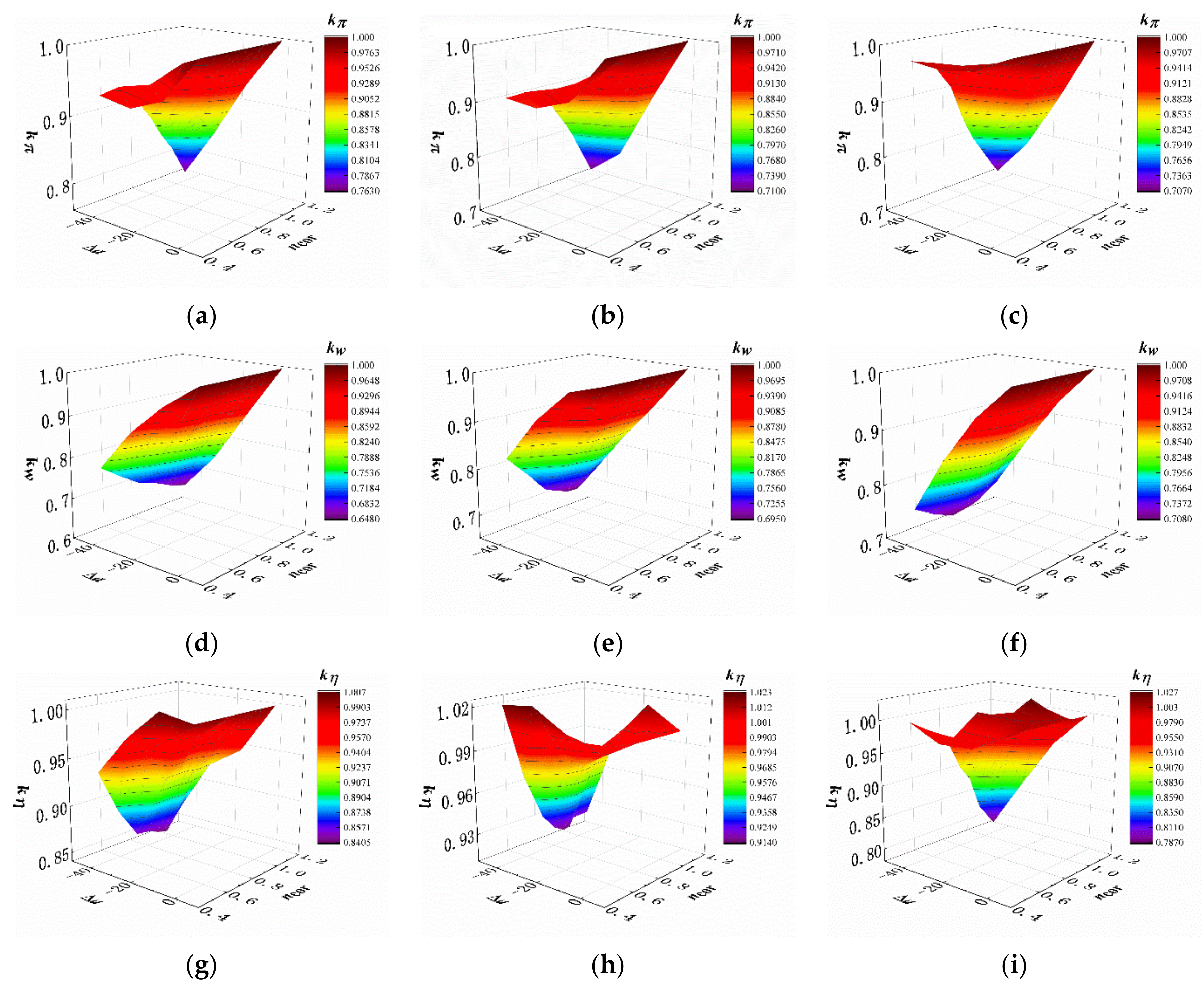
- BP neural network is adopted to learn the deviation law of operating points in the maturely designed characteristics, which is transferred to the characteristics to be designed so as to generate the desired characteristics quickly and accurately in the absence of rig test data. Simulations show that the offset coefficient estimation model based on the BP neural network has a certain accuracy, and compared with the existing method of modifying the variable-geometry components’ characteristics by the same correction factor, this method is more in line with the actual characteristics;
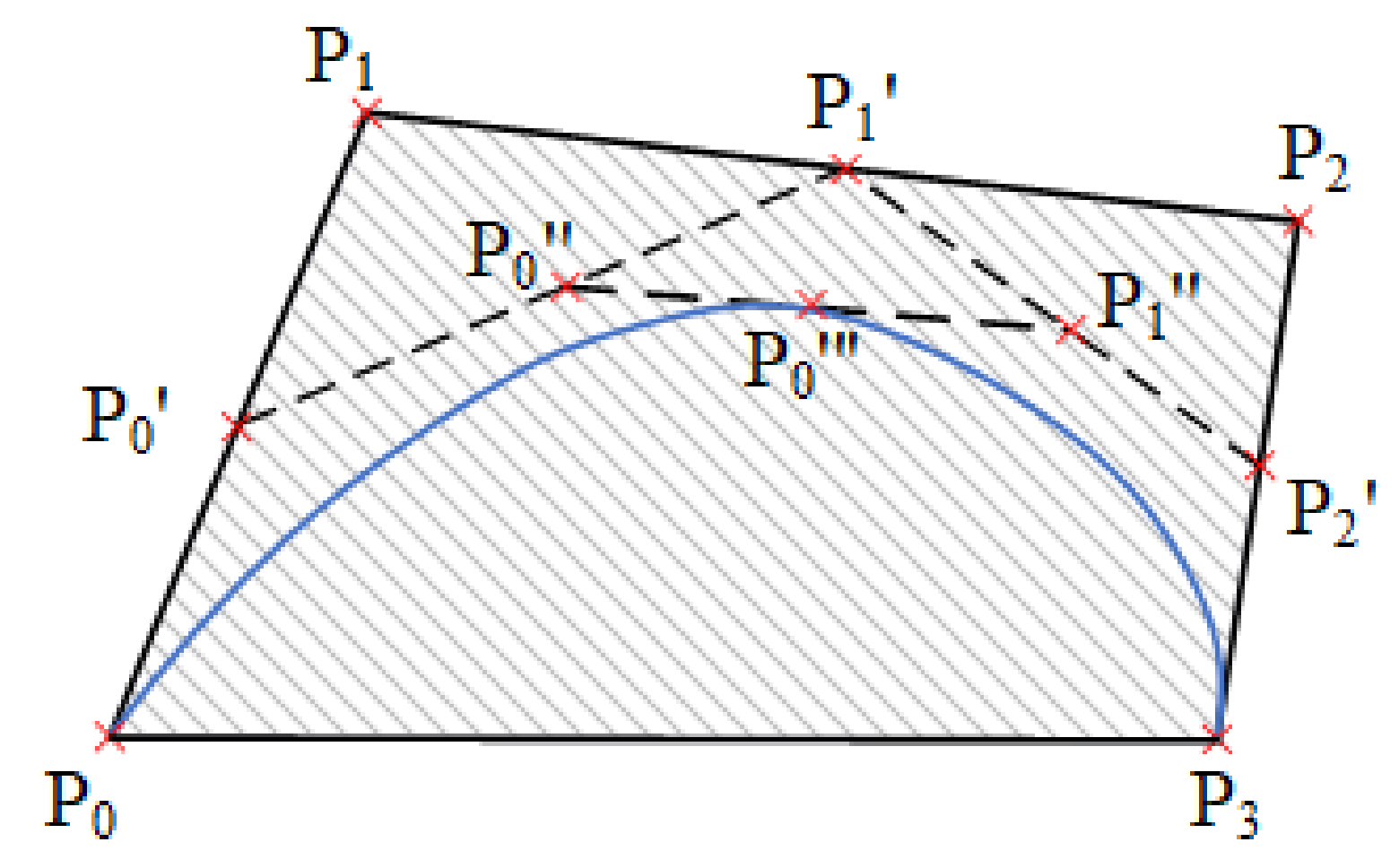
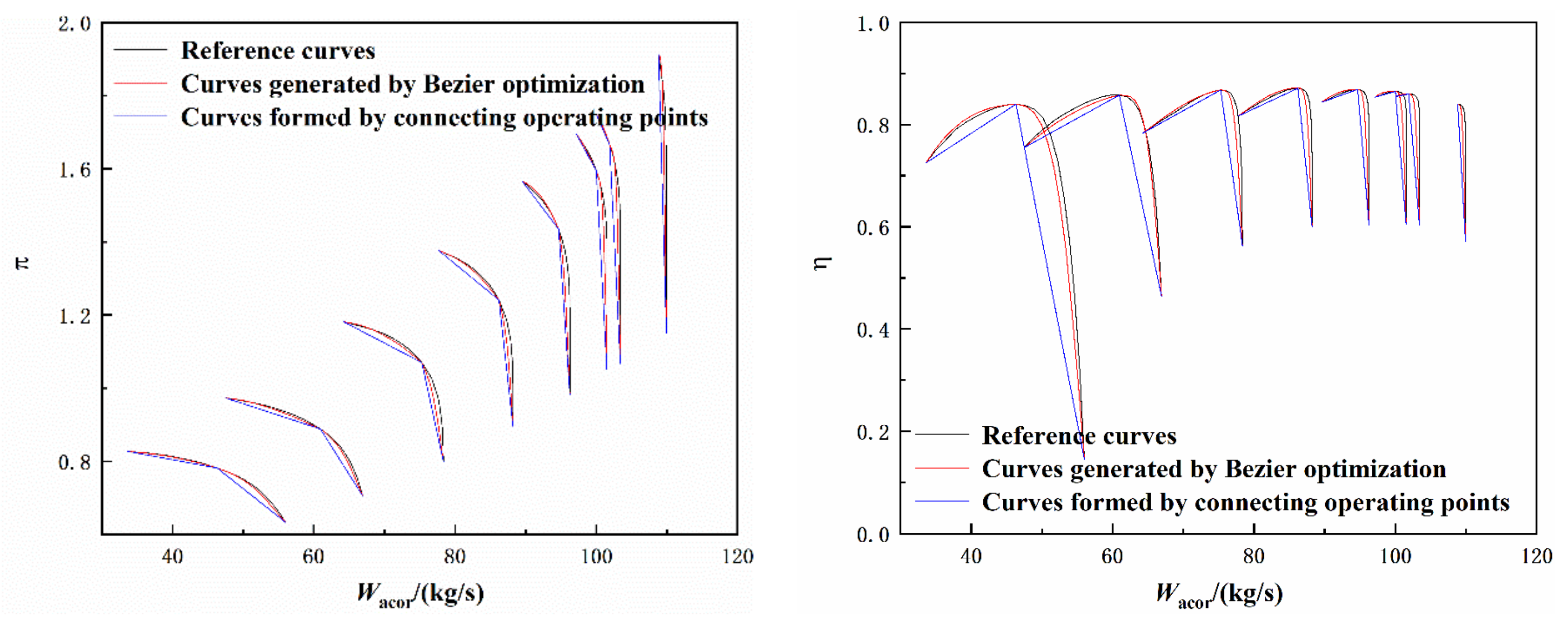
- The method proposed in this paper is to establish the Bezier curve optimization problem and solve it with SQP to smooth fit characteristic lines. The simulations show that the characteristic line generated by this method is better than that generated by directly connecting the operating points of components, and the error between the generated characteristic lines and the real characteristic lines is small;
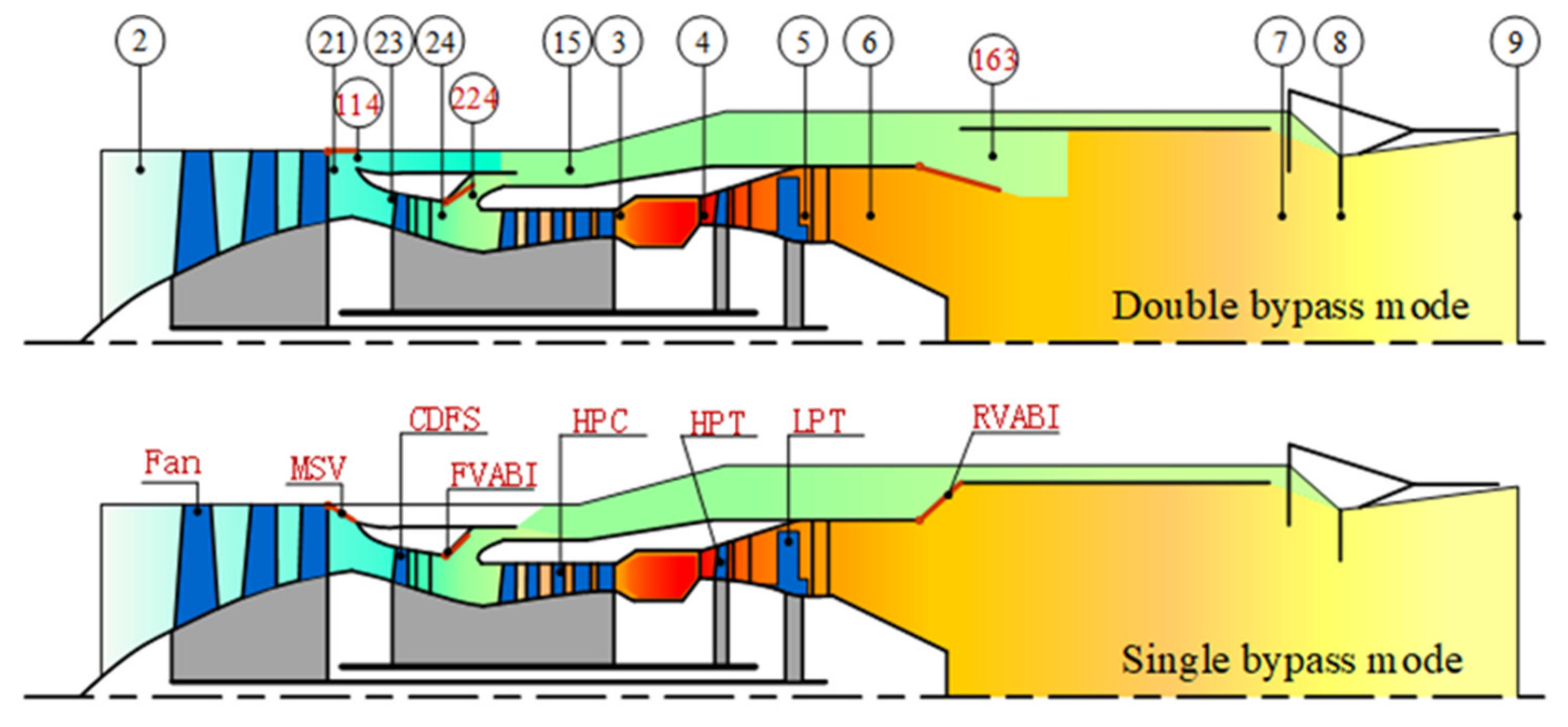
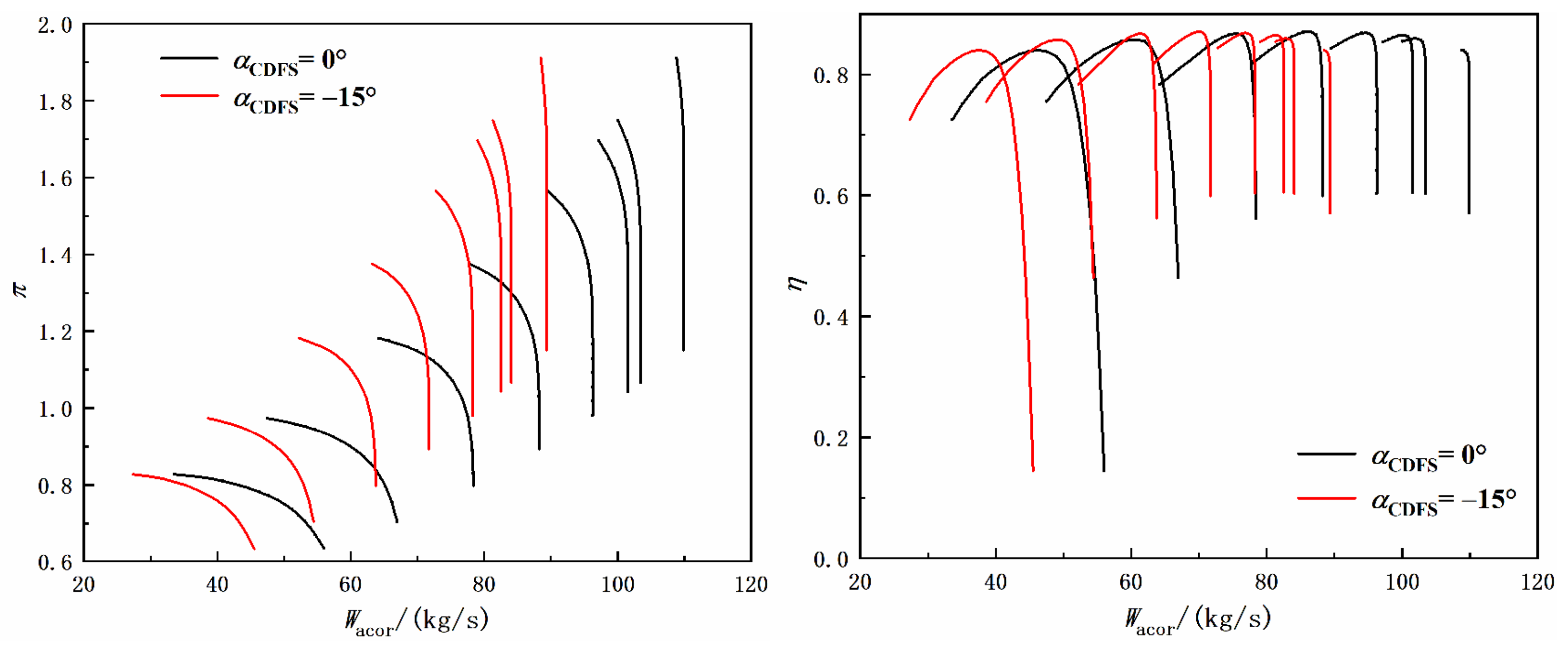
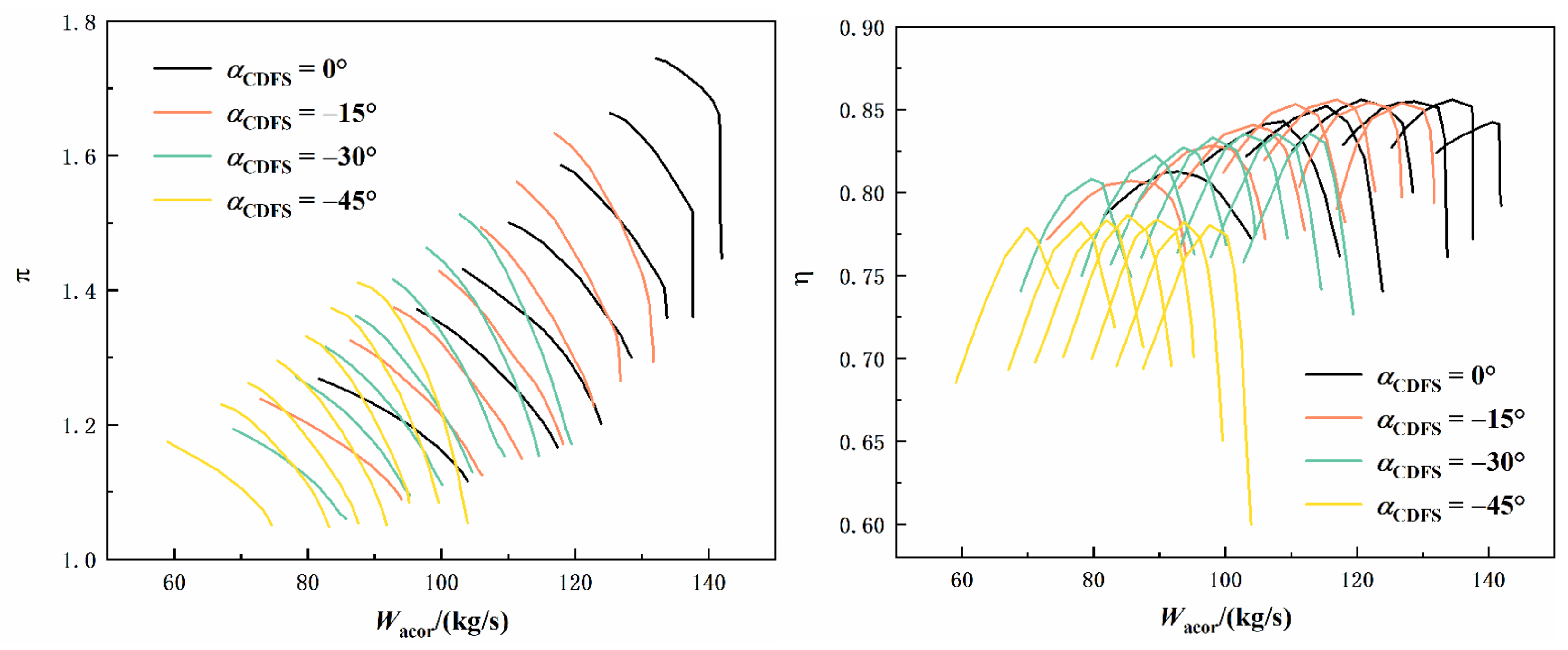
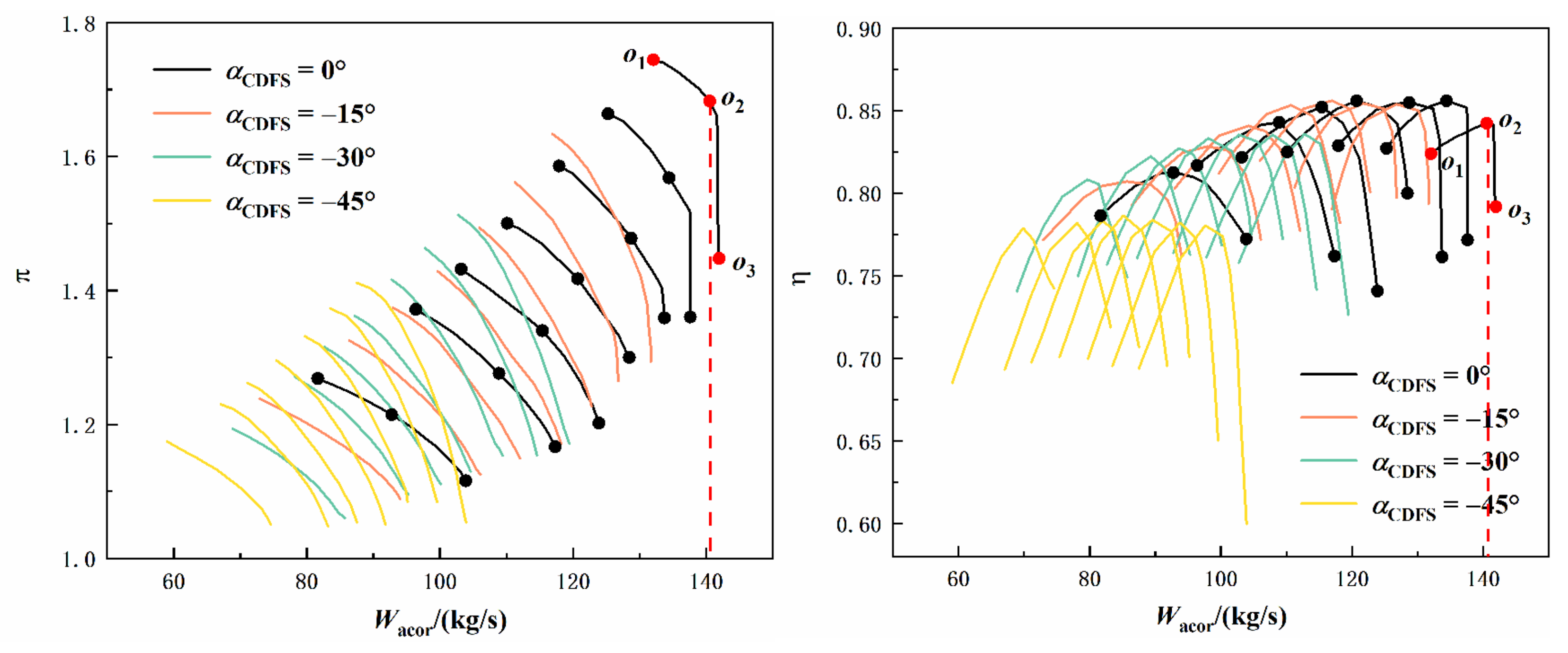
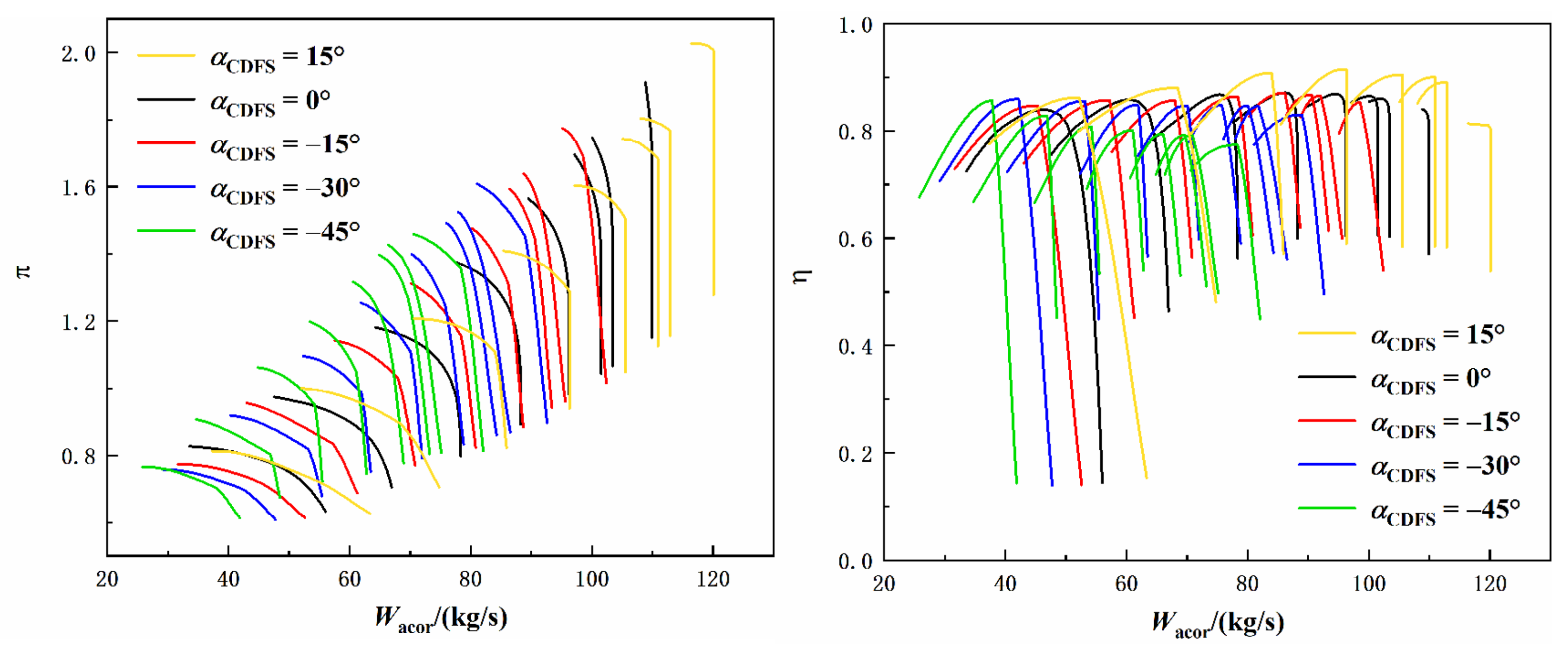
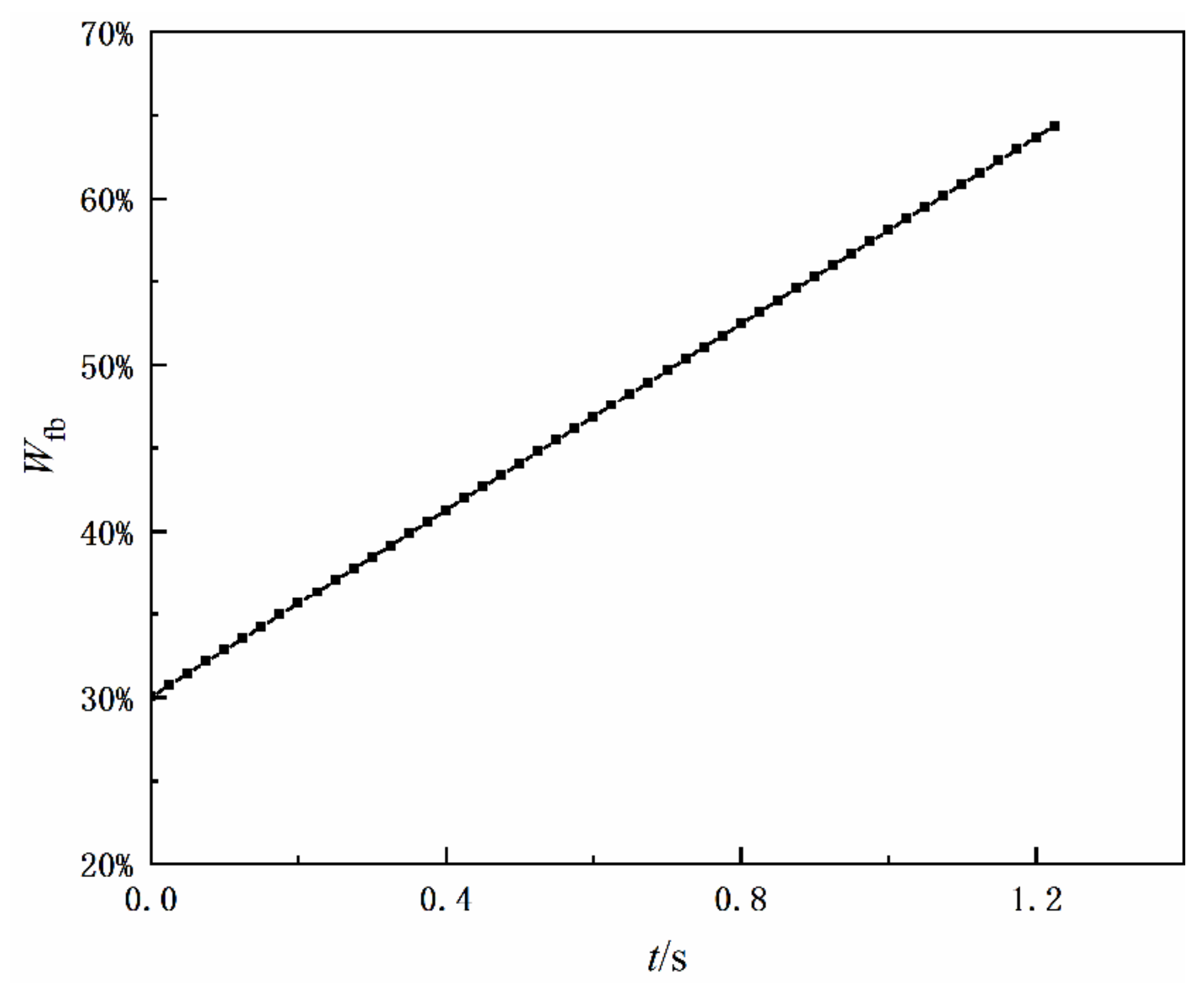
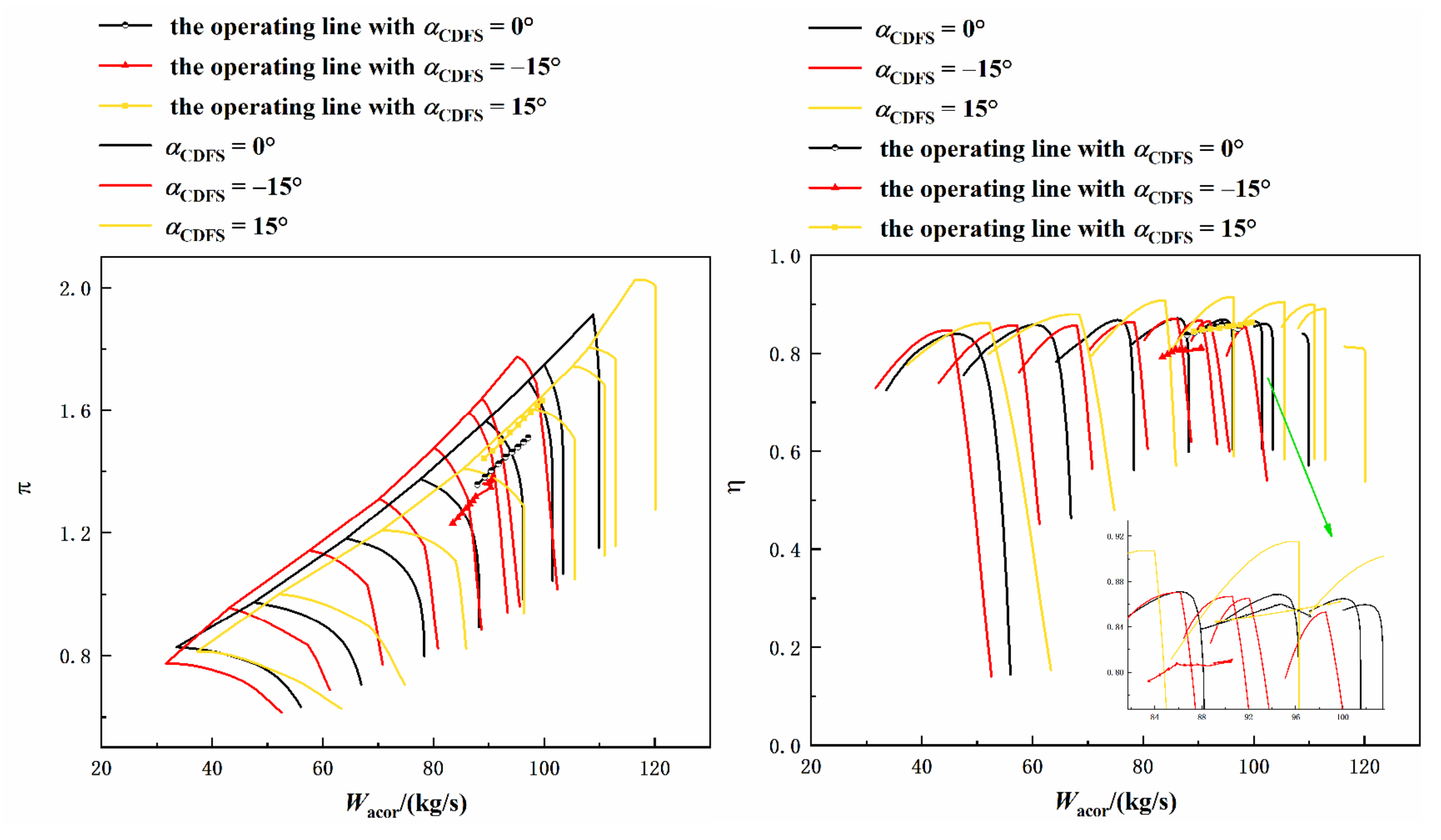
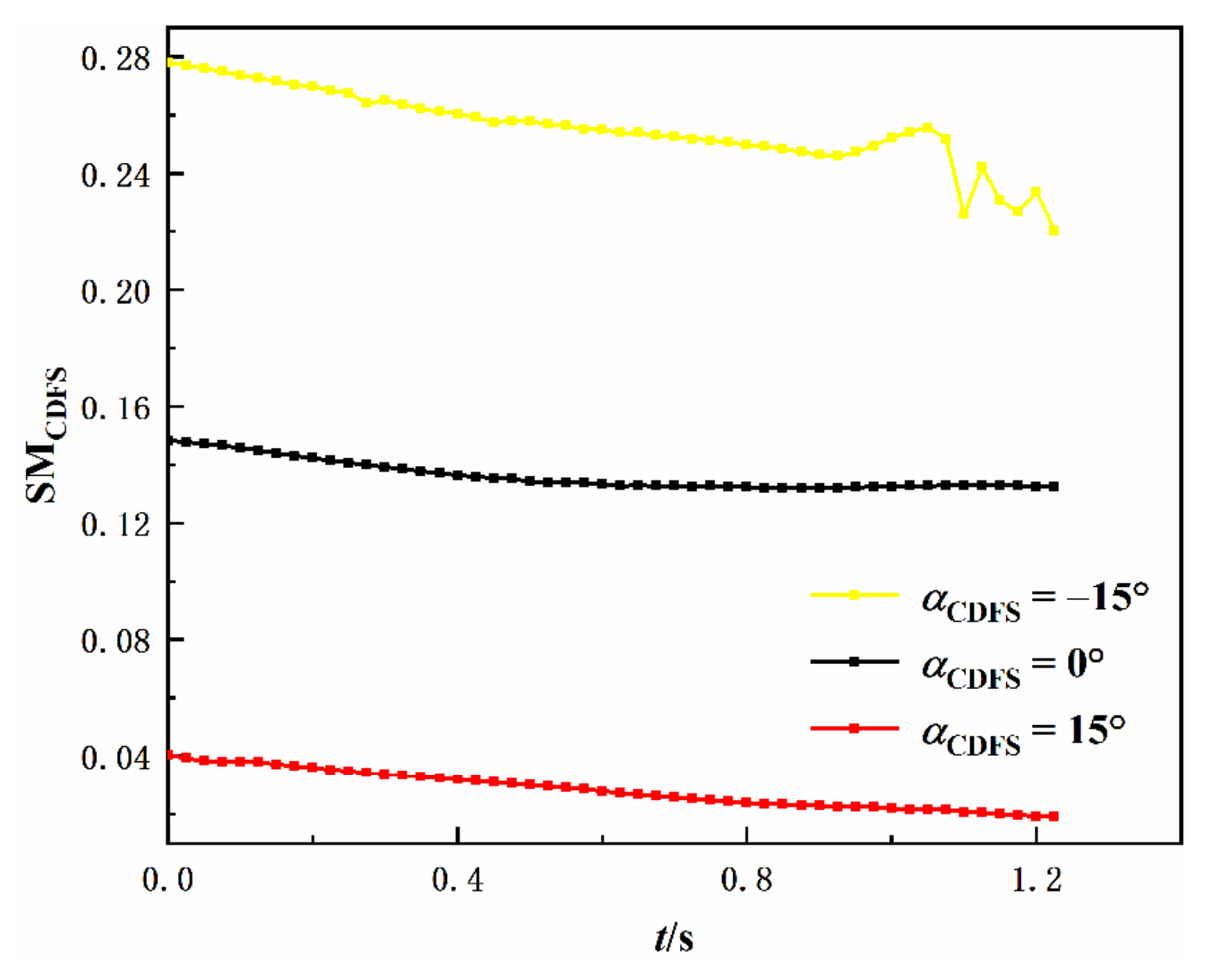
- Simulations of the acceleration process of the variable cycle engine are carried out in this paper. The results show that the designed characteristics of the CDFS can well reflect the change law of the characteristics when the geometric angle changes. When the guide vane angle changes, the component characteristics, such as surge margin, efficiency, etc., will also change accordingly. Therefore, in the subsequent design of the aeroengine control schedule, factors such as limits and performance should be comprehensively considered to determine an appropriate control schedule for the guide vane.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Nelson, D.P.; Morris, P.M. Experimental Aerodynamic and Acoustic Model Testing of the Variable Cycle Engine (VCE) Testbed Coannular Exhaust Nozzle System: Comprehensive Data Report; NASA: Washington, DC, USA, 1980. Available online: https://ntrs.nasa.gov/citations/19800017801 (accessed on 10 January 2023).
- Willis, E.; Welliver, A. Variable-cycle engines for supersonic cruise aircraft. In Proceedings of the 12th Propulsion Conference, Key Biscayne, FL, USA, 14–17 November 1976. [Google Scholar] [CrossRef]
- Berton, J.J.; Haller, W.J.; Seidel, J.A.; Senick, P.F. A NASA Lewis Comparative Propulsion System Assessment for the High-Speed Civil Transport. In NASA. Langley Research Center, First Annual High-Speed Research Workshop, Part 2; NASA: Washington, DC, USA, 1992. Available online: https://ntrs.nasa.gov/citations/19940028971 (accessed on 10 January 2023).
- Szellga, R.; Allan, R.D. Advanced Supersonic Technology Propulsion System Study; SAE International: Warrendale, PA, USA, 1974. [Google Scholar]
- Vyvey, P.; Bosschaerts, W.; Fernandez, V.; Paniagua, G. Study of an Airbreathing Variable Cycle Engine. In Proceedings of the 47th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, San Diego, CA, USA, 31 July–3 August 2011. [Google Scholar]
- Buettner, R.; Roberts, R.A.; Wolff, M.; Behbahani, A. Design of a Transient Variable Cycle Turbine Engine Model for System Integration with Controls. In Proceedings of the AIAA Modeling and Simulation Technologies Conference, Grapevine, TX, USA, 9–13 January 2017. [Google Scholar]
- Wood, A.; Pilidis, P. A variable cycle jet engine for ASTOVL aircraft. Aircr. Eng. Aerosp. Technol. 1997, 69, 534–539. [Google Scholar] [CrossRef]
- Nascimento, M.; Pilidis, P. The selective bleed variable cycle engine. In Proceedings of the ASME 1991 International Gas Turbine and Aeroengine Congress and Exposition, Orlando, FL, USA, 3–6 June 1991. [Google Scholar]
- Murthy, S.; Curran, E.T. Variable Cycle Engine Developments at General Electric-1955–1995. In Developments in High-Speed Vehicle Propulsion Systems; American Institute of Aeronautics and Astronautics: Reston, VI, USA, 1996; pp. 105–158. [Google Scholar]
- Song, F.; Zhou, L.; Wang, Z.; Lin, Z.; Shi, J. Integration of high-fidelity model of forward variable area bypass injector into zero-dimensional variable cycle engine model. Chin. J. Aeronaut. 2021, 34, 1–15. [Google Scholar] [CrossRef]
- Chen, H.; Cai, C.; Luo, J.; Zhang, H. Flow control of double bypass variable cycle engine in modal transition. Chin. J. Aeronaut. 2022, 35, 134–147. [Google Scholar] [CrossRef]
- Fishbach, L.H.; Koenig, R.W. Geneng II: A Program for Calculating Design and off-Design Performance of Two- and Three-Spool Turbofans with as Many as Three Nozzles; NASA: Washington, DC, USA, 1972.
- Villace, V.F.; Paniagua, G. Numerical Model of a Variable-Combined-Cycle Engine for Dual Subsonic and Supersonic Cruise. Energies 2013, 6, 839–870. [Google Scholar] [CrossRef]
- Lytle, J.; Follen, G.; Naiman, C.; Evans, A. Numerical Propulsion System Simulation (NPSS) 1999 Industry Review; NASA: Washington, DC, USA, 2000.
- Patrick, M.; Nicholas, N.; Kevin, M.; Eric, W.; Joshua, C.; Soumya, P. A First Principles Based Approach for Dynamic Modeling of Turbomachinery. SAE Int. J. Aerosp. 2016, 9, 45. [Google Scholar]
- Kania, M.; Koeln, J.; Alleyne, A.; McCarthy, K.; Wu, N. A Dynamic Modeling Toolbox for Air Vehicle Vapor Cycle Systems; SAE International: Warrendale, PA, USA, 2012; Volume 10. [Google Scholar]
- Fang, X.; Liu, S.; Wang, P.; Zhang, W. Application of a 3D Blade Design Method for Supersonic Vaneless Contra-Rotating Turbine. In Proceedings of the ASME Turbo Expo 2008: Power for Land, Sea, and Air, Berlin, Germany, 9–13 June 2008. [Google Scholar]
- Fang, X.; Zhao, Y.; Liu, S.; Wang, P.; Liu, Z. Research of a New Design Method of Variable Area Nozzle Turbine for VCE: Harmonic Design Method. In Proceedings of the ASME 2011 Turbo Expo: Turbine Technical Conference and Exposition, Vancouver, BC, Canada, 6–10 June 2011. [Google Scholar]
- Sundstrm, E.; Semlitsch, B.; Mihaescu, M. Assessment of the 3D Flow in a Centrifugal compressor using Steady-State and Unsteady Flow Solvers. In Proceedings of the SAE 2014 International Powertrain, Fuels & Lubricants Meeting, Birmingham, UK, 20–23 October 2014. [Google Scholar]
- Tsoutsanis, E.; Meskin, N.; Benammar, M. An efficient component map generation method for prediction of gas turbine performance. ASME 2014, 6, V006T06A00. [Google Scholar]
- Tsoutsanis, E.; Khorasani, K.; Benammar, M. Transient gas turbine performance diagnostics through nonlinear adaptation of compressor and turbine maps. J. Eng. Gas Turbines Power 2015, 137, 091201. [Google Scholar] [CrossRef]
- Pilidis, P.; Li, Y.; Newby, M.; Tsoutsanis, E. Non-linear model calibration for off-design performance prediction of gas turbines with experimental data. Aeronaut. J. 2017, 121, 1758–1777. [Google Scholar]
- Steven, G.; Jeffrey, D.; Roy, J.; Walter, S. Compressor Performance Modeling and Prognostics Using Artificial Neural Networks. AIAA 2016-0171. In Proceedings of the AIAA Modeling and Simulation Technologies Conference, San Diego, CA, USA, 4–8 January 2016. [Google Scholar]
- Pau, C.; Hui, W.; Soumya, S. Patnaik. Modeling of Centrifugal Compressor Performance Using Machine Learning Techniques. AIAA 2020-0134. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020. [Google Scholar]
- Kurzke, J.; Riegler, C. A New Compressor Map Scaling Procedure for Preliminary Conceptional Design of Gas Turbines. In Proceedings of the ASME Turbo Expo 2000: Power for Land, Sea, and Air, Munich, Germany, 8–11 May 2000. [Google Scholar]
- Kurzke, J. Model Based Gas Turbine Parameter Corrections. In Proceedings of the ASME Turbo Expo, Collocated with the International Joint Power Generation Conference, Atlanta, GA, USA, 16–19 June 2003. [Google Scholar]
- Li, Y.; Ghafir, M.; Wang, L.; Singh, R.; Huang, K.; Feng, X.; Zhang, W. Improved Multiple Point Non-Linear Genetic Algorithm Based Performance Adaptation Using Least Square Method. J. Eng. Gas Turbines Power 2012, 134, 031701. [Google Scholar] [CrossRef]
- Li, S.; Tang, H.; Chen, M. A new component maps correction method using variable geometric parameters. Chin. J. Aeronaut. 2021, 34, 360–374. [Google Scholar] [CrossRef]
- Sullivan, T.; Parker, D. Design Study and Performance Analysis of a High-Speed Multistage Variable-Geometry Fan for a Variable Cycle Engine; NASA: Washington, DC, USA, 1979.
- Ren, C.; Chen, Y.; Jia, L.; Zhou, C. Variable compression component interpolation method for turbine engine. In Proceedings of the 2018 9th International Conference on Mechanical and Aerospace Engineering (ICMAE), Budapest, Hungary, 10–13 July 2018. [Google Scholar]
- Matthew, G.L.; Phillip, J.A. A Parametrization Framework for Multi-Element Airfoil Systems Using Bézier Curves, AIAA 2022-3525. In Proceedings of the AIAA AVIATION 2022 Forum, Chicago, IL, USA, 16 June 2022. [Google Scholar]
- Satyanarayana, G.M.; David, C.; Isaac, E.W.; Dzung, M.T.; Justin, M.B.; Swaroop, D. Quadratic Bezier Curves for Multi-Agent Coordinated Arrival in the Presence of Obstacles, AIAA 2021-1879. In Proceedings of the AIAA Scitech 2021 Forum, Nashville, TN, USA, 11–15 January 2021. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RMSE | 0.39% | 0.36% | 0.35% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Huang, J.; Pan, M.; Zhou, W. Variable-Geometry Rotating Components Modeling Based on Reference Characteristic Curves for the Variable Cycle Engine. Aerospace 2023, 10, 196. https://doi.org/10.3390/aerospace10020196
Wang Y, Huang J, Pan M, Zhou W. Variable-Geometry Rotating Components Modeling Based on Reference Characteristic Curves for the Variable Cycle Engine. Aerospace. 2023; 10(2):196. https://doi.org/10.3390/aerospace10020196
Chicago/Turabian StyleWang, Yangjing, Jinquan Huang, Muxuan Pan, and Wenxiang Zhou. 2023. "Variable-Geometry Rotating Components Modeling Based on Reference Characteristic Curves for the Variable Cycle Engine" Aerospace 10, no. 2: 196. https://doi.org/10.3390/aerospace10020196
APA StyleWang, Y., Huang, J., Pan, M., & Zhou, W. (2023). Variable-Geometry Rotating Components Modeling Based on Reference Characteristic Curves for the Variable Cycle Engine. Aerospace, 10(2), 196. https://doi.org/10.3390/aerospace10020196