
Multi-Feature Fusion for Estimating Above-Ground Biomass of Potato by UAV Remote Sensing



Abstract
1. Introduction
2. Results
2.1. Correlation Analysis Between Remote Sensing Features and AGB
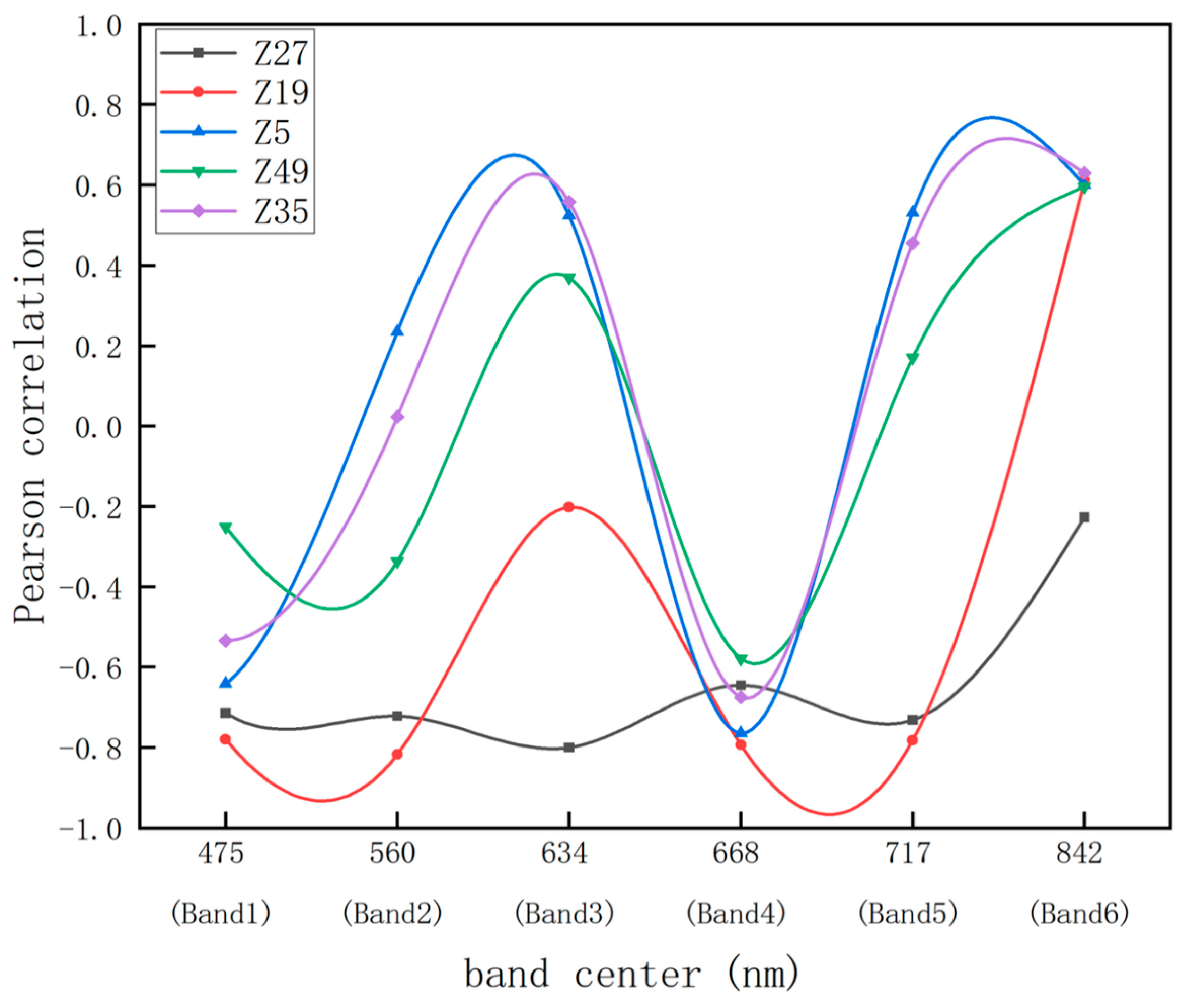
2.1.1. Relationship Between AGB and Spectral Reflectance
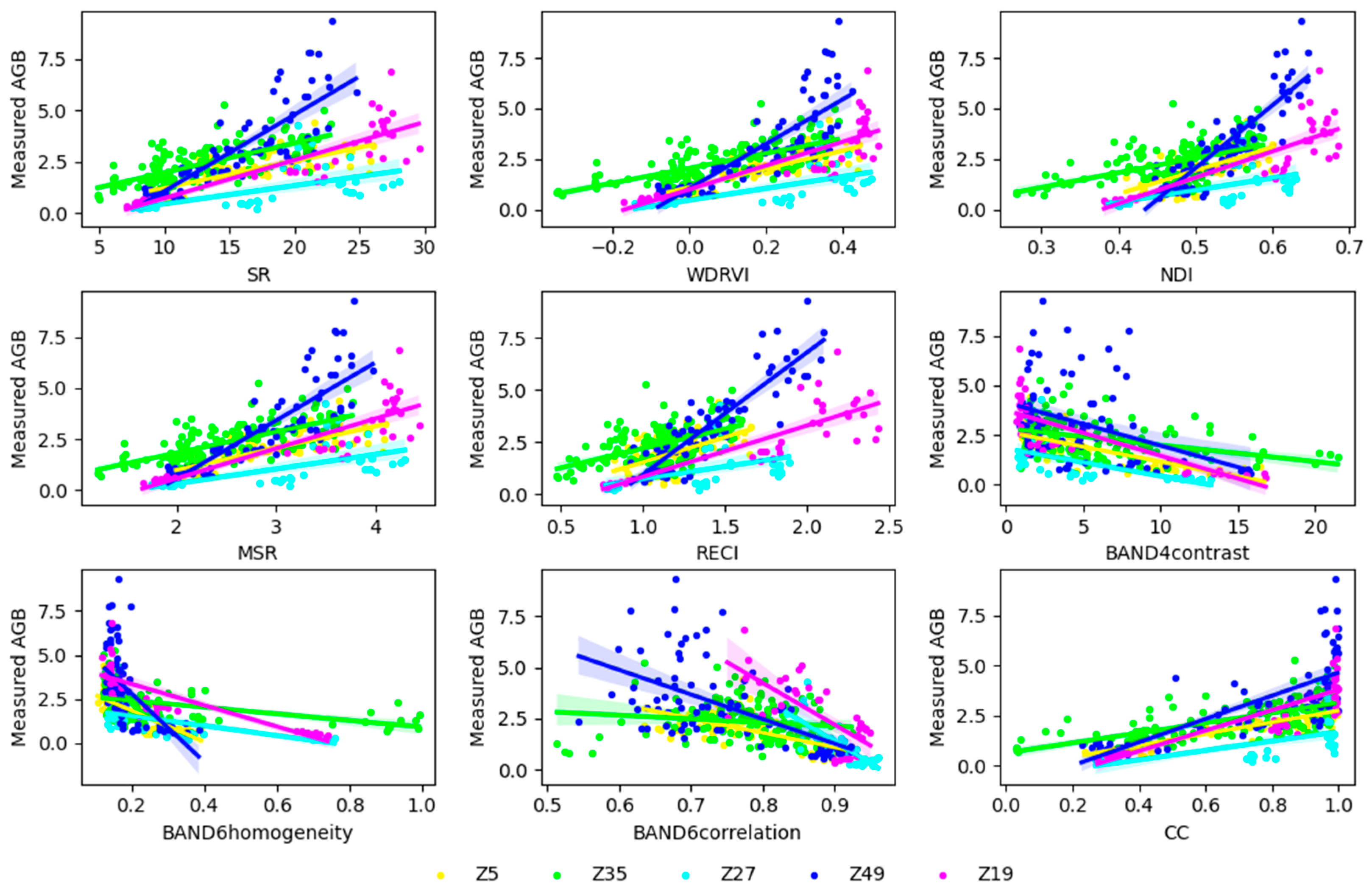
2.1.2. Relationship Between AGB and VIs
2.2. Estimation of Biomass Based on Single-Type Features
2.2.1. AGB Estimation Using Features Selected by Boruta
2.2.2. AGB Estimation Using Features Selected by Correlation Coefficient
2.2.3. Analysis of Optimal Results for Single Feature Modeling
2.3. Biomass Estimation Using Multi-Feature Fusion
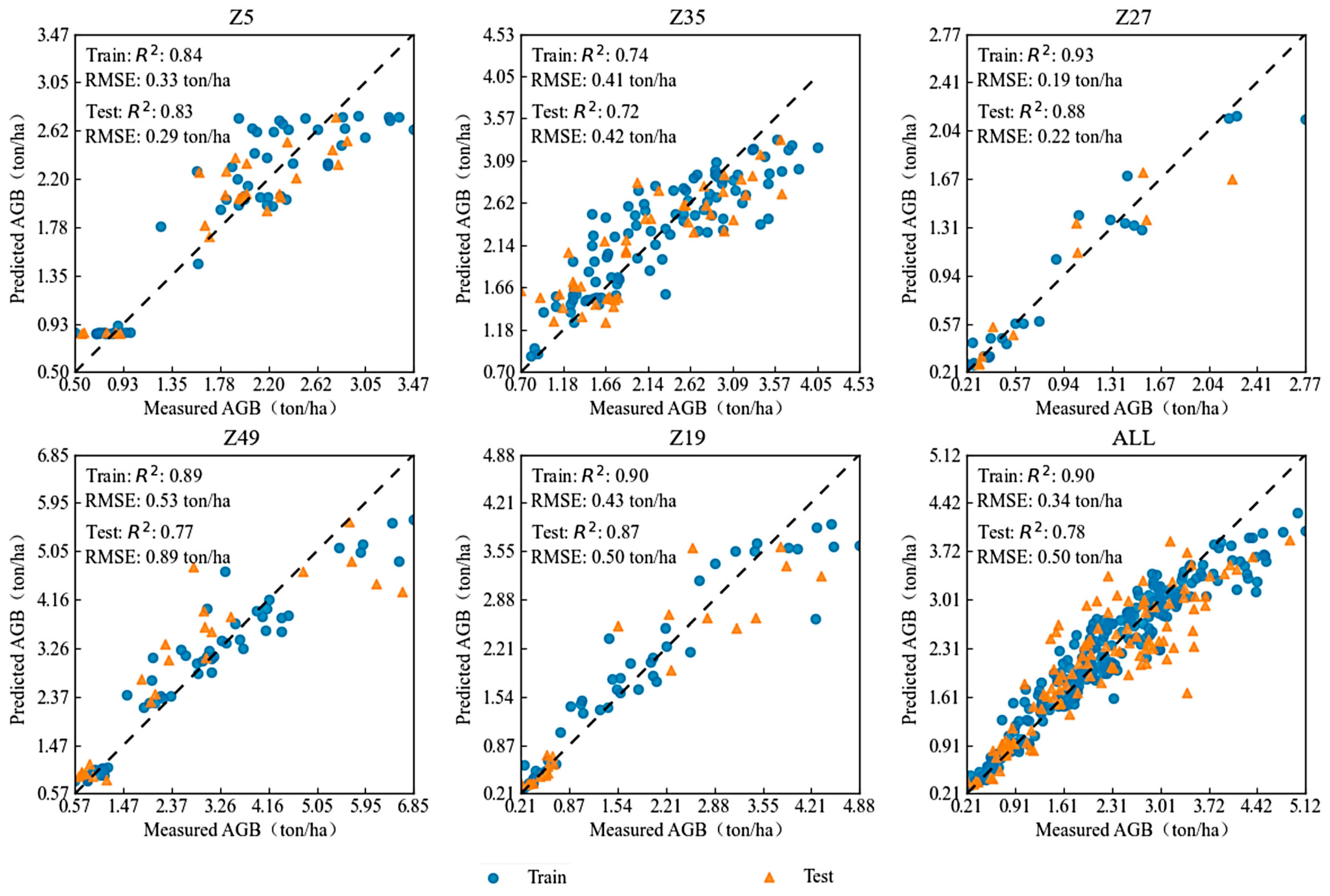
2.3.1. AGB Estimation Based on Boruta-Selected Features
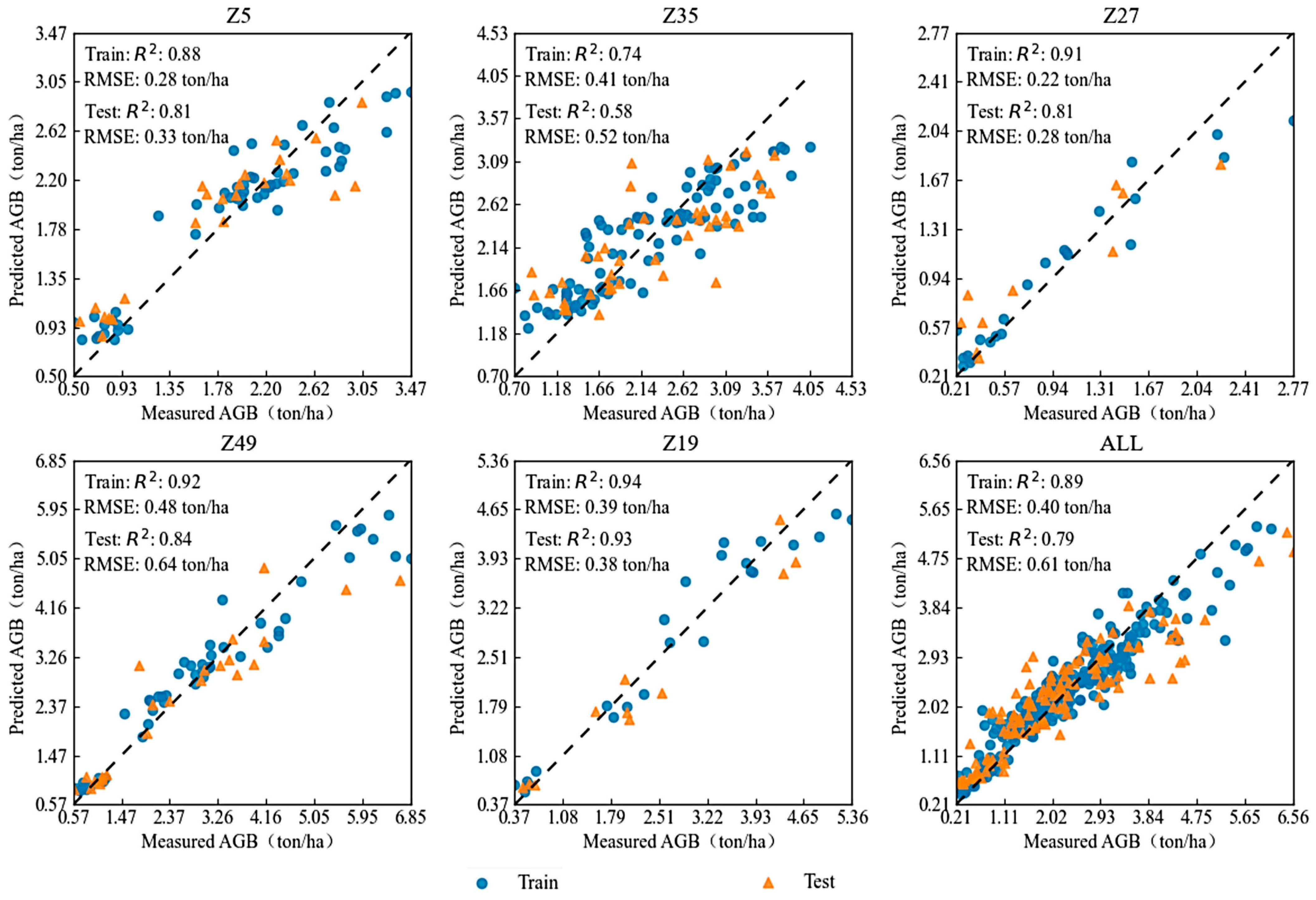
2.3.2. AGB Estimation Based on Correlation Coefficient Filtered Features
2.3.3. Analysis of Optimal Results for Multi-Feature Modeling
2.4. The Impact of Different Feature Selection Methods on AGB Estimation
3. Discussion
3.1. Multi-Feature Fusion for Crop AGB Prediction
3.2. Evaluation of GPR Application in AGB Prediction
3.3. Impact of Different Modeling Algorithms and Feature Selection Methods on AGB Prediction
4. Materials and Methods
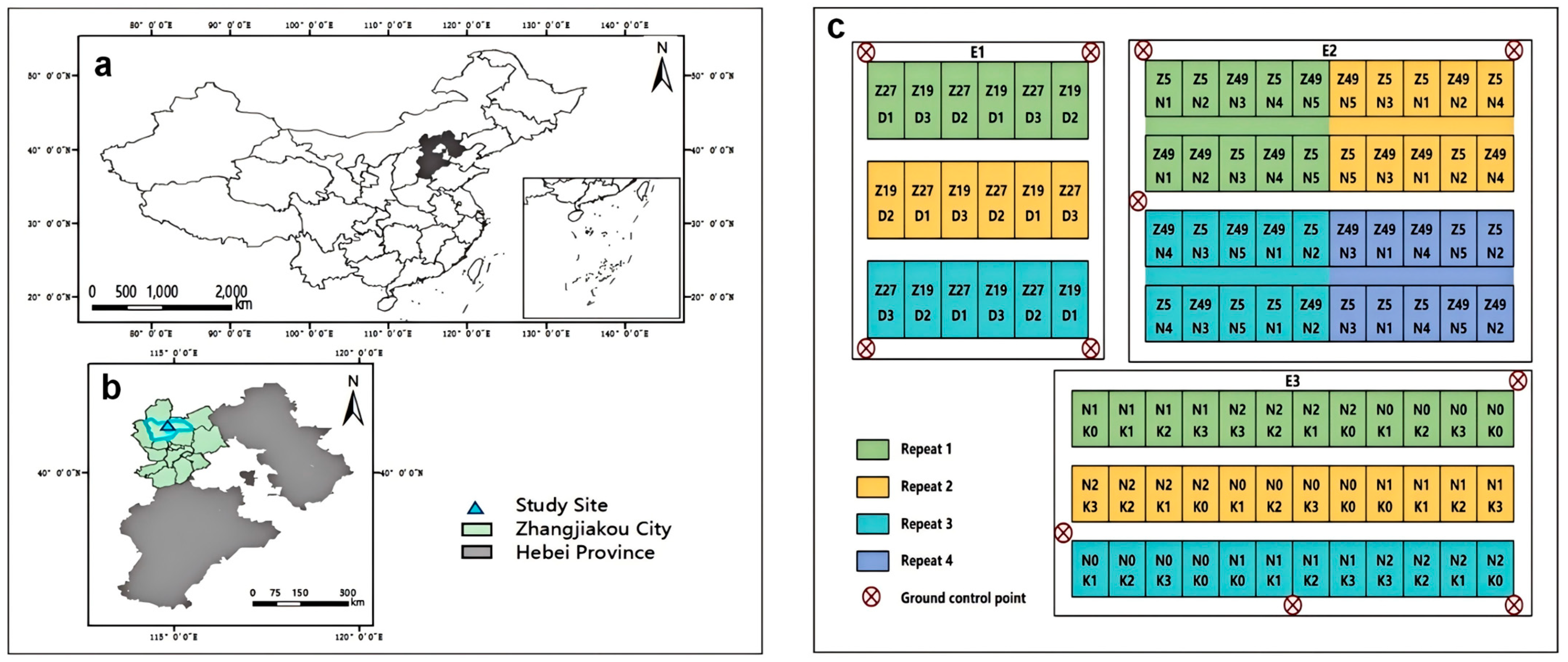
4.1. Test Site
4.2. Experimental Design
4.3. Data Collection
4.3.1. Ground Data Acquisition and Processing
4.3.2. Meteorological Data Acquisition and Collection
4.3.3. UAV Data Acquisition and Processing
4.4. Analysis of UAV Remote Sensing Image Information
4.4.1. Extracting Vegetation Indices
4.4.2. Extracting Texture Features
4.4.3. Extraction of Canopy Structure Information
4.5. Quantification of Growth Process Ratio
4.6. Modeling Method
4.6.1. Feature Selection Methods
- (1)
- Feature selection based on Boruta
- (2)
- Feature selection based on Pearson correlation coefficient (r)
4.6.2. Model Algorithm
4.7. Evaluation Indicators
5. Conclusions
- The relationship between AGB and spectral features shows significant differences among different potato varieties. Compared to single feature modeling, integrating VIs, CC, GDD, and GPR results in a higher estimation accuracy of AGB throughout the entire growth period of potatoes.
- The newly proposed variety-dependent indicator, growth process ratio (GPR), can improve model accuracy by over 20%.
- The RF model using the Boruta feature selection method performed best for the estimation of AGB during the whole growth period, with R2 0.79 and rRMSE 0.24 ton/ha. This model shows great potential for estimating AGB throughout the entire growth period of multiple potato varieties.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Arndt, C.; Diao, X.; Dorosh, P.; Pauw, K.; Thurlow, J. The Ukraine war and rising commodity prices: Implications for developing countries. Glob. Food Secur. 2023, 36, 100680. [Google Scholar] [CrossRef] [PubMed]
- Cai, S.; Zhao, X.; Pittelkow, C.M.; Fan, M.; Zhang, X.; Yan, X. Optimal nitrogen rate strategy for sustainable rice production in China. Nature 2023, 615, 73–79. [Google Scholar] [CrossRef] [PubMed]
- Wei, D.; Wang, X.; Luo, N.; Zhu, Y.; Wang, P.; Meng, Q. Alleviating groundwater depletion while realizing food security for sustainable development. J. Clean. Prod. 2023, 393, 136351. [Google Scholar] [CrossRef]
- Morier, T.; Cambouris, A.N.; Chokmani, K. In-season nitrogen status assessment and yield estimation using hyperspectral vegetation indices in a potato crop. Agron. J. 2015, 107, 1295–1309. [Google Scholar] [CrossRef]
- Mahlein, A.K.; Rumpf, T.; Welke, P.; Dehne, H.W.; Plümer, L.; Steiner, U.; Oerke, E.C. Development of spectral indices for detecting and identifying plant diseases. Remote Sens. Environ. 2013, 128, 21–30. [Google Scholar] [CrossRef]
- Thenkabail, P.S.; Smith, R.B.; De Pauw, E. Hyperspectral Vegetation Indices and Their Relationships with Agricultural Crop Characteristics. Remote Sens. Environ. 2000, 71, 158–182. [Google Scholar] [CrossRef]
- Virlet, N.; Sabermanesh, K.; Sadeghi-Tehran, P.; Hawkesford, M. Field Scanalyzer: An automated robotic field phenotyping platform for detailed crop monitoring. Funct. Plant Biol. 2016, 44, 143–153. [Google Scholar] [CrossRef]
- Huang, J.; Sedano, F.; Huang, Y.; Ma, H.; Li, X.; Liang, S.; Tian, L.; Zhang, X.; Fan, J.; Wu, W. Assimilating a synthetic Kalman filter leaf area index series into the WOFOST model to improve regional winter wheat yield estimation. Agric. For. Meteorol. 2016, 216, 188–202. [Google Scholar] [CrossRef]
- Chen, Z.; Jia, K.; Xiao, C.; Wei, D.; Zhao, X.; Lan, J.; Wei, X.; Yao, Y.; Wang, B.; Sun, Y.; et al. Leaf Area Index Estimation Algorithm for GF-5 Hyperspectral Data Based on Different Feature Selection and Machine Learning Methods. Remote Sens. 2020, 12, 2110. [Google Scholar] [CrossRef]
- Yang, H.; Yang, G.; Gaulton, R.; Zhao, C.; Li, Z.; Taylor, J.; Wicks, D.; Minchella, A.; Chen, E.; Yang, X. In-season biomass estimation of oilseed rape (Brassica napus L.) using fully polarimetric SAR imagery. Precis. Agric. 2019, 20, 630–648. [Google Scholar] [CrossRef]
- Rouse, J.W.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring vegetation systems in the great plains with ERTS. NASA 1974, 1, 74N30727. [Google Scholar]
- Birth, G.S.; McVey, G.R. Measuring the Color of Growing Turf with a Reflectance Spectrophotometer1. Agron. J. 1968, 60, 640–643. [Google Scholar] [CrossRef]
- Roujean, J.-L.; Breon, F.-M. Estimating PAR absorbed by vegetation from bidirectional reflectance measurements. Remote Sens. Environ. 1995, 51, 375–384. [Google Scholar] [CrossRef]
- Yue, J.; Yang, G.; Tian, Q.; Feng, H.; Xu, K.; Zhou, C. Estimate of winter-wheat above-ground biomass based on UAV ultrahigh-ground-resolution image textures and vegetation indices. ISPRS J. Photogramm. Remote Sens. 2019, 150, 226–244. [Google Scholar] [CrossRef]
- Li, Z.; Taylor, J.; Yang, H.; Casa, R.; Jin, X.; Li, Z.; Song, X.; Yang, G. A hierarchical interannual wheat yield and grain protein prediction model using spectral vegetative indices and meteorological data. Field Crops Res. 2020, 248, 107711. [Google Scholar] [CrossRef]
- Liu, Y.; Feng, H.; Yue, J.; Jin, X.; Fan, Y.; Chen, R.; Bian, M.; Ma, Y.; Li, J.; Xu, B.; et al. Improving potato AGB estimation to mitigate phenological stage impacts through depth features from hyperspectral data. Comput. Electron. Agric. 2024, 219, 108808. [Google Scholar] [CrossRef]
- Zheng, H.; Cheng, T.; Li, D.; Zhou, X.; Yao, X.; Tian, Y.; Cao, W.; Zhu, Y. Evaluation of RGB, Color-Infrared and Multispectral Images Acquired from Unmanned Aerial Systems for the Estimation of Nitrogen Accumulation in Rice. Remote Sens. 2018, 10, 824. [Google Scholar] [CrossRef]
- Liu, Y.; Feng, H.; Yue, J.; Fan, Y.; Bian, M.; Ma, Y.; Jin, X.; Song, X.; Yang, G. Estimating potato above-ground biomass by using integrated unmanned aerial system-based optical, structural, and textural canopy measurements. Comput. Electron. Agric. 2023, 213, 108229. [Google Scholar] [CrossRef]
- Panday, U.S.; Shrestha, N.; Maharjan, S.; Pratihast, A.K.; Shahnawaz; Shrestha, K.L.; Aryal, J. Correlating the Plant Height of Wheat with Above-Ground Biomass and Crop Yield Using Drone Imagery and Crop Surface Model, A Case Study from Nepal. Drones 2020, 4, 28. [Google Scholar] [CrossRef]
- Tirado, S.B.; Hirsch, C.N.; Springer, N.M. Utilizing Temporal Measurements from UAVs to Assess Root Lodging in Maize and its Impact on Productivity. Field Crops Res. 2020, 262, 108746. [Google Scholar] [CrossRef]
- Mavridou, E.; Vrochidou, E.; Papakostas, G.A.; Pachidis, T.; Kaburlasos, V.G. Machine Vision Systems in Precision Agriculture for Crop Farming. J. Imaging 2019, 5, 89. [Google Scholar] [CrossRef]
- Fu, Y.; Yang, G.; Song, X.; Li, Z.; Xu, X.; Feng, H.; Zhao, C. Improved Estimation of Winter Wheat Aboveground Biomass Using Multiscale Textures Extracted from UAV-Based Digital Images and Hyperspectral Feature Analysis. Remote Sens. 2021, 13, 581. [Google Scholar] [CrossRef]
- Yu, D.; Zha, Y.; Sun, Z.; Li, J.; Jin, X.; Zhu, W.; Bian, J.; Ma, L.; Zeng, Y.; Su, Z. Deep convolutional neural networks for estimating maize above-ground biomass using multi-source UAV images: A comparison with traditional machine learning algorithms. Precis. Agric. 2023, 24, 92–113. [Google Scholar] [CrossRef]
- Walter, A.; Liebisch, F.; Hund, A. Plant phenotyping: From bean weighing to image analysis. Plant Methods 2015, 11, 14. [Google Scholar] [CrossRef]
- Wan, L.; Zhu, J.; Du, X.; Zhang, J.; Han, X.; Zhou, W.; Li, X.; Liu, J.; Liang, F.; He, Y.; et al. A model for phenotyping crop fractional vegetation cover using imagery from unmanned aerial vehicles. J. Exp. Bot. 2021, 72, 4691–4707. [Google Scholar] [CrossRef]
- Wang, X.M.; Chang, Y.X. The spectrum of cyclic (3, λ)-GDD of type gv. Sci. China Math. 2010, 53, 431–446. [Google Scholar] [CrossRef]
- Zadoks, J.C.; Chang, T.T.; Konzak, C.F. A decimal code for the growth stages of cereals. Weed Res. 1974, 14, 415–421. [Google Scholar] [CrossRef]
- Lancashire, P.D.; Bleiholder, H.; Boom, T.V.D.; LangelÜDdeke, P.; Stauss, R.; Weber, E.; Witzenberger, A. A uniform decimal code for growth stages of crops and weeds. Ann. Appl. Biol. 1991, 119, 561–601. [Google Scholar] [CrossRef]
- Li, Z.; Zhao, Y.; Taylor, J.; Gaulton, R.; Jin, X.; Song, X.; Li, Z.; Meng, Y.; Chen, P.; Feng, H.; et al. Comparison and transferability of thermal, temporal and phenological-based in-season predictions of above-ground biomass in wheat crops from proximal crop reflectance data. Remote Sens. Environ. 2022, 273, 112967. [Google Scholar] [CrossRef]
- Maimaitijiang, M.; Ghulam, A.; Sidike, P.; Hartling, S.; Maimaitiyiming, M.; Peterson, K.; Shavers, E.; Fishman, J.; Peterson, J.; Kadam, S.; et al. Unmanned Aerial System (UAS)-based phenotyping of soybean using multi-sensor data fusion and extreme learning machine. ISPRS J. Photogramm. Remote Sens. 2017, 134, 43–58. [Google Scholar] [CrossRef]
- Bendig, J.; Yu, K.; Aasen, H.; Bolten, A.; Bennertz, S.; Broscheit, J.; Gnyp, M.L.; Bareth, G. Combining UAV-based plant height from crop surface models, visible, and near infrared vegetation indices for biomass monitoring in barley. Int. J. Appl. Earth Obs. Geoinf. 2015, 39, 79–87. [Google Scholar] [CrossRef]
- Geipel, J.; Link, J.; Claupein, W. Combined Spectral and Spatial Modeling of Corn Yield Based on Aerial Images and Crop Surface Models Acquired with an Unmanned Aircraft System. Remote Sens. 2014, 6, 10335–10355. [Google Scholar] [CrossRef]
- Liu, Y.; Feng, H.; Yue, J.; Jin, X.; Fan, Y.; Chen, R.; Bian, M.; Ma, Y.; Song, X.; Yang, G. Improved potato AGB estimates based on UAV RGB and hyperspectral images. Comput. Electron. Agric. 2023, 214, 108260. [Google Scholar] [CrossRef]
- Fan, Y.; Liu, Y.; Yue, J.; Jin, X.; Chen, R.; Bian, M.; Ma, Y.; Yang, G.; Feng, H. Estimation of potato yield using a semi-mechanistic model developed by proximal remote sensing and environmental variables. Comput. Electron. Agric. 2024, 223, 109117. [Google Scholar] [CrossRef]
- Liu, Y.; Feng, H.; Fan, Y.; Yue, J.; Chen, R.; Ma, Y.; Bian, M.; Yang, G. Improving potato above ground biomass estimation combining hyperspectral data and harmonic decomposition techniques. Comput. Electron. Agric. 2024, 218, 108699. [Google Scholar] [CrossRef]
- Banerjee, B.P.; Spangenberg, G.; Kant, S. Fusion of Spectral and Structural Information from Aerial Images for Improved Biomass Estimation. Remote Sens. 2020, 12, 3164. [Google Scholar] [CrossRef]
- Abela, J. The effect of consumer characteristics and behaviour on pork consumption in Malta. MCAST J. Appl. Res. Pract. 2018, 2, 44–58. [Google Scholar] [CrossRef]
- Schober, P.; Boer, C.; Schwarte, L.A. Correlation Coefficients: Appropriate Use and Interpretation. Anesth. Analg. 2018, 126, 1763–1768. [Google Scholar] [CrossRef]
- Zhao, C. Current situations and prospects of smart agriculture. J. S. China Agric. Univ. 2021, 42, 1–7. [Google Scholar]
- Ploton, P.; Mortier, F.; Réjou-Méchain, M.; Barbier, N.; Picard, N.; Rossi, V.; Dormann, C.; Cornu, G.; Viennois, G.; Bayol, N.; et al. Spatial validation reveals poor predictive performance of large-scale ecological mapping models. Nat. Commun. 2020, 11, 4540. [Google Scholar] [CrossRef]
- Xu, X.; Fan, L.; Li, Z.; Meng, Y.; Feng, H.; Yang, H.; Xu, B. Estimating Leaf Nitrogen Content in Corn Based on Information Fusion of Multiple-Sensor Imagery from UAV. Remote Sens. 2021, 13, 340. [Google Scholar] [CrossRef]
- Wang, A.; Zhang, Y.; Huang, J.; Ding, Y.; Meng, M. Recent Progresses in Research of Crop Classification by Using Remote Sensing. Geomat. Spat. Inf. Technol. 2021, 44, 80–83, 88. [Google Scholar]
- Qian, Y.; Yang, Z.; Di, L.; Rahman, M.S.; Tan, Z.; Xue, L.; Gao, F.; Yu, E.G.; Zhang, X. Crop Growth Condition Assessment at County Scale Based on Heat-Aligned Growth Stages. Remote Sens. 2019, 11, 2439. [Google Scholar] [CrossRef]
- Liu, N.; Zhao, R.; Qiao, L.; Zhang, Y.; Li, M.; Sun, H.; Xing, Z.; Wang, X. Growth Stages Classification of Potato Crop Based on Analysis of Spectral Response and Variables Optimization. Sensors 2020, 20, 3995. [Google Scholar] [CrossRef]
- Duan, M.; Zhao, X.; Li, S.; Miao, G.; Bai, L.; Zhang, Q.; Yang, W.; Zhao, X. Metabolic score for insulin resistance (METS-IR) predicts all-cause and cardiovascular mortality in the general population: Evidence from NHANES 2001–2018. Cardiovasc. Diabetol. 2024, 23, 243. [Google Scholar] [CrossRef] [PubMed]
- Li, B.; Xu, X.; Zhang, L.; Han, J.; Bian, C.; Li, G.; Liu, J.; Jin, L. Above-ground biomass estimation and yield prediction in potato by using UAV-based RGB and hyperspectral imaging. ISPRS J. Photogramm. Remote Sens. 2020, 162, 161–172. [Google Scholar] [CrossRef]
- Han, L.; Yang, G.; Dai, H.; Xu, B.; Yang, H.; Feng, H.; Li, Z.; Yang, X. Modeling maize above-ground biomass based on machine learning approaches using UAV remote-sensing data. Plant Methods 2019, 15, 10. [Google Scholar] [CrossRef]
- Aghighi, H.; Azadbakht, M.; Ashourloo, D.; Shahrabi, H.S.; Radiom, S. Machine Learning Regression Techniques for the Silage Maize Yield Prediction Using Time-Series Images of Landsat 8 OLI. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 4563–4577. [Google Scholar] [CrossRef]
- Peng, J.; Manevski, K.; Kørup, K.; Larsen, R.; Andersen, M.N. Random forest regression results in accurate assessment of potato nitrogen status based on multispectral data from different platforms and the critical concentration approach. Field Crops Res. 2021, 268, 108158. [Google Scholar] [CrossRef]
- Barnes, E.M.; Clarke, T.; Richards, S.E.; Colaizzi, P.D.; Haberland, J.; Kostrzewski, M.; Waller, P.M.; Choi, C.Y.; Riley, E.; Thompson, T.L.; et al. Coincident detection of crop water stress, nitrogen status and canopy density using ground-based multispectral data. In Proceedings of the Fifth International Conference on Precision Agriculture, Bloomington, MN, USA, 6 July 2000. [Google Scholar]
- Daughtry, C.S.T.; Walthall, C.L.; Kim, M.S.; de Colstoun, E.B.; McMurtrey, J.E. Estimating Corn Leaf Chlorophyll Concentration from Leaf and Canopy Reflectance. Remote Sens. Environ. 2000, 74, 229–239. [Google Scholar] [CrossRef]
- Haboudane, D.; Miller, J.R.; Pattey, E.; Zarco-Tejada, P.J.; Strachan, I.B. Hyperspectral vegetation indices and novel algorithms for predicting green LAI of crop canopies: Modeling and validation in the context of precision agriculture. Remote Sens. Environ. 2004, 90, 337–352. [Google Scholar] [CrossRef]
- Haboudane, D.; Miller, J.R.; Tremblay, N.; Zarco-Tejada, P.J.; Dextraze, L. Integrated narrow-band vegetation indices for prediction of crop chlorophyll content for application to precision agriculture. Remote Sens. Environ. 2002, 81, 416–426. [Google Scholar] [CrossRef]
- Gitelson, A.A. Wide Dynamic Range Vegetation Index for Remote Quantification of Biophysical Characteristics of Vegetation. J. Plant Physiol. 2004, 161, 165–173. [Google Scholar] [CrossRef] [PubMed]
- Datt, B. A New Reflectance Index for Remote Sensing of Chlorophyll Content in Higher Plants: Tests using Eucalyptus Leaves. J. Plant Physiol. 1999, 154, 30–36. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Viña, A.; Ciganda, V.; Rundquist, D.C.; Arkebauer, T.J. Remote estimation of canopy chlorophyll content in crops. Geophys. Res. Lett. 2005, 32, L08403. [Google Scholar] [CrossRef]
- Bannari, A.; Asalhi, H.; Teillet, P.M. Transformed difference vegetation index (TDVI) for vegetation cover mapping. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Toronto, ON, Canada, 24–28 June 2002; pp. 3053–3055. [Google Scholar]
- Nichol, J.E.; Sarker, M.L.R. Improved Biomass Estimation Using the Texture Parameters of Two High-Resolution Optical Sensors. IEEE Trans. Geosci. Remote Sens. 2011, 49, 930–948. [Google Scholar] [CrossRef]
- Place, G.T.; Reberg-Horton, S.C.; Carter, T.E.; Brinton, S.R.; Smith, A.N. Screening Tactics for Identifying Competitive Soybean Genotypes. Commun. Soil Sci. Plant Anal. 2011, 42, 2654–2665. [Google Scholar] [CrossRef]
- Li, B.; Liu, R.; Liu, S.; Liu, Q.; Liu, F.; Zhou, Q. Monitoring vegetation coverage variation of winter wheat by low-altitude UAV remote sensing system. Trans. Chin. Soc. Agric. Eng. 2012, 28, 160–165. [Google Scholar]
- Huang, D.; Li, S.; Yin, L.; Zhou, Z. Research on Vegetation Extraction and Fractional Vegetation Cover of Karst Area Based on Visible Light Image of UAV. Acta Agrestia Sin. 2020, 28, 1664–1672. [Google Scholar]
- Zhang, N.; Chen, M.; Yang, F.; Yang, C.; Yang, P.; Gao, Y.; Shang, Y.; Peng, D. Forest Height Mapping Using Feature Selection and Machine Learning by Integrating Multi-Source Satellite Data in Baoding City, North China. Remote Sens. 2022, 14, 4434. [Google Scholar] [CrossRef]
- Dang, A.T.N.; Nandy, S.; Srinet, R.; Luong, N.V.; Ghosh, S.; Senthil Kumar, A. Forest aboveground biomass estimation using machine learning regression algorithm in Yok Don National Park, Vietnam. Ecol. Inform. 2019, 50, 24–32. [Google Scholar] [CrossRef]
- Liu, Y.; Feng, H.; Huang, Y.; Yang, F.; Wu, C.; Sun, Q.; Yang, G. Estimation of Potato Above-Ground Biomass Based on Hy-perspectral Characteristic Parameters of UAV and Plant Height. Spectrosc. Spectr. Anal. 2021, 41, 903–911. [Google Scholar]
- Feng, X.; Zhang, R.; Liu, M.; Liu, Q.; Li, F.; Yan, Z.; Zhou, F. An Accurate Regression of Developmental Stages for Breast Cancer Based on Transcriptomic Biomarkers. Biomark. Med. 2019, 13, 5–15. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Features | Models | Model Index | Train | Test | ||||
|---|---|---|---|---|---|---|---|---|
| R2 | rRMSE | MAE | R2 | rRMSE | MAE | |||
| VIs | Lasso | MCARI2 TCARI | 0.05 | 0.54 | 0.96 | 0.06 | 0.52 | 0.89 |
| MLR | 0.34 | 0.44 | 0.75 | 0.24 | 0.49 | 0.85 | ||
| Ridge | 0.39 | 0.42 | 0.70 | 0.32 | 0.48 | 0.80 | ||
| SLR | 0.24 | 0.54 | 0.90 | 0.40 | 0.44 | 0.77 | ||
| PLSR | 0.44 | 0.39 | 0.66 | 0.43 | 0.45 | 0.68 | ||
| RF | 0.89 | 0.17 | 0.27 | 0.65 | 0.30 | 0.47 | ||
| Texture | MLR | BAND5entropy BAND6contrast BAND6ASM | 0.08 | 0.52 | 0.92 | 0.05 | 0.55 | 0.97 |
| PLSR | 0.20 | 0.49 | 0.83 | 0.09 | 0.51 | 0.93 | ||
| Lasso | 0.08 | 0.51 | 0.88 | 0.09 | 0.56 | 1.01 | ||
| SLR | 0.15 | 0.55 | 0.97 | 0.14 | 0.57 | 1.01 | ||
| Ridge | 0.15 | 0.51 | 0.84 | 0.21 | 0.48 | 0.89 | ||
| RF | 0.82 | 0.21 | 0.35 | 0.63 | 0.32 | 0.49 | ||
| Features | Models | Model Index | Train | Test | ||||
|---|---|---|---|---|---|---|---|---|
| R2 | rRMSE | MAE | R2 | rRMSE | MAE | |||
| VIs | MLR | GRNDVI SR WDRVI MSR RECI | 0.39 | 0.44 | 0.81 | 0.25 | 0.43 | 0.78 |
| SLR | 0.32 | 0.46 | 0.86 | 0.39 | 0.41 | 0.71 | ||
| Lasso | 0.53 | 0.36 | 0.65 | 0.57 | 0.39 | 0.66 | ||
| RF | 0.88 | 0.19 | 0.31 | 0.58 | 0.35 | 0.59 | ||
| Ridge | 0.60 | 0.35 | 0.59 | 0.60 | 0.33 | 0.61 | ||
| PLSR | 0.59 | 0.35 | 0.61 | 0.63 | 0.33 | 0.59 | ||
| Texture | MLR | Band6correlation Band6homogeneity Band4contrast | 0.11 | 0.54 | 0.94 | 0.03 | 0.49 | 0.85 |
| PLSR | 0.19 | 0.48 | 0.83 | 0.06 | 0.56 | 0.99 | ||
| Lasso | 0.17 | 0.50 | 0.87 | 0.12 | 0.51 | 0.90 | ||
| SLR | 0.27 | 0.48 | 0.85 | 0.21 | 0.46 | 0.82 | ||
| Ridge | 0.35 | 0.44 | 0.75 | 0.30 | 0.45 | 0.75 | ||
| RF | 0.71 | 0.23 | 0.38 | 0.60 | 0.35 | 0.56 | ||
| Models | Optimal Feature Fusion | Train | Test | ||||
|---|---|---|---|---|---|---|---|
| R2 | rRMSE | MAE | R2 | rRMSE | MAE | ||
| MLR | VIS + GS | 0.48 | 0.39 | 0.65 | 0.40 | 0.44 | 0.71 |
| PLSR | VIS + Texture | 0.39 | 0.42 | 0.71 | 0.56 | 0.37 | 0.63 |
| RF | VIS + GDD + CC + GS | 0.90 | 0.16 | 0.25 | 0.78 | 0.24 | 0.38 |
| Lasso | VIS + GDD + CC + GS | 0.39 | 0.44 | 0.75 | 0.47 | 0.37 | 0.59 |
| Ridge | Texture + GDD + CC + GS | 0.61 | 0.35 | 0.59 | 0.59 | 0.33 | 0.56 |
| SLR | VIS + Texture + GDD + CC + GS | 0.60 | 0.38 | 0.64 | 0.64 | 0.38 | 0.65 |
| Models | Optimal Feature Fusion | Train | Test | ||||
|---|---|---|---|---|---|---|---|
| R2 | rRMSE | MAE | R2 | rRMSE | MAE | ||
| MLR | VIS + CC | 0.52 | 0.39 | 0.67 | 0.46 | 0.36 | 0.63 |
| RF | VIS + GS | 0.89 | 0.17 | 0.29 | 0.79 | 0.29 | 0.46 |
| Ridge | VIS + GDD + CC | 0.66 | 0.33 | 0.55 | 0.70 | 0.28 | 0.52 |
| SLR | VIS + Texture + GDD | 0.54 | 0.37 | 0.63 | 0.63 | 0.33 | 0.60 |
| Lasso | VIS + GDD + CC + GS | 0.57 | 0.36 | 0.62 | 0.61 | 0.33 | 0.58 |
| PLSR | VIS + Texture + GDD + CC | 0.63 | 0.34 | 0.57 | 0.64 | 0.31 | 0.52 |
| Experiment | Date of UAV Flights | Date of Field Sampling | Samples | Growth Stage |
|---|---|---|---|---|
| 1 | 4 July 2023 | 4 July 2023 | 18 | Tuber formation |
| 17 July 2023 | 17 July 2023 | 18 | Tuber expansion | |
| 3 August 2023 | 3 August 2023 | 18 | Starch accumulation | |
| 13 August 2023 | 13 August 2023 | 18 | Mature harvest | |
| 2 | 5th July 2023 | 5th July 2023 | 40 | Tuber formation |
| 18 July 2023 | 18 July 2023 | 40 | Tuber expansion | |
| 3 August 2023 | 3 August 2023 | 40 | Starch accumulation | |
| 14 August 2023 | 14 August 2023 | 40 | Mature harvest | |
| 3 | 6 July 2023 | 6 July 2023 | 36 | Tuber formation |
| 20 July 2023 | 20 July 2023 | 36 | Tuber expansion | |
| 5 August 2023 | 5th August 2023 | 36 | Starch accumulation | |
| 18 August 2023 | 18 August 2023 | 36 | Mature harvest |
| Spectral Band | Center Wavelength/nm | Bandwidth/nm | Pixel Resolution | Field of View |
|---|---|---|---|---|
| Blue (Band-1) | 475 | 32 | 1456 × 1088 (1.6 MP) | 50°HFOV × 38°VFOV |
| Green (Band-2) | 560 | 27 | 1456 × 1088 (1.6 MP) | 50°HFOV × 38°VFOV |
| Red (Band-4) | 668 | 16 | 1456 × 1088 (1.6 MP) | 50°HFOV × 38°VFOV |
| NIR (Band-5) | 717 | 12 | 1456 × 1088 (1.6 MP) | 50°HFOV × 38°VFOV |
| Red edge (Band-6) | 842 | 57 | 1456 × 1088 (1.6 MP) | 50°HFOV × 38°VFOV |
| Panchromatic (Band-3) | 634.5 | 463 | 2464 × 2056 (1.6 MP) | 44°HFOV × 38°VFOV |
| Abbreviation | Full Name | Formulas | Reference |
|---|---|---|---|
| GRVI | Green ratio vegetation index | NIR/G | [50] |
| MCARI | Modified chlorophyll absorption in reflectance index | ((RE − R) − 0.2 × (RE − G)) × (RE/R) | [51] |
| MCARI2 | Modified chlorophyll absorption in reflectance index 2 | 1.52 × (NIR − R) − 1.3 × *(NIR − G)/((2 × NIR + 1)2 − (6 × NIR − 5 × (R)0.5) − 0.5)0.5 | [52] |
| NDRE | Normalized difference red edge index | (NIR − RE)/(NIR + RE) | [50] |
| NDVI | Normalized difference vegetation index | (NIR − R)/(NIR + R) | [11] |
| RDVI | Renormalized difference vegetation index | (NIR − R)/(NIR + R)0.5 | [13] |
| SR | Simple ratio index | NIR/R | [12] |
| TCARI | Transformed chlorophyll absorption ratio | 3 × ((RE − R) − 0.2 × (RE − G)*(RE/R)) | [53] |
| WDRVI | Wide dynamic range vegetation index | (0.1 × NIR − R)/(0.1 × NIR + R) | [53] |
| NDI | Difference vegetation index | (NIR − RE)/(NIE + R) | [54] |
| MSR | Modified simple ratio index | (NIR/R − 1)/((NIR/R)0.5 + 1) | [55] |
| GCI | Green chlorophyll index | NIR/G − 1 | [56] |
| RECI | Red-edge chlorophyll index | NIR/RE − 1 | [56] |
| TDVI | Transformed difference vegetation index | (0.5 + (NIR − R)/(NIR + R))2 | [57] |
| Growth Phase | Z35 | Z5 | Z27 | Z49 | Z19 |
|---|---|---|---|---|---|
| S1 | 0.28 | 0.27 | 0.20 | 0.19 | 0.17 |
| S2 | 0.47 | 0.44 | 0.34 | 0.31 | 0.29 |
| S3 | 0.68 | 0.65 | 0.51 | 0.47 | 0.44 |
| S4 | 0.85 | 0.80 | 0.62 | 0.57 | 0.54 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xian, G.; Liu, J.; Lin, Y.; Li, S.; Bian, C. Multi-Feature Fusion for Estimating Above-Ground Biomass of Potato by UAV Remote Sensing. Plants 2024, 13, 3356. https://doi.org/10.3390/plants13233356
Xian G, Liu J, Lin Y, Li S, Bian C. Multi-Feature Fusion for Estimating Above-Ground Biomass of Potato by UAV Remote Sensing. Plants. 2024; 13(23):3356. https://doi.org/10.3390/plants13233356
Chicago/Turabian StyleXian, Guolan, Jiangang Liu, Yongxin Lin, Shuang Li, and Chunsong Bian. 2024. "Multi-Feature Fusion for Estimating Above-Ground Biomass of Potato by UAV Remote Sensing" Plants 13, no. 23: 3356. https://doi.org/10.3390/plants13233356
APA StyleXian, G., Liu, J., Lin, Y., Li, S., & Bian, C. (2024). Multi-Feature Fusion for Estimating Above-Ground Biomass of Potato by UAV Remote Sensing. Plants, 13(23), 3356. https://doi.org/10.3390/plants13233356