On-Line RSSI-Range Model Learning for Target Localization and Tracking


Abstract
1. Introduction
2. Related Work
3. On-Line RSSI-Range Training Problem Formulation
4. On-Line Training Using Inter-Anchor RSSI Measurements
4.1. Inter-Anchor RSSI-Range Model Training
4.2. Outlier Rejection
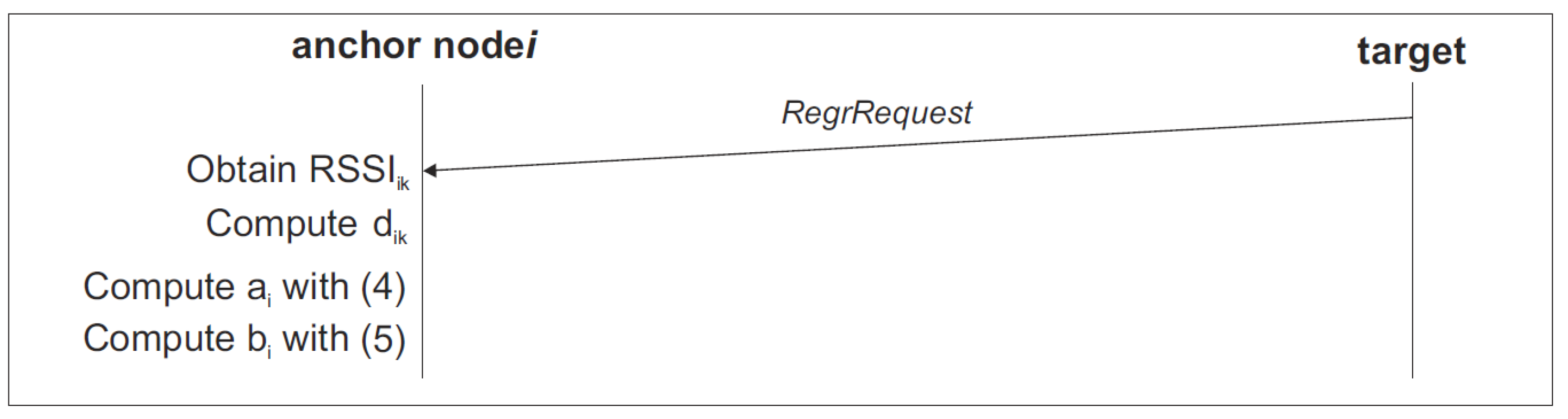
5. On-Line Training Using Target-Anchor RSSI Measurements
5.1. Target-Anchor RSSI-Range Model Fitting
5.2. RSSI-Range Model Update
6. Experimental Section
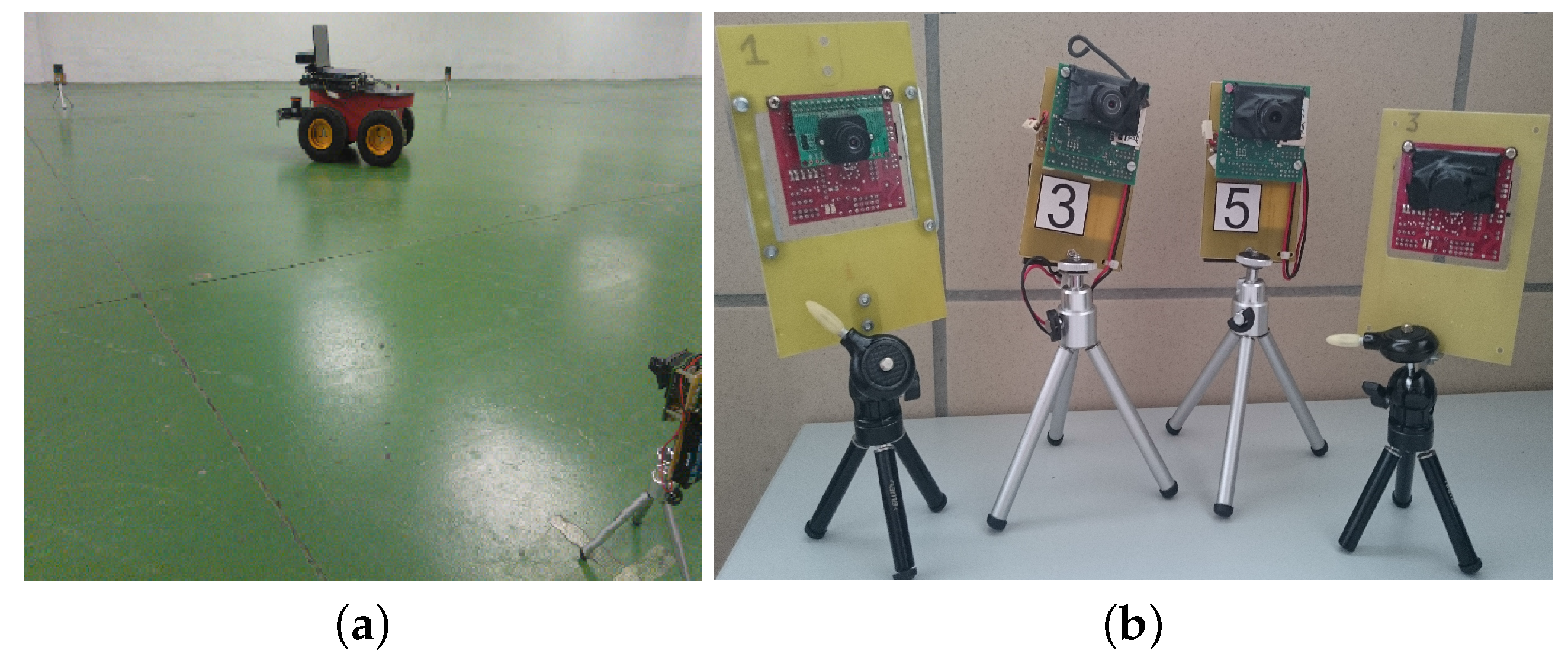
6.1. The UBILOC Testbed
6.2. Proof of Concept
6.3. Evaluation and Comparison
6.4. Discussion
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A. Derivation of RSSI-Models
References
- Baccour, N.; Koubaa, A.; Mottola, L.; Zuniga, M.A.; Youssef, H.; Boano, C.A.; Alves, M. Radio link quality estimation in wireless sensor networks: A survey. ACM Trans. Sens. Netw. 2012, 8, 34:1–34:33. [Google Scholar] [CrossRef]
- Wang, X.; Bischoff, O.; Laur, R.; Paul, S. Localization in Wireless ad-hoc Sensor Networks using multilateration with RSSI for logistic applications. Procedia Chem. 2009, 1, 461–464. [Google Scholar] [CrossRef]
- Savvides, A.; Han, C.; Strivastava, M. Dynamic fine-grained localization in ad-hoc Networks of Sensors. In Proceedings of the International Conference on Mobile Computing and Networking, Rome, Italy, 16–21 July 2001; pp. 166–179. [Google Scholar]
- Benkic, K.; Malajner, M.; Planinsic, P.; Cucej, Z. Using RSSI value for distance estimation in wireless sensor networks based on ZigBee. In Proceedings of the 15th International Conference on Systems, Signals and Image Processing (IWSSIP’2008), Bratislava, Slovak Republic, 25–28 June 2008; pp. 303–306. [Google Scholar]
- Zhang, J.; Zhang, L. Research on distance measurement based on RSSI of ZigBee. In Proceedings of the International Colloquium on Computing, Communication, Control, and Management (CCCM’2009), Sanya, China, 8–9 August 2009; Volume 3, pp. 210–212. [Google Scholar]
- Liu, C.; Wu, K.; He, T. Sensor localization with ring overlapping based on comparison of received signal strength indicator. In Proceedings of the IEEE International Conference on Mobile Ad-hoc and Sensor Systems, Fort Lauderdale, FL, USA, 25–27 October 2004; pp. 516–518. [Google Scholar]
- He, T.; Huang, C.; Blum, B.M.; Stankovic, J.A.; Abdelzaher, T. Range-free localization schemes for large scale Sensor Networks. In Proceedings of the International Conference on Mobile Computing and Networking, San Diego, CA, USA, 14–19 September 2003; pp. 81–95. [Google Scholar]
- Bahl, P.; Padmanabhan, V.N. RADAR: An in-building RF-based user location and tracking system. In Proceedings of the Annual Joint Conference of the IEEE Computer and Communications Societies (INFOCOM’2000), Tel Aviv, Israel, 26–30 March 2000; pp. 775–784. [Google Scholar]
- Smailagic, A.; Kogan, D. Location sensing and privacy in a context-aware computing environment. IEEE Wirel. Commun. 2002, 9, 10–17. [Google Scholar] [CrossRef]
- Youssef, M.A.; Agrawala, A.; Shankar, A.U.; Noh, S.H. A Probabilistic Clustering-Based Indoor Location Determination System; Technical Reports; UMIACS: College Park, MD, USA, 2002. [Google Scholar]
- Roos, T.; Myllymäki, P.; Tirri, H.; Misikangas, P.; Sievänen, J. A probabilistic approach to WLAN user location estimation. Int. J. Wirel. Inf. Netw. 2002, 9, 155–164. [Google Scholar] [CrossRef]
- Hassan-Ali, M.; Pahlavan, K. Site-specific wideband and narrowband modeling of indoor radio channel using ray-tracing. In Proceedings of the Personal, Indoor and Mobile Radio Communications (PIMRC’98), Boston, MA, USA, 8–11 September 1998; pp. 65–68. [Google Scholar]
- Hassan-Ali, M.; Pahlavan, K. A new statistical model for site-specific indoor radio propagation prediction based on geometric optics and geometric probability. IEEE Trans. Wirel. Commun. 2002, 1, 112–124. [Google Scholar] [CrossRef]
- Awad, A.; Frunzke, T.; Dressler, F. Adaptive distance estimation and localization in WSN using RSSI measures. In Proceedings of the Conference Digital System Design Architectures, Methods and Tools (DSD’2007), Lubeck, Germany, 29–31 August 2007; pp. 471–478. [Google Scholar]
- Vanheel, F.; Verhaevert, J.; Laermans, E.; Moerman, I.; Demeester, P. Automated linear regression tools improve rssi wsn localization in multipath indoor environment. EURASIP J. Wirel. Commun. Netw. 2011, 2011, 1–27. [Google Scholar] [CrossRef]
- Mihaylova, L.; Angelova, D.; Bull, D.R.; Canagarajah, N. Localization of Mobile Nodes in Wireless Networks with Correlated in Time Measurement Noise. IEEE Trans. Mob. Comput. 2011, 10, 44–53. [Google Scholar] [CrossRef]
- Patwari, N.; Hero, A.O.; Perkins, M.; Correal, N.S.; O’dea, R.J. Relative location estimation in wireless sensor networks. IEEE Trans. Sig. Process. 2003, 51, 2137–2148. [Google Scholar] [CrossRef]
- Itoh, K.-I.; Watanabe, S.; Shih, J.-S.; Sato, T. Performance of handoff algorithm based on distance and RSSI measurements. IEEE Trans. Veh. Technol. 2002, 51, 1460–1468. [Google Scholar] [CrossRef]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: a paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- De San Bernabé, A.; Martínez-de Dios, J.R.; Ollero, A. Efficient cluster-based tracking mechanisms for camera-based wireless sensor networks. IEEE Trans. Mob. Comput. 2015, 14, 1820–1832. [Google Scholar] [CrossRef]
- Sánchez-Matamoros, J.M.; Martínez-de Dios, J.R.; Ollero, A. Cooperative localization and tracking with a camera-based WSN. In Proceedings of the International Conference on Mechatronics (ICM2009), Malaga, Spain, 14–17 April 2009; pp. 1–6. [Google Scholar]
- Jiménez-González, A.; Martínez-de Dios, J.R.; Ollero, A. An integrated testbed for heterogeneous mobile robots and other cooperating objects. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010. [Google Scholar]
- Jiménez-González, A.; Martínez-de Dios, J.R.; Ollero, A. An integrated testbed for cooperative perception with heterogeneous mobile and static sensors. Sensors 2011, 11, 11516–11543. [Google Scholar] [CrossRef] [PubMed]
- Rowe, A. CMUcam3 Datasheet. 2012. Available online: http://www.cmucam.org/ (accessed on 9 August 2017).
- Fox, D.; Burgard, W.; Dellaert, F.; Thrun, S. Monte carlo localization: Efficient position estimation for mobile robots. In Proceedings of the AAAI/IAAI, Orlando, FL, USA, 18–22 July 1999; pp. 343–349. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
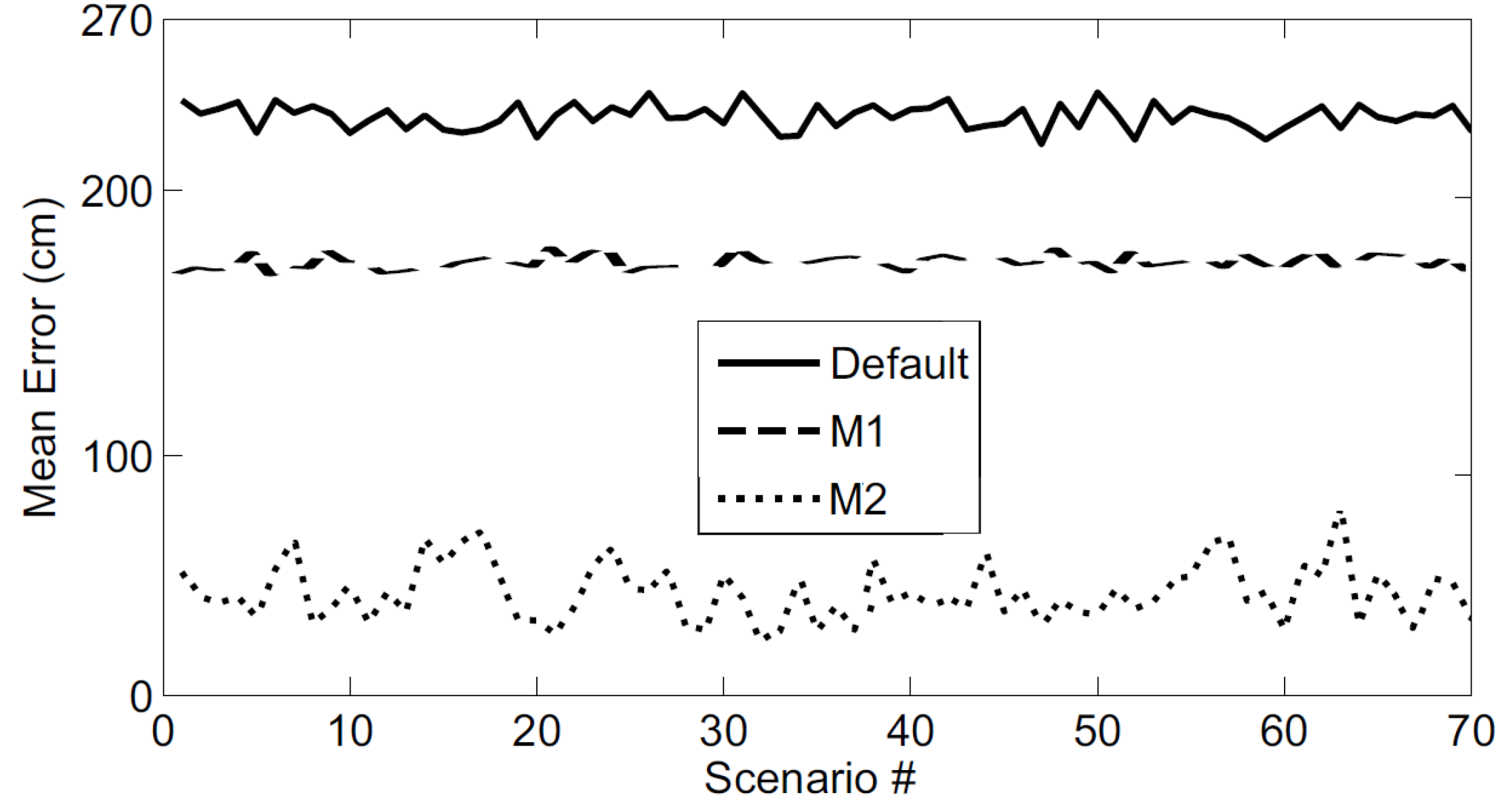
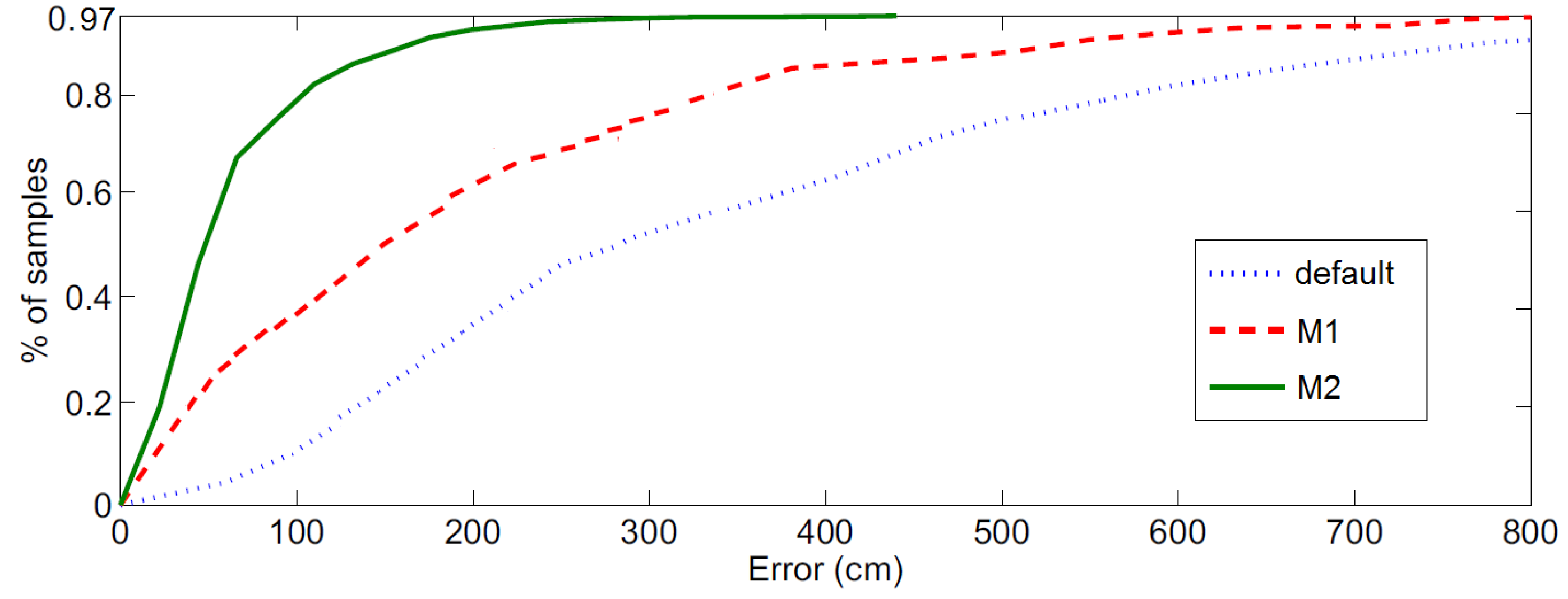
| Default | M1 | M2 | |
|---|---|---|---|
| Average localization error (m) | 2.32 | 1.89 | 0.53 |
| Average time cameras are active (% of the experiment time) | 0 | 0 | 11.5% |
| Average sensor node energy consumption (mW) | 66 | 66 | 140.75 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ramiro Martínez-de Dios, J.; Ollero, A.; Fernández, F.J.; Regoli, C. On-Line RSSI-Range Model Learning for Target Localization and Tracking. J. Sens. Actuator Netw. 2017, 6, 15. https://doi.org/10.3390/jsan6030015
Ramiro Martínez-de Dios J, Ollero A, Fernández FJ, Regoli C. On-Line RSSI-Range Model Learning for Target Localization and Tracking. Journal of Sensor and Actuator Networks. 2017; 6(3):15. https://doi.org/10.3390/jsan6030015
Chicago/Turabian StyleRamiro Martínez-de Dios, José, Anibal Ollero, Francisco José Fernández, and Carolina Regoli. 2017. "On-Line RSSI-Range Model Learning for Target Localization and Tracking" Journal of Sensor and Actuator Networks 6, no. 3: 15. https://doi.org/10.3390/jsan6030015
APA StyleRamiro Martínez-de Dios, J., Ollero, A., Fernández, F. J., & Regoli, C. (2017). On-Line RSSI-Range Model Learning for Target Localization and Tracking. Journal of Sensor and Actuator Networks, 6(3), 15. https://doi.org/10.3390/jsan6030015