Advances in Finger and Partial Hand Prosthetic Mechanisms





Abstract
1. Introduction
2. Technical Requirement Definition and Analysis
2.1. Functional Characteristics
2.2. Grasp Characteristics
- Natural motion: the prosthesis must emulate the closure as much as possible than an anthropomorphic hand. This ability is referred to as pre-shaping of the finger when contacting with an object (Figure 2).
- Shape-adaptivity: the stability of each grasp pattern greatly depends on this characteristic that is often obtained with an underactuated mechanism.
- Pinching motion: the distal phalanx remains straight or rotates in counterclockwise direction; so, the fingertips of index and thumb are in front of each other. It results in an efficient grasp for thin objects like keys or papers (Figure 3).
- Stability: objects need to be grasped and manipulated safely with different shapes and surfaces without failures, avoiding the ejection phenomenon (i.e., negative contact forces).
- Force isotropy: grasping should be fulfilled with a uniform distribution of forces, which allows for example a light and stable grip of fragile objects. It is a significant feature for the prosthetic finger mechanisms that adapt to the shape of the object’s body.
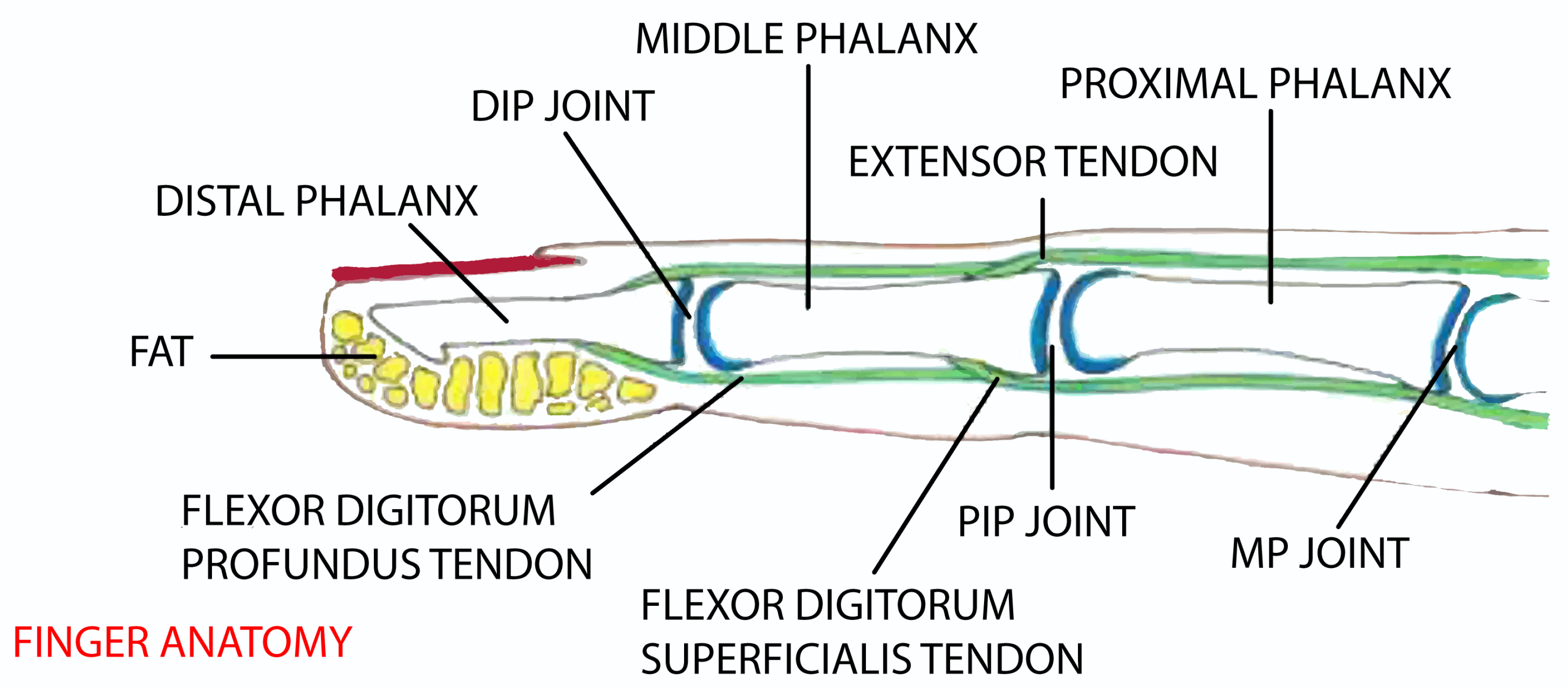
- Workspace: it depends on the number and length of the phalanges with which the prosthetic finger is modeled. Most prostheses show a planar movement.
- Stiffness: it is the relationship between the actuation torque and the phalanx movement considering the forces exerted by the object.
- Bond and adjustment (for body-powered devices): the residual finger must be wrapped effectively by the prosthesis and be able to drive the prosthetic finger as a natural extension with an efficiency ratio as close as possible to the unit.
- Accuracy in the required tasks.
- Time of extension and bend motion.
2.3. Physical Characteristics
- Weight: the lighter the better.
- Number of phalanges: it results from a trade-off between the increase in the number of components making up the prosthesis, the improvement of the setting performance and the increase in complexity.
- Compactness: it is defined as the ratio between the width and length of a finger. It is ideal to achieve a ratio like human finger.
- Design flexibility: it is recommended versatility to the uniqueness of the user (finger size, size of components making up the prosthesis).
- Biocompatible materials that avoid irritation due to prolonged use.
- Appearance: the amputation of the upper extremities involves a change in the external appearance that can lead to psychological problems in the acceptance of one’s condition.
- Manufacturing process: it provides a prosthesis with the best values of the above parameters at the most competitive cost considering the various production processes.
- Noisiness: the purpose of all prosthesis is to provide the functional result without attracting undue attention to the user.
3. One-Dof Mechanisms
4. Two-Dofs Mechanisms with One Degree of Under-Actuation
5. Multi-Dof Under-Actuated Mechanisms
6. Miscellaneous Mechanisms
7. Discussion and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Neha, E.; Suhaib, M.; Mukherjee, S. Design Issues in Multi-finger RoboticHands: An Overview. In Advances in Engineering Design; Springer Nature Singapore Pte Ltd.: Delhi, India, 2019; pp. 335–343. [Google Scholar]
- Sarac, M.; Solazzi, M.; Frisoli, A. Design Requirements of Generic Hand Exoskeletons and Survey of Hand Exoskeletons for Rehabilitation, Assistive or Haptic Use. IEEE Trans. Haptics 2019, 1, 99. [Google Scholar] [CrossRef] [PubMed]
- Rashid, A.; Hasan, O. Wearable technologies for hand joints monitoring for rehabilitation: A survey. Microelectron. J. 2018, 88, 173–183. [Google Scholar] [CrossRef]
- Piazza, C.; Grioli, G.; Catalano, M.G.; Bicchi, A. A Century of Robotic Hands. Annu. Rev. Control. Robot. Auton. Syst. 2019, 2, 1–32. [Google Scholar] [CrossRef]
- Graña, M.; Alonso, M.; Izaguirre, A. A Panoramic Survey on Grasping Research Trends and Topics. Cybern. Syst. 2019, 50, 40–57. [Google Scholar] [CrossRef]
- Li, R.; Qiao, H.; Knoll, A. A Survey for Methods and Strategies for High-precision Robotic Grasping and Assembly Tasks—Some New Trends. IEEE/ASME Trans. Mechatron. 2019, 24, 2718–2732. [Google Scholar] [CrossRef]
- Health. Available online: https://www.hopkinsmedicine.org/health/treatment-tests-and-therapies/anatomy-of-the-hand (accessed on 30 September 2020).
- Getting the Finger. Available online: https://mddirect.org/tag/finger-anatomy/ (accessed on 30 September 2020).
- Thompson, J.C. Netters Concise Orthopaedic Anatomy, 2nd ed.; Saunders Elsevier: Philadelphia, PA, USA, 2010. [Google Scholar]
- Doyle, J.R. Anatomy of the finger flexor tendon sheath and pulley system. J. Hand Surg. 1988, 13, 473–484. [Google Scholar] [CrossRef]
- Bender, L.F.; Koch, R.D. Meeting the challenge of partial hand amputations. Ortothics Prosthet. 1976, 30, 3–11. [Google Scholar]
- Bretz, K.J.; Jobbagy, Á.; Bretz, K. Force measurement of hand and fingers. Biomech. Hung. 2010, 3, 61–66. [Google Scholar] [CrossRef]
- Buryanov, A.; Kotiuk, V. Proportions of Hand Segments. Int. J. Morphol. 2010, 28, 755–758. [Google Scholar] [CrossRef]
- Leal-Naranjo, J.A.; Torres-San Miguel, C.R.; Carbajal-Romero, M.F.; Martínez-Sáez, L. Structural numerical analysis of a three fingers prosthetic hand prototype. Int. J. Phys. Sci. 2013, 8, 526–536. [Google Scholar] [CrossRef]
- Imbinto, I.; Montagnani, F.; Bacchereti, M.; Cipriani, C.; Davalli, A.; Sacchetti, R.; Gruppioni, E.; Castellano, S.; Controzzi, M. The S-Finger: A Synergetic Externally Powered Digit with Tactile Sensing and Feedback. IEEE Trans. Neural Syst. Rehabil. Eng. 2018, 26, 1264–1271. [Google Scholar] [CrossRef] [PubMed]
- Choi, Y.-J. Finger Prosthesis. K.R. Patent 1020180096088A, 1 September 2016. [Google Scholar]
- Dechev, N.; Cleghorn, W.; Naumann, S. Multiple finger, passive adaptive grasp prosthetic hand. Mech. Mach. Theory 2001, 36, 1157–1173. [Google Scholar] [CrossRef]
- Bashore, I. Automatic Artificial Finger. U.S. Patent 319,776, 9 June 1885. [Google Scholar]
- Omarkulov, N.; Telegenov, K.; Zeinullin, M.; Begalinova, A.; Shintemirov, A. Design and analysis of an underactuated anthropomorphic finger for upper limb prosthetics. In Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015; Volume 2015, pp. 2474–2477. [Google Scholar]
- Rodriguez, N.E.; Carbone, G.; Ceccarelli, M. Optimal Design of driving mechanism in a 1-D.O.F. anthropomorphic finger. Mech. Mach. Theory 2006, 41, 897–911. [Google Scholar] [CrossRef]
- Jang, G.; Lee, C.; Lee, H.; Choi, Y. Robotic index finger prosthesis using stackable double 4-BAR mechanisms. Mechatronics 2013, 23, 318–325. [Google Scholar] [CrossRef]
- Thompson, R.; Bengtsson, J.; Peto, A.C.; Macduff, C.C.; Minnis, S.T.; Klumper, E.D.; Crittenden, B.A. Bio-Mechanical Prosthetic Finger with H-Shape Rocker. U.S. Patent 0239068 A1, 24 August 2017. [Google Scholar]
- Thompson, R.; Bengtsson, J.; Peto, A.C.; Macduff, C.C.; Minnis, S.T.; Klumper, E.D.; Crittenden, B.A. Bio-Mechanical Prosthetic Finger with Y-Shape Rocker. U.S. Patent 296361 A1, 19 October 2017. [Google Scholar]
- Thompson, R.; Bengtsson, J.; Peto, A.C.; Macduff, C.C.; Minnis, S.T.; Klumper, E.D.; Crittenden, B.A. Biomechanical Finger Brace Assembly. U.S. Patent 0020691 A1, 26 January 2017. [Google Scholar]
- Thompson, R.; Bengtsson, J.; Peto, A.C.; Macduff, C.C.; Minnis, S.T.; Klumper, E.D.; Crittenden, B.A. Bidirectional Biomechanical Prosthetic Full Finger Configured for Abduction and Adduction with MCP Pivot and Multiple Finger-Ring. U.S. Patent 181870 A1, 29 June 2017. [Google Scholar]
- Thompson, R.; Bengtsson, J.; Peto, A.C.; Macduff, C.C.; Minnis, S.T.; Klumper, E.D.; Crittenden, B.A. Bio-Mechanical Prosthetic Thumb. W.O. Patent 035387 A1, 2 March 2017. [Google Scholar]
- Napier, J.; Russell, N.J.; Russell, T. Hands; Princeton University Press: Princeton, NJ, USA, 1993; Volume 55. [Google Scholar]
- Macduff, C.C. Bio-Mechanical Prosthetic Thumb. U.S. Patent 0303750 A1, 9 October 2014. [Google Scholar]
- Macduff, C.C. Bio-Mechanical Prostetic Full Finger. U.S. Patent 0303749 A1, 9 October 2014. [Google Scholar]
- Hunter, M.; Del Rey, M. Mechanical Finger. U.S. Patent 0235555 A1, 18 August 2016. [Google Scholar]
- Martinez-Luna, C.H.; Michael, A.I.D.; Taylor, R.D.; Todd, R.F.; Thane, R.H.; Craig, M.K.; Kevin, E.K.; Carlton, W.K.; Benjamin, D.P.; Todd, W.R.; et al. Prosthetic Fingertips End Effector. W.O. Patent 075031 A1, 18 April 2019. [Google Scholar]
- Choi, K.Y.; Akhtar, A.; Bretl, T. Compliant Four-Bar Linkage Mechanism for a Robotic Finger. U.S. Patent 0328550 A1, 31 October 2019. [Google Scholar]
- Massa, B.; Roccella, S.M.; Carrozza, M.C.; Dario, P. Design and development of an underactuated prosthetic hand. Mech. Sci. 2002, 1, 19–26. [Google Scholar]
- Zappatore, G.A.; Reina, G.; Messina, A. Analysis of a Highly Underactuated Robotic Hand. Int. J. Mech. Control 2017, 18, 17–24. [Google Scholar]
- Zappatore, G.A.; Reina, G.; Messina, A. A Toolbox for the Analysis of the Grasp Stability of Underactuated Fingers. Robotics 2019, 8, 26. [Google Scholar] [CrossRef]
- Kyberd, P.J.; Light, C.; Chappell, P.H.; Nightingale, J.M.; Whatley, D.; Evans, M. The design of anthropomorphic prosthetic hands: A study of the Southampton Hand. Robotica 2001, 19, 593–600. [Google Scholar] [CrossRef]
- Fukaya, N.; Toyama, S.; Asfour, T.; Dillman, R. Design of the TUAT/Karlsruhe Humanoid Hand. In Proceedings of the International Conference on Intelligent Robots and Systems, Takamatsu, Japan, 31 October–5 November 2000. [Google Scholar]
- Puchhammer, G.; Haslinger, M. Prosthetic Finger. U.S. Patent 0191343 A1, 29 July 2010. [Google Scholar]
- Hua, L.; Sheng, X.J.; Zhu, X.Y. Underactuated Mechanical Finger with Self-Adaption to Shapes. C.N. Patent 103786161A, 14 May 2014. [Google Scholar]
- Laliberté, T.; Gosselin, C. Underactuation in Space Robotic Hands. In Proceedings of the International Symposium on Artificial Intelligence and Robotics & Automation in Space, Montreal, QC, Canada, 18–22 June 2001. [Google Scholar]
- Li, G.; Jin, J.; Deschamps-Berger, S.; Sun, Z.; Zhang, W.; Chen, Q. Indirectly self-adaptive underactuated robot hand with block-linkage mechanisms. Int. J. Precis. Eng. Manuf. 2014, 15, 1553–1562. [Google Scholar] [CrossRef]
- Pan, Z.H.; Zhang, W.Z. Connection Rod Key Slot Type Coupling Under-Actuated Double-Joint Robot Finger Device. C.N. Patent 102935642A, 20 February 2013. [Google Scholar]
- Zhang, W.; Zhao, D.; Zhou, H.; Sun, Z.; Du, D.; Chen, Q. Two-DOF coupled and self-adaptive (COSA) finger: A novel underactuated mechanism. Int. J. Humanoid Robot. 2013, 10, 1330001. [Google Scholar] [CrossRef]
- Stavenuiter, R.A.; Birglen, L.; Herder, J. A planar underactuated grasper with adjustable compliance. Mech. Mach. Theory 2017, 112, 295–306. [Google Scholar] [CrossRef]
- Li, X.; Huang, Q.; Chen, X.; Yu, Z.; Zhu, J.; Han, J. A novel under-actuated bionic hand and its grasping stability analysis. Adv. Mech. Eng. 2017, 9. [Google Scholar] [CrossRef]
- Cheng, M.; Jiang, L.; Ni, F.; Fan, S.; Liu, Y.; Liu, H. Design of a Highly Integrated Underactuated Finger towards Prosthetic Hand. In Proceedings of the IEEE International Conference on Advanced Intelligent Mechatronics, Munich, Germany, 3–7 July 2017. [Google Scholar]
- Zou, H.Y.; Song, H.X.; Zhang, H.M.; Sun, J.N.; Zhang, J.R.; Sun, J.; Wang, Q.; Yuan, B. Functional Finger Prosthesis. CN104825259A, 30 April 2015. [Google Scholar]
- Yang, D.P.; Zhao, J.D.; Gu, Y.K.; Wang, X.Q.; Li, N.; Jiang, L.; Liu, H.; Huang, H.; Zhao, D.-W. An Anthropomorphic Robot Hand Developed Based on Underactuated Mechanism and Controlled by EMG Signals. J. Bionic Eng. 2009, 6, 255–263. [Google Scholar] [CrossRef]
- Huang, H.; Liu, H.; Zhao, J. Under-Actuated Coupling Transmission Type Imitation Human Finger Mechanism. C.N. Patent 101190528A, 4 June 2008. [Google Scholar]
- Koganezawa, K.; Kunugi, N.; Niikura, R. Backdrivable mechanism for artificial finger. IFAC Proc. Vol. 2011, 44, 8095–8100. [Google Scholar] [CrossRef]
- Tián, L.; Zhāng, W.Z.; Chén, Q.; Dōu, D.; Sūn, Z.G. Underactuated Drive Finger Device of Imitating Cascaded Connection of Hand of Robot. C.N. Patent 101049695A, 10 October 2007. [Google Scholar]
- Yoon, D.; Choi, Y. Adaptive Robotic Finger Prosthetis for Grasping Arbitrary Object Shape. U.S. Patent 0235782 A1, 23 August 2018. [Google Scholar]
- Azlan, N.; Yamaura, H. Anthropomorphic finger with optimized geometric parameters for pinching and grasping tasks. Mech. Mach. Theory 2012, 49, 52–66. [Google Scholar] [CrossRef]
- Mu, D.; Huang, Z. A new type of paralle finger mechanism. In Proceedings of the International Conference of Robotics and Biomimetics, Sanya, China, 15–18 December 2007. [Google Scholar]
- Tae-Uk, K.; Yonghwan, O. Design of spatial adaptive fingered gripper using a spherical five-bar mechanism. In Proceedings of the 2014 International Conference on Advanced Mechatronic Systems, Kumamoto, Japan, 10–12 August 2014. [Google Scholar]
- Yuan, S.; Epps, A.D.; Nowak, J.B.; Salisbury, J.K. Design of a Roller-Based Dexterous Hand for Object Grasping and Within-Hand Manipulation. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–4 June 2020; pp. 8870–8876. [Google Scholar]
- Rea, P. On the Design of Underactuated Finger Mechanisms for Robotic Hands. Adv. Mechatron. 2011, 6, 131–150. [Google Scholar]
- Wu, L.; Carbone, G.; Ceccarelli, M. Designing an underactuated mechanism for a 1 active DOF finger operation. Mech. Mach. Theory 2009, 44, 336–348. [Google Scholar] [CrossRef]
- Li, X.; Lan, T.; Wu, L. Kinematics simulation for a new kind of underactuated robotic finger. Int. J. Model. Simul. 2017, 37, 234–240. [Google Scholar] [CrossRef]
- Gopura, R.A.R.C.; Bandara, D.S.V.; Gunasekera, N.P.A.; Hapuarachchi, V.H.; Ariyarathna, B.S. A prosthetic hand with self-adaptive fingers. In Proceedings of the 2017 3rd International Conference on Control, Automation and Robotics (ICCAR), Nagoya, Japan, 22–24 April 2017. [Google Scholar]
- Hirano, D.; Nagaoka, K.; Yoshida, K. Design of underactuated hand for caging-based grasping of free-flying object. In Proceedings of the 2013 IEEE/SICE International Symposium on System Integration, Kobe, Japan, 15–17 December 2013. [Google Scholar]
- Zhang, W.Z.; Zhao, D.Y.; Chen, Q.; Dou, D.; Sun, Z.G. Coupling Under-Actuated Integrated Three-Joint Robot Finger Device. C.N. Patent 101722514A, 9 June 2010. [Google Scholar]
- Khakpour, H.; Birglen, L. Numerical Analysis of the Grasp Configuration of a Planar 3-DOF Linkage-Driven Underactuated Finger. J. Comput. Nonlinear Dyn. 2012, 8, 021010. [Google Scholar] [CrossRef]
- Deng, H.; Duan, X.G.; Zhang, Y. Multimode Under-Actuated Human Finger Simulation Device with Quick Reflex Grabbing Function. C.N. Patent 102873689A, 16 January 2013. [Google Scholar]
- Schulz, S. Finger Element. D.E. Patent 10 2008 056 520, 3 May 2012. [Google Scholar]
- Schulz, S. Finger Element with a Passive Joint. D.E. Patent 10214011554 A1, 2 November 2016. [Google Scholar]
- Point Design LLC. Available online: https://pointdesignsllc.com/products/prosthetic-fingers/ (accessed on 30 September 2020).
- Fong, T.D. Finger Prosthesis. U.S. Patent 0330432 A1, 27 December 2012. [Google Scholar]
- Alberto, P.; Vincent, P.; Apel, F.H. Artificial Limb. U.S. Patent 1507682, 9 September 1924. [Google Scholar]
- Guo, G.L.; Qian, X.K.; Gruver, W.A. Multi-Function Mechanical Hand. U.S. Patent 5378033A, 3 January 1995. [Google Scholar]
- Itoh, H. Mechanical hand. U.S. Patent 3927424, 21 January 1974. [Google Scholar]
- Jaworski, E. Humanlike Mechanical Finger for Prosthetic Hands and Massaging Device. U.S. Patent 0160873, 30 June 2011. [Google Scholar]
- Traverso, S.; Lince, A.; Laffranchi, M.; de Michieli, L.; Boccardo, N. An Underactuated Prosthetic Hand. W.O. Patent 215577 A1, 14 November 2019. [Google Scholar]
- Masahiro, I.; Hiroshi, Y. Prosthetic Finger. J.P. Patent 146998A, 20 August 2015. [Google Scholar]
- Akyürek, E.; Kalganova, T.; Mukhtar, M.; Paramonov, L.; Steele, L.; Simko, M.; Kavanagh, L.; Nimmo, A.; Huynh, A. Design and Development of Low Cost 3D Printed Ambidextrous Robotic Hand Driven by Pneumatic Muscles. Int. J. Eng. Tech. Res. 2014, 2, 179–188. [Google Scholar]
- Laliberte, T.; Baril, M.; Guay, F.; Gosselin, C. Towards the design of a prosthetic underactuated hand. Mech. Sci. 2010, 1, 19–26. [Google Scholar] [CrossRef]
- Baril, M.; Laliberte, T.; Gosselin, C.; Routhier, F. On the Design of a Mechanically Programmable Underactuated Anthropomorphic Prosthetic Gripper. J. Mech. Des. 2013, 135, 121008. [Google Scholar] [CrossRef]
- George, L.E. Artificial Finger. U.S. Patent 2867819, 13 January 1959. [Google Scholar]
- Carrozza, M.; Suppo, C.; Sebastiani, F.; Massa, B.; Vecchi, F.; Lazzarini, R.; Cutkosky, M.; Dario, P. The SPRING Hand: Development of a Self-Adaptive Prosthesis for Restoring Natural Grasping. Auton. Robot. 2004, 16, 125–141. [Google Scholar] [CrossRef]
- Partial M Finger. Available online: https://www.college-park.com/partial-m-finger (accessed on 30 September 2020).
- Liberating Technologies. Available online: https://liberatingtech.com/ (accessed on 30 September 2020).
- Massey, P.L.; Stormon, L.T. Hand and Forearm Prostheses. U.S. Patent 4291421, 29 September 1981. [Google Scholar]
- Shirafuji, S.; Ikemoto, S.; Hosoda, K. Development of a tendon-driven robotic finger for an anthropomorphic robotic hand. Int. J. Robot. Res. 2014, 33, 677–693. [Google Scholar] [CrossRef]
- Xu, Z.; Todorov, E. Design of a Highly Biomimetic Anthropomorphic Robotic Hand. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3485–3492. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Mechanism | Notes | |
|---|---|---|---|
| [14,15,16] |  [14] |  [16] | One crossed FBL |
| [17,18] |  [17] |  [18] | Quite similar leverages |
| [19,20,21] |  [20] | Two coupled FBL | |
| Reference | Mechanism | Notes | |
|---|---|---|---|
| [22,23,24] |  [22] |  [24] | |
| [25,26] |  [25] |  [26] | |
| Reference | Mechanism | Notes | |
|---|---|---|---|
| [28,29] |   [28] | ||
| [30,31] |  [30] |  [31] | Guiding slot |
| [32] |   | Three-Bar linkage | |
| Reference | Mechanism | Notes | |||
|---|---|---|---|---|---|
| [36], adapted from [37,38,39] |  |  |  |  | Presence of a passive rotative driving element |
| [36] | adapted from [37] | [38] | [39] | ||
| [40] |  | ||||
| [41,42] |  |  | Both with linear rod and torsional spring | ||
| [41] | [42] | ||||
| Adapted from [43] |  | ||
| [44,45] |  |  | Passive element on coupler. One FBL |
| Adapted from [44] | [45] | ||
| Adapted from [46,47] |  |  | Adaptive bar linkage |
| Adapted from [46] | [47] | ||
| [48,49] |  |  | 2 FBL: one is crossed |
| [48] | [49] | ||
| [50] |   © 2020 IFAC. Reproduced with permission from IFAC-Proceedings Volumes, 44,1, pg 8097. |
| [51] |  |
| Reference | Mechanism | Notes |
|---|---|---|
| [52] |    |
| [41] |  |
| [40] |  |
| [53] |  |
| Adapted from [54] |  |
| Adapted from [55] |  |
| [57] |  |
| [58,59] |  |  | modified LARM hand |
| [58] | [59] | ||
| Adapted from [60] |  | ||
| Adapted from [61,62] |  |  | |
| Adapted from [61] | [62] | ||
| Adapted from [63] |  | ||
| [64] |  | ||
| Reference | Mechanism | Notes | |||
|---|---|---|---|---|---|
| [65,66] |  |  | |||
| [65] | [66] | ||||
| [67,68] |  |  | Passive prosthesis with back-drivable mechanism | ||
| [67] | [68] | ||||
| [69,70,71] |  |  |  | Under actuation from the wrist using gears and leverages | |
| [69] | [70] | [71] | |||
| [72,73,74,75,76,77,78,79,80,81,82] |  |  |  | Cable driven prosthesis | |
| [72] | [73] | [74] | |||
| Index | Type | Mechanism | N. Phalanges–Links | SA | NM | Pros | Cons | Notes | |
|---|---|---|---|---|---|---|---|---|---|
| One dof mechanism | [14] | EP | One C-FBL | 2–3 | ✓ | Basic | No High force | ||
| [15] | EP | One C-FBL | 2–3 | ✓ | No back-drivable mechanism limits Force | ||||
| [16] | BP MCPd | One C-FBL | 2–4 | ✓ | Follow NM of finger next to it, Basic | Its motion is completely dependent | Similar to [31] and [36] | ||
| [17] | EP | Two C-FBL | 3–6 | ✓ | Mimic NM | ||||
| [18] | BP MCPd | One C-FBL | 3–6 | ✓ | Dog “N” locking system | Similar to [41] | |||
| [19] | EP | Two C-FBL | 3–5 | ✓ | Hook grasp, 3DP | Easy Ejection | |||
| [20] | EP | Two C-FBL | 3–5 | ✓ | Mimic NM | Similar to [44] | |||
| [21] | EP | Stackable FBL | 3–20 | ✓ | Mimic NM | Complex | |||
| [22,23] | BP PIPd | One C-FBL | 2–4 | ✓ | Compact, wrap around, 3DP, adaptable, slenderness (Y-shaped), hard-stops | Shims, limit adaptability (Y-shaped) | |||
| [25] | BP | Two C-FBL | 3–6 | ✓ | Same as [22], improved NM | More complex | |||
| [28] | BP PIPd | One C-FBL | 2–4 | ✓ | Same as [22], Cable and spring hinges for improving NM | Same disadvantages of Y-shaped [22] | |||
| [30] | EP | One C-FBL | 2–3 | ✓ | Accurate motion | Wear of guiding slot | |||
| [31] | EP | One C-FBL | 2–4 | ✓ | Joint lock to switch mode | ||||
| [32] | EP | One C-3BL | 2–3 | ✓ | Less energy dissipation, compact, light | Narrow range of adaptability due to link’s stiffness |
| Index | Type | Mechanism | N. Phalanges–Links | SA | NM | Pros | Cons | Notes | |
|---|---|---|---|---|---|---|---|---|---|
| One underactuated dof mechanism | [36] | EP | Two C-FBL | 3–5 | ✓ | ✓ | Light, compact, whiffle-tree SA mechanism | SA between only two phalanges, no natural uncurling motion | |
| [37] | EP | One C-FBL, One multi-bar | 3–6 | ✓ | ✓ | Good grasp | SA and NM between only two phalanges | ||
| [38] | EP | One U-FBL, One C-FBL, One DPGS | 3–7 | ✓ | ✓ | Accurate motion | Bulky, UA strongly depend on spring property | ||
| [39] | EP | One FBL (balancing arm, slider) | 3–7 | ✓ | ✓ | Whiffle-tree SA mechanism | SA between only two phalanges | Similar to [36], [37] and 25 | |
| [40] | EP | One U-FBL | 2–4 | ✓ | Basic, light | UA strongly depends on spring property | |||
| [41] | EP | Sliding Block | 2–4 | ✓ | Indirect UA | Bulky | |||
| [42] | EP | Screw nut and a slider | 2–6 | ✓ | ✓ | Compact | Complicated assembly: too mates in narrow space | Similar to [41] | |
| [43] | EP | One U-FBL, One C-FBL | 2–6 | ✓ | ✓ | Mimic NM, can switch drive link | Same as [40] about spring, bulky | ||
| [44] | EP | One U-FBL | 2–4 | ✓ | Adjustable compliance | ||||
| [45] | EP | One U-FBL, One C-FBL | 2–4 | ✓ | ✓ | Same as [43], unable to switch drive link, limited range of motion | |||
| [46] | EP | One adaptive C-FBL, One C-FBL | 3–8 | ✓ | ✓ | Performs precision and power grasp | Same as [43], SA between only two phalanges | ||
| [47] | BP | One FBL | 2–4 | ✓ | ✓ | Ease of use | SA between only two phalanges | Similar to [46] | |
| [48] | EP | One U-FBL, One C-FBL | 3–6 | ✓ | ✓ | Same as [43] | |||
| [49] | BP | Rack, gears, belts, slider | 3–8 | ✓ | Accurate UA motion | UA strongly depend on spring property, complicated assembly | |||
| [50] | EP | One spingle and nut, One balancing arm | 3–7 | ✓ | ✓ | Accurate motion | Depends on torsional spring property | ||
| [51] | BP | Two C-FBL | 3–7 | ✓ | ✓ | Accurate motion, compact | SA between only two phalanges | Similar to [48] |
| Index | Type | Mechanism | N. Phalanges–Links | SA | NM | Pros | Cons | Notes | |
|---|---|---|---|---|---|---|---|---|---|
| Multi-dof mechanism | [40] | EP | Two U-FBL | 3–7 | ✓ | Performs precision and power grasp | Modular embodiment of model [40] | ||
| [41] | EP | Sliding Block | 3–7 | ✓ | No NM | Modular embodiment of model [41] | |||
| [52] | BP MCPd | Two U-5BL, One C-FBL | 3–9 | ✓ | ✓ | SA and NM with a BP prostheses | Unable to perform grasp of fragile object, UA depends on torsional springs properties | ||
| [53] | EP | Two U-FBL and a guiding slut | 3–15 | ✓ | ✓ | Performs precision and power grasp | Bulky, complex | Use a micro-motor to switch grasp type | |
| [54] | EP | Parallelogram linkage | 3–10 | ✓ | ✓ | All DOFs are actuated by motors | |||
| [55] | EP | Two U-FBL, One spherical 5BL | 3–11 | ✓ | 4 DOFs allow abduction and adduction | Complex | |||
| [57] | EP | Two U-FBL | 3–7 | ✓ | Highly adaptive mech | Bulky | |||
| [58] | EP | Two U-FBL | 3–8 | ✓ | ✓ | Good SA | Bulky and complex | Upgraded version of LARM [20] | |
| [59] | EP | Two slider-crank FBL | 3–6 | ✓ | ✓ | Less bulky than [59], more ease solution | UA strongly depends on spring property | Upgraded version of LARM [20] | |
| [60] | EP | Two U-FBL | 3–9 | ✓ | ✓ | UA strongly depends on three springs properties and their compliance ratio | |||
| [61] | EP | Two U-FBL | 3–7 | ✓ | ✓ | UA strongly depends on three springs properties, bulky | NM conf. named caging grasp | ||
| [62] | EP | Linkage system | 3–11 | ✓ | ✓ | Mimic NM, can switch drive link | Bulky, spring depending properties | Three-joints version of [41], similar to [61] | |
| [63] | EP | Linkage system | 3–5 | ✓ | Less complex and bulky | UA strongly depends on two springs properties | Similar to [40] | ||
| [64] | EP | Linkage and gear system | 3–10 | ✓ | ✓ | Accurate motion, NM and SA if switch element is activated | Sosfisticated, no NM if switch element is locked |
| Index | Type | Mechanism | N. Phalanges–Links | SA | NM | Pros | Cons | Notes | |
|---|---|---|---|---|---|---|---|---|---|
| Miscellaneous | [65,66] | EP | One C-FBL | 2–3 | ✓ | Compact, basic | Passive version with one or two joints | ||
| [67] | BP | Spring joints linkage | 3–3 | ✓ | Adaptable | Passive | |||
| [68] | BP | Interlocking mech. | 1 | Slenderness, compact, light, ease solution | Friction, passive | ||||
| [69] | EP | Linkage and gears system | 3 | ✓ | Basic, ease solution | Motion comes from gears on palm | |||
| [70] | EP | One FBL. Gears | 3 | ✓ | ✓ | Accurate motion | Same as 40, easy ejection, bulky | SA obtained by wrist | |
| [71] | EP | Linkage system | 2/3–15/17 | ✓ | ✓ | Able to avoid obstacles | Bulky, ease ejection | ||
| [72,73,74,75,76,77,78,79,80,81,82] | BP | Tendon-actuated | 3 | ✓ | ✓ | Slenderness, compact, light, ease solution | Complex routing scheme and manufacturing process | ||
| [81] | BP | Tendon-actuated | 3 | ✓ | ✓ | Slenderness, compact, light, ease solution | Aesthetic not recovered |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Difonzo, E.; Zappatore, G.; Mantriota, G.; Reina, G. Advances in Finger and Partial Hand Prosthetic Mechanisms. Robotics 2020, 9, 80. https://doi.org/10.3390/robotics9040080
Difonzo E, Zappatore G, Mantriota G, Reina G. Advances in Finger and Partial Hand Prosthetic Mechanisms. Robotics. 2020; 9(4):80. https://doi.org/10.3390/robotics9040080
Chicago/Turabian StyleDifonzo, Erasmo, Giovanni Zappatore, Giacomo Mantriota, and Giulio Reina. 2020. "Advances in Finger and Partial Hand Prosthetic Mechanisms" Robotics 9, no. 4: 80. https://doi.org/10.3390/robotics9040080
APA StyleDifonzo, E., Zappatore, G., Mantriota, G., & Reina, G. (2020). Advances in Finger and Partial Hand Prosthetic Mechanisms. Robotics, 9(4), 80. https://doi.org/10.3390/robotics9040080