Possible Life Saver: A Review on Human Fall Detection Technology


Abstract
1. Introduction
2. Methods
3. Technologies and Products Summary
3.1. Systems Based on Wearable Devices
3.2. Systems Based on Ambient Sensor Systems
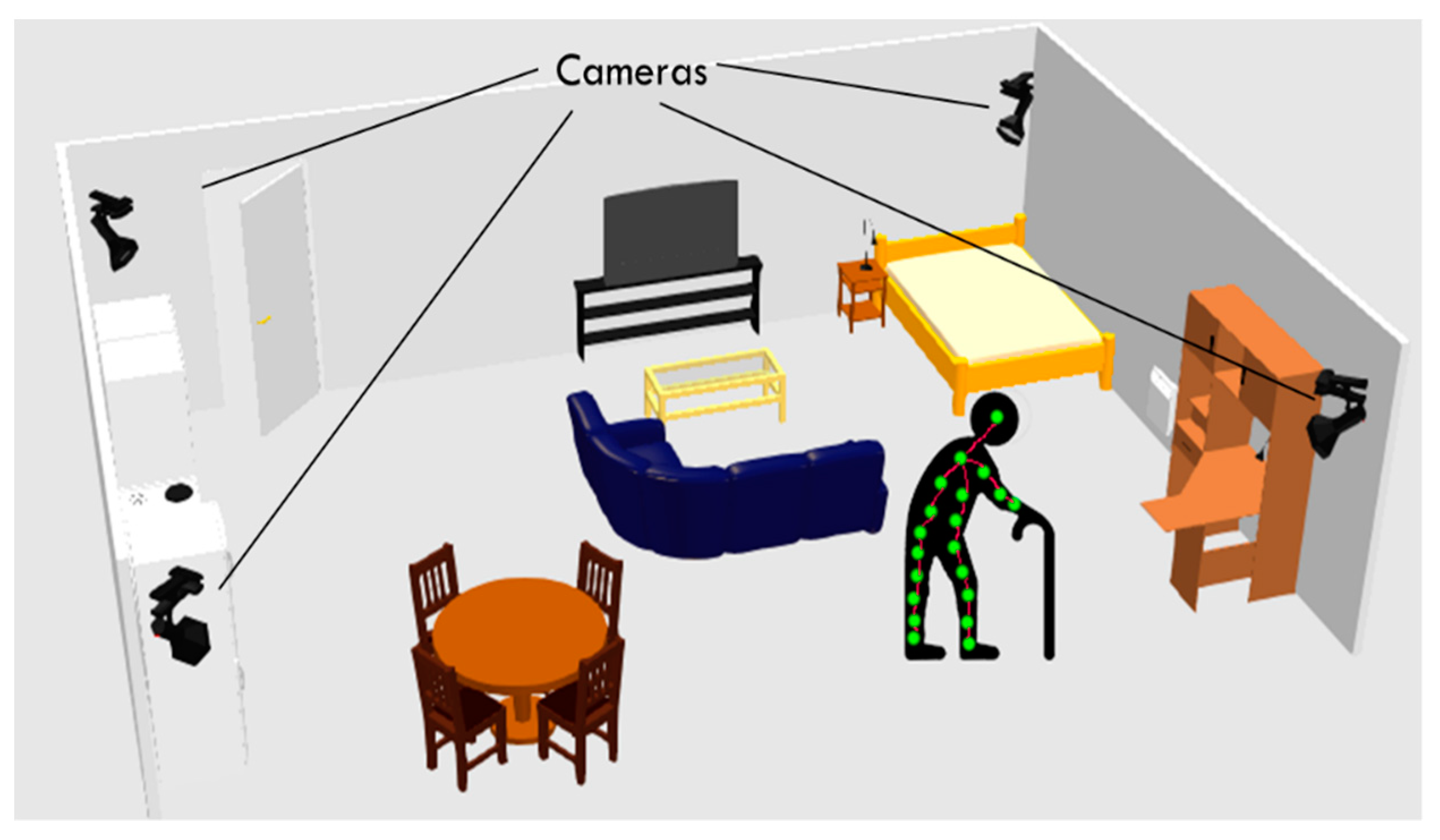
3.3. Systems Based on Image Processing
3.4. Combined Systems Incorporating Two or More Technologies
4. Discussion
4.1. Issues
4.2. Trends
4.3. Challenges
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Falls. Available online: https://www.who.int/news-room/fact-sheets/detail/falls (accessed on 14 December 2019).
- Center for Disease Control and Prevention. Falls Reported by State. 2019. Available online: https://www.cdc.gov/homeandrecreationalsafety/falls/fallcost/falls-by-state.html (accessed on 10 December 2019).
- Center for Disease Control and Prevention. Deaths from Falls. 2019. Available online: https://www.cdc.gov/homeandrecreationalsafety/falls/fallcost/deaths-from-falls.html (accessed on 10 December 2019).
- Center for Disease Control and Prevention. Falls Data. 2019. Available online: https://www.cdc.gov/homeandrecreationalsafety/falls/fallcost.html (accessed on 14 December 2019).
- Center for Disease Control and Prevention. Important Facts about Falls. 2019. Available online: https://www.cdc.gov/homeandrecreationalsafety/falls/adultfalls.html (accessed on 14 December 2019).
- Hausdorff, J.M.; Edelberg, H.K.; Mitchell, S.L.; Goldberger, A.L.; Wei, J.Y. Increased gait unsteadiness in community-dwelling elderly fallers. Arch. Phys. Med. Rehabil. 1997, 78, 278–283. [Google Scholar] [CrossRef]
- Pannurat, N.; Thiemjarus, S.; Nantajeewarawat, E. Automatic fall monitoring: A review. Sensors 2014, 14, 12900–12936. [Google Scholar] [CrossRef] [PubMed]
- Luque, R.; Casilari, E.; Morón, M.J.; Redondo, G. Comparison and characterization of android-based fall detection systems. Sensors 2014, 14, 18543–18574. [Google Scholar] [CrossRef] [PubMed]
- Ren, L.; Peng, Y. Research of fall detection and fall prevention technologies: A systematic review. IEEE Access 2019, 7, 77702–77722. [Google Scholar] [CrossRef]
- Khan, S.S.; Hoey, J. Review of fall detection techniques: A data availability perspective. Med Eng. Phys. 2017, 39, 12–22. [Google Scholar] [CrossRef] [PubMed]
- Igual, R.; Medrano, C.; Plaza, I. Challenges, issues and trends in fall detection systems. Biomed. Eng. online 2013, 12, 66. [Google Scholar] [CrossRef]
- Chaudhuri, S.; Thompson, H.; Demiris, G. Fall detection devices and their use with older adults: A systematic review. J. Geriatr. Phys. Ther. 2014, 37, 178–196. [Google Scholar] [CrossRef]
- Bagala, F.; Becker, C.; Cappello, A.; Chiari, L.; Aminian, K.; Hausdorff, J.M.; Klenk, J. Evaluation of accelerometer-based fall detection algorithms on real-world falls. PLoS ONE 2012, 7, e37062. [Google Scholar] [CrossRef]
- Jo, B.; Lee, Y.; Kim, J.; Jung, S.; Yang, D.; Lee, J.; Hong, J. Design of Wearable Airbag with Injury Reducing System. In Proceedings of the 2007 3rd Information and Communication Technologies for Ageing Well and e-Health (ICT4AgeingWell), Porto, Portugal, 28–29 April 2017; pp. 188–191. [Google Scholar]
- Tideiksaar, R. Falling in Old Age: Prevention and Management; Springer: Berlin/Heidelberg, Germany, 1996. [Google Scholar]
- Shi, G.; Chan, C.S.; Li, W.J.; Leung, K.S.; Zou, Y.; Jin, Y. Mobile human airbag system for fall protection using MEMS sensors and embedded SVM classifier. IEEE Sens. J. 2009, 9, 495–503. [Google Scholar] [CrossRef]
- Fukaya, K. Fall detection sensor for fall protection airbag. In Proceedings of the 41st SICE Annual Conference. SICE 2002, Osaka, Japan, 5–7 August 2002; Volume 1, pp. 419–420. [Google Scholar]
- Wearable Technology. Available online: https://en.wikipedia.org/wiki/wearable_technology, (accessed on 14 December 2019).
- Dai, J.; Bai, X.; Yang, Z.; Shen, Z.; Xuan, D. Mobile phone-based pervasive fall detection. Pers. Ubiquitous Comput. 2010, 14, 633–643. [Google Scholar] [CrossRef]
- Jian, H.; Chen, H. A portable fall detection and alerting system based on k-NN algorithm and remote medicine. China Commun. 2015, 12, 23–31. [Google Scholar] [CrossRef]
- Sim, S.Y.; Jeon, H.S.; Chung, G.S.; Kim, S.K.; Kwon, S.J.; Lee, W.K.; Park, K.S. Fall detection algorithm for the elderly using acceleration sensors on the shoes. In Proceedings of the 2011 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Boston, NV, USA, 30 August–3 September 2011; pp. 4935–4938. [Google Scholar]
- Lai, C.F.; Chang, S.Y.; Chao, H.C.; Huang, Y.M. Detection of cognitive injured body region using multiple triaxial accelerometers for elderly falling. IEEE Sens. J. 2010, 11, 763–770. [Google Scholar] [CrossRef]
- Menz, H.B.; Lord, S.R.; Fitzpatrick, R.C. Acceleration patterns of the head and pelvis when walking are associated with risk of falling in community-dwelling older people. J. Gerontol. Ser. A Biol. Sci. Med Sci. 2003, 58, M446–M452. [Google Scholar] [CrossRef] [PubMed]
- Bourke, A.K.; Lyons, G.M. A threshold-based fall-detection algorithm using a bi-axial gyroscope sensor. Med Eng. Phys. 2008, 30, 84–90. [Google Scholar] [CrossRef] [PubMed]
- Najafi, B.; Loew, F.; Blanc, Y.; Robert, P. Falling risk evaluation in elderly using miniature gyroscope. In Proceedings of the 1st Annual International IEEE-EMBS Special Topic Conference on Microtechnologies in Medicine and Biology, Proceedings (Cat. No. 00EX451), Lyon, France, 12–14 October 2000; pp. 557–561. [Google Scholar]
- Torres, G.G.; Henriques, R.V.B.; Pereira, C.E.; Müller, I. An EnOcean wearable device with fall detection algorithm integrated with a smart home system. IFAC-PapersOnLine 2018, 51, 9–14. [Google Scholar] [CrossRef]
- Tamura, T.; Yoshimura, T.; Sekine, M.; Uchida, M.; Tanaka, O. A wearable airbag to prevent fall injuries. IEEE Trans. Inf. Technol. Biomed. 2009, 13, 910–914. [Google Scholar] [CrossRef]
- Kurniawan, A.; Hermawan, A.R.; Purnama, I.K.E. A wearable device for fall detection elderly people using tri dimensional accelerometer. In Proceedings of the 2016 International Seminar on Intelligent Technology and Its Applications (ISITIA), Mataram, Indonesia, 28–30 July 2016; pp. 671–674. [Google Scholar]
- Rakhman, A.Z.; Nugroho, L.E. Fall detection system using accelerometer and gyroscope based on smartphone. In Proceedings of the 2014 The 1st International Conference on Information Technology, Computer, and Electrical Engineering, Semarang, Indonesia, 7–8 November 2014; pp. 99–104. [Google Scholar]
- Apple Watch. Helping Your Patients Identify Early Warning Signs. Available online: https://www.apple.com/healthcare/apple-watch/ (accessed on 14 December 2019).
- Sense4care Angel4. Fall Detection. Personal and Unique Device. Available online: https://www.sense4care.com/fall-detection/ (accessed on 14 December 2019).
- Hussain, F.; Hussain, F.; Ehatisham-ul-Haq, M.; Azam, M.A. Activity-aware fall detection and recognition based on wearable sensors. IEEE Sens. J. 2019, 19, 4528–4536. [Google Scholar] [CrossRef]
- Ramachandran, A.; Adarsh, R.; Pahwa, P.; Anupama, K.R. Machine learning-based fall detection in geriatric healthcare systems. In Proceedings of the 2018 IEEE International Conference on Advanced Networks and Telecommunications Systems (ANTS), Indore, India, 16–19 December 2018; pp. 1–6. [Google Scholar]
- Yu, S.; Chen, H.; Brown, R.A. Hidden Markov model-based fall detection with motion sensor orientation calibration: A case for real-life home monitoring. IEEE J. Biomed. Health Inform. 2017, 22, 1847–1853. [Google Scholar] [CrossRef]
- Nguyen, T.T.; Cho, M.C.; Lee, T.S. Automatic fall detection using wearable biomedical signal measurement terminal. In Proceedings of the 2009 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Minneapolis, MN, USA, 2–6 September 2009; pp. 5203–5206. [Google Scholar]
- Sabatini, A.M.; Ligorio, G.; Mannini, A.; Genovese, V.; Pinna, L. Prior-to-and post-impact fall detection using inertial and barometric altimeter measurements. IEEE Trans. Neural Syst. Rehabil. Eng. 2015, 24, 774–783. [Google Scholar] [CrossRef] [PubMed]
- Otanasap, N. Pre-impact fall detection based on wearable device using dynamic threshold model. In Proceedings of the 2016 17th International Conference on Parallel and Distributed Computing, Applications and Technologies (PDCAT), Guangzhou, China, 16–18 December 2016; pp. 362–365. [Google Scholar]
- Saadeh, W.; Butt, S.A.; Altaf, M.A.B. A patient-specific single sensor IoT-based wearable fall prediction and detection system. IEEE Trans. Neural Syst. Rehabil. Eng. 2019, 27, 995–1003. [Google Scholar] [CrossRef]
- Rathi, N.; Kakani, M.; Rizkalla, M.; El-Sharkawy, M. Portable and Low Power Efficient Pre-Fall Detection Methodology. In Proceedings of the 2018 IEEE 61st International Midwest Symposium on Circuits and Systems (MWSCAS), Windsor, ON, Canada, 5–8 August 2018; pp. 230–233. [Google Scholar]
- Sadreazami, H.; Bolic, M.; Rajan, S. TL-FALL: Contactless Indoor Fall Detection Using Transfer Learning from a Pretrained Mode. In Proceedings of the 2019 IEEE International Symposium on Medical Measurements and Applications (MeMeA), İstanbul, Turkey, 26–28 June 2019; pp. 1–5. [Google Scholar]
- Chang, Y.T.; Shih, T.K. Human fall detection based on event pattern matching with ultrasonic array sensors. In Proceedings of the 2017 10th International Conference on Ubi-media Computing and Workshops (Ubi-Media), Pattaya, Thailand, 1–4 August 2017; pp. 1–4. [Google Scholar]
- Ding, C.; Zou, Y.; Sun, L.; Hong, H.; Zhu, X.; Li, C. Fall detection with multi-domain features by a portable FMCW radar. In Proceedings of the 2019 IEEE MTT-S International Wireless Symposium (IWS), Guangzhou, China, 19–22 May 2019; pp. 1–3. [Google Scholar]
- Kinect. Available online: https://en.wikipedia.org/wiki/Kinect (accessed on 9 July 2020).
- Barabas, J.; Bednar, T.; Vychlopen, M. Kinect-Based Platform for Movement Monitoring and Fall-Detection of Elderly People. In Proceedings of the 2019 12th International Conference on Measurement, Smolenice Castle, Slovakia, 27–29 May 2019; pp. 199–202. [Google Scholar]
- Stone, E.E.; Skubic, M. Fall detection in homes of older adults using the Microsoft Kinect. IEEE J. Biomed. Health Inform. 2014, 19, 290–301. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Ho, K.C.; Popescu, M. A microphone array system for automatic fall detection. IEEE Trans. Biomed. Eng. 2012, 59, 1291–1301. [Google Scholar]
- Huang, Y.; Chen, W.; Chen, H.; Wang, L.; Wu, K. G-Fall: Device-free and Training-free Fall Detection with Geophones. In Proceedings of the 2019 16th Annual IEEE International Conference on Sensing, Communication, and Networking (SECON), Boston, MA, USA, 10–13 June 2019; pp. 1–9. [Google Scholar]
- Cao, W.; Liu, X.; Li, F. Robust device-free fall detection using fine-grained Wi-Fi signatures. In Proceedings of the 2017 IEEE 2nd Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 25–26 March 2017; pp. 1404–1408. [Google Scholar]
- Tzeng, H.W.; Chen, M.Y.; Chen, J.Y. Design of fall detection system with floor pressure and infrared image. In Proceedings of the 2010 International Conference on System Science and Engineering, Taipei, Taiwan, 1–3 July 2010; pp. 131–135. [Google Scholar]
- Erol, B.; Amin, M. Effects of range spread and aspect angle on radar fall detection. In Proceedings of the 2016 IEEE Sensor Array and Multichannel Signal Processing Workshop (SAM), Rio de Janeiro, Brazil, 10–13 July 2016; pp. 1–5. [Google Scholar]
- Bian, Z.P.; Hou, J.; Chau, L.P.; Magnenat-Thalmann, N. Fall detection based on body part tracking using a depth camera. IEEE J. Biomed. Health Inform. 2014 19, 430–439. [CrossRef]
- Waheed, S.A.; Khader, P.S.A. A novel approach for smart and cost effective IoT based elderly fall detection system using Pi camera. In Proceedings of the 2017 IEEE International Conference on Computational Intelligence and Computing Research (ICCIC), Tamil Nadu, India, 14–16 December 2017; pp. 1–4. [Google Scholar]
- Nguyen, V.D.; Le, M.T.; Do, A.D.; Duong, H.H.; Thai, T.D.; Tran, D.H. An efficient camera-based surveillance for fall detection of elderly people. In Proceedings of the 2014 9th IEEE Conference on Industrial Electronics and Applications, Hangzhou, China, 9–11 June 2014; pp. 994–997. [Google Scholar]
- Jariyavajee, C.; Faphatanchai, A.; Saeheng, W.; Tuntithawatchaikul, C.; Sirinaovakul, B.; Polvichai, J. An Improvement in Fall Detection System by Voting Strategy. In Proceedings of the 2019 34th International Technical Conference on Circuits/Systems, Computers and Communications (ITC-CSCC), Jeju Shinhwa World, Korea, 23–26 June 2019; pp. 1–4. [Google Scholar]
- Rougier, C.; Meunier, J.; St-Arnaud, A.; Rousseau, J. Fall detection from human shape and motion history using video surveillance. In Proceedings of the 21st International Conference on Advanced Information Networking and Applications Workshops (AINAW’07), Niagara Falls, ON, Canada, 21–23 May 2007; Volume 2, pp. 875–880. [Google Scholar]
- Agrawal, S.C.; Tripathi, R.K.; Jalal, A.S. Human-fall detection from an indoor video surveillance. In Proceedings of the 2017 8th International Conference on Computing, Communication and Networking Technologies (ICCCNT), IIT Delhi, India, 3–5 July 2017; pp. 1–5. [Google Scholar]
- Foroughi, H.; Rezvanian, A.; Paziraee, A. Robust fall detection using human shape and multi-class support vector machine. In Proceedings of the 2008 Sixth Indian Conference on Computer Vision, Graphics Image Processing, Bhubaneswar, India, 16–19 December 2008; pp. 413–420. [Google Scholar]
- Anderson, D.; Luke, R.H.; Keller, J.M.; Skubic, M.; Rantz, M.; Aud, M. Linguistic summarization of video for fall detection using voxel person and fuzzy logic. Comput. Vis. Image Underst. 2009, 113, 80–89. [Google Scholar] [CrossRef] [PubMed]
- De Miguel, K.; Brunete, A.; Hernando, M.; Gambao, E. Home camera-based fall detection system for the elderly. Sensors 2017, 17, 2864. [Google Scholar] [CrossRef]
- Sase, P.S.; Bhandari, S.H. Human fall detection using depth videos. In Proceedings of the 2018 5th International Conference on Signal Processing and Integrated Networks (SPIN), Noida, India, 22–23 February 2018; pp. 546–549. [Google Scholar]
- Poonsri, A.; Chiracharit, W. Improvement of fall detection using consecutive-frame voting. In Proceedings of the 2018 International Workshop on Advanced Image Technology (IWAIT), Chiang Mai, Thailand, 7–10 January 2018; pp. 1–4. [Google Scholar]
- Su, M.C.; Liao, J.W.; Wang, P.C.; Wang, C.H. A smart ward with a fall detection system. In Proceedings of the 2017 IEEE International Conference on Environment and Electrical Engineering and 2017 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Milan, Italy, 6–9 June 2017; pp. 1–4. [Google Scholar]
- Chen, J.; Kwong, K.; Chang, D.; Luk, J.; Bajcsy, R. Wearable sensors for reliable fall detection. In Proceedings of the 2005 IEEE Engineering in Medicine and Biology 27th Annual Conference, Shanghai, China, 17–18 January 2006; pp. 3551–3554. [Google Scholar]
- Vecchio, A.; Cola, G. Fall detection using ultra-wideband positioning. In Proceedings of the 2016 IEEE SENSORS, Orlando, FL, USA, 30 October–2 November 2016; pp. 1–3. [Google Scholar]
- Della Toffola, L.; Patel, S.; Chen, B.R.; Ozsecen, Y.M.; Puiatti, A.; Bonato, P. Development of a platform to combine sensor networks and home robots to improve fall detection in the home environment. In Proceedings of the 2011 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Boston, MA, USA, 30 August–3 September 2011; pp. 5331–5334. [Google Scholar]
- Liu, L.; Popescu, M.; Skubic, M.; Rantz, M. An automatic fall detection framework using data fusion of Doppler radar and motion sensor network. In Proceedings of the 2014 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Chicago, IL, USA, 26–30 August 2014; pp. 5940–5943. [Google Scholar]
- Tsinganos, P.; Skodras, A. On the comparison of wearable sensor data fusion to a single sensor machine learning technique in fall detection. Sensors 2018, 18, 592. [Google Scholar] [CrossRef]
- Sposaro, F.; Tyson, G. iFall: An Android application for fall monitoring and response. In Proceedings of the 2009 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Minneapolis/St. Paul, MN, USA, 2–6 September 2009; pp. 6119–6122. [Google Scholar]
- Fahmi, P.A.; Viet, V.; Deok-Jai, C. Semi-supervised fall detection algorithm using fall indicators in smartphone. In Proceedings of the 6th International Conference on Ubiquitous Information Management and Communication, Kuala Lumpur, Malaysia, 20–22 February 2012; pp. 1–9. [Google Scholar]
- Yin, J.; Yang, Q.; Pan, J.J. Sensor-based abnormal human-activity detection. IEEE Trans. Knowl. Data Eng. 2008, 20, 1082–1090. [Google Scholar] [CrossRef]
- Xiang, T.; Gong, S. Video behavior profiling and abnormality detection without manual labelling. In Proceedings of the Tenth IEEE International Conference on Computer Vision (ICCV’05) Volume 1, Beijing, China, 17–21 October 2005; Volume 2, pp. 1238–1245. [Google Scholar]
- Farseeing (FAll Repository for the Design of Smart and Self-Adaptive Environments Prolonging Independent Living) Project. Available online: http://farseeingresearch.eu/ (accessed on 27 May 2020).
- Electroencephalography. Available online: https://en.wikipedia.org/wiki/electroencephalography (accessed on 24 January 2020).
- The ERP Technique. Available online: https://www.dartmouth.edu/~readingbrains/researchfiles/erptechnique.html (accessed on 24 January 2020).
- 10–20 System. Available online: https://en.wikipedia.org/wiki/10-20_system_(eeg) (accessed on 27 January 2020).
- Woodman, G.F. A brief introduction to the use of event-related potentials in studies of perception and attention. Atten. Percept. Psychophys. 2010, 72, 2031–2046. [Google Scholar] [CrossRef]
- Event-Related Potential. Available online: https://en.wikipedia.org/wiki/event-related_potential (accessed on 5 July 2020).
- Adkin, A.L.; Quant, S.; Maki, B.E.; McIlroy, W.E. Cortical responses associated with predictable and unpredictable compensatory balance reactions. Exp. Brain Res. 2006, 172, 85. [Google Scholar] [CrossRef] [PubMed]
- Casson, A.J.; Smith, S.; Duncan, J.S.; Rodriguez-Villegas, E. Wearable EEG: What is it, why is it needed and what does it entail? In Proceedings of the 2008 30th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Vancouver, BC, Canada, 20–24 August 2008; pp. 5867–5870. [Google Scholar]
- Looney, D.; Kidmose, P.; Park, C.; Ungstrup, M.; Rank, M.L.; Rosenkranz, K.; Mandic, D.P. The in-the-ear recording concept: User-centered and wearable brain monitoring. IEEE Pulse 2012, 3, 32–42. [Google Scholar] [CrossRef] [PubMed]
- Mikkelsen, K.B.; Kappel, S.L.; Mandic, D.P.; Kidmose, P. EEG recorded from the ear: Characterizing the ear-EEG method. Front. Neurosci. 2015, 9, 438. [Google Scholar] [CrossRef] [PubMed]
- Zibrandtsen, I.C.; Kidmose, P.; Christensen, C.B.; Kjaer, T.W. Ear-EEG detects ictal and interictal abnormalities in focal and generalized epilepsy–A comparison with scalp EEG monitoring. Clin. Neurophysiol. 2017, 128, 2454–2461. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
| Article | Proposed Approach | Measure of Performance | Challenges |
|---|---|---|---|
| [21] | A tri-axial acceleration sensor was attached on each shoe. With a microcontroller, Bluetooth module was also used to transmit data in real time. | Sensitivity = 81.5% | The sensor is attached on the shoe which is so close to the ground that less acceleration would occur than the rest of the body. |
| [22] | Joint sensing of several three-axle acceleration sensors was applied aiming to provide sufficient data to make judgment on fall accident and differentiate the behavioral event and the falling accident. | Accuracy = 92.92% | When the subjects walk slow, no obvious periodical acceleration may be used for judgment, leading to failure of identification. |
| [23] | This technique uses accelerometers placed on the pelvis and head to detect body accelerations when subjects are walking on a specially designed unpredictably irregular walkway. | N/A | This system only estimates the fall risk of the subject rather than making a decision on falling. |
| [24] | The ability to discriminate between falls and ADL was achieved using a bi-axial gyroscope sensor mounted on the trunk, measuring pitch and roll angular velocities, and a threshold-based algorithm. The gyroscope signals were acquired from simulated falls performed by healthy young subjects and ADLs performed by elderly persons in their own homes. | Accuracy = 100% Sensitivity = 100% Specificity = 100% | The ADLs chosen are only sitting downs and standing ups which do not generate large orientation disturbance in gyroscope as other fall-like ADLs, such as bending over tying a shoe. |
| [25] | A piezoelectric gyroscope was attached with a belt in front of the sternum. A standard motion analysis system was also used as reference. Subjects performed different activities involving postural transitions and dynamic activities with use of different type of chairs with and without use of armrest. | Sensitivity = 99% | Only the tilt angle between the vertical axis and the subject’s anterior wall of thorax was analyzed. The angular velocity is also important as it reflects how fast the angle is changed. |
| [26] | Three-axis accelerometer and gyroscope are attached to the chest of the patient. X, Y, and Z axes values are observed which are then compared with the accelerometer and gyro and a decision is made. | Sensitivity = 96% Specificity = 100% | Cannot detect fall or misclassify when the person uses stairs or short corridors. |
| [27] | Uses a triaxial accelerometer and a triaxial gyroscope. A fall is considered when the acceleration is less than ±3 m/s2 and the angular velocity exceeds 0.52 rad/s. | Accuracy = 93% | Works on sensors which is prone to failure of detection or false trigger. |
| [28] | Triaxial accelerometer is used to measure the X, Y, and Z values and sent to a microcontroller where the measured values are compared with a threshold value for fall detection. | Success Rate: Forward fall = 75% Backward fall = 95% | Not great accuracy and success rate as it uses only one sensor to detect fall. |
| [29] | Fall detection is performed by comparing the difference of the maximum and minimum values in the sample and the last with a specific threshold. Also, the angle value is considered to measure the posture. | Accuracy = 93.33% | There are some falling situations which cannot be detected. |
| [30] | Fall detection works on the device’s accelerometer and gyroscope. Wrist trajectory and impact acceleration were observed to detect fall incidents. | N/A | It is a watch worn on people’s wrist where lot of unnecessary movements occur, which is prone to false negatives or false positives. |
| [31] | Fall detection is estimated by the combination of the device’s triaxial accelerometer and a special algorithm. Device is connected with smartphones for emergency services. | N/A | Works on only one sensor which fails to provide accuracy for different types of falling events. |
| [32] | Angular rotation is considered using a gyroscope along with acceleration to minimize false positives. The proposed work considers the fall detection as a binary classification problem and tested with KNN and random forest classifier. | Accuracy: kNN classifier = 99.80% RF classifier = 96.82% | Few falling activities, such as forward fall, while walking caused by a trip are hard to detect. |
| [33] | NNN, naïve Bayes, SVM, ANN, and decision tree algorithms with and without including the risk factorization were implemented and their results were compared for fall detection. | Several accuracy values were shown for all the algorithms implemented. | Utilize too many algorithms without indicating solution when given different results. |
| [34] | The proposed work includes a new representation for acceleration signals in HMMs to avoid feature engineering and the development of a sensor orientation calibration algorithm to resolve sensor misplacement issues in real-world scenarios. HMM classifiers are trained to detect falls based on acceleration signal data collected from motion sensors. | Experiment: Positive Prediction = 98.1% Sensitivity = 99.2% Real World: Positive Prediction = 78.6% Sensitivity = 100 | The data in this study is a snapshot of one event, not many events from one subject over time. It might be promising to include subject data over time and with changing health status to improve the system. |
| [35] | A tri-axial accelerometer and a CDMA standalone modem were used to detect and manage fall events. | No error was recognized in laboratory environment | Works with accelerometers only. Size of device is too bulky to be ergonomic. |
| [36] | This system is based on the integration of an inertial measurement unit with a barometric altimeter (BIMU). Using these sensors, the vertical velocity and height are measured, and the root sum of squares is calculated and compared with the threshold to decide the fall event. | Sensitivity = 80% Specificity = 100% | Height is measured which is a bad factor for humans with varying heights. |
| [37] | Velocity and acceleration of the person is tracked by the MetaTracker fixed at the chest position. The dynamic threshold can scale up and down depending on previous scene change that is suitable for separating fall from ADLs. | Sensitivity= 99.48% Specificity= 95.31% Accuracy = 97.40% | Chest-based wearable devices require better ergonomic design |
| [38] | Single triaxial accelerometer attached to the patient’s thigh. Two modes of operation: fast mode for fall prediction (FMFP): uses non-linear SVM classifier; slow mode for fall detection (SMFD): utilizes three-cascaded one second long sliding frames classification architecture. | FMFP: Sensitivity = 97.8% Specificity = 99.1% SMFD: Sensitivity = 98.6% Specificity = 99.3% | Works on only one sensor which fails to provide accuracy for different types of falling events. |
| [39] | A belt-like wearable sensor based on pre-fall detection system, which uses linear and angular velocity information from motion sensor to classify human fall. | Accuracy = 96.63% Sensitivity = 100% Specificity = 95.45% | The low-power-cost portable design limits the system with using threshold value based algorithm only. |
| Article | Proposed Approach | Measure of Performance | Challenges |
|---|---|---|---|
| [40] | An ultra-wideband radar is used to monitor human daily activities and identify the occurrence of falls. | Accuracy = 95.64% Precision = 96.12% Sensitivity = 96.73% | Fine tuning with a greater number of convolutional layers will result in overfitting. |
| [41] | An algorithm for fall detection based on event pattern matching with ultrasonic array sensors signal. | Accuracy = 98% | False alarm towards people with pets and walking sticks. |
| [42] | Dynamic range-Doppler trajectory (DRDT) method based on a frequency-modulated continuous-wave (FMCW) radar system is proposed. Multi-domain features including temporal changes of range, Doppler, radar cross-section, and dispersion are extracted from echo signals for a subspace kNN classifier. | Average classification accuracy = 95.5% | The subject should be in line of sight which is a major drawback as the presence of walls and furniture at users’ living environment. |
| [44] | A platform programmed in C# for movement monitoring and fall detection of persons based on data acquired from a Microsoft Kinect v2 sensor. | True Positive Rate = 82% False Alarm Rate = 18% | High false alarm rate that requires human review on the RGB image of event. |
| [45] | Real-time fall detection system based on the Kinect sensor. The system defines a 3D bounding box of human posture with the measurement of width, height, and depth of the subject. | Accuracy = 98.6% | Requires tons of computing resources. |
| [46] | Acoustic fall detection system with acoustic signals recorded by arrays of microphones, sampled at 20 KHz. | Specificity = 97% Sensitivity = 100% | False alarms due to large piece item dropped on the ground considered as fall. |
| [47] | A device-free fall detection system based on geophone. Falling mode is decomposed and characterized with time-dependent floor vibration features. Hidden Markov model is also utilized to recognize the fall event precisely and achieve training free recognition. | Precision = 95.74% False Alarm Rate = 5.30% | The floor vibration profile induced by many other objects falling from a certain height is similar to human fall. |
| [48] | A robust and unobtrusive fall detection system using off-the-shelf Wi-Fi devices, which gather fluctuant wireless signals as indicators of human actions. | True Positive Rate = 92% False Alarm Rate = 6% Average Accuracy= 91% | Accuracy decreases due to raw CSI data from bad antennas. |
| [49] | An ambient system combined with floor pressure sensor and infrared. It adjusts the detection sensitivity on a case-by-case basis to reduce unnecessary alarms. | Specificity = 96.7% Sensitivity = 100% | Infrared sensor cannot tell the monitored subject from other people or pets. Floor pressure sensor has trouble detecting slow falls. |
| [50] | An indoor motion monitoring system with Kinect simulator and range Doppler radar. It successfully distinguishing falls from sitting motions, which leads to reduced false alarms. | Accuracy = 85–96% | Presence of scatters caused by interior walls. Similar Doppler signatures of pets jumping off tables and chairs to those of a human fall. The orthogonality between the motion direction and the line of sight. |
| Article | Proposed Approach | Measure of Performance | Challenges |
|---|---|---|---|
| [51] | Depth camera measures the relationship between the body and the environment. A randomized decision tree (RDT) algorithm is proposed for the key joint extraction. Then SVM classifier is employed to determine whether a fall motion occurs. | Sensitivity = 95.3% Specificity = 100% Accuracy = 97.6% Error = 2.4% | Does not detect fall event if one of the joints of the body is hidden by an obstacle. |
| [52] | Foreground segmentation, Motion History image, calculation of C-motion and pace, calculation of standard deviation of C-motion, calculation of orientation of ellipse (locate person’s foreground) are performed for fall detection using Pi Camera. Finally, if the value of orientation standard deviation of ellipse has high changing rate, it detects as a fall event | N/A | Proposed approach just replaces expensive CCTV camera based fall detection. If some motion is observed 5 seconds after a fall, then it will consider that the fall did not occur. |
| [53] | Posture-based events captured with a camera resolution of 640 × 480 pixels and at 30fps. The fall detection includes video acquisition, background subtraction, object detection and rule-based classification. | Accuracy = 92.5% | Only works if the person lies on the ground for a while which can cause serious injury. |
| [54] | Fall detection systems with voting strategy from three depth cameras that provide the depth image to the fall detections. | Accuracy = 96.48% Precision = 90.20% Fall Detection Rate: 96.7% | Voting strategy only depends on simple voting but not weighted voting. |
| [55] | An RGB camera system detects fall by analyzing C-motion coefficient, which measures human motion with the help of motion history images which shows the pace of human body. | Sensitivity = 88% Specificity = 99.7% | C-motion works on the velocity of movement. It would return high value calculations even the subject is just running. |
| [56] | Background subtraction, contour based human template matching, Height–width ratio computation and computation of distance between top and mid center of rectangle covering human are performed | Detection acc. = 95.2% False detection= 3.33% | Does not detect fall when the human is very close or parallel to the camera. |
| [57] | An image processing based system that mainly tracks the head of subject. It applies SVM to detect eclipse shape, position of the head, vertical and horizontal projection histogram. | Sensitivity = 90.27% | Head’s movement is less intensive comparing to body’s especially during slow fall period. |
| [58] | 3D representation of humans using multiple cameras. Two levels of fuzzy logic: 1. Calibrations between cameras to determine posture of subject. 2. Decision making on identifying subject’s activity. | Sensitivity = 100% Specificity = 93.75% | Demands expensive costs of computing. Accuracy also relies on huge database. |
| [59] | The proposed approach includes image acquisition, foreground segmentation, Kalman filter optical flow occlusion detection, and a kNN classifier. Occlusion helps the system to detect falls if the person is hidden by an object after falling. | Sensitivity = 96% Specificity = 97.6% Precision = 96% Accuracy = 96.9% | Occlusion, light, and ambient conditions affect the fall detection significantly. |
| [60] | A support system based on depth videos for old age people living alone in their homes. A region of interest (ROI) is detected by subtracting background from extracted frames. A threshold is proposed to separate the ROI of fall and non-fall. | UR Dataset: Fall Accuracy = 100% Non-fall Accuracy = 82.5% | Proposed method is not applicable to person lying on floor. It also spends most of the computing energy on specifying the posture of the. subject. A threshold is then proposed as a result instead of machine learning. |
| [61] | An improvement of fall detection using consecutive-frame voting to improve previous work accuracy. The method consists five stages: (1) human detection, (2) low-level feature extraction, (3) human centroid tracking (4) event classification, and (5) consecutive frame voting. | Accuracy = 91.38% Sensitivity = 97.92% Specificity = 60.00% | Requires very large amount of computing. Also, the results are only from several cameras located on certain fixed positions. Tests with different viewpoints are needed. |
| [62] | Six different features extracted from an image frame are used as inputs to a neural network | Accuracy = 98.15% Kappa Value = 0.96 | Never tested with real human falls. All results are simulated. |
| Article | Proposed Approach | Measure of Performance | Challenges |
|---|---|---|---|
| [63] | Using a small device worn on the waist and a network of fixed motes of home environment, the occurrence of a fall is detected with the location of the victim. Low cost and power 3D accelerometers are used to detect the fall while RF signal is used to locate the person. | N/A | Accuracy decreases due to raw CSI data from bad antennas, barriers, and long distance. |
| [64] | Wearable device with multiple nodes in it is installed in near-head position of the patient. Then, the posture of the nodes is tracked by an ultrawide band radar. | N/A | Calibration for standing, sitting, and lying on ground postures is needed. |
| [65] | A fall detection system based on a combination sensor networks and home robots which comprises of body worn sensors and ambient sensors distributed in the environment. | N/A | Packet transmission delay is relatively large. Consumption of power also impacts battery life. |
| [66] | A fall detection system with improved framework by fusing the Doppler radar sensor result with a motion sensor network. | Accuracy = 98.7% | The experiment only relies on a portion of data from a large dataset. Further testing is needed. |
| Sys. Type | Price | Set-Up | Robustness | Target No. | Privacy Concern | Obtrusive | Battery Issue |
|---|---|---|---|---|---|---|---|
| Wearable | Cheap | Easy | Low | Single | None | Yes | Yes |
| Ambient | Low Parts + High Labor | Major Installation | Moderate | Single | Low | No | No |
| Vision | Expensive | Easy | High | Multiple | High | No | No |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Ramamoorthy, V.; Gal, U.; Guez, A. Possible Life Saver: A Review on Human Fall Detection Technology. Robotics 2020, 9, 55. https://doi.org/10.3390/robotics9030055
Wang Z, Ramamoorthy V, Gal U, Guez A. Possible Life Saver: A Review on Human Fall Detection Technology. Robotics. 2020; 9(3):55. https://doi.org/10.3390/robotics9030055
Chicago/Turabian StyleWang, Zhuo, Vignesh Ramamoorthy, Udi Gal, and Allon Guez. 2020. "Possible Life Saver: A Review on Human Fall Detection Technology" Robotics 9, no. 3: 55. https://doi.org/10.3390/robotics9030055
APA StyleWang, Z., Ramamoorthy, V., Gal, U., & Guez, A. (2020). Possible Life Saver: A Review on Human Fall Detection Technology. Robotics, 9(3), 55. https://doi.org/10.3390/robotics9030055