
An Experimental Comparison of Radio Transceiver and Transceiver-Free Localization Methods

Abstract
:
1. Introduction
2. Localization Methods
2.1. Problem Statement
2.2. Transceiver-Based Localization
2.2.1. Model
2.2.2. 2D MLE Algorithm
2.2.3. AGAPE Algorithm
2.3. Transceiver-Free Localization
2.3.1. Model
2.3.2. RTI Algorithms
3. Experiments
3.1. Experiment Campaigns
- Experiment 1: The first experiment was performed in a 6.4 m by 6.4 m area outside the Merrill Engineering Building of the University of Utah. The area is surrounded by 28 TelosB nodes deployed at known locations near trees and 3 m away from the building wall. A person worn a TelosB node in the middle of his chest and walked around a marked path at a constant speed of about 0.5 m/s. This outdoor experiment dataset was first reported in [9], and details can be found there.
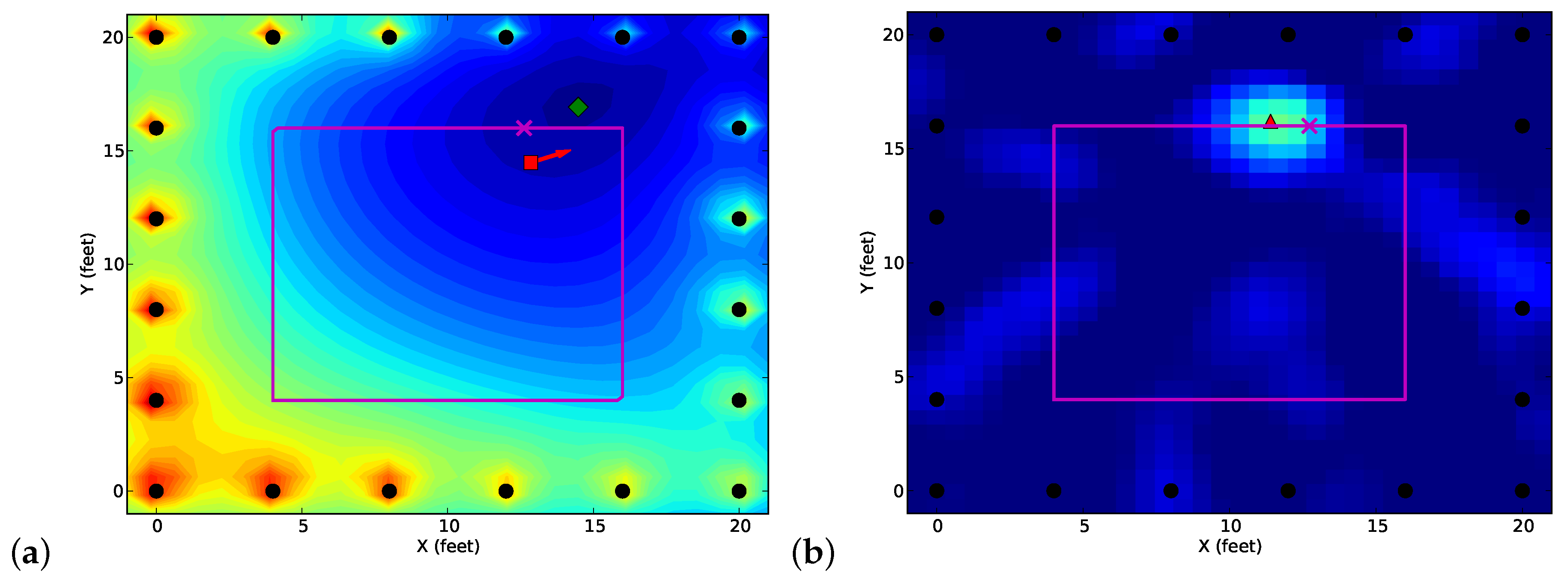
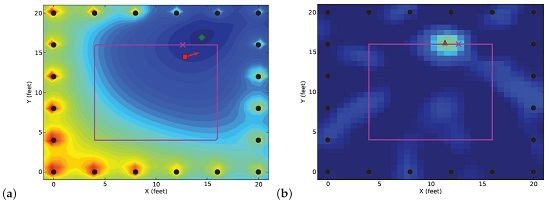
- Experiment 2: The second experiment was an indoor experiment performed inside the Warnock Engineering Building of the University of Utah. A 6.1 m by 6.1 m area was surrounded by 20 TelosB nodes with an interdistance of 0.91 m (3 feet) between each two anchor nodes. A person wearing a TelosB node walked clockwise twice around a 2.7 m by 2.7 m square, as shown as the purple line in Figure 2. The experiment was performed in the building lounge area, during which students occasionally walked outside the peripheral area of the sensor network. This experiment is first reported by this paper.
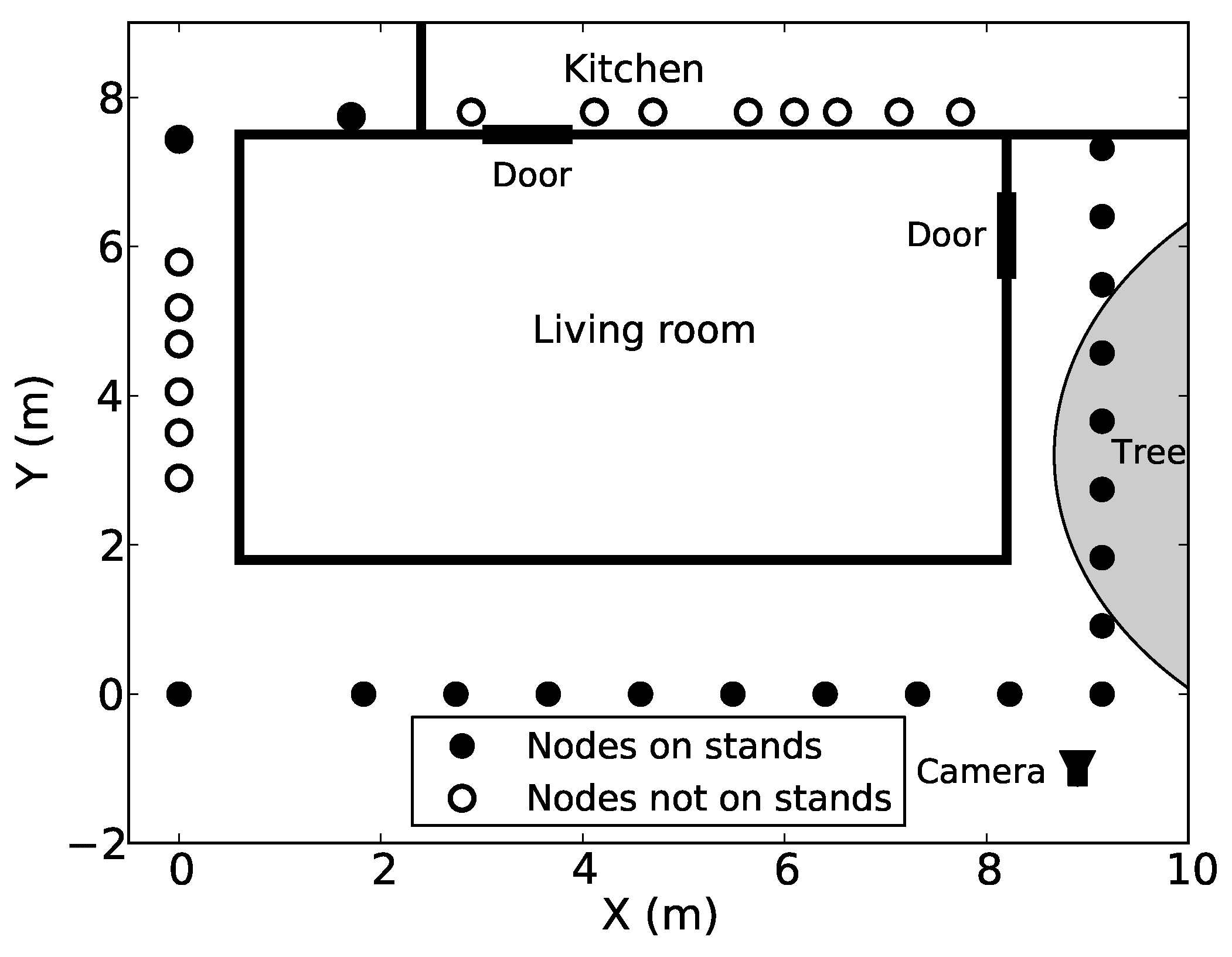
- Experiment 3: The third experiment was a through-wall experiment, in which 34 TelosB nodes were deployed outside the living room of a residential house, as shown in Figure 1. A person wearing a transmitter walked four times around a 3.6 m by 3.6 m square in the living room. The experiment was performed in a dynamic environment, where wind caused tree branches and leaves to sway and introduced instrinsic noise [21] to the experiment. This experiment was performed by [21], but the transceiver-based experimental dataset is first reported in this paper.
3.2. Network Testbed and Experiment Procedure
4. Experimental Results
4.1. Metrics
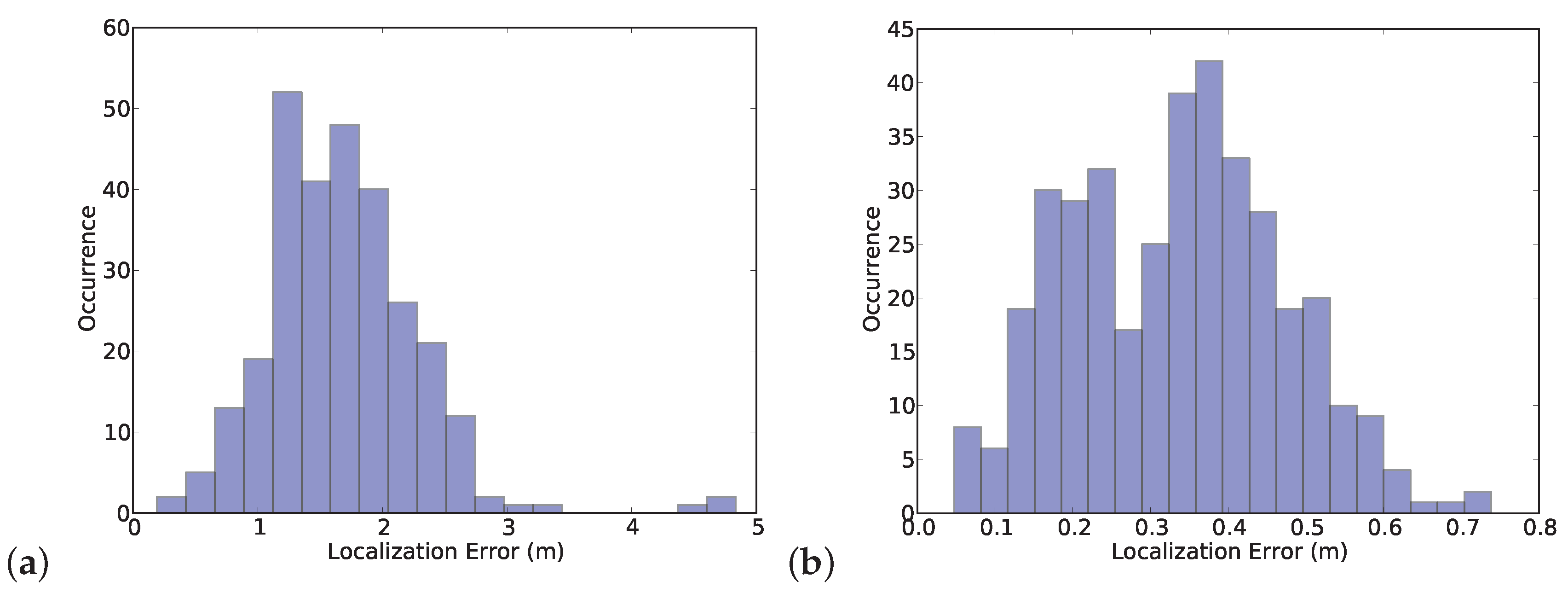
4.2. Results
4.2.1. Transceiver Localization Results
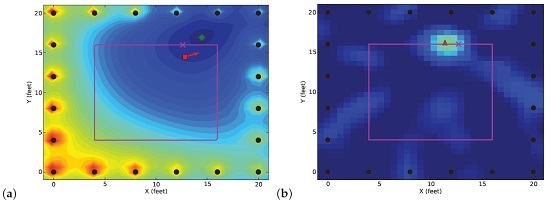
4.2.2. Transceiver-Free Localization Results
4.3. Comparison and Discussion
Author Contributions
Conflicts of Interest
References
- Mao, G.; Fidan, B.; Anderson, B.D.O. Wireless sensor network localization techniques. Comput. Netw. 2007, 51, 2529–2553. [Google Scholar] [CrossRef]
- Patwari, N.; Ash, J.; Kyperountas, S.; Moses, R.M.; Hero, A.O., III; Correal, N.S. Locating the Nodes: Cooperative Localization in Wireless Sensor Networks. IEEE Signal Process. 2005, 22, 54–69. [Google Scholar] [CrossRef]
- Woyach, K.; Puccinelli, D.; Haenggi, M. Sensorless Sensing in Wireless Networks: Implementation and Measurements. Second International Workshop on Wireless Network Measurement (WiNMee’06). 2006. Available online: http://www.nd.edu/mhaenggi/pubs/winmee06.pdf (accessed on 13 August 2016).
- Wilson, J.; Patwari, N. Radio Tomographic Imaging With Wireless Networks. IEEE Trans. Mob. Comput. 2010, 9, 621–632. [Google Scholar] [CrossRef]
- Bahl, P.; Padmanabhan, V.N. RADAR: An in-building RF-based user location and tracking system. In Proceedings of the IEEE INFOCOM 2000, Tel Aviv, Israel, 26–30 March 2000; Volume 2, pp. 775–784.
- Roos, T.; Myllymki, P.; Tirri, H.; Misikangas, P.; Sievnen, J. A probabilistic approach to WLAN user location estimation. Int. J. Wirel. Inf. Netw. 2002, 9, 155–164. [Google Scholar] [CrossRef]
- Patwari, N.; Hero, A.O., III; Perkins, M.; Correal, N.; O’Dea, R.J. Relative Location Estimation in Wireless Sensor Networks. IEEE Trans. Signal Process. 2003, 51, 2137–2148. [Google Scholar] [CrossRef]
- Rappaport, T.S. Wireless Communications: Principles and Practice; Prentice-Hall Inc.: Upper Saddle River, NJ, USA, 1996. [Google Scholar]
- Zhao, Y.; Patwari, N.; Agrawal, P.; Rabbat, M. Directed by Directionality: Benefiting from the Gain Pattern of Active RFID Badges. IEEE Trans. Mob. Comput. 2012, 11, 865–877. [Google Scholar] [CrossRef]
- Zhang, D.; Ma, J.; Chen, Q.; Ni, L.M. An RF-based system for tracking transceiver-free objects. In Proceedings of the IEEE PerCom’07, White Plains, NY, USA, 19–23 March 2007; pp. 135–144.
- Youssef, M.; Mah, M.; Agrawala, A. Challenges: Device-free passive localization for wireless environments. In Proceedings of the MobiCom ’07: ACM Int’l Conf. Mobile Computing and Networking, New York, NY, USA, 9–14 September 2007; pp. 222–229.
- Patwari, N.; Agrawal, P. Effects of Correlated Shadowing: Connectivity, Localization, and RF Tomography. In Proceedings of the IEEE/ACM Int’l Conference on Information Processing in Sensor Networks (IPSN’08), St. Louis, Missouri, USA, 22–24 April 2008.
- Xu, C.; Firner, B.; Zhang, Y.; Howard, R.; Li, J.; Lin, X. Improving RF-based device-free passive localization in cluttered indoor environments through probabilistic classification methods. In Proceedings of the 2012 ACM/IEEE 11th International Conference on Information Processing in Sensor Networks (IPSN), Beijing, China, 16–19 April 2012; pp. 209–220.
- Seifeldin, M.; Saeed, A.; Kosba, A.E.; El-Keyi, A.; Youssef, M. Nuzzer: A Large-Scale Device-Free Passive Localization System for Wireless Environments. IEEE Trans. Mob. Comput. 2013, 12, 1321–1334. [Google Scholar] [CrossRef]
- Wilson, J.; Patwari, N. See-Through Walls: Motion Tracking Using Variance-Based Radio Tomography Networks. IEEE Trans. Mob. Comput. 2011, 10, 612–621. [Google Scholar] [CrossRef]
- Zhao, Y.; Patwari, N. Noise Reduction for Variance-Based Device-Free Localization and Tracking. In Proceedings of the 8th IEEE Conference on Sensor, Mesh and Ad Hoc Communications and Networks (SECON’11), Salt Lake City, UT, USA, 27–30 June 2011.
- Kaltiokallio, O.; Bocca, M.; Patwari, N. Enhancing the accuracy of radio tomographic imaging using channel diversity. In Proceedings of the 2012 IEEE 9th International Conference on Mobile Adhoc and Sensor Systems (MASS), Las Vegas, NV, USA, 8–11 October 2012; pp. 254–262.
- Edelstein, A.; Rabbat, M. Background Subtraction for Online Calibration of Baseline RSS in RF Sensing Networks. IEEE Trans. Mob. Comput. 2013, 12, 2386–2398. [Google Scholar] [CrossRef]
- Zheng, Y.; Men, A. Through-wall tracking with radio tomography networks using foreground detection. In Proceedings of the 2012 IEEE Wireless Communications and Networking Conference (WCNC), Paris, France, 1–4 April 2012; pp. 3278–3283.
- Bocca, M.; Luong, A.; Patwari, N.; Schmid, T. Dial it in: Rotating RF sensors to enhance radio tomography. In Proceedings of the Eleventh Annual IEEE International Conference on Sensing, Communication, and Networking, SECON 2014, Singapore, 30 June–3 July 2014; pp. 600–608.
- Zhao, Y.; Patwari, N. Robust Estimators for Variance-Based Device-Free Localization and Tracking. IEEE Trans. Mob. Comput. 2015, 14, 2116–2129. [Google Scholar] [CrossRef]
- Bocca, M.; Kaltiokallio, O.; Patwari, N.; Venkatasubramanian, S. Multiple Target Tracking with RF Sensor Networks. IEEE Trans. Mob. Comput. 2013, 13, 1787–1800. [Google Scholar] [CrossRef]
- Ladd, A.; Bekris, K.; Marceau, G.; Rudys, A.; Kavraki, L.; Wallach, D. Robotics-based location sensing using wireless ethernet. In Proceedings of the Conference on Mobile Computing and Networking (MOBICOM 2002), Atlanta, GA, USA, 23–28 September 2002; pp. 227–238.
- Memsic TelosB Datasheet. Available online: www.memsic.com/userfiles/files/Datasheets/WSN/telosb_datasheet.pdf (accessed on 12 August 2016).
- Sensing and Processing Across Networks (SPAN) Lab, Data and Tools Website. Available online: http://span.ece.utah.edu/data-and-tools (accessed on 12 August 2016).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiment | Model Parameters | 2D MLE | AGAPE | RTI | VRTI | SubVRT | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| RMSE | std | RMSE | std | RMSE | std | RMSE | std | RMSE | std | |||
| Experiment 1 | 1.67 | 48.6 | 2.64 | n/a | 0.87 | n/a | 0.41 | 0.12 | 0.62 | 0.24 | 0.61 | 0.25 |
| Experiment 2 | 2.28 | 19.8 | 1.86 | 0.78 | 1.69 | 0.60 | 0.33 | 0.14 | 0.74 | 0.33 | 0.72 | 0.32 |
| Experiment 3 | 3.22 | 30.5 | 2.10 | 0.77 | 2.05 | 0.78 | n/a | n/a | 1.89 | 0.43 | 0.77 | 0.38 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.; Patwari, N. An Experimental Comparison of Radio Transceiver and Transceiver-Free Localization Methods. J. Sens. Actuator Netw. 2016, 5, 13. https://doi.org/10.3390/jsan5030013
Zhao Y, Patwari N. An Experimental Comparison of Radio Transceiver and Transceiver-Free Localization Methods. Journal of Sensor and Actuator Networks. 2016; 5(3):13. https://doi.org/10.3390/jsan5030013
Chicago/Turabian StyleZhao, Yang, and Neal Patwari. 2016. "An Experimental Comparison of Radio Transceiver and Transceiver-Free Localization Methods" Journal of Sensor and Actuator Networks 5, no. 3: 13. https://doi.org/10.3390/jsan5030013
APA StyleZhao, Y., & Patwari, N. (2016). An Experimental Comparison of Radio Transceiver and Transceiver-Free Localization Methods. Journal of Sensor and Actuator Networks, 5(3), 13. https://doi.org/10.3390/jsan5030013