Enhanced IoT-Based End-To-End Emergency and Disaster Relief System

 , ,
, ,
Abstract
:1. Introduction
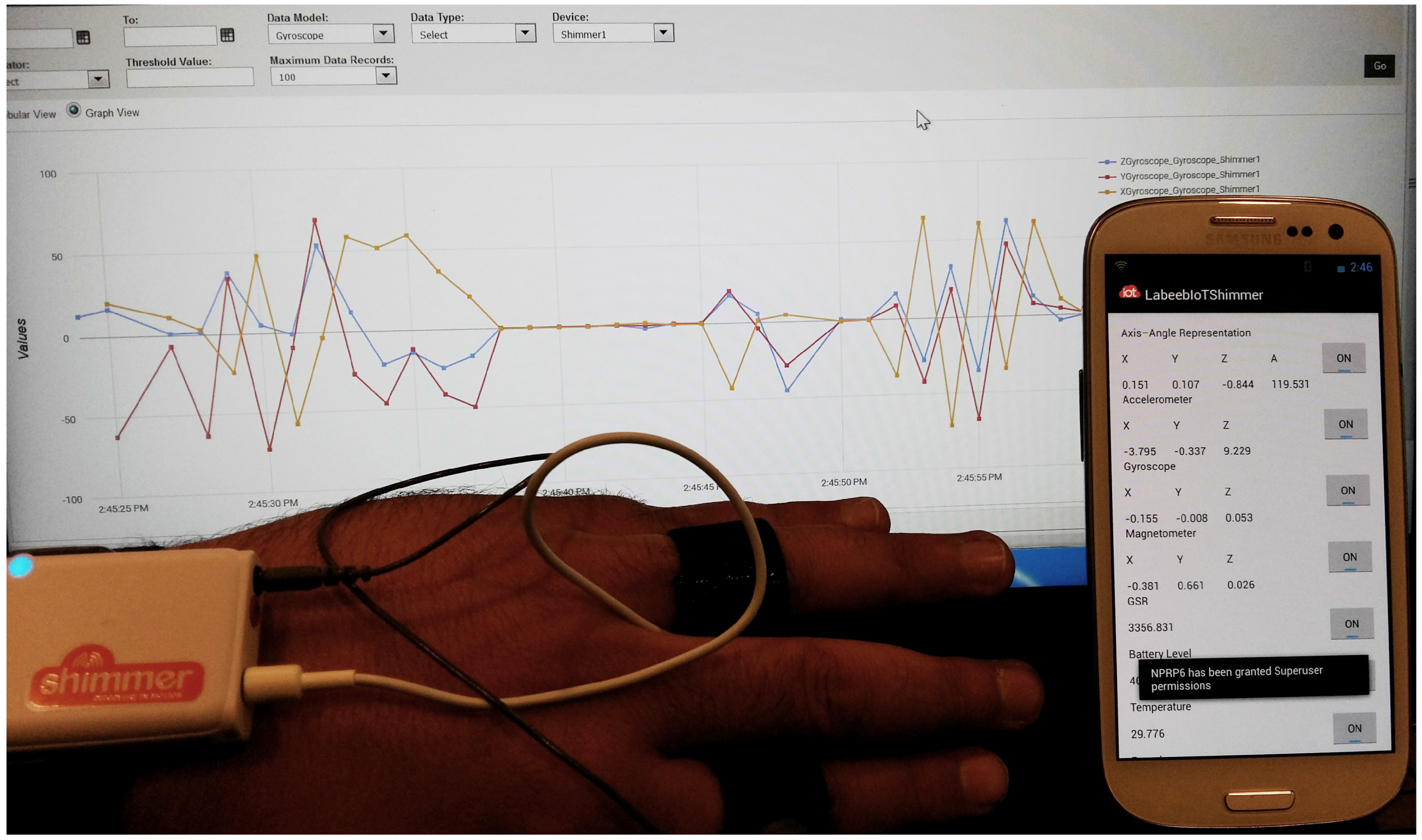
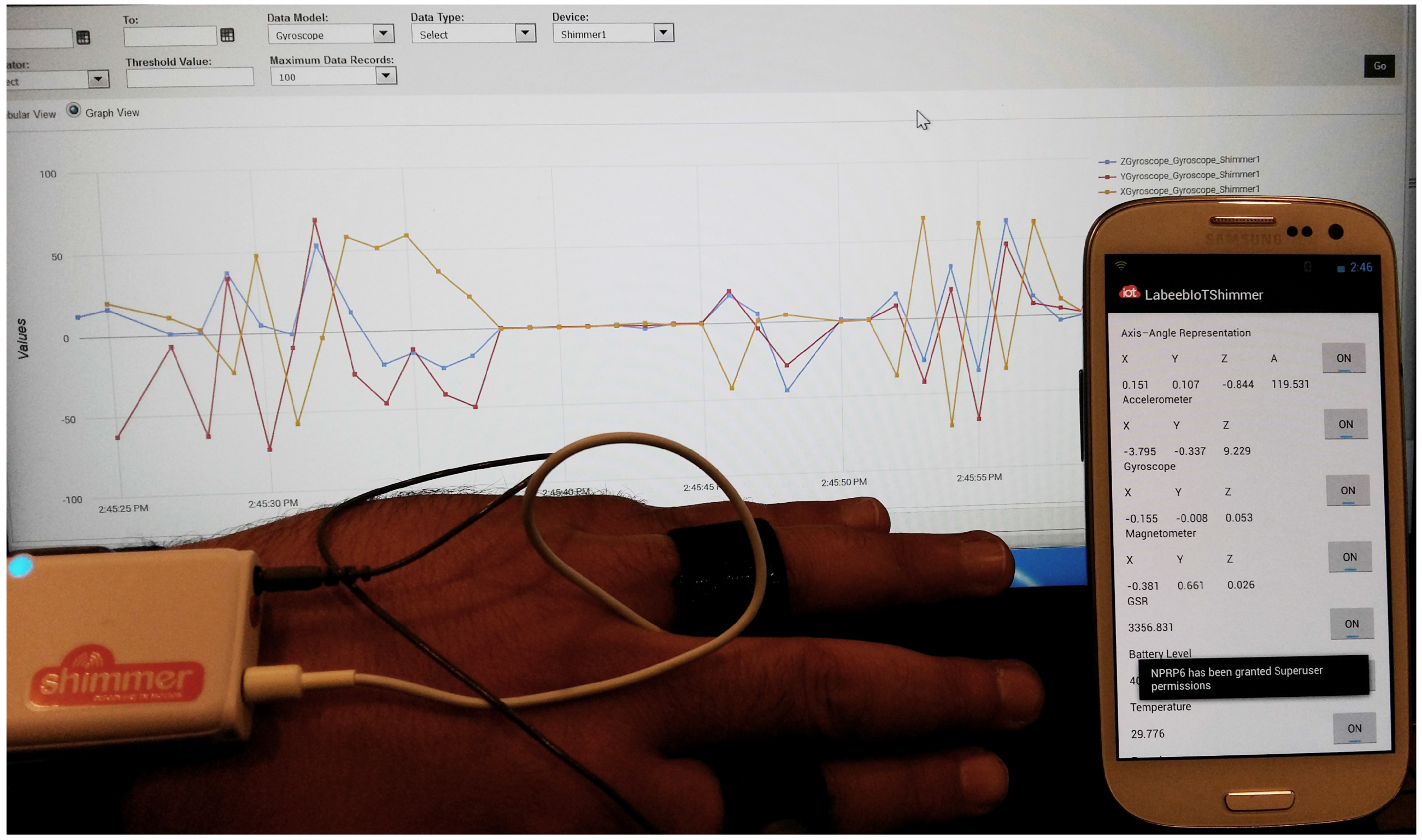
- The Critical and Rescue Operations using Wearable Wireless sensors networks (CROW) system is one of the rare proof-of-concept implementations of emergency ad hoc autonomous systems. Unlike the detailed works in Section 2, as an application layer payload, we use real-time human vital signs (motion data, heartbeat, magnetometer, etc.) collected from the on-body sensors and pushed to the IoT platform. The evaluation of the proposed system is realized on a real indoor test-bed under realistic conditions. Indeed, we experimentally investigate the mobile devices’ behavior with regards to key performance metrics, such as throughput, end-to-end delay, end-to-end link quality estimation during sensing and disseminating data onto the IoT platform.
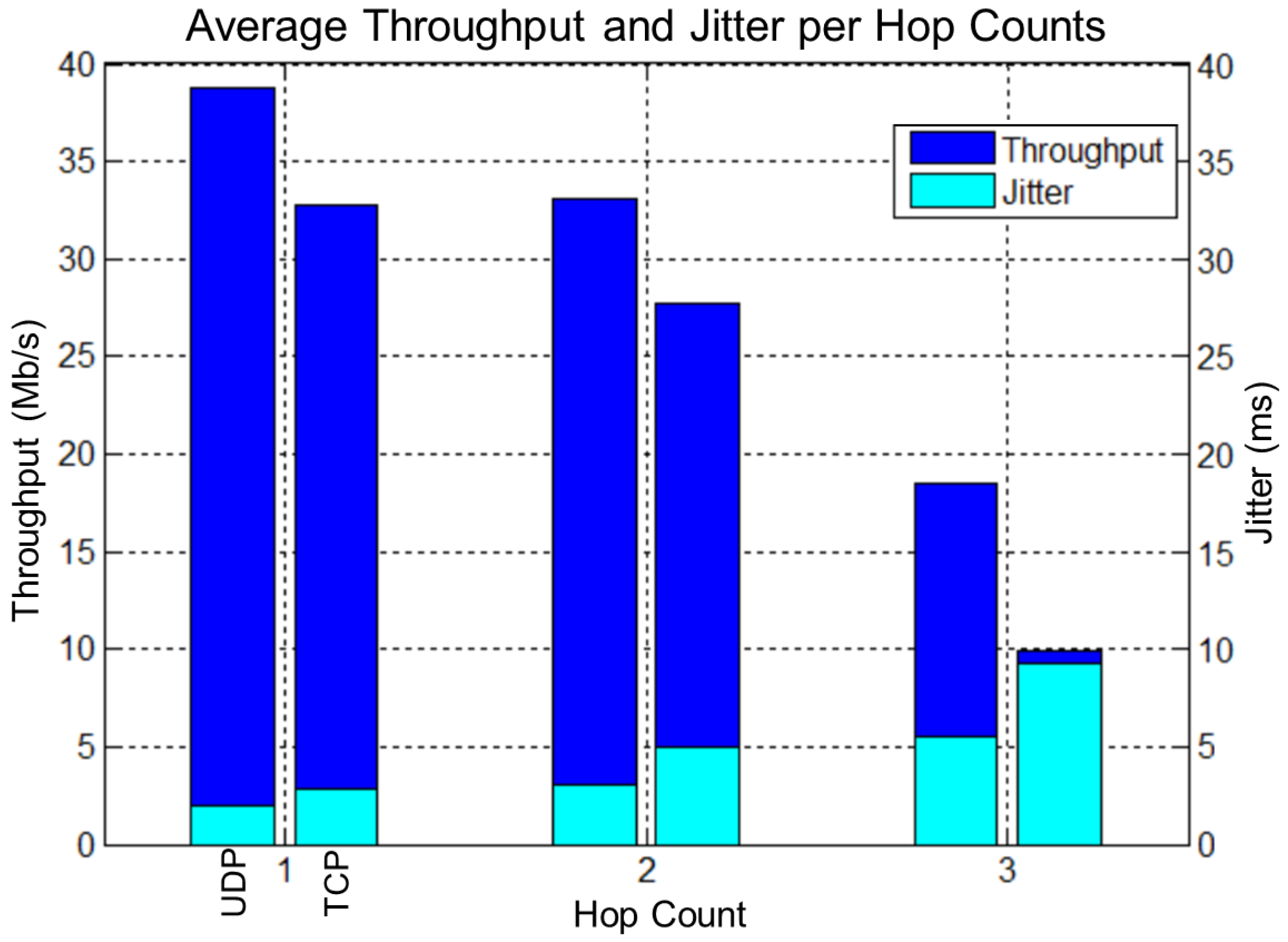
- The implemented scenario is a reference experiment for researchers and professionals to evaluate concretely the trade-off between the and in the disaster relief context [9]. Additionally, this work emphasizes the difference between UDP and TCP transport mode performances in disaster relief applications and may be considered as a reference for upcoming application implementations with regards to the bandwidth limitations. Moreover, the realized experiment advises also on the optimal hop count to guarantee the required throughput for the critical applications (medical support, military, firefighters, press and media, etc.).
- The proposed system is back-ended by an IoT platform. Indeed, at the IoT platform level, we prove the system’s capability for mobility pattern recognition and prediction. Then, we discuss the overall interference affecting the mobile devices behavior for the considered indoor scenario. The proposed system shows also a global connectivity status of all of the deployed devices during the disaster relief operations.
2. Related Works
3. The CROW2 System
3.1. History of the CROW System
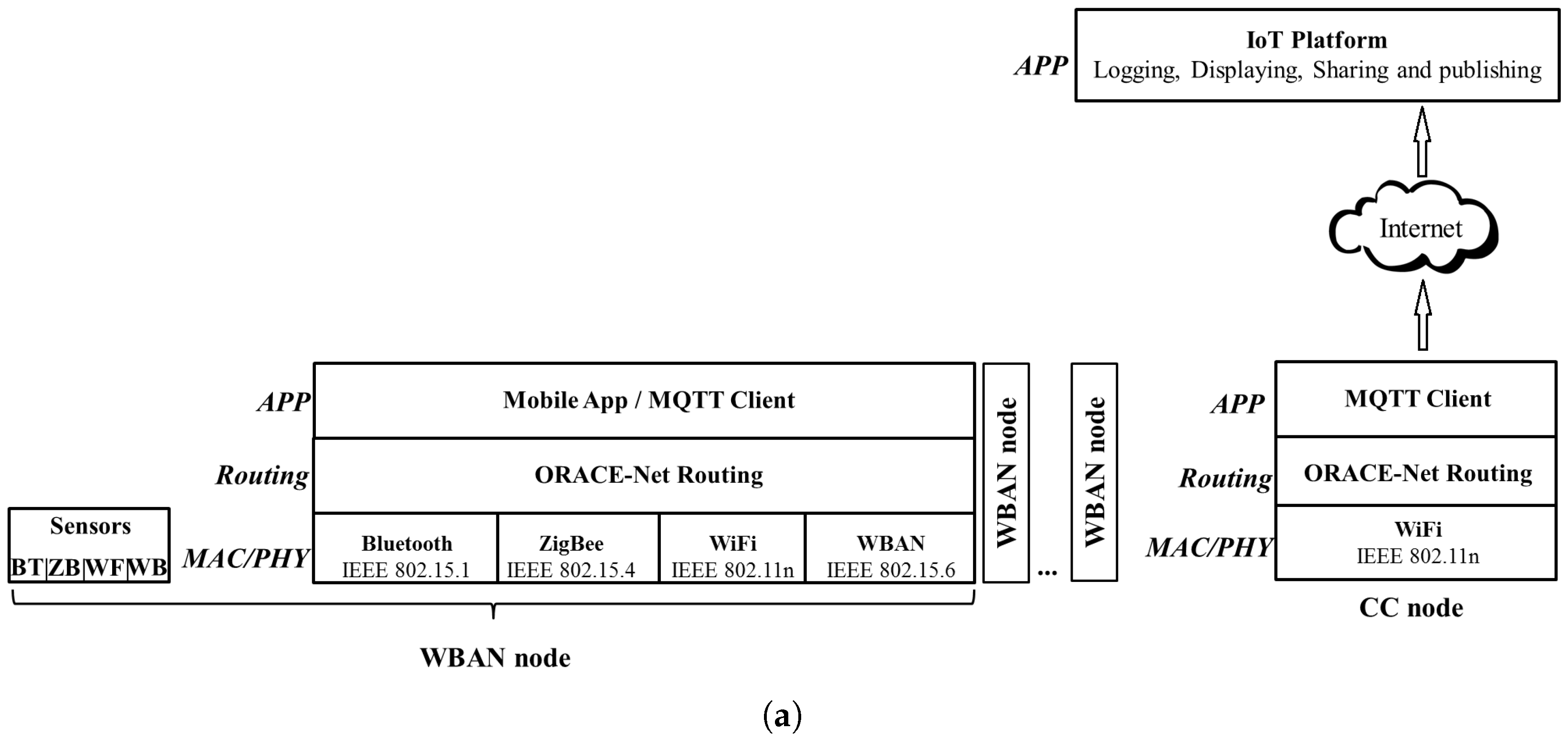
3.2. CROW System Architecture
3.3. CROW System Enhancement
4. CROW2 System Implementation
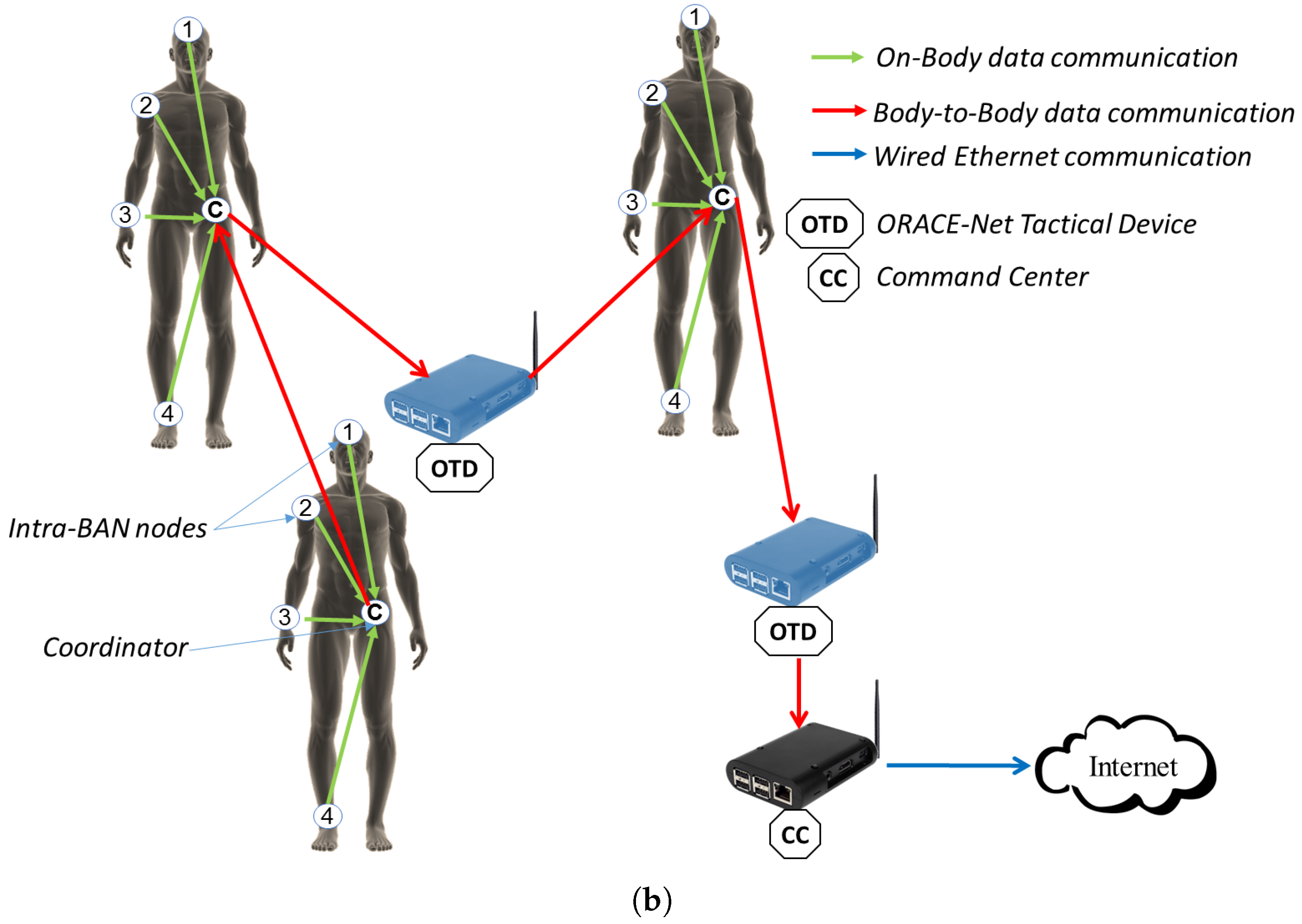
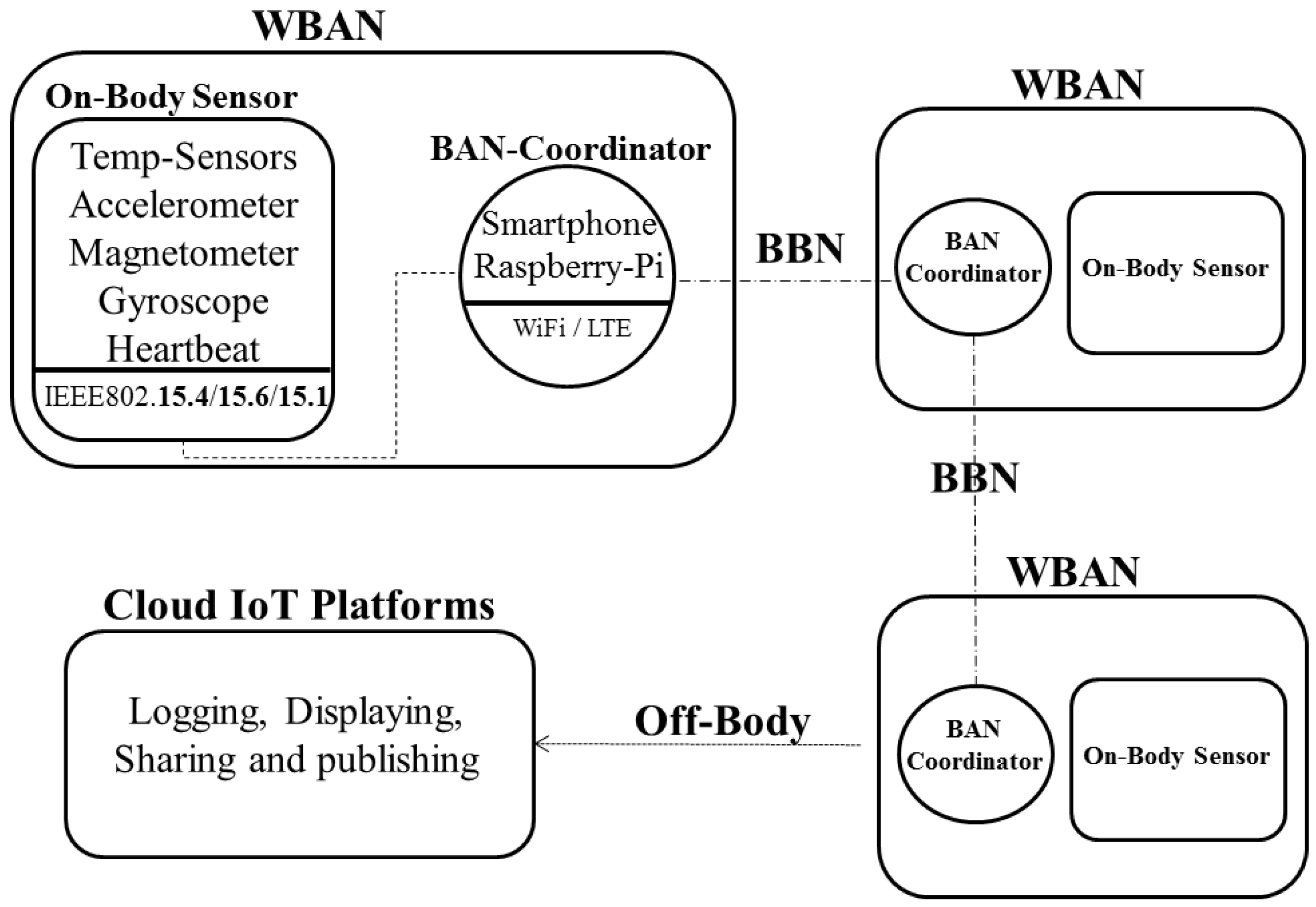
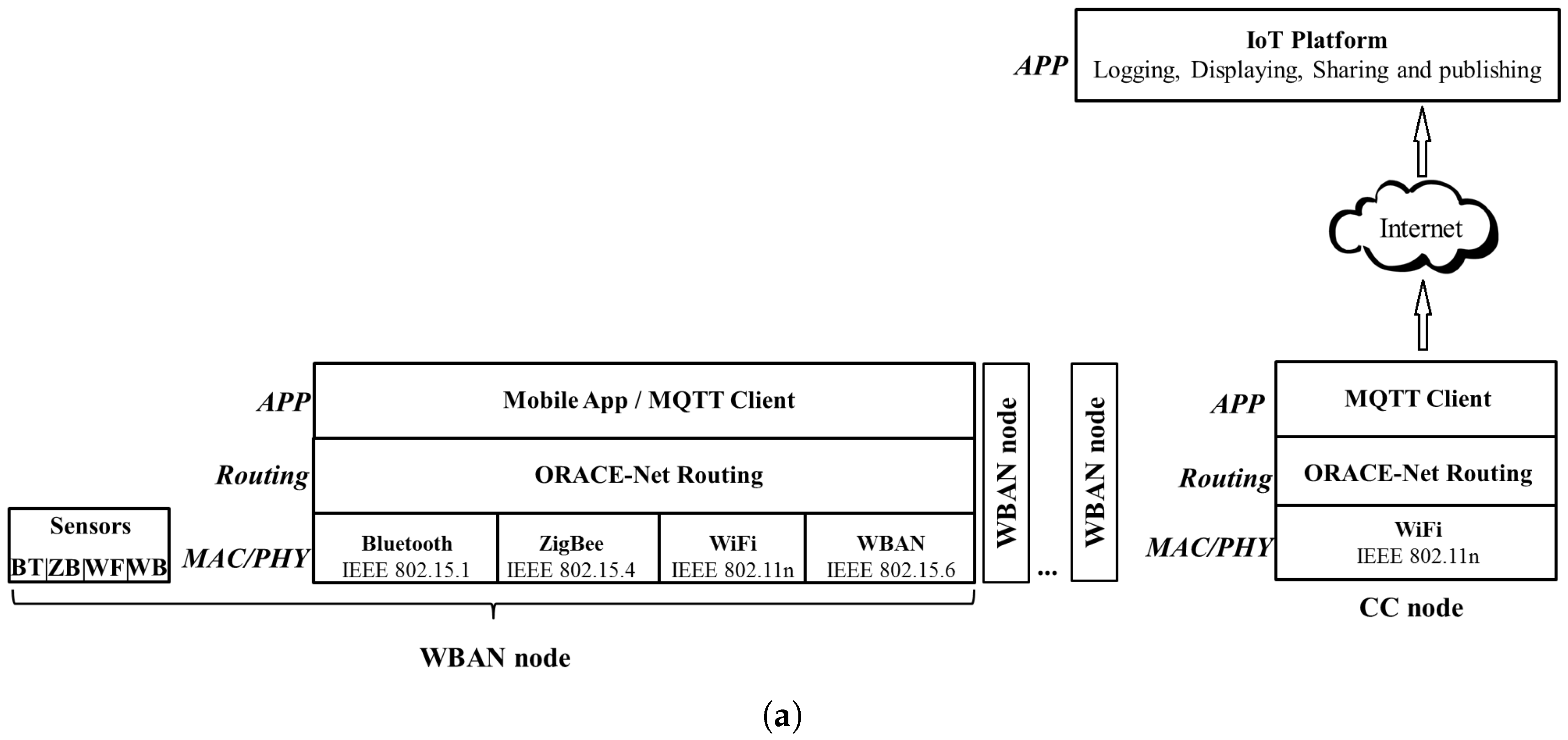
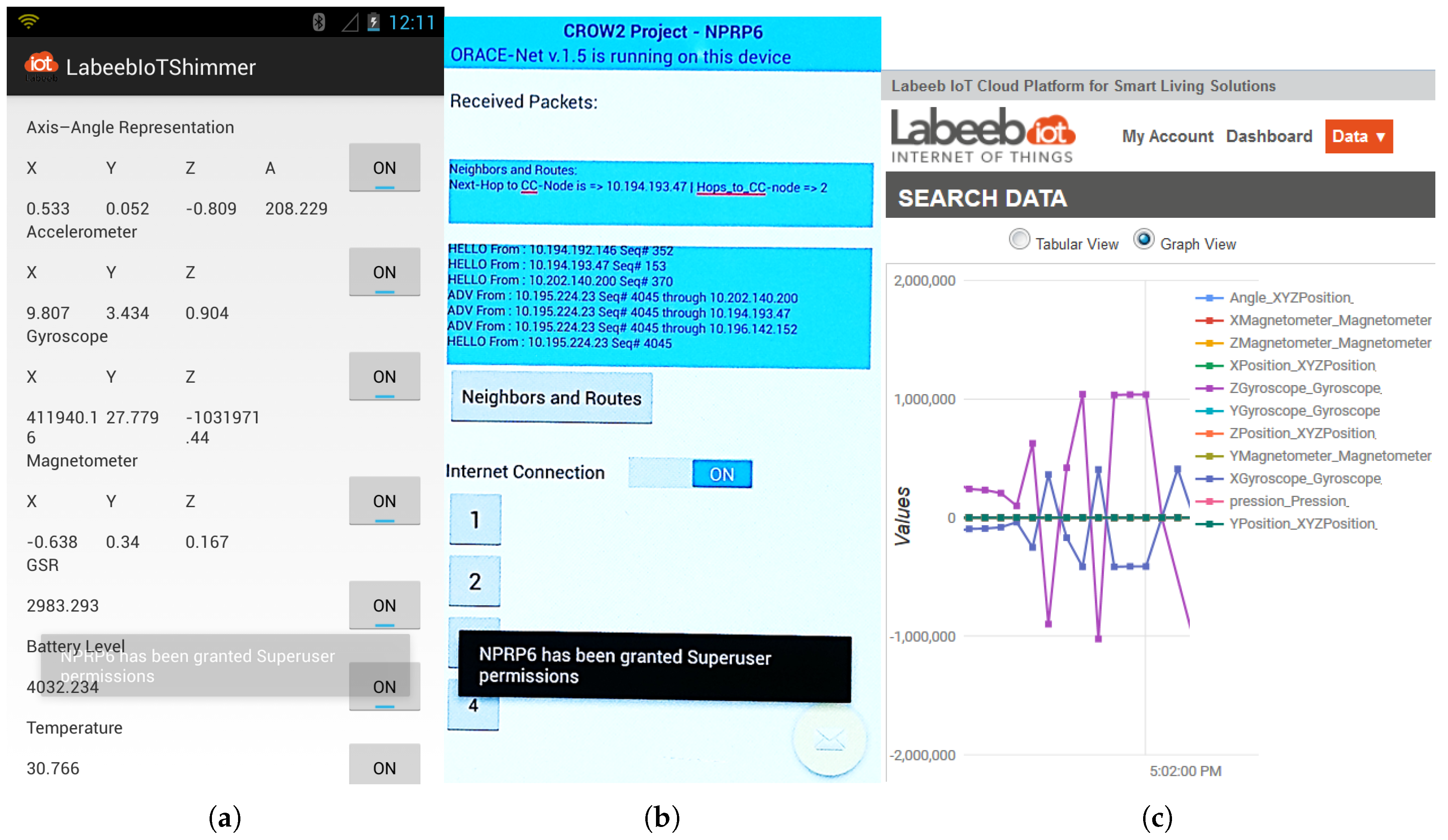
4.1. On-Body Communication
4.2. Body-To-Body Communication
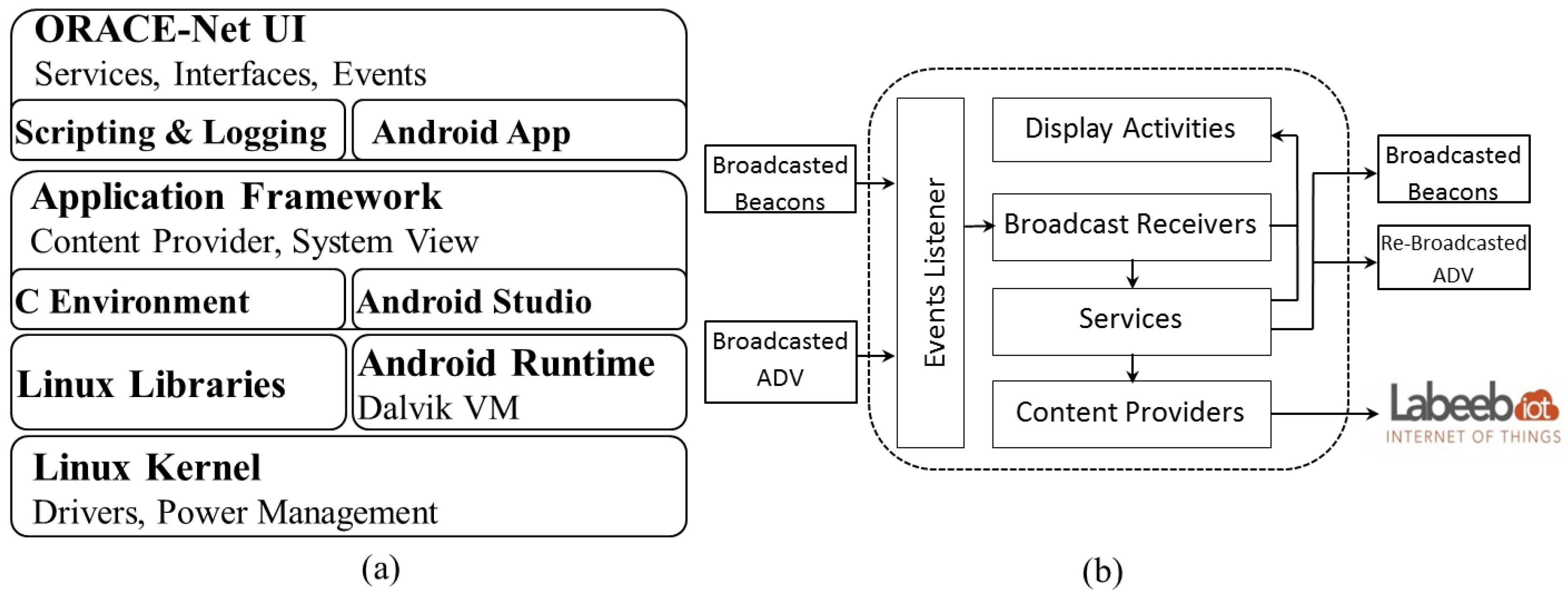
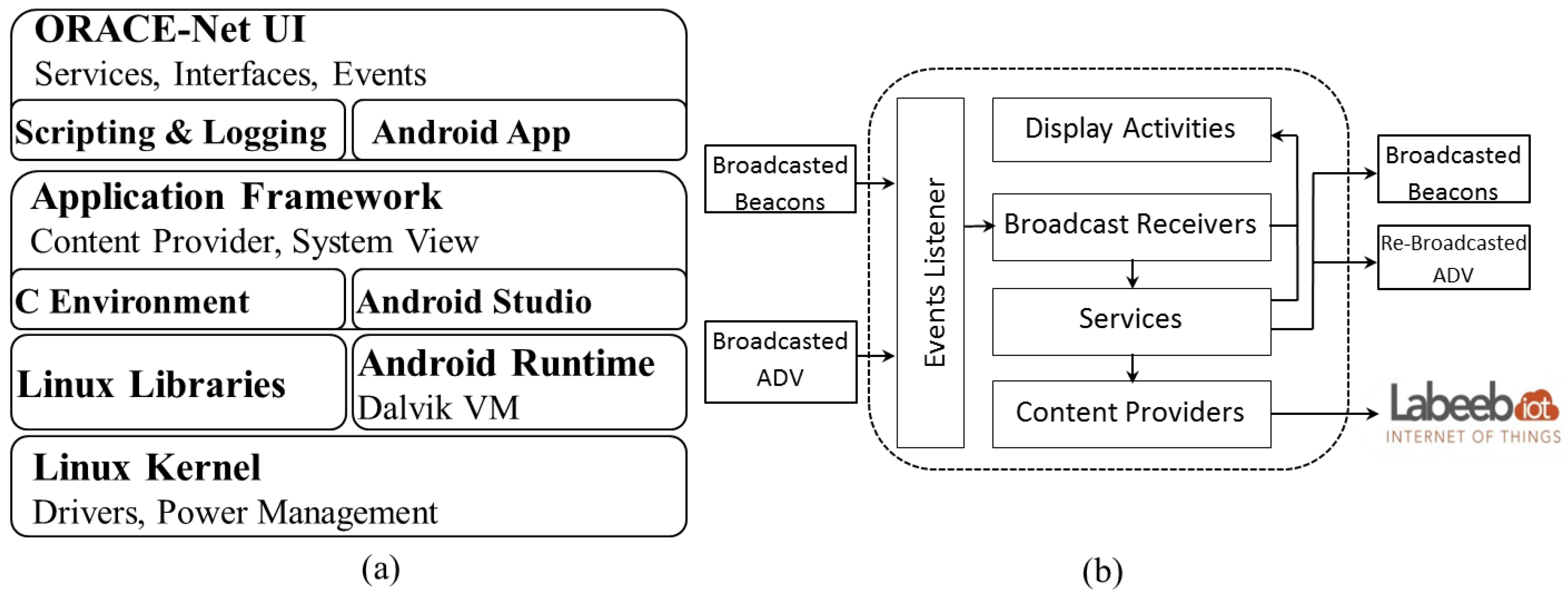
4.2.1. Android Mobile Devices
4.2.2. ORACE-Net Tactical Devices
4.3. Off-Body Communication
5. Experimentation
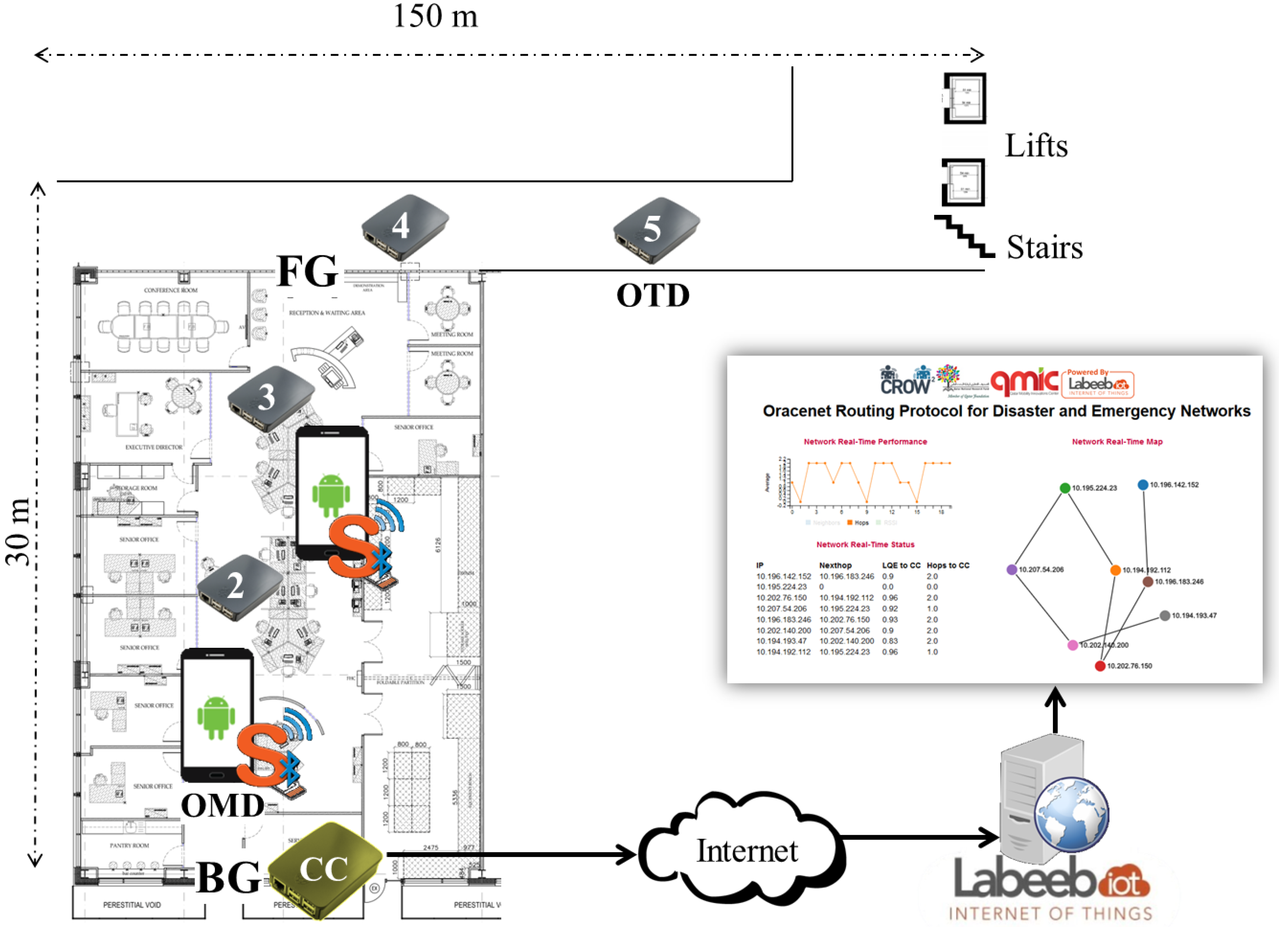
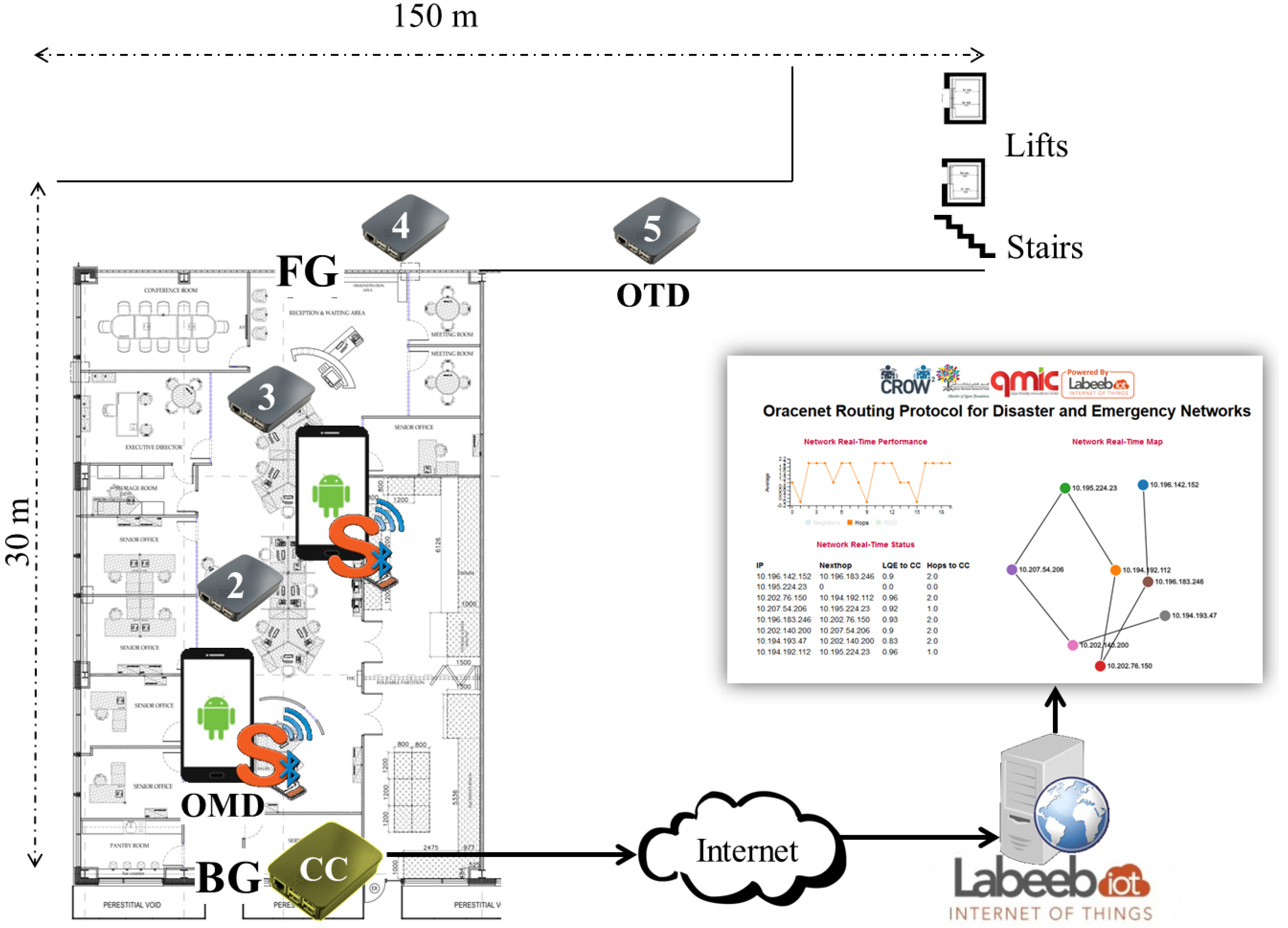
5.1. Deployment Scenario and Experimental Setup
5.2. Results and Discussion
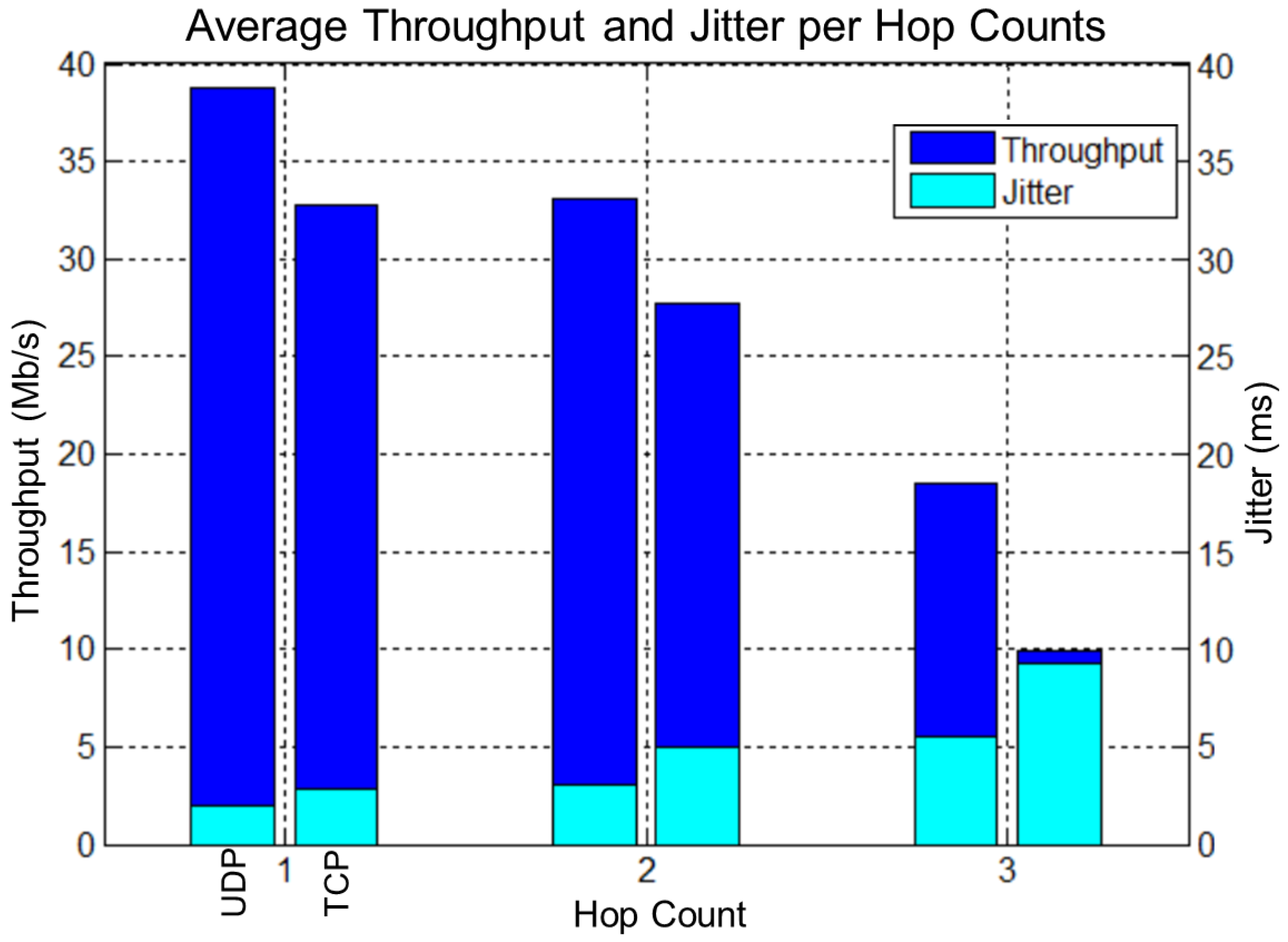
5.2.1. Throughput and Jitter
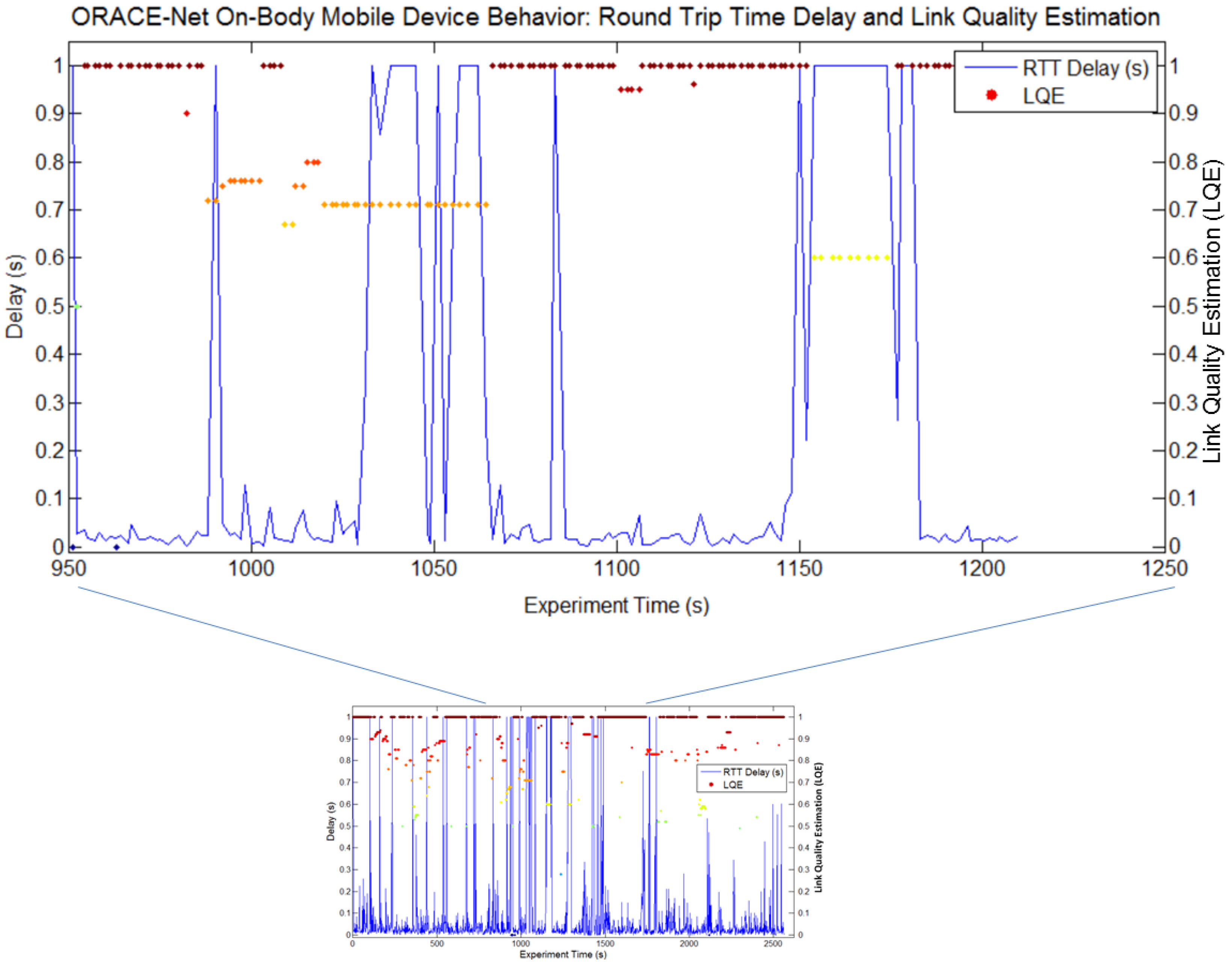
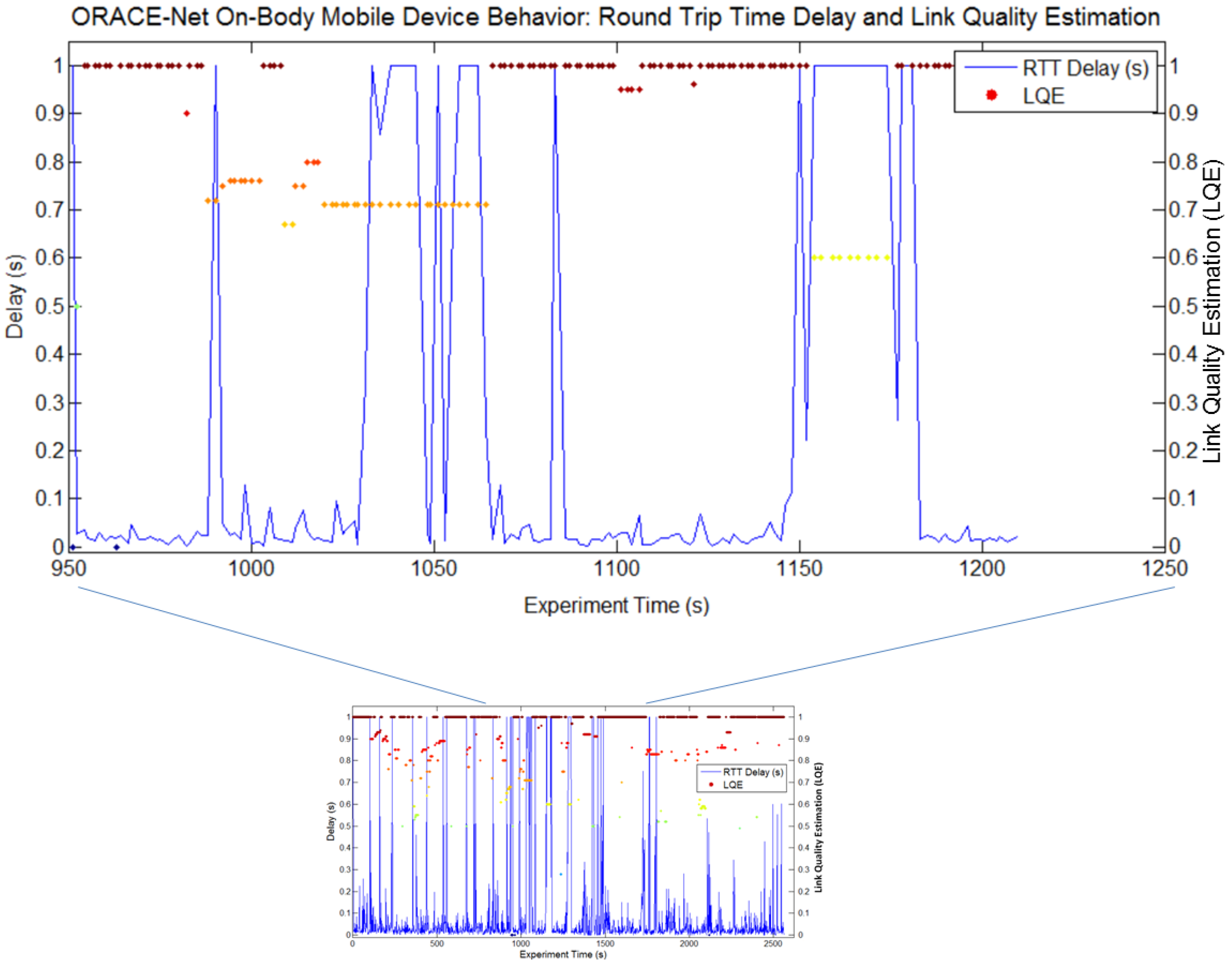
5.2.2. End-To-End Delay and Link Quality Estimation
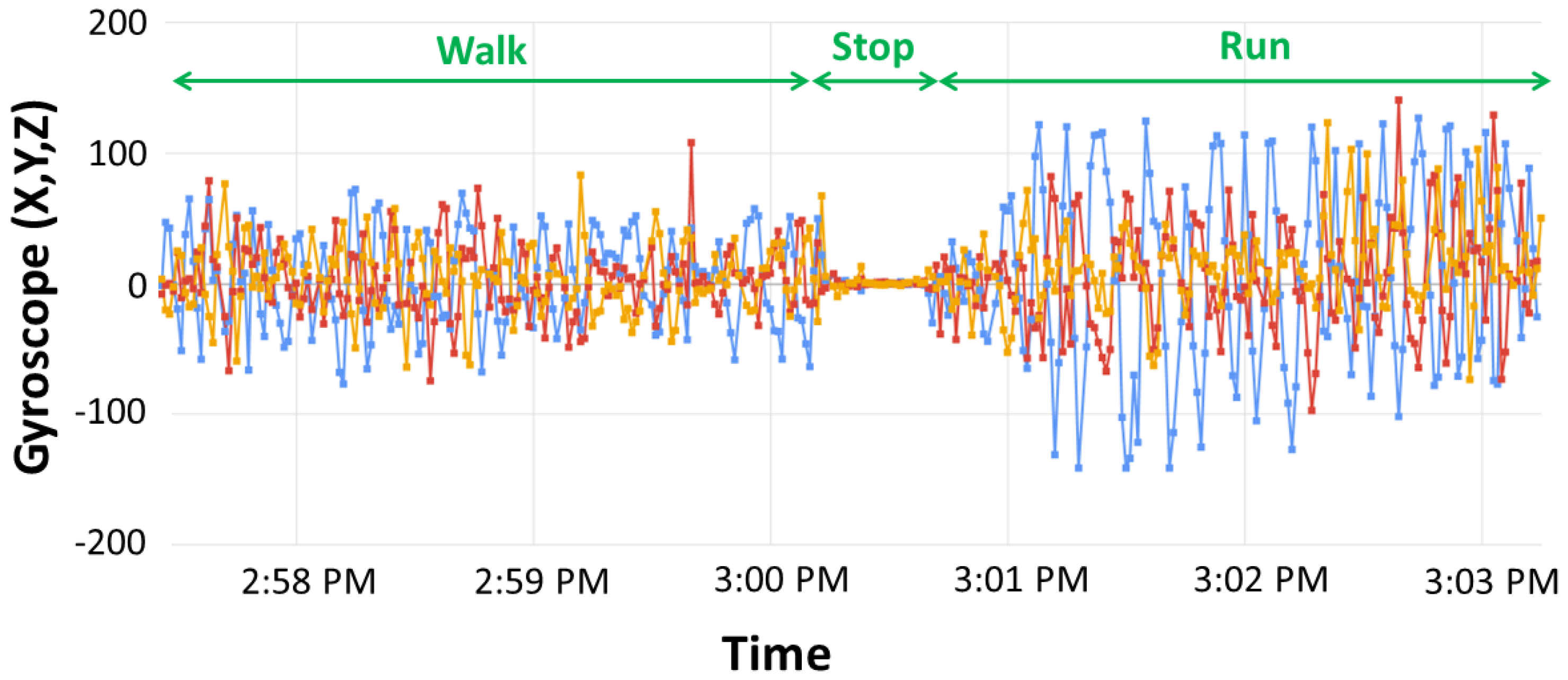
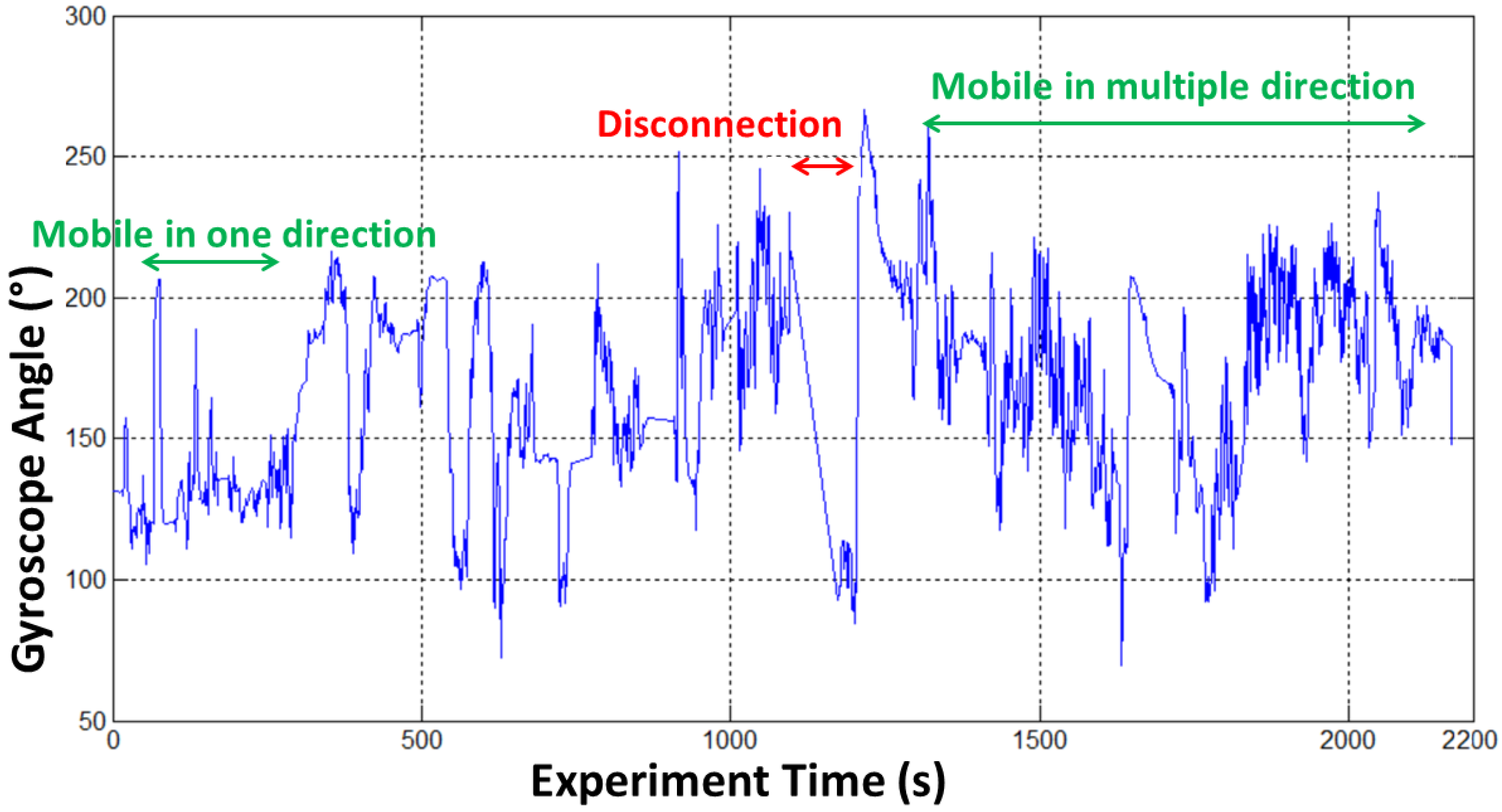
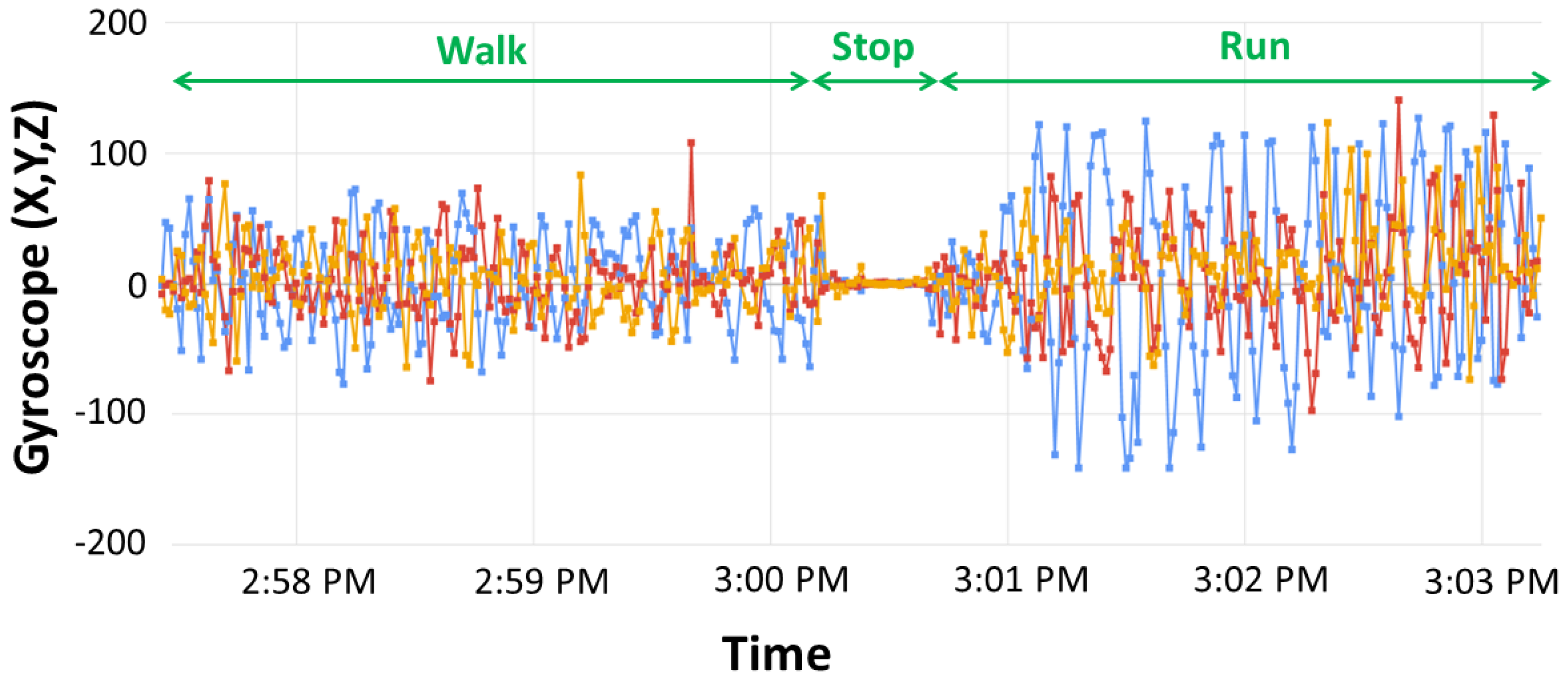
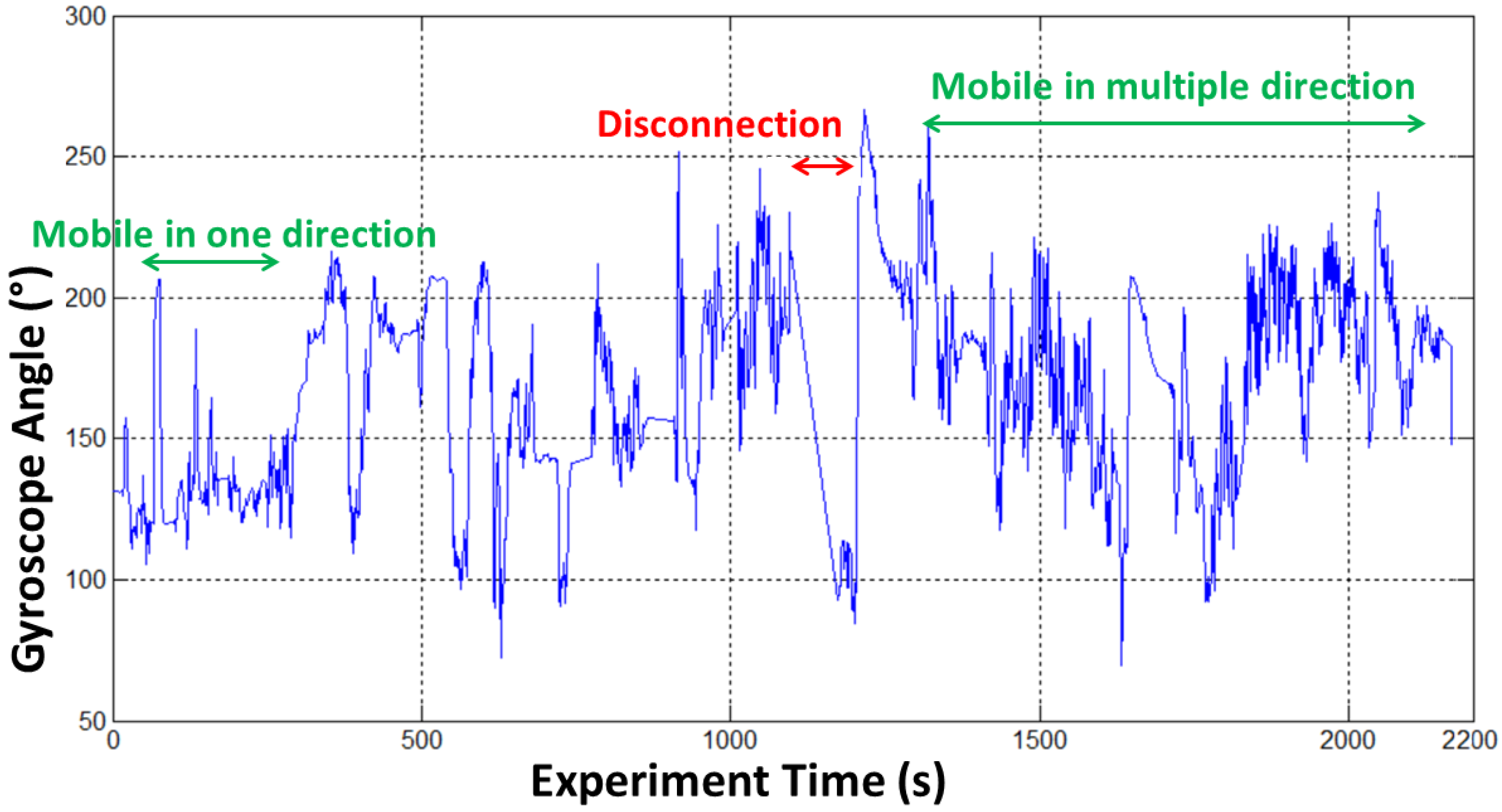
5.2.3. Motion Detection and Link Unavailability Prevention
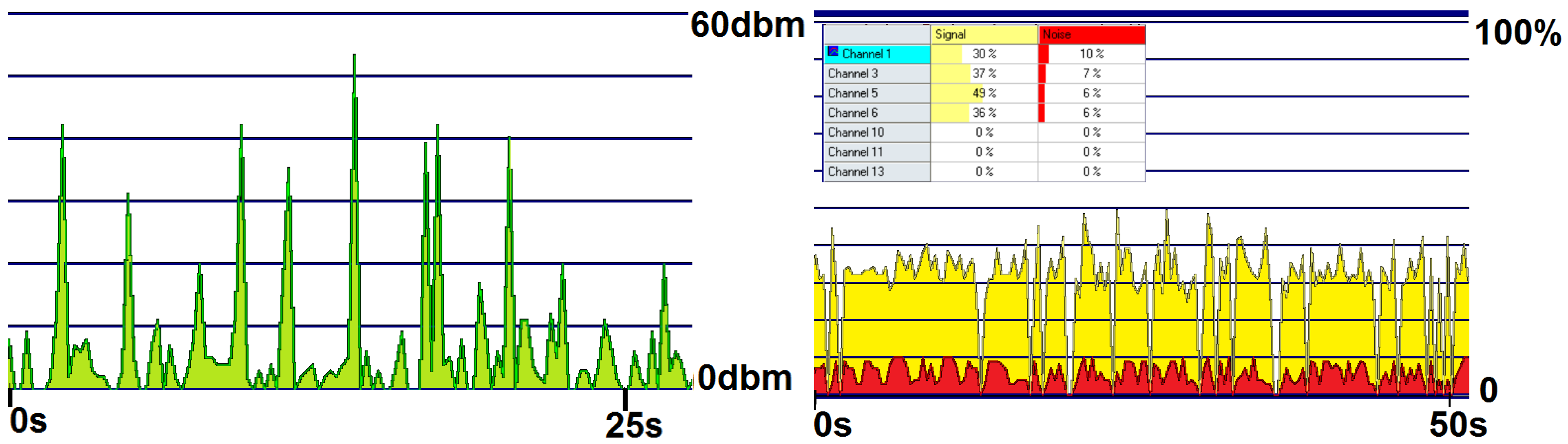
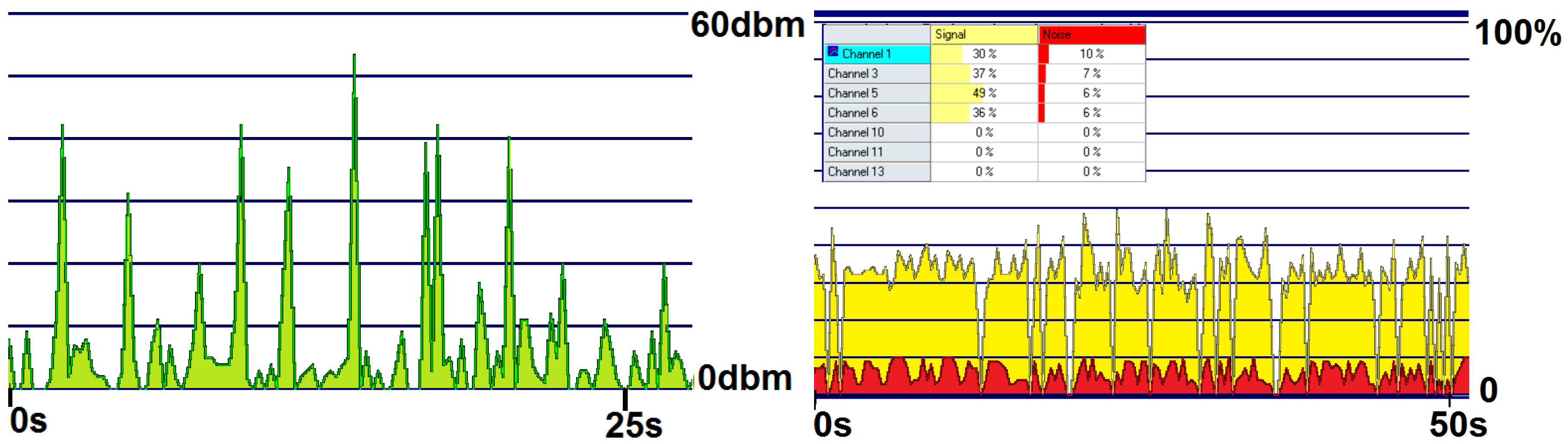
5.2.4. Interference Score and Noise
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| WBAN | Wireless Body Area Networks |
| CROW | Critical and Rescue Operations for Wearable-WSNs |
| End-to-End Link Quality Estimation | |
| End-to-End Delay | |
| RTT | Round Trip Time |
| ORACE-Net | Optimized Routing Approach for Critical and Emergency Networks |
| Labeeb-IoT | an IoT Platform (www.labeeb-iot.com) |
References
- UNISDR. Unisdr—Annual Report; Technical Report; United Nations Office of Disaster Risk Reduction: Geneva, Switzerland, 2015. [Google Scholar]
- Ben Arbia, D.; Alam, M.M.; Attia, R.; Ben Hamida, E. ORACE-Net: A novel multi-hop body-to-body routing protocol for public safety networks. Peer-to-Peer Netw. Appl. 2016, 10, 726–749. [Google Scholar] [CrossRef]
- Ben Arbia, D.; Alam, M.M.; Kadri, A.; Attia, R.; Ben Hamida, E. Implementation and Benchmarking of a Novel Routing Protocol for Tactical Mobile Ad-Hoc Networks. In Proceedings of the 12th IEEE WiMob Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), New York, NY, USA, 17–19 October 2016. [Google Scholar]
- D’Andreagiovanni, F.; Krolikowski, J.; Pulaj, J. A fast hybrid primal heuristic for multiband robust capacitated network design with multiple time periods. Appl. Soft Comput. 2015, 26, 497–507. [Google Scholar] [CrossRef]
- Büsing, C.; D’Andreagiovanni, F. New results about multi-band uncertainty in robust optimization. In Proceedings of the International Symposium on Experimental Algorithms, Bordeaux, France, 7–9 June 2012; Springer: Berlin, Germany, 2012; pp. 63–74. [Google Scholar]
- Bertsekas, D.P. Network Optimization: Continuous and Discrete Models; Athena Scientific Belmont: Belmont, MA, USA, 1998. [Google Scholar]
- Marotta, A.; D’Andreagiovanni, F.; Kassler, A.; Zola, E. On the energy cost of robustness for green virtual network function placement in 5G virtualized infrastructures. Comput. Netw. 2017, in press. [Google Scholar] [CrossRef]
- Bauschert, T.; Busing, C.; D’Andreagiovanni, F.; Koster, A.C.; Kutschka, M.; Steglich, U. Network planning under demand uncertainty with robust optimization. IEEE Commun. Mag. 2014, 52, 178–185. [Google Scholar] [CrossRef]
- Union, I.T. Overview of Disaster Relief Systems, Network Resilience and Recovery; Technical Report; International Telecommunication Union: Geneva, Switzerland, 2014. [Google Scholar]
- Chen, M.; Gonzalez, S.; Vasilakos, A.; Cao, H.; Leung, V.C.M. Body Area Networks: A Survey. Mob. Netw. Appl. 2011, 16, 171–193. [Google Scholar] [CrossRef]
- Gao, T.; Massey, T.; Selavo, L.; Crawford, D.; Chen, B.R.; Lorincz, K.; Shnayder, V.; Hauenstein, L.; Dabiri, F.; Jeng, J.; et al. The advanced health and disaster aid network: A light-weight wireless medical system for triage. IEEE Trans. Biomed. Circuits Syst. 2007, 1, 203–216. [Google Scholar] [CrossRef] [PubMed]
- Negra, R.; Jemili, I.; Belghith, A. Wireless Body Area Networks: Applications and Technologies. Procedia Comput. Sci. 2016, 83, 1274–1281. [Google Scholar] [CrossRef]
- Gomez, K.; Goratti, L.; Rasheed, T.; Reynaud, L. Enabling disaster-resilient 4G mobile communication networks. IEEE Commun. Mag. 2014, 52, 66–73. [Google Scholar] [CrossRef]
- Varun, G.; Menon, J.P.P.; Priya, J. Ensuring Reliable Communication in Disaster Recovery Operations with Reliable Routing Technique. Mob. Inf. Syst. 2016, 2016. [Google Scholar] [CrossRef]
- Lu, Z.; Cao, G.; Porta, T.L. Networking Smartphones for Disaster Recovery. IEEE Trans. Mob. Comput. 2016, PP. [Google Scholar] [CrossRef]
- George, S.M.; Zhou, W.; Chenji, H.; Won, M.; Lee, Y.O.; Pazarloglou, A.; Stoleru, R.; Barooah, P. DistressNet: A wireless ad hoc and sensor network architecture for situation management in disaster response. IEEE Commun. Mag. 2010, 48, 128–136. [Google Scholar] [CrossRef]
- Felice, M.D.; Bedogni, L.; Bononi, L. The Emergency Direct Mobile App: Safety Message Dissemination over a Multi-Group Network of Smartphones Using Wi-Fi Direct. In Proceedings of the MobiWac ’16, 14th ACM International Symposium on Mobility Management and Wireless Access, Malta, 13–17 November 2016; ACM: New York, NY, USA, 2016; pp. 99–106. [Google Scholar]
- Chen, X.; Xu, Y.; Liu, A. Cross Layer Design for Optimizing Transmission Reliability, Energy Efficiency, and Lifetime in Body Sensor Networks. Sensors 2017, 17, 900. [Google Scholar] [CrossRef] [PubMed]
- Tsouri, G.R.; Prieto, A.; Argade, N. On increasing network lifetime in body area networks using global routing with energy consumption balancing. Sensors 2012, 12, 13088–13108. [Google Scholar] [CrossRef] [PubMed]
- D’Andreagiovanni, F.; Nardin, A. Towards the fast and robust optimal design of Wireless Body Area Networks. Appl. Soft Comput. 2015, 37, 971–982. [Google Scholar] [CrossRef]
- D’Andreagiovanni, F.; Nardin, A.; Natalizio, E. A Fast ILP-Based Heuristic for the Robust Design of Body Wireless Sensor Networks. In European Conference on the Applications of Evolutionary Computation, Proceedings of the EvoApplications 2017, 20th European Conference Applications of Evolutionary Computation, Amsterdam, The Netherlands, 19–21 April 2017; Squillero, G., Sim, K., Eds.; Lecture Notes in Computer Science; Part I; Springer: Berlin, Germany, 2017; Volume 10199, pp. 234–250. [Google Scholar]
- Miranda, J.; Cabral, J.; Wagner, S.R.; Fischer Pedersen, C.; Ravelo, B.; Memon, M.; Mathiesen, M. An Open Platform for Seamless Sensor Support in Healthcare for the Internet of Things. Sensors 2016, 16, 2089. [Google Scholar] [CrossRef] [PubMed]
- Ben Hamida, E.; Alam, M.; Maman, M.; Denis, B.; D’Errico, R. Wearable Body-to-Body networks for critical and rescue operations—The CROW2 project. In Proceedings of the 2014 IEEE 25th Annual International Symposium on Personal, Indoor, and Mobile Radio Communication (PIMRC), Washington, DC, USA, 2–5 September 2014; pp. 2145–2149. [Google Scholar]
- Alam, M.M.; Ben Hamida, E. Performance Evaluation of IEEE 802.15.6-based WBANs under Co-Channel Interference. Int. J. Sens. Netw. 2016. [Google Scholar] [CrossRef]
- Alam, M.M.; Ben Hamida, E.; Ben Arbia, D. Joint Throughput and Channel Aware (TCA) Dynamic Scheduling Algorithm for Emerging Wearable Applications. In Proceedings of the 2016 IEEE Wireless Communications and Networking Conference (WCNC), Doha, Qatar, 3–6 April 2016. [Google Scholar]
- Maman, M.; Mani, F.; Denis, B.; D’Errico, R. Evaluation of Multiple Coexisting Body Area Networks Based on Realistic On-Body and Body-to-Body Channel Models. In Proceedings of the 10th International Symposium on Medical Information and Communication Technology (ISMICT’16), Worcester, MA, USA, 20–23 March 2016. [Google Scholar]
- WSNET 3.0 Simulator. Available online: http://wsnet.gforge.inria.fr/ (accessed on 30 November 2015).
- Martínez-Pérez, F.E.; González-Fraga, J.Á.; Cuevas-Tello, J.C.; Rodríguez, M.D. Activity inference for ambient intelligence through handling artifacts in a healthcare environment. Sensors 2012, 12, 1072–1099. [Google Scholar] [CrossRef] [PubMed]
- Information Technology Message Queuing Telemetry Transport (MQTT) v3.1.1; ISO/IEC 20922; ISO/IEC: Geneva, Switzerland, 2016.
- Shimmer Sensing. Available online: http://www.shimmersensing.com/products/ecg-development-kit (accessed on 15 January 2017).
- Burns, A.; Greene, B.R.; McGrath, M.J.; O’Shea, T.J.; Kuris, B.; Ayer, S.M.; Stroiescu, F.; Cionca, V. SHIMMER: A Wireless Sensor Platform for Noninvasive Biomedical Research. IEEE Sens. J. 2010, 10, 1527–1534. [Google Scholar] [CrossRef]
- Qatar Mobility Innovations Center. Labeeb IoT Platform and Solutions; QMIC: Doha, Qatar, 2016. [Google Scholar]
- Chakraborty, C.; Gupta, B.; Ghosh, S.K. A review on telemedicine-based WBAN framework for patient monitoring. Telemed. e-Health 2013, 19, 619–626. [Google Scholar] [CrossRef] [PubMed]
- Al-Madani, B.; Al-Roubaiey, A.; Baig, Z.A. Real-Time QoS-Aware Video Streaming: A Comparative and Experimental Study. Adv. Multimed. 2014, 2014. [Google Scholar] [CrossRef]
- Quality of Service Design Overview. Available online: http://www.ciscopress.com/articles/article.asp?p=357102seqNum=2 (accessed on 20 February 2017).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Protocols and Systems | Wireless Standard | Multi-Hop | Topology Awareness | Infrastructure Dependency | Network Extensibility | Sensing Devices Integration |
|---|---|---|---|---|---|---|
| RRT [14] | N/A | No | No | No | No | N/A |
| DistressNet [16] | ad hoc WiFi | Yes | Yes | No | No | N/A |
| Disaster 4 G [13] | LTE/4G | Yes | Yes | Yes | Yes | N/A |
| Emergency Direct [17] | WiFi Direct | No | Yes | No | No | N/A |
| TeamPhone [15] | ad hoc WiFi/SMS | No | No | Yes | No | N/A |
| CROW2 (this work) | ad hoc WiFi | Yes | Yes | No | Yes | Yes |
| General Settings | |
|---|---|
| Parameter | Setting |
| ORACE-Net Tactical Devices | 4 (Raspberry Pi 2) OS: Raspbian v8.0 |
| Mobile nodes | 2 (Samsung Galaxy S3-I9300, rooted) OS: Android 4.2.2 CyanogenMod 10.0 |
| Wireless mode | Ad hoc |
| ESSID | CROW2 |
| Wireless standard | IEEE 802.11n/2.412 GHz (Channel 1) |
| Transmission power | 0 dBm |
| Experiment area | 30 m × 150 m |
| CC-node connection | Ethernet to Internet Ad hoc WiFi to ORACE-Net network |
| Experimentation duration | 30 min/iteration |
| Power batteries | - Smart phone: 2100 mAh Li-Ion (3.7 v) - Raspberry-Pi: 10,000-mAh Li-ion (12 v) - CC-node: 12 V power supply |
| ORACE-Net Protocol Settings | |
| Application layer | MQTT client used for pushing data to the Labeeb-IoT platform |
| MQTT msgsize/intervals | 30 Kb/1 s |
| Hello/ADV packet size | 20/25 bytes |
| Hello/ADV intervals | 3 s |
| Multicast address/port | 224.0.0.0/10000 |
| Shimmer Sensing Settings [30] | |
| Wireless standard | Bluetooth IEEE 802.15.1 |
| Sensed data | Pressure, Temperature, Gyroscope (x, y, zaxis-angle), acceleration (x, y, z), magnetometer (x, y, z), battery level |
| Device/Body | 1 (with multiple sensors) |
| Buffer [31] | 1024 bytes |
| Message interval | 1 s |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ben Arbia, D.; Alam, M.M.; Kadri, A.; Ben Hamida, E.; Attia, R. Enhanced IoT-Based End-To-End Emergency and Disaster Relief System. J. Sens. Actuator Netw. 2017, 6, 19. https://doi.org/10.3390/jsan6030019
Ben Arbia D, Alam MM, Kadri A, Ben Hamida E, Attia R. Enhanced IoT-Based End-To-End Emergency and Disaster Relief System. Journal of Sensor and Actuator Networks. 2017; 6(3):19. https://doi.org/10.3390/jsan6030019
Chicago/Turabian StyleBen Arbia, Dhafer, Muhammad Mahtab Alam, Abdullah Kadri, Elyes Ben Hamida, and Rabah Attia. 2017. "Enhanced IoT-Based End-To-End Emergency and Disaster Relief System" Journal of Sensor and Actuator Networks 6, no. 3: 19. https://doi.org/10.3390/jsan6030019
APA StyleBen Arbia, D., Alam, M. M., Kadri, A., Ben Hamida, E., & Attia, R. (2017). Enhanced IoT-Based End-To-End Emergency and Disaster Relief System. Journal of Sensor and Actuator Networks, 6(3), 19. https://doi.org/10.3390/jsan6030019