Human-Like Arm Motion Generation: A Review


Abstract
1. Introduction
2. Literature Review
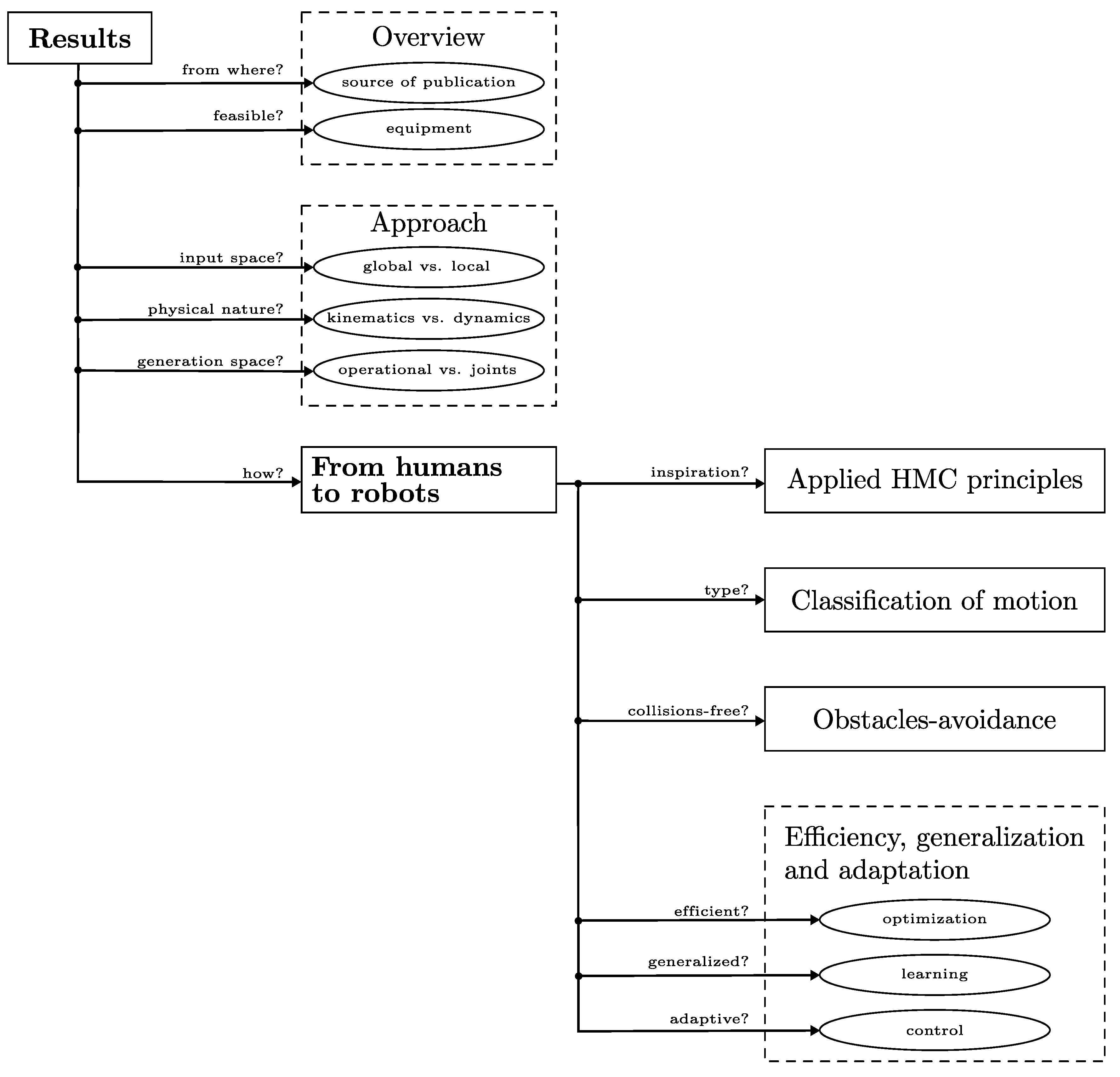
3. Results
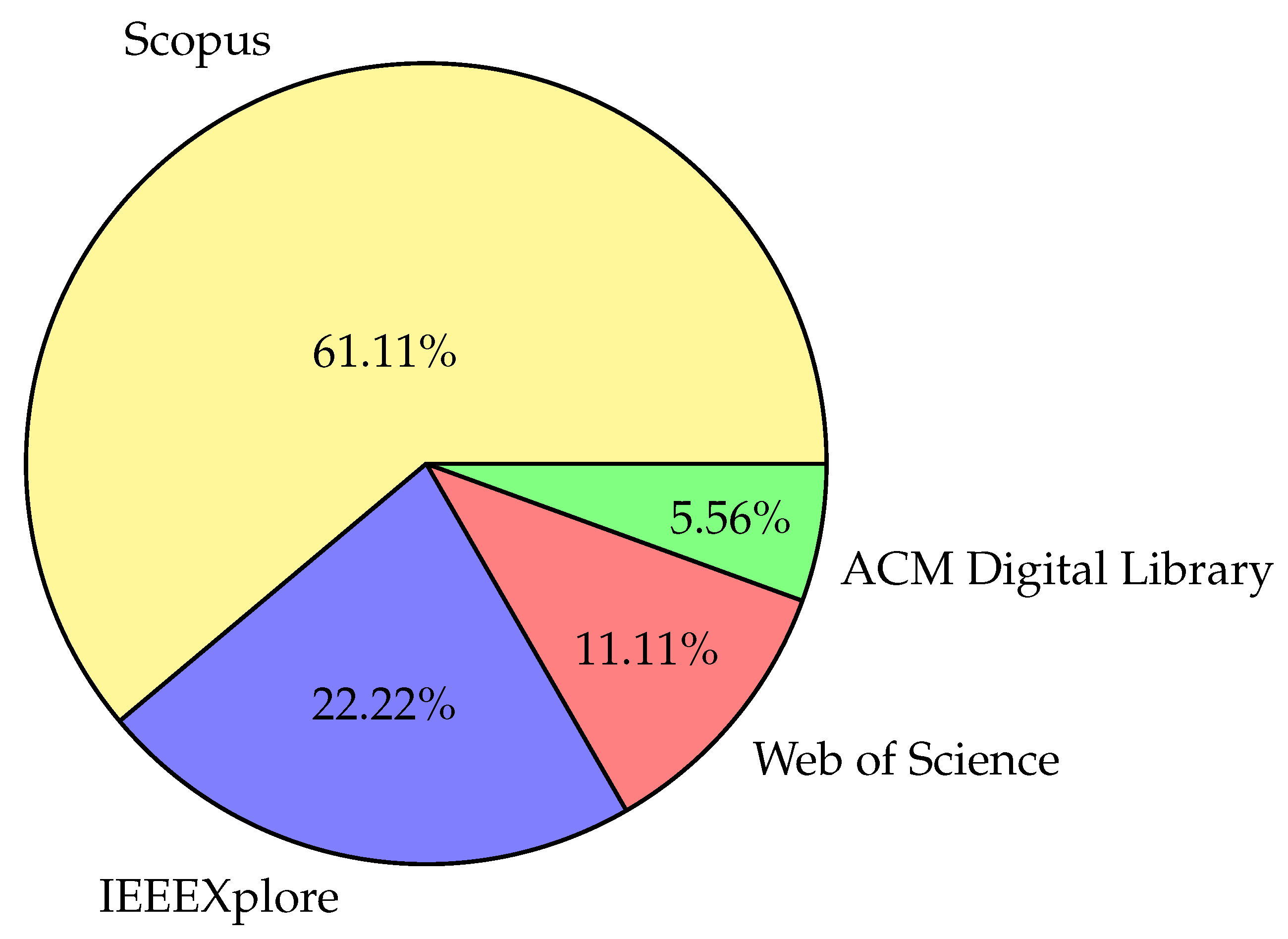
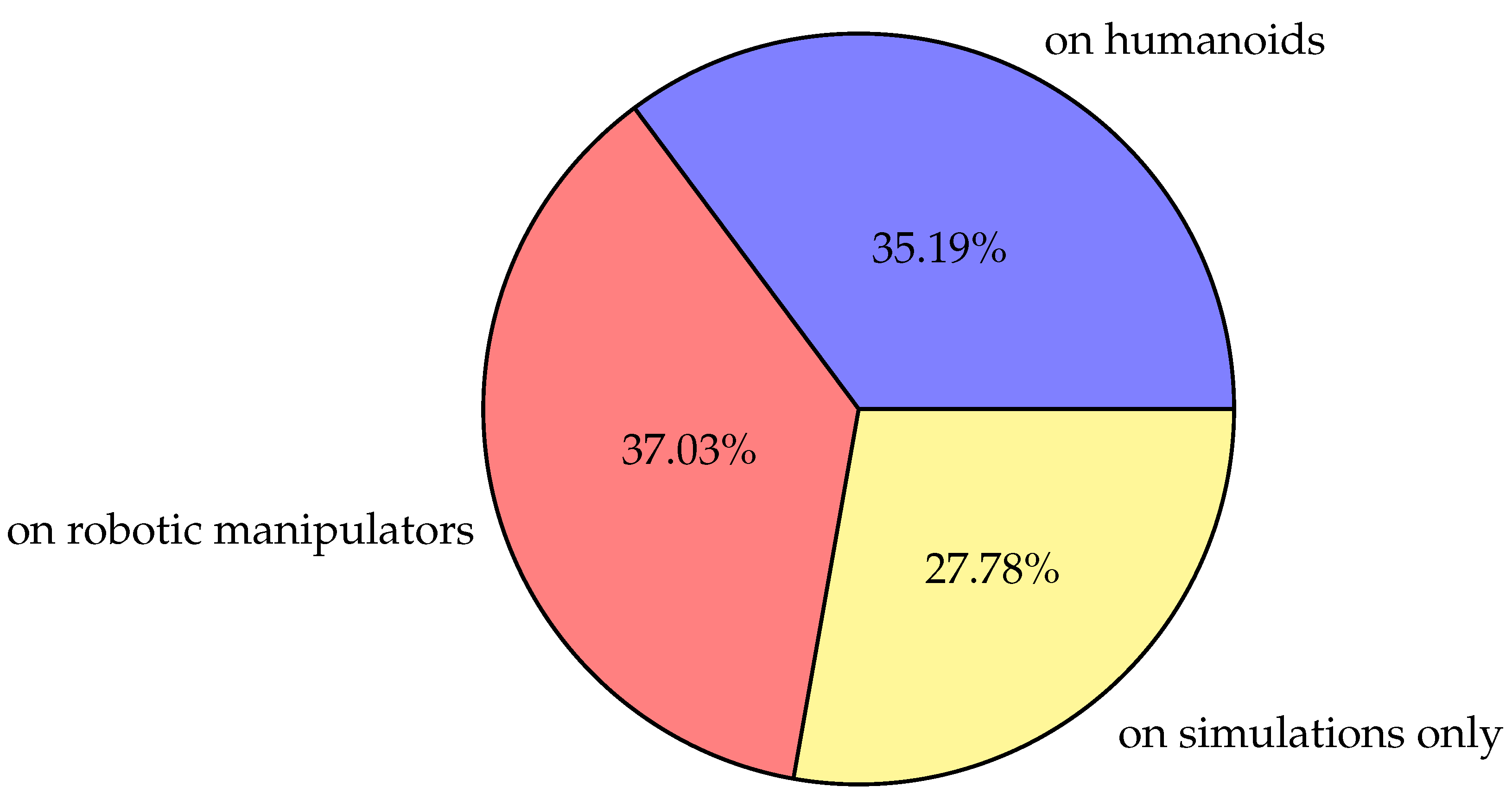
3.1. Overview of the Results
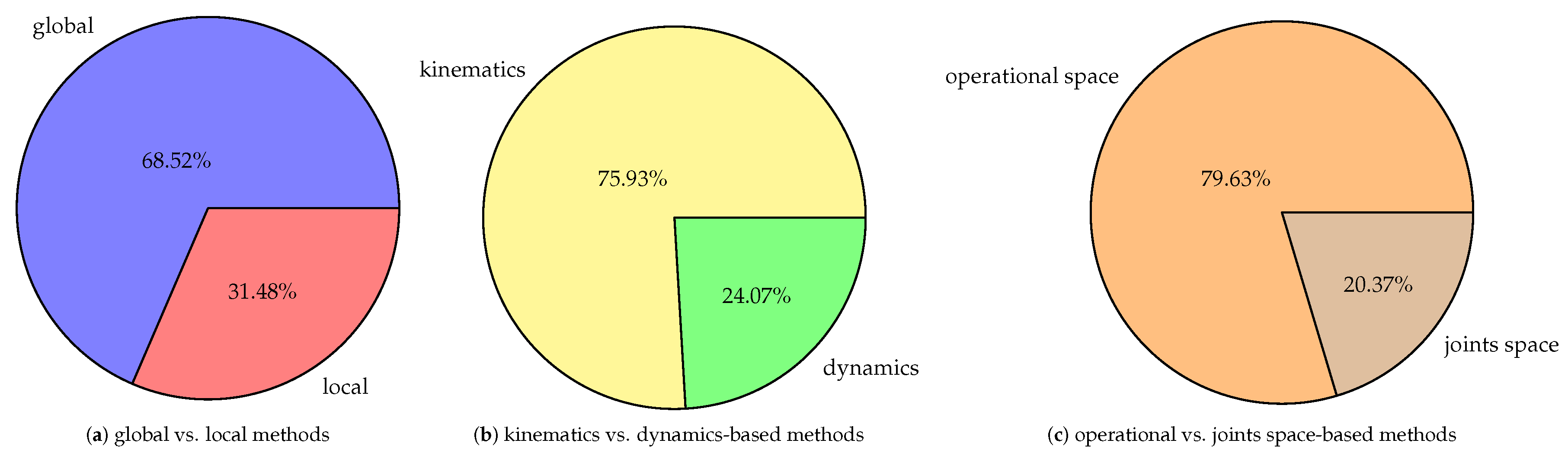
3.2. General Insights on Approaching Human-Likeness of Arm Motion
3.3. From Humans to Robots
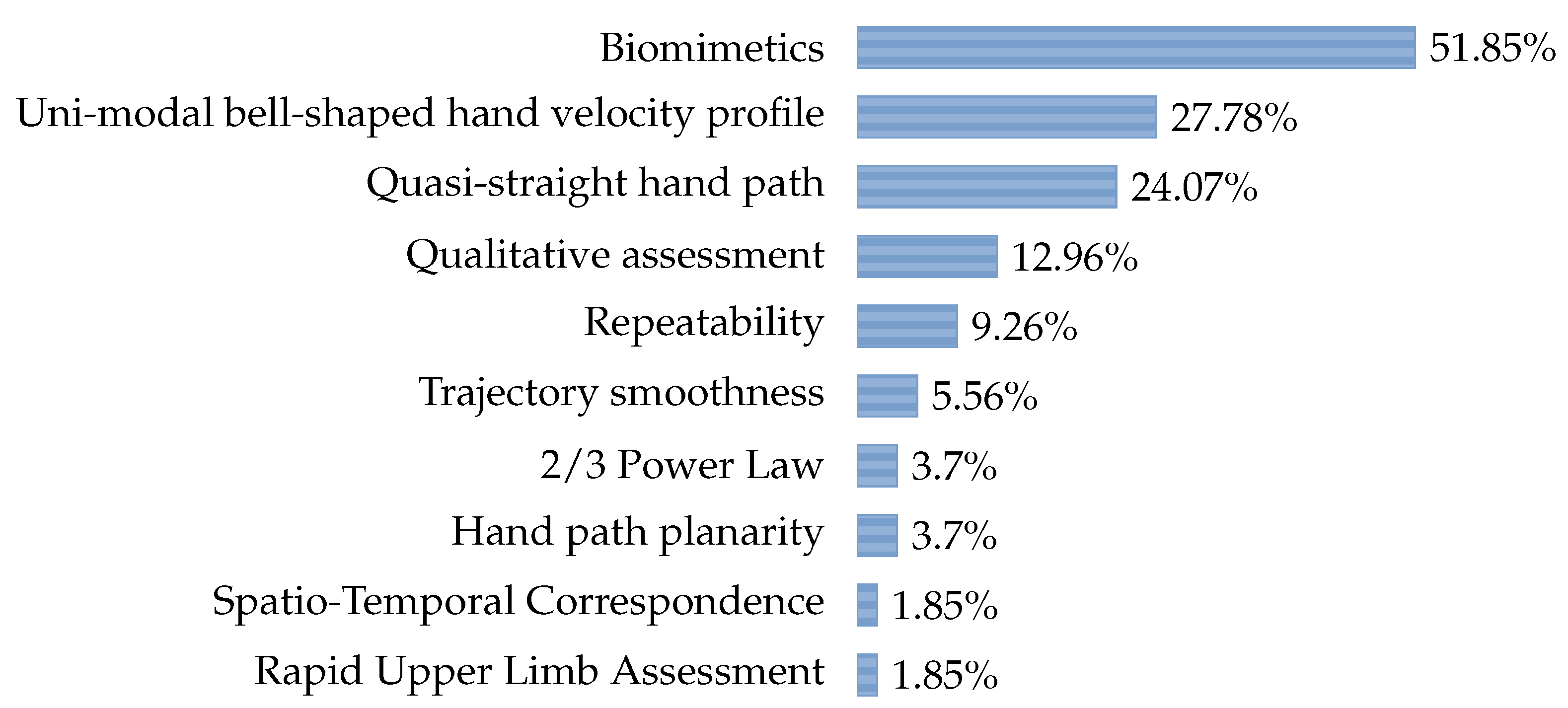
3.3.1. Applied Principles of Human Motor Control
Biomimetics
Kinematic Assessment of the End-Effector Trajectory
Qualitative Assessment
Repeatability
Trajectory Smoothness
2/3 Power Law
Hand Path Planarity
Spatio-Temporal Correspondence (STC)
Rapid Upper Limb Assessment (RULA)
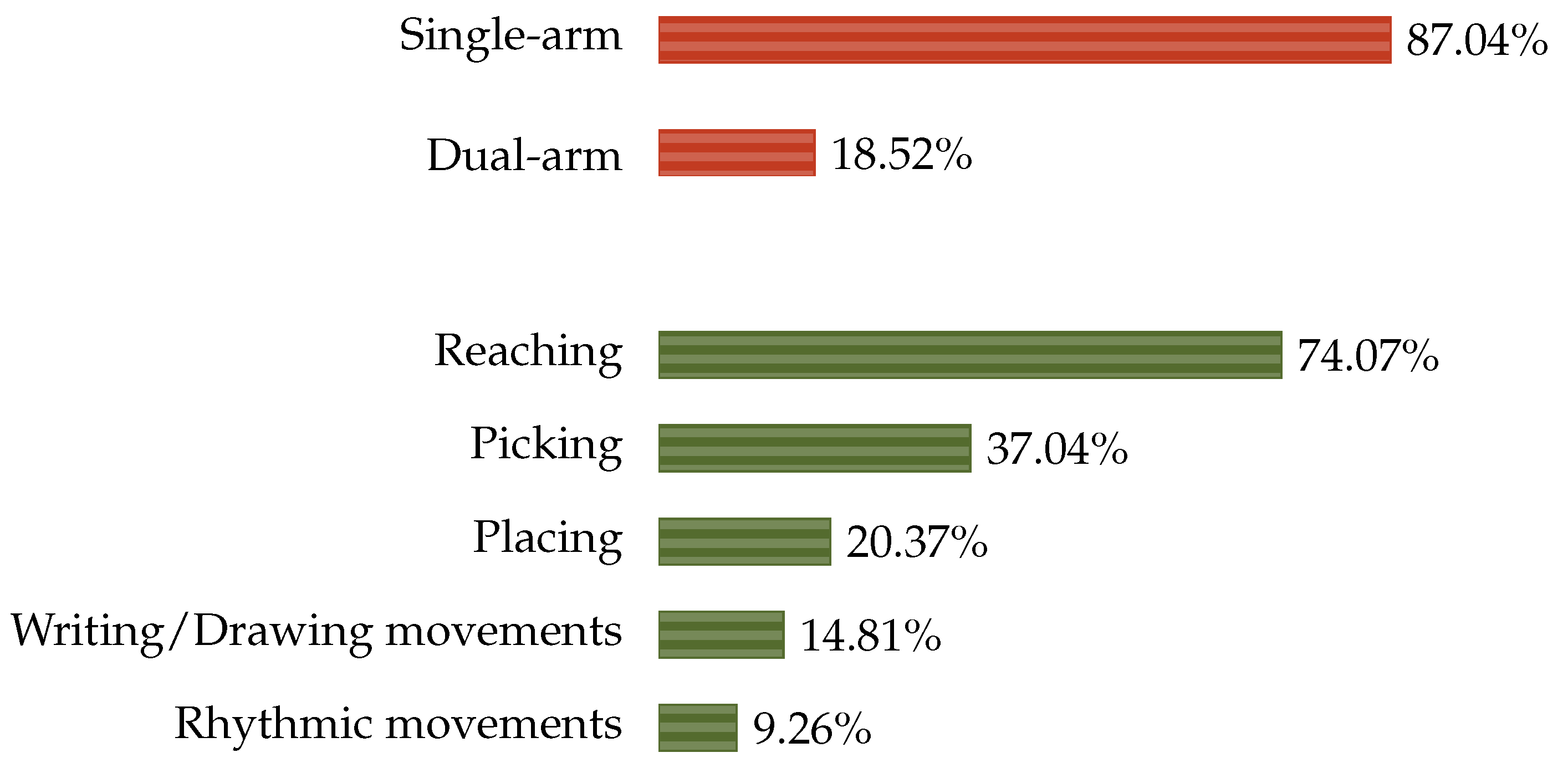
3.3.2. Classification of the Generated Human-Like Arm Movements
3.3.3. Obstacles-Avoidance in Human-Like Arm Motion Generation
3.3.4. Efficient, Generalized, and Adaptive Human-Like Arm Motion Generation
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Authors | Year | Type of Robot | Approach | Human-Like Metrics | Types of the Generated Movements | Key Features of the Proposed Method |
|---|---|---|---|---|---|---|
| Kim et al. [40] | 2006 | humanoid | global; kinematic; operational space | biomimetics | single-arm; dual-arm; reaching | A Response Surface Methodology (RSM) allows the estimation of human swivel angles during reaching in order to solve the inverse kinematics of a 6-DOFs robotic arm in a closed-form. |
| Caggiano et al. [115] | 2006 | simulated | global; kinematic; operational space | biomimetics | single-arm; writing | A closed-loop inverse kinematic algorithm is tuned to mimic recorded human hand writing by a simulated 7-DOFs arm with human-like dimensions. |
| Arimoto and Sekimoto [51] | 2006 | manipulator | local; dynamic; operational space | kinematic assessment | single-arm; reaching | A control law based on the Virtual Spring-Damper hypothesis is proposed to solve the Bernstein’s Degree-of-Freedom problem and tested on bi-dimensional and three-dimensional reaching motion. |
| Kim et al. [42] | 2007 | humanoid | global; kinematic; operational space | biomimetics | single-arm; reaching | The regeneration of human-like arm motion enhances HRI through the engagement of the human attention by suitably changing motion direction and scaling its magnitude. |
| Yang et al. [116] | 2009 | manipulator | local; dynamic; operational space | repeatability | single-arm; reaching; rhythmic | A biologically-inspired dynamic controller combines a Virtual Spring-Damper hypothesis and neural oscillators in the joints space to achieve human-like reaching and rhythmic arm motion. |
| Artemiadis et al. [117] | 2010 | manipulator | local; kinematic; operational space | biomimetics | single-arm; reaching | The inter-joints dependency of human arm reaching is probabilistically modeled and maximized by a closed-loop inverse kinematic algorithm. |
| Park and Kim [91] | 2010 | simulated | global; dynamic; joints space | biomimetics | single-arm; pick | A clustered database structure is built off-line by applying an evolutionary process on captured human arm motion to collect torque efficient movement primitives. |
| Pattacini et al. [118] | 2010 | humanoid | local; kinematic; operational space | kinematic assessment; trajectory smoothness | single-arm; reaching; rhythmic | A multi-referential Cartesian controller follows the minimum-jerk principle in both operational and joints spaces to ensures typical human-like hand kinematic behavior and robustness against singularities. |
| Yang et al. [68] | 2010 | manipulator | local; dynamic; operational space | repeatability | single-arm; rhythmic | The coupling between a virtual spring-damper and human-like Central Pattern Generators (CPGs) at the joints is proposed to achieve cyclic motion and adapt to external perturbations. |
| Albrecht et al. [84] | 2011 | humanoid | global; dynamic; joints space | biomimetics | single-arm; reaching | A bilevel optimization is applied to imitate clustered human arm reaching movements: the best imitation performance results from the combination of typical human-like minimization principles. |
| Bae et al. [97] | 2011 | manipulator | local; dynamic; operational space | repeatability | single-arm; rhythmic | The Virtual Spring-Damper controller [51] is augmented with the capability of generating human-like energy efficient arm reaching motion by introducing, at the level of the joints, a human muscle tension effect under the gravity. |
| Silva et al. [85] | 2011 | humanoid | global; kinematic; joints space | kinematic assessment | single-arm; pick; reaching | Single-arm human-like manipulation is achieved by the selection of optimal goal and bounce arm configurations, which are composed to obtain minimum-jerk collisions-free trajectories. |
| Xie et al. [76] | 2011 | manipulator | global; kinematic; joints space | kinematic assessment | single-arm; pick; reaching | Based on the introduction of Target Arm Poses (TAPs), a human-like arm-hand motion planner that solves the inverse kinematic problem at a jerk level is proposed and tested in scenarios cluttered with obstacles. |
| Bhattacharjee et al. [119] | 2011 | simulated | local; dynamic; operational space | kinematic assessment | single-arm; reaching; writing | A control scheme, which takes inspiration from the human muscle damping and stiffness properties, proposes the formulation of a bijective function that uniquely maps the joint actuators to time-varying weights that simulate brain-muscles communication delays. |
| Rosell et al. [74] | 2011 | manipulator | global; kinematic; operational space | biomimetics | single-arm; reaching | A human-like sampling is proposed for grasping in presence of obstacles. From recorded human hand motion, inter-fingers coordination is extracted to reduce the dimensionality of finger motion sampling, while the motion of the end-effector is planned under palm orientating constraints. |
| Zacharias et al. [65] | 2011 | humanoid | global; kinematic; operational space | qualitative assessment; RULA | single-arm; pick; place; reaching | The ergonomic RULA criterion is used to identify regions of the workspace with human-like RULA scores, which guide the inversion of the kinematics, as well as any sampling-based planning, towards the selection of ergonomic configurations. |
| Fu et al. [35] | 2012 | simulated | global; dynamic; operational space | kinematic assessment | single-arm; reaching | Motor synergies of a 3-DOFs human-like arm are studied to reduce the dimensionality of an optimal control problem for the generation of reaching planar movements. A human-like time parametrization of the motion is also considered. |
| Shukla and Billard [92] | 2012 | humanoid | local; kinematic; operational space | biomimetics | single-arm; pick | A Coupled Dynamical System (CDS) is proposed and learned by demonstrations of human grasping movements. The coupling of hand motion and aperture of the fingers is mimicked and stable to fast perturbations of the target in the operational space. |
| Strauss and Heinke [120] | 2012 | manipulator | local; kinematic; operational space | kinematic assessment | single-arm; reaching | Dynamical Neural Fields are proposed to generate planar reaching motion for a 2-DOFs arm, which exhibited a human-like kinematic behavior of the end-effector. |
| Taïx et al. [36] | 2013 | humanoid | global; dynamic; operational space | kinematic assessment | single-arm; reaching | The biological model of antagonist muscles is applied for the generation of human-like reaching motion. The control variables are optimally selected in order to minimize the energy of the moto-neuronal signals over the duration of a movement. |
| Gielniak et al. [27] | 2013 | humanoid | global; dynamic; joints space | biomimetics; STC | single-arm; dual-arm; reaching | Human-like arm motion is generated by the maximization of a Spatio-Temporal Correspondence (STC) with a set of task-related exemplar trajectories that are tracked from human agents. |
| Wang and Artemiadis [121] | 2013 | simulated | global; kinematic; operational space | biomimetics | single-arm; reaching | Every-day human reaching movements are captured to estimate human swivel angle values and propose a closed-form of the inverse kinematic algorithm for anthropomorphic robotic arms. |
| Li et al. [66] | 2013 | simulated | global; kinematic; operational space | biomimetics | single-arm; writing | Three methods are implemented and compared to replicate human hand writing and drawing capabilities and suggest how handwriting actions might be encoded in the Central Nervous System. |
| Rano and Iossifidis [31] | 2013 | simulated | local;kinematic; operational space | hand path planarity | single-arm; reaching; pick | A dynamical systems approach, which represents targets as attractors and obstacles as repellors, is proposed to generate human-like arm reaching. |
| Rosado et al. [69] | 2013 | simulated | global; kinematic; operational space | biomimetics | single-arm; dual-arm; reaching | A Kinetic-based motion capture method is proposed to transfer human arm motion onto a simulated upper-body humanoid system equipped with a 4-DOFs right arm and a 7-DOFs left arm. |
| Dragan and Srinivasa [54] | 2014 | humanoid | global; kinematic; joints space | qualitative assessment | single-arm; pick | Legible arm motion is generated to enhance the intentionality of robotic actions and improve non-verbal communication with human partners in shared workspaces with multiple possible targets. |
| Atawnih et al. [52] | 2014 | manipulator | local; dynamic; operational space | kinematic assessment | single-arm; reaching | A redundant arm torque controller capable of imitating a human-like kinematic behavior during reaching is proposed. Its compliant properties allow a safe physical human-robot interaction. |
| Stefanovic and Galiana [98] | 2014 | manipulator | local; kinematic; operational space | kinematic assessment | single-arm; reaching | Planar reaching motion with human-like kinematic behavior of the end-effector is generated by a spinal-like controller, which finds biological inspiration in the spinal motor circuits of primates. |
| Xia et al. [122] | 2014 | simulated | global; kinematic; operational space | biomimetics | single-arm; reaching | A novel method to compute swivel angle values under the physical limits of the joints is proposed starting from biomimetic studies of the human arm. The resulting feasible regions constrain the optimal selection of arm configurations for human-like motion generation. |
| Zhao et al. [43] | 2014 | manipulator | global; kinematic; operational space | biomimetics | single-arm; pick; reaching | A novel planner named Gradient Projection Method Rapidly-exploring Random Trees (GPM-RRT) is proposed to generate human-like arm trajectories that minimize gravitational energy, muscular elastic energy and wrist discomfort in case of grasping. |
| Gulletta et al. [70] | 2015 | humanoid | global; kinematic; joints space | kinematic assessment | dual-arm; pick; place; reaching | Based on psychological evidence in human motor control, a human-like bi-manual synchronous motion planner is proposed as an extended framework of the single-arm solution presented by Silva et al. [85]. |
| Hugues et al. [62] | 2015 | simulated | global; kinematic; operational space | qualitative assessment; 2/3 power law | single-arm; rhythmic | User studies on the subjective perception of human-like motion are performed to compare different strategies for transferring motion onto virtual robots, which operate in an industrial-like scenario. |
| Lamperti et al. [22] | 2015 | humanoid | global; kinematic; operational space | qualitative assessment | single-arm; dual-arm; reaching | A redundancy resolution method for dual-arm motion generation that minimizes the muscular effort of the manipulation chain is presented. A fitting algorithm also permitted to extract the relationships between the task and the redundancy variables (swivel angles). |
| Liu et al. [123] | 2015 | simulated | global; kinematic; operational space | biomimetics | single-arm; reaching | A reinforcement learning algorithm with an adaptive noise exploration strategy is proposed to learn the shape and the goal parameters of dynamical movement primitives, which compose energy-efficient and collisions-free arm trajectories. |
| Shin and Kim [71] | 2015 | humanoid | global; dynamic; operational space | biomimetics | dual-arm; pick; place; reaching | An imitation learning technique from captured human dual-arm motion is proposed and applied for the generation of novel robotic arm trajectories. A controller based on a virtual dynamics model refers to the planned trajectories for the bi-manipulation of one object. |
| Silva et al. [86] | 2015 | humanoid | global; kinematic; joints space | kinematic assessment | single-arm; pick; place; reaching | A method for generating human-like asynchronous bi-manual movements is proposed and based on the sequential selection of optimal configurations for both arms of a humanoid robot. |
| Suarez et al. [72] | 2015 | simulated | global; kinematic; operational space | biomimetics | dual-arm; pick; place; reaching | A principal component analysis is applied to extract the synergies of captured dual-arm human motion and identify the major dispersion of human activity. The most significant components define Principal Movement Directions (PMDs), which guide sampling-based planners to generate human-like arm trajectories. |
| Xie and Zhao [124] | 2015 | manipulator | global; kinematic; operational space | qualitative assessment | single-arm; place | Optimal handing over positions for HRI are investigated and minimum hand jerk movements are generated by minimizing the gravitational energy and muscular effort. Via postures in the free joints space are suggested to guide sampling-based planners in obstacles-avoidance. |
| De Momi et al. [55] | 2016 | manipulator | global; kinematic; joints space | kinematic assessment; trajectory smoothness; 2/3 power law; qualitative assessment | single-arm; reaching | In order to generate human-like handover motion, four neural networks are trained on captured human reaching movements in a structured workspace. Starting from the Cartesian coordinates of a target, time duration and ten via points of a new trajectory are predicted. |
| Chen et al. [125] | 2016 | manipulator | local; kinematic; operational space | biomimetics; kinematic assessment | single-arm; reaching | Human-like hand reaching motion is formed by the composition of a high level of control, which applies the dynamics of two potential fields, and of a low level of control, which considers joints synergies of captured human self-reaching movements to solve the inverse kinematics of the manipulator in a closed form. |
| Kashima and Hori [53] | 2016 | simulated | global; kinematic; operational space | biomimetics; kinematic assessment | single-arm; reaching | A time adjustment of the elbow and shoulder relative motions modifies the formulation of the minimum angular jerk principle for the generation of human-like arm reaching movements. |
| Koskinopoulou and Trahanias [56] | 2016 | manipulator | global; kinematic; operational space | biomimetics; repeatability | single-arm; pick; place; reaching; writing | A novel Learning from Demonstrations (LfD) called IMFO (IMitation Framework by Observation) is proposed. Human observed actions are mapped onto a manipulator on a latent space of representation, which reduces the dimensionality of the motion and extracts small variations for a better generalization. |
| Togo et al. [99] | 2016 | simulated | local; dynamic; operational space | biomimetics; kinematic assessment | single-arm; reaching | An UnControlled Manifold (UCM) reference that incrementally minimizes joints torque and torque change is provided to an inverse dynamics controller for the generation of human-like arm reaching motion. |
| Liarokapis et al. [46] | 2017 | manipulator | global; kinematic; joints space | biomimetics | single-arm; pick; reaching | Three geometrical metrics of functional anthropomorphism are studied to reduce the dissimilarity in mapping captured human arm-hand motion onto redundant and hyper-redundant arms and multi-fingered robotic hands. |
| Zhao and Wei [126] | 2017 | manipulator | global; kinematic; operational space | biomimetics | single-arm; reaching | From captured human reaching and grasping motion, a hierarchical planning strategy (HPS) is proposed and a Bayesian network is learned to select one of three optimal human-like arm motion planning algorithms. |
| Alibeigi et al. [127] | 2017 | humanoid | global; kinematic; operational space | biomimetics | single-arm; reaching | A real-time human arm motion mimicking system is proposed. The null space of the Jacobian matrix is used to maintain a high joints-space similarity with the human movements and to respect the angular physical limits of the robot. |
| Liu et al. [77] | 2017 | simulated | global; kinematic; operational space | biomimetics | single-arm; pick; reaching | A wrist-elbow-in-line method is proposed to constrain and analytically solve the inverse kinematics of a manipulator starting from tracked human arm motion demonstrations. Extensions to obstacles-avoidance have been addressed. |
| Xu and Ding [63] | 2017 | simulated | global; kinematic; joints space | hand path planarity | dual-arm; place | Defined two planes of motion on which the wrists are moving, a synergic method for the human-like bi-manual transportation of one object is proposed and based on the planning of translations and the stabilization of orientations. |
| Chen et al. [29] | 2018 | humanoid | global; kinematic; joints space | biomimetics | dual-arm; pick; place; reaching | The application of a neural network auto-encoder with one hidden layer is proposed to reduce the dimensionality of the search space for sampling-based algorithms and mimic human dual-arm goal-directed actions. |
| Su et al. [128] | 2018 | manipulator | local; kinematic; operational space | biomimetics; qualitative assessment | single-arm; reaching | Human-like motion planning for anthropomorphic manipulators in tele-operated tasks is proposed. From captured human reaching movements, a regression function is trained to obtain feasible human-like swivel angles and solve the inverse kinematic problem in real-time. |
| Tomić et al. [20] | 2018 | humanoid | global; kinematic; operational space | biomimetics | dual-arm; pick; place; reaching | Human dual-arm manipulation actions are mimicked by optimally transferring the trajectories of real and virtual markers’ frames onto a humanoid robot. |
| Garcia et al. [73] | 2018 | humanoid | global; kinematic; operational space | biomimetics | dual-arm; pick | Synergies of dual-arm grasping are extracted from captured human motion in correlation with approaching actions towards the targets and used to partition the operational space for a better imitation in humanoid mobile platforms. |
| Su et al. [95] | 2019 | simulated | local; kinematic; operational space | biomimetics | single-arm; reaching | Improving the learning technique proposed by Su et al. [128], a deep convolutional neural network (DCNN) is applied to train a regression function that maps human swivel angles to hand target poses with smaller mean errors and higher robustness to noise. |
| Lauretti et al. [34] | 2019 | manipulator | local; kinematic; operational space | biomimetics; qualitative assessment | single-arm; reaching | A hybrid joint/Cartesian LfD approach based on Dynamical Motion Primitives that is capable of avoiding self collisions and obstacles is proposed. The two spaces are coupled by the Gradient Projection Method, which favors the Cartesian-space constraints of a given task. |
| Authors | Year | Algorithm | Test Scenario | Key Features of the Obstacles-Avoidance Mechanism |
|---|---|---|---|---|
| Silva et al. [85] | 2011 | Optimal bounce posture selection | Assembly-like | A back-and-forth movement is superimposed onto a minimum angular jerk trajectory. |
| Rosell et al. [74] | 2011 | PRM [75] | Grasping an object on a table cluttered with obstacles | The construction of a probabilistic roadmap is biased with a constrained orientation of the palm of the robotic hand. |
| Xie et al. [76] | 2011 | RRT-Connect [30] | Reaching movements through narrow passages | Target Arm Poses (TAPs) are defined in the crucial points of the expected path, which is divided in segments where the RRT-Connect algorithm is applied. |
| Zacharias et al. [65] | 2011 | RRT-Connect [30] | Pick-and-place tasks of cubes on a table in front of a humanoid robot | Configurations with human-like RULA scores are provided to initialize the IK solver and to bias the sampling routine of path planners, such as the RRT-Connect algorithm. |
| Rano and Iossifidis [31] | 2013 | Repellors dynamics | Picking on a table while avoiding objects along the path | An angle and a distance factors in relation with an obstacle and a relative positional factor between a target and an obstacle contribute in the formation of a repulsive vector field. |
| Dragan and Srinivasa [54] | 2014 | CHOMP [58] | Picking an object on a table with multiple possible target | A defined legibility functional replaces a classical cost function in the CHOMP algorithm, which ensures the generation of a collisions-free arm path. |
| Gulletta et al. [70] | 2015 | Optimal bi-manual bounce posture selection | Assembly-like | A bi-manual back-and-forth movement is superimposed onto a bi-manual minimum angular jerk trajectory. |
| Liu et al. [123] | 2015 | DMPs-based LfD algorithm | Reaching while avoiding a static spherical object | Shape and goal parameters of DMPs are learned from demonstrations of human reaching while avoiding one obstacle along the path. |
| Silva et al. [86] | 2015 | Optimal bounce posture selection | Assembly-like | A back-and-forth movement is superimposed onto a minimum angular jerk trajectory. |
| Suarez et al. [72] | 2015 | RRT-Connect [30] | Assembly-like | The identification of synergies in dual-arm manipulation tasks allows to run sampling-based planners on a human-like low dimensional space. |
| Xie and Zhao [124] | 2015 | FR-RRT [129] | Handing over a cube in presence of one obstacle | After the selection of an appropriate via posture that facilitates the avoidance of the obstacle, the end-effector trajectory follows an extended minimum jerk principle and is tracked by the FR-RRT algorithm. |
| Liu et al. [77] | 2017 | Analytical IK with human-like constraints | Avoidance of a moving spherical-like object | The flexibility of the wrist position is used to maintain the captured human swivel angle values. |
| Chen et al. [29] | 2018 | RRT-Connect [30] | Dual-arm manipulation with objects on a table | RRT-Connect is applied in the hidden layer of the proposed Auto-Encoder and the selected samples in this space are mapped onto the original space for the detection of collisions in the decoding process. |
| Garcia et al. [73] | 2018 | RRT-Connect [30] | Dual-arm grasping two objects on a table. | A modified RRT-Connect is proposed to generate collisions-free configurations that relates the torso postures with the robot position with respect of the human-like synergies of the captured motion. |
| Lauretti et al. [34] | 2019 | Joint/Cartesian DMPs | Reaching in presence of a static spherical obstacle | Distance-based terms are added to Joint and Cartesian DMPs to place the end-effector and each joint of the manipulator away from the obstacles in the workspace. |
References
- Sheridan, T.B. Human-Robot Interaction: Status and Challenges. Hum. Factors J. Hum. Factors Ergon. Soc. 2016, 58, 525–532. [Google Scholar] [CrossRef]
- Gladden, M.E. Who Will Be the Members of Society 5.0? Towards an Anthropology of Technologically Posthumanized Future Societies. Soc. Sci. 2019, 8, 148. [Google Scholar] [CrossRef]
- Fukuda, T.; Michelini, R.; Potkonjak, V.; Tzafestas, S.; Valavanis, K.; Vukobratovic, M. How far away is “artificial man”. IEEE Robot. Autom. Mag. 2001, 8, 66–73. [Google Scholar] [CrossRef]
- Schaal, S. The new robotics: Towards human-centered machines. HFSP J. 2007, 1, 115–126. [Google Scholar] [CrossRef]
- Fong, T.; Nourbakhsh, I.; Dautenhahn, K. A survey of socially interactive robots. Robot. Auton. Syst. 2003, 42, 143–166. [Google Scholar] [CrossRef]
- Wiese, E.; Metta, G.; Wykowska, A. Robots as intentional agents: Using neuroscientific methods to make robots appear more social. Front. Psychol. 2017, 8, 1–19. [Google Scholar] [CrossRef]
- Ray, C.; Mondada, F.; Siegwart, R. What do people expect from robots? In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 3816–3821. [Google Scholar]
- Welfare, K.S.; Hallowell, M.R.; Shah, J.A.; Riek, L.D. Consider the Human Work Experience When Integrating Robotics in the Workplace. In Proceedings of the 2019 14th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Daegu, Korea, 11–14 March 2019; pp. 75–84. [Google Scholar]
- Sebanz, N.; Bekkering, H.; Knoblich, G. Joint action: Bodies and minds moving together. Trends Cogn. Sci. 2006, 10, 70–76. [Google Scholar] [CrossRef] [PubMed]
- Bicho, E.; Louro, L.; Hipolito, N.; Erlhagen, W. A dynamic field approach to goal inference and error monitoring for human-robot interaction. In Proceedings of the International Symposium on New Frontiers in Human-Robot Interaction, Edinburgh, UK, 6–9 April 2009; pp. 31–37. [Google Scholar]
- Glasauer, S.; Huber, M.; Basili, P.; Knoll, A.; Brandt, T. Interacting in time and space: Investigating human-human and human-robot joint action. In Proceedings of the 19th International Symposium in Robot and Human Interactive Communication, Viareggio, Italy, 13–15 September 2010; pp. 252–257. [Google Scholar]
- Bicho, E.; Erlhagen, W.; Louro, L.; Costa e Silva, E. Neuro-cognitive mechanisms of decision making in joint action: A human-robot interaction study. Hum. Mov. Sci. 2011, 30, 846–868. [Google Scholar] [CrossRef] [PubMed]
- Koppenborg, M.; Nickel, P.; Naber, B.; Lungfiel, A.; Huelke, M. Effects of movement speed and predictability in human-robot collaboration. Hum. Factors Ergon. Manuf. Serv. Ind. 2017, 27, 197–209. [Google Scholar] [CrossRef]
- Tanizaki, Y.; Jimenez, F.; Yoshikawa, T.; Furuhashi, T. Impression Investigation of Educational Support Robots using Sympathy Expression Method by Body Movement and Facial Expression. In Proceedings of the 2018 Joint 10th International Conference on Soft Computing and Intelligent Systems (SCIS) and 19th International Symposium on Advanced Intelligent Systems (ISIS), Toyama, Japan, 5–8 December 2018; pp. 1254–1258. [Google Scholar]
- Erel, H.; Shem Tov, T.; Kessler, Y.; Zuckerman, O. Robots are Always Social. In Extended Abstracts of the 2019 CHI Conference on Human Factors in Computing Systems—CHI EA ’19; ACM Press: New York, NY, USA, 2019; pp. 1–6. [Google Scholar]
- Duffy, B.R. Anthropomorphism and the social robot. Robot. Auton. Syst. 2003, 42, 177–190. [Google Scholar] [CrossRef]
- Strait, M.K.; Floerke, V.A.; Ju, W.; Maddox, K.; Remedios, J.D.; Jung, M.F.; Urry, H.L. Understanding the Uncanny: Both Atypical Features and Category Ambiguity Provoke Aversion toward Humanlike Robots. Front. Psychol. 2017, 8, 1–17. [Google Scholar] [CrossRef] [PubMed]
- Silva, R.; Bicho, E.; Erlhagen, W. AROS: An anthropomorphic robot for human-robot interaction and coordination studies. In Proceedings of the CONTROLO 2008 Conference—8th Portuguese Conference on Automatic Control, UTAD, Vila Real, Portugal, 21–23 July 2008; pp. 819–826. [Google Scholar]
- Sandini, G.; Metta, G.; Vernon, D. The iCub Cognitive Humanoid Robot: An Open-System Research Platform for Enactive Cognition. In 50 Years of Artificial Intelligence; Springer: Berlin/Heidelberg, Germany, 2008; pp. 358–369. [Google Scholar]
- Tomić, M.; Chevallereau, C.; Jovanović, K.; Potkonjak, V.; Rodić, A. Human to humanoid motion conversion for dual-arm manipulation tasks. Robotica 2018, 36, 1167–1187. [Google Scholar] [CrossRef]
- Gouaillier, D.; Hugel, V.; Blazevic, P.; Kilner, C.; Monceaux, J.; Lafourcade, P.; Marnier, B.; Serre, J.; Maisonnier, B. The NAO humanoid: A combination of performance and affordability. arXiv 2008, arXiv:0807.3223v1. [Google Scholar]
- Lamperti, C.; Zanchettin, A.M.; Rocco, P. A redundancy resolution method for an anthropomorphic dual-arm manipulator based on a musculoskeletal criterion. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–3 October 2015; pp. 1846–1851. [Google Scholar]
- Kaneko, K.; Kanehiro, F.; Kajita, S.; Hirukawa, H.; Kawasaki, T.; Hirata, M.; Akachi, K.; Isozumi, T. Humanoid robot HRP-2. In Proceedings of the IEEE International Conference on Robotics and Automation, ICRA’04, New Orleans, LA, USA, 26 April–1 May 2004; pp. 1083–1090. [Google Scholar]
- Fuchs, M.; Borst, C.; Giordano, P.R.; Baumann, A.; Kraemer, E.; Langwald, J.; Gruber, R.; Seitz, N.; Plank, G.; Kunze, K.; et al. Rollin’ Justin—Design considerations and realization of a mobile platform for a humanoid upper body. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 4131–4137. [Google Scholar]
- Srinivasa, S.S.; Berenson, D.; Cakmak, M.; Collet, A.; Dogar, M.R.; Dragan, A.D.; Knepper, R.A.; Niemueller, T.; Strabala, K.; Vande Weghe, M.; et al. Herb 2.0: Lessons Learned From Developing a Mobile Manipulator for the Home. Proc. IEEE 2012, 100, 2410–2428. [Google Scholar] [CrossRef]
- You, B.J.; Kim, D.; Kim, C.; Oh, Y.H.; Jeong, M.H.; Oh, S.R. Network-based Humanoid ‘MAHRU’ as Ubiquitous Robotic Companion. IFAC Proc. Vol. 2008, 41, 724–729. [Google Scholar] [CrossRef]
- Gielniak, M.; Liu, K.; Thomaz, A. Generating human-like motion for robots. Int. J. Robot. Res. 2013, 32, 1275–1301. [Google Scholar] [CrossRef]
- Siciliano, B.; Sciavicco, L.; Villani, L.; Oriolo, G. Robotics, 1st ed.; Springer: London, UK, 2009. [Google Scholar]
- Chen, P.; Zhao, H.; Zhao, X.; Ge, D.; Ding, H. Dimensionality Reduction for Motion Planning of Dual-arm Robots. In Proceedings of the 2018 IEEE International Conference on Mechatronics and Automation (ICMA), Changchun, China, 5–8 August 2018; pp. 718–723. [Google Scholar]
- Kuffner, J.J.; LaValle, S.M. RRT-connect: An efficient approach to single-query path planning. In Proceedings of the 2000 ICRA, Millennium Conference, IEEE International Conference on Robotics and Automation, Symposia Proceedings (Cat. No.00CH37065), San Francisco, CA, USA, 24–28 April 2000; Volume 2, pp. 995–1001. [Google Scholar]
- Rano, I.; Iossifidis, I. Modelling human arm motion through the attractor dynamics approach. In Proceedings of the 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO), Shenzhen, China, 12–14 December 2013; pp. 2088–2093. [Google Scholar]
- Grimme, B.; Lipinski, J.; Schöner, G. Naturalistic arm movements during obstacle avoidance in 3D and the identification of movement primitives. Exp. Brain Res. 2012, 222, 185–200. [Google Scholar] [CrossRef]
- Ijspeert, A.J.; Nakanishi, J.; Hoffmann, H.; Pastor, P.; Schaal, S. Dynamical movement primitives: Learning attractor models for motor behaviors. Neural Comput. 2013, 25, 328–373. [Google Scholar] [CrossRef]
- Lauretti, C.; Cordella, F.; Zollo, L. A Hybrid Joint/Cartesian DMP-Based Approach for Obstacle Avoidance of Anthropomorphic Assistive Robots. Int. J. Soc. Robot. 2019, 11, 783–796. [Google Scholar] [CrossRef]
- Fu, K.C.D.; Nakamura, Y.; Yamamoto, T.; Ishiguro, H. Studies of motor synergies in generating optimal goal-directed movements in human-like robotic arm. In Proceedings of the 2012 IEEE International Conference on Robotics and Biomimetics (ROBIO), Guangzhou, China, 11–14 December 2012; pp. 808–813. [Google Scholar]
- Taïx, M.; Tran, M.T.; Souères, P.; Guigon, E. Generating human-like reaching movements with a humanoid robot: A computational approach. J. Comput. Sci. 2013, 4, 269–284. [Google Scholar] [CrossRef]
- Breteler, M.D.K.; Meulenbroek, R.G.J. Modeling 3D object manipulation: Synchronous single-axis joint rotations? Exp. Brain Res. 2006, 168, 395–409. [Google Scholar] [CrossRef] [PubMed]
- Rosenbaum, D.A.; Loukopoulos, L.D.; Meulenbroek, R.G.J.; Vaughan, J.; Engelbrecht, S.E. Planning reaches by evaluating stored postures. Psychol. Rev. 1995, 102, 28–63. [Google Scholar] [CrossRef] [PubMed]
- Wada, Y.; Kawato, M. A via-point time optimization algorithm for complex sequential trajectory formation. Neural Netw. 2004, 17, 353–364. [Google Scholar] [CrossRef] [PubMed]
- Kim, S.; Kim, C.; Park, J. Human-like Arm Motion Generation for Humanoid Robots Using Motion Capture Database. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 3486–3491. [Google Scholar]
- Zanchettin, A.M.; Rocco, P.; Bascetta, L.; Symeonidis, I.; Peldschus, S. Kinematic analysis and synthesis of the human arm motion during a manipulation task. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 2692–2697. [Google Scholar]
- Kim, C.; Kim, S.; Ra, S.; You, B.J. Regenerating human-like arm motions of humanoid robots for a movable object. In Proceedings of the SICE Annual Conference, Takamatsu, Japan, 17–20 September 2007; pp. 1081–1086. [Google Scholar]
- Zhao, J.; Xie, B.; Song, C. Generating human-like movements for robotic arms. Mech. Mach. Theory 2014, 81, 107–128. [Google Scholar] [CrossRef]
- Flash, T.; Hogan, N. The Coordination of Arm Movements: An Experimentally Confirmed Mathematical Model. J. Neurosci. 1985, 5, 1688–1703. [Google Scholar] [CrossRef] [PubMed]
- LaValle, S.M. Rapidly Exploring Random Trees: A New Tool For Path Planning; Technical Report; The Pennsylvania State University: State College, PA, USA, 1998. [Google Scholar]
- Liarokapis, M.; Bechlioulis, C.P.; Artemiadis, P.K.; Kyriakopoulos, K.J. Deriving Humanlike Arm Hand System Poses. J. Mech. Robot. 2017, 9, 1–11. [Google Scholar] [CrossRef]
- Jeannerod, M. The Timing of Natural Prehension Movements. J. Mot. Behav. 1984, 16, 235–254. [Google Scholar] [CrossRef]
- Rosenbaum, D.A.; Meulenbroek, R.J.; Vaughan, J.; Jansen, C. Posture-based motion planning: Applications to grasping. Psychol. Rev. 2001, 108, 709–734. [Google Scholar] [CrossRef]
- Pollick, F.E.; Maoz, U.; Handzel, A.A.; Giblin, P.J.; Sapiro, G.; Flash, T. Three-dimensional arm movements at constant equi-affine speed. Cortex 2009, 45, 325–339. [Google Scholar] [CrossRef] [PubMed]
- Morasso, P. Spatial control of arm movements. Exp. Brain Res. 1981, 42, 223–227. [Google Scholar] [CrossRef] [PubMed]
- Arimoto, S.; Sekimoto, M. Human-like movements of robotic arms with redundant DOFs: Virtual spring-damper hypothesis to tackle the Bernstein problem. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, Orlando, FL, USA, 15–19 May 2006; pp. 1860–1866. [Google Scholar]
- Atawnih, A.; Papageorgiou, D.; Doulgeri, Z. Reaching for redundant arms with human-like motion and compliance properties. Robot. Auton. Syst. 2014, 62, 1731–1741. [Google Scholar] [CrossRef]
- Kashima, T.; Hori, K. Control of biomimetic robots based on analysis of human arm trajectories in 3D movements. Artif. Life Robot. 2016, 21, 24–30. [Google Scholar] [CrossRef]
- Dragan, A.; Srinivasa, S. Integrating human observer inferences into robot motion planning. Auton. Robot. 2014, 37, 351–368. [Google Scholar] [CrossRef]
- De Momi, E.; Kranendonk, L.; Valenti, M.; Enayati, N.; Ferrigno, G. A Neural Network-Based Approach for Trajectory Planning in Robot-Human Handover Tasks. Front. Robot. AI 2016, 3, 1–10. [Google Scholar] [CrossRef]
- Koskinopoulou, M.; Trahanias, P. A methodological framework for robotic reproduction of observed human actions: Formulation using latent space representation. In Proceedings of the 2016 IEEE-RAS 16th International Conference on Humanoid Robots (Humanoids), Cancun, Mexico, 15–17 November 2016; pp. 565–572. [Google Scholar]
- Kalakrishnan, M.; Chitta, S.; Theodorou, E.; Pastor, P.; Schaal, S. STOMP: Stochastic trajectory optimization for motion planning. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 4569–4574. [Google Scholar]
- Zucker, M.; Ratliff, N.; Dragan, A.D.; Pivtoraiko, M.; Klingensmith, M.; Dellin, C.M.; Bagnell, J.A.; Srinivasa, S.S. CHOMP: Covariant Hamiltonian optimization for motion planning. Int. J. Robot. Res. 2013, 32, 1164–1193. [Google Scholar] [CrossRef]
- Chang, J.J.; Wu, T.I.; Wu, W.L.; Su, F.C. Kinematical measure for spastic reaching in children with cerebral palsy. Clin. Biomech. 2005, 20, 381–388. [Google Scholar] [CrossRef]
- Lacquaniti, F.; Terzuolo, C.; Viviani, P. The law relating the kinematic and figural aspects of drawing movements. Acta Psychol. 1983, 54, 115–130. [Google Scholar] [CrossRef]
- Wann, J.; Nimmo-Smith, I.; Wing, A.M. Relation between velocity and curvature in movement: Equivalence and divergence between a power law and a minimum-jerk model. J. Exp. Psychol. Hum. Percept. Perform. 1988, 14, 622–637. [Google Scholar] [CrossRef]
- Hugues, O.; Weistroffer, V.; Paljic, A.; Fuchs, P.; Karim, A.A.; Gaudin, T.; Buendia, A. Determining the Important Subjective Criteria in the Perception of Human-Like Robot Movements Using Virtual Reality. Int. J. Hum. Robot. 2016, 13, 1550033. [Google Scholar] [CrossRef]
- Xu, H.; Ding, X. A synergic method for anthropomorphic dual-arm robots to plan bimanual transport tasks. In Proceedings of the 2017 IEEE International Conference on Robotics and Biomimetics (ROBIO), Macau, China, 5–8 December 2017; pp. 1020–1025. [Google Scholar]
- Lewis, F.L.; Vrabie, D.L.; Syrmos, V.L. Optimal Control; John Wiley and Sons, Inc.: Hoboken, NJ, USA, 2012. [Google Scholar]
- Zacharias, F.; Schlette, C.; Schmidt, F.; Borst, C.; Rossmann, J.; Hirzinger, G. Making planned paths look more human-like in humanoid robot manipulation planning. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 1192–1198. [Google Scholar]
- Li, B.; Zheng, Y.F.; Hemami, H.; Che, D. Human-like robotic handwriting and drawing. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 4942–4947. [Google Scholar]
- Morsella, E.; Bargh, J.A.; Gollwitzer, P.M. Oxford Handbook of Human Action; Oxford University Press: Oxford, UK, 2009. [Google Scholar]
- Yang, W.; Bae, J.H.; Oh, Y.; Chong, N.Y.; You, B.J. CPG based self-adapting multi-DOF robotic arm control. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 4236–4243. [Google Scholar]
- Rosado, J.; Silva, F.; Santos, V.; Lu, Z. Reproduction of human arm movements using Kinect-based motion capture data. In Proceedings of the 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO), Shenzhen, China, 12–14 December 2013; pp. 885–890. [Google Scholar]
- Gulletta, G.; Araújo, S.M.; Costa e Silva, E.; Costa, M.F.; Erlhagen, W.; Bicho, E. Nonlinear optimization for human-like synchronous movements of a dual arm-hand robotic system. In Proceedings of the International Conference of Numerical Analysis and Applied Mathermatics, Rhodes, Greece, 22–28 September 2015; p. 140007. [Google Scholar]
- Shin, S.Y.; Kim, C. Human-Like Motion Generation and Control for Humanoid’s Dual Arm Object Manipulation. IEEE Trans. Ind. Electron. 2015, 62, 2265–2276. [Google Scholar] [CrossRef]
- Suarez, R.; Rosell, J.; Garcia, N. Using synergies in dual-arm manipulation tasks. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 5655–5661. [Google Scholar]
- Garcia, N.; Roseli, J.; Suarez, R. Modeling human-likeness in approaching motions of dual-arm autonomous robots. In Proceedings of the 2018 IEEE International Conference on Simulation, Modeling, and Programming for Autonomous Robots (SIMPAR), Brisbane, Australia, 16–19 May 2018; pp. 43–48. [Google Scholar]
- Rosell, J.; Suarez, R.; Perez, A.; Rosales, C. Including virtual constraints in motion planning for anthropomorphic hands. In Proceedings of the 2011 IEEE International Symposium on Assembly and Manufacturing (ISAM), Tampere, Finland, 25–27 May 2011; pp. 1–6. [Google Scholar]
- Kavraki, L.E.; Švestka, P.; Latombe, J.C.; Overmars, M.H. Probabilistic roadmaps for path planning in high-dimensional configuration spaces. IEEE Trans. Robot. Autom. 1996, 12, 566–580. [Google Scholar] [CrossRef]
- Xie, B.; Zhao, J.; Liu, Y. Human-like motion planning for robotic arm system. In Proceedings of the 2011 15th International Conference on Advanced Robotics (ICAR), Tallinn, Estonia, 20–23 June 2011; pp. 88–93. [Google Scholar]
- Liu, W.; Chen, D.; Steil, J. Analytical Inverse Kinematics Solver for Anthropomorphic 7-DOF Redundant Manipulators with Human-Like Configuration Constraints. J. Intell. Robot. Syst. 2017, 86, 63–79. [Google Scholar] [CrossRef]
- Schwartz, A.B. Movement: How the Brain Communicates with the World. Cell 2016, 164, 1122–1135. [Google Scholar] [CrossRef] [PubMed]
- Burdet, E.; Franklin, D.W.; Milner, T.E. Human Robotics; MIT Press: Cambridge, MA, USA, 2013. [Google Scholar]
- Uno, Y.; Kawato, M.; Suzuki, R. Formation and Control of Optimal Trajectory in Human Multijoint Arm Movement-Minimum Torque-Change Model. Cybern. Biol. 1989, 61, 89–101. [Google Scholar] [CrossRef]
- Engelbrecht, S.E. Minimum Principles in Motor Control. J. Math. Psychol. 2001, 45, 497–542. [Google Scholar] [CrossRef]
- Todorov, E. Optimality principles in sensorimotor control. Nat. Neurosci. 2004, 7, 907–915. [Google Scholar] [CrossRef]
- Ivaldi, S.; Sigaud, O.; Berret, B.; Nori, F. From Humans to Humanoids: The Optimal Control Framework. Paladyn J. Behav. Robot. 2012, 3, 75–91. [Google Scholar] [CrossRef]
- Albrecht, S.; Ramirez-Amaro, K.; Ruiz-Ugalde, F.; Weikersdorfer, D.; Leibold, M.; Ulbrich, M.; Beetz, M. Imitating human reaching motions using physically inspired optimization principles. In Proceedings of the 2011 11th IEEE-RAS International Conference on Humanoid Robots, Bled, Slovenia, 26–28 October 2011; IEEE: Bled, Slovenia, 2011; pp. 602–607. [Google Scholar]
- Silva, E.C.; Costa, M.F.; Bicho, E.; Erlhagen, W. Human-Like Movement of an Anthropomorphic Robot: Problem Revisited. AIP Conf. Proc. 2011, 1389, 779–782. [Google Scholar]
- Silva, E.C.; Costa, M.F.; Araújo, J.P.; Machado, D.; Louro, L.; Erlhagen, W.; Bicho, E. Towards human-like bimanual movements in anthropomorphic robots: A nonlinear optimization. Appl. Math. Inf. Sci. 2015, 9, 619–629. [Google Scholar]
- Fourer, R.; Gay, D.M.; Kernighan, B.W. AMPL: A Mathematical Programming Language; Technical Report; AT & T Bell Laboratories: Murray Hill, NJ, USA, 1989. [Google Scholar]
- Wachter, A.; Biegler, L.T. On the implementation of an interior-point filter line-search algorithm for large-scale nonlinear programming. Math. Program. 2005, 106, 25–57. [Google Scholar] [CrossRef]
- Nocedal, J.; Wright, S.J. Numerical Optimization; Springer: Berlin/Heidelberg, Germany, 1999. [Google Scholar]
- Burdet, E.; Milner, T.E. Quantization of human motions and learning of accurate movements. Biol. Cybern. 1998, 78, 307–318. [Google Scholar] [CrossRef] [PubMed]
- Park, G.R.; Kim, C. Constructing of optimal database structure by imitation learning based on evolutionary algorithm. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 2698–2703. [Google Scholar]
- Shukla, A.; Billard, A. Coupled dynamical system based arm-hand grasping model for learning fast adaptation strategies. Robot. Auton. Syst. 2012, 60, 424–440. [Google Scholar] [CrossRef]
- Billard, A.; Calinon, S.; Dillmann, R.; Schaal, S. Robot Programming by Demonstration. In Springer Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2008; Volume 48, pp. 1371–1394. [Google Scholar]
- Bishop, C.M. Pattern Recognition and Machine Learning (Information Science and Statistics); Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Su, H.; Qi, W.; Yang, C.; Aliverti, A.; Ferrigno, G.; De Momi, E. Deep Neural Network Approach in Human-Like Redundancy Optimization for Anthropomorphic Manipulators. IEEE Access 2019, 7, 124207–124216. [Google Scholar] [CrossRef]
- Floreano, D.; Ijspeert, A.J.; Schaal, S. Robotics and Neuroscience. Curr. Biol. 2014, 24, R910–R920. [Google Scholar] [CrossRef]
- Bae, J.H.; Yang, W.; Kim, D.; Oh, Y.; You, B.J.; Oh, S.R. Robotic arm control inspired by human muscle tension effect under the gravity. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 1404–1411. [Google Scholar]
- Stefanovic, F.; Galiana, H.L. An adaptive spinal-like controller: Tunable biomimetic behavior for a robotic limb. BioMed. Eng. Online 2014, 13, 151. [Google Scholar] [CrossRef]
- Togo, S.; Kagawa, T.; Uno, Y. Uncontrolled Manifold Reference Feedback Control of Multi-Joint Robot Arms. Front. Comput. Neurosci. 2016, 10, 1–18. [Google Scholar] [CrossRef]
- Scholz, J.P.; Schöner, G. The uncontrolled manifold concept: Identifying control variables for a functional task. Exp. Brain Res. 1999, 126, 289–306. [Google Scholar] [CrossRef]
- Todorov, E.; Jordan, M.I. Optimal feedback control as a theory of motor coordination. Nat. Neurosci. 2002, 5, 1226–1235. [Google Scholar] [CrossRef]
- Schaal, S. Learning Robot Control. In The handbook of Brain Theory and Neural Networks, 2nd ed.; MIT Press: Cambridge, UK, 2002; pp. 983–987. [Google Scholar]
- Kawato, M.; Furukawa, K.; Suzuki, R. A hierarchical neural-network model for control and learning of voluntary movement. Biol. Cybern. 1987, 57, 169–185. [Google Scholar] [CrossRef]
- Kawato, M. Internal models for motor control and trajectory planning. Curr. Opin. Neurobiol. 1999, 9, 718–727. [Google Scholar] [CrossRef]
- Milner, T.E. A model for the generation of movements requiring endpoint precision. Neuroscience 1992, 49, 487–496. [Google Scholar] [CrossRef]
- Kupferberg, A.; Huber, M.; Helfer, B.; Lenz, C.; Knoll, A.; Glasauer, S. Moving Just Like You: Motor Interference Depends on Similar Motility of Agent and Observer. PLoS ONE 2012, 7, e39637. [Google Scholar] [CrossRef] [PubMed]
- Dragan, A.D.; Lee, K.C.T.; Srinivasa, S.S. Legibility and predictability of robot motion. In Proceedings of the 2013 8th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Tokyo, Japan, 3–6 March 2013; pp. 301–308. [Google Scholar]
- Bisio, A.; Sciutti, A.; Nori, F.; Metta, G.; Fadiga, L.; Sandini, G.; Pozzo, T. Motor Contagion during Human-Human and Human-Robot Interaction. PLoS ONE 2014, 9, e106172. [Google Scholar] [CrossRef] [PubMed]
- Chang, J.J.; Yang, Y.S.; Guo, L.Y.; Wu, W.L.; Su, F.C. Differences in reaching performance between normal adults and patients post stroke a kinematic analysis. J. Med. Biol. Eng. 2008, 28, 53–58. [Google Scholar]
- Vaughan, J.; Rosenbaum, D.A.; Meulenbroek, R.G.J. Modeling Reaching and Manipulating in 2- and 3-D Workspaces: The Posture-Based Model. In Proceedings of the International Conference on Development and Learning (ICDL), Bloomington, IN, USA, 3 June 2006; Volume 1, pp. 3–8. [Google Scholar]
- Van Andel, C.J.; Wolterbeek, N.; Doorenbosch, C.A.M.; Veeger, D.H.E.J.; Harlaar, J. Complete 3D kinematics of upper extremity functional tasks. Gait Posture 2008, 27, 120–127. [Google Scholar] [CrossRef]
- Gates, D.H.; Walters, L.S.; Cowley, J.; Wilken, J.M.; Resnik, L. Range of Motion Requirements for Upper-Limb Activities of Daily Living. Am. J. Occup. Ther. 2016, 70, 7001350010. [Google Scholar] [CrossRef]
- Major, K.A.; Major, Z.Z.; Carbone, G.; Pîslă, A.; Vaida, C.; Gherman, B.; Pîslă, D.L. Ranges of motion as basis for robot-assisted poststroke rehabilitation. Hum. Vet. Med. 2016, 8, 200–204. [Google Scholar]
- Jurkojć, J.; Wodarski, P.; Michnik, R.; Nowakowska, K.; Bieniek, A.; Gzik, M. The upper limb motion deviation index: A new comprehensive index of upper limb motion pathology. Acta Bioeng. Biomech. 2017, 19, 175–185. [Google Scholar]
- Caggiano, V.; De Santis, A.; Siciliano, B.; Chianese, A. A biomimetic approach to mobility distribution for a human-like redundant arm. In Proceedings of the First IEEE/RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics, Pisa, Italy, 20–22 February 2006; Volume 2006, pp. 393–398. [Google Scholar]
- Yang, W.; Bae, J.H.; Oh, Y.; Chong, N.Y.; You, B.J. Biologically inspired control for robotic arm using neural oscillator network. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St Louis, MO, USA, 10–15 October 2009; pp. 135–141. [Google Scholar]
- Artemiadis, P.K.; Katsiaris, P.T.; Kyriakopoulos, K.J. A biomimetic approach to inverse kinematics for a redundant robot arm. Auton. Robot. 2010, 29, 293–308. [Google Scholar] [CrossRef]
- Pattacini, U.; Nori, F.; Natale, L.; Metta, G.; Sandini, G. An experimental evaluation of a novel minimum-jerk cartesian controller for humanoid robots. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 1668–1674. [Google Scholar]
- Bhattacharjee, T.; Oh, Y.; Bae, J.H.; Oh, S.R. Control design for human-like reaching movements using redundancy in robot arm-trunk systems. Int. J. Control Autom. Syst. 2011, 9, 1173–1186. [Google Scholar] [CrossRef]
- Strauss, S.; Heinke, D. A Robotics-Based Approach to Modeling of Choice Reaching Experiments on Visual Attention. Front. Psychol. 2012, 3, 1–11. [Google Scholar] [CrossRef]
- Wang, Y.; Artemiadis, P. Closed-Form Inverse Kinematic Solution for Anthropomorphic Motion in Redundant Robot Arms. Ph.D. Thesis, Arizona State University, Tempe, AZ, USA, 2013. [Google Scholar]
- Xia, J.; Jiang, Z.; Liu, H.; Cai, H. Analytical inverse kinematic computation for anthropomorphic manipulator based on human-like motion optimization and maximum reachable region optimization. In Proceedings of the 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014), Bali, Indonesia, 5–10 December 2014; pp. 2292–2297. [Google Scholar]
- Liu, Z.; Hu, F.; Luo, D.; Wu, X. Learning arm movements of target reaching for humanoid robot. In Proceedings of the 2015 IEEE International Conference on Information and Automation, Lijiang, China, 8–10 August 2015; pp. 707–713. [Google Scholar]
- Xie, B.; Zhao, J. Handing Over Objects to Human in a Friendly and Comfortable Manner. Int. J. Hum. Robot. 2015, 12, 1550012-20. [Google Scholar] [CrossRef]
- Chen, W.; Xiong, C.; Yue, S. On Configuration Trajectory Formation in Spatiotemporal Profile for Reproducing Human Hand Reaching Movement. IEEE Trans. Cybern. 2016, 46, 804–816. [Google Scholar] [CrossRef]
- Zhao, J.; Wei, Y. A Novel Algorithm of Human-Like Motion Planning for Robotic Arms. Int. J. Humanoid Robot. 2017, 14, 1650023. [Google Scholar] [CrossRef]
- Alibeigi, M.; Rabiee, S.; Ahmadabadi, M.N. Inverse Kinematics Based Human Mimicking System using Skeletal Tracking Technology. J. Intell. Robot. Syst. 2017, 85, 27–45. [Google Scholar] [CrossRef]
- Su, H.; Enayati, N.; Vantadori, L.; Spinoglio, A.; Ferrigno, G.; De Momi, E. Online human-like redundancy optimization for tele-operated anthropomorphic manipulators. Int. J. Adv. Robot. Syst. 2018, 15, 172988141881469. [Google Scholar] [CrossRef]
- Stilman, M. Global Manipulation Planing in Robot Joint Space with Task Constraints. IEEE Trans. Robot. 2010, 26, 576–584. [Google Scholar] [CrossRef]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gulletta, G.; Erlhagen, W.; Bicho, E. Human-Like Arm Motion Generation: A Review. Robotics 2020, 9, 102. https://doi.org/10.3390/robotics9040102
Gulletta G, Erlhagen W, Bicho E. Human-Like Arm Motion Generation: A Review. Robotics. 2020; 9(4):102. https://doi.org/10.3390/robotics9040102
Chicago/Turabian StyleGulletta, Gianpaolo, Wolfram Erlhagen, and Estela Bicho. 2020. "Human-Like Arm Motion Generation: A Review" Robotics 9, no. 4: 102. https://doi.org/10.3390/robotics9040102
APA StyleGulletta, G., Erlhagen, W., & Bicho, E. (2020). Human-Like Arm Motion Generation: A Review. Robotics, 9(4), 102. https://doi.org/10.3390/robotics9040102