Abstract
In this paper, the inequivalence of the direct-contact mechanisms and their equivalent four-bar linkages in jerk analysis is discussed. Kinematic analyses for three classical types of direct-contact mechanisms consisting of: (a) higher pairs with permanently invariant curvature centers, (b) higher pairs with suddenly changed curvature, and (c) higher pairs with continuously varying curvature are performed, respectively, through their representative case studies. The analyzed results show that the equivalent four-bar linkage cannot give a correct value of jerk for most situations in the three case studies. Subsequently, the concept of “equivalent six-bar linkage” for direct-contact mechanisms is proposed in order to discuss the infeasibility of the equivalent four-bar linkage for jerk analysis. It is found that the suddenly changed or continuously varying curvature of the higher pairs is not considered in sudden or continuous link-length variations of the equivalent four-bar linkage, which further leads to inconsistency between the angular accelerations of the coupler and the contact normal, and finally results in the infeasibility of the equivalent four-bar linkage for jerk analysis of most direct-contact mechanisms. It is also found that the concept of equivalent six-bar linkage could be applied to evaluate more higher-order time derivatives for most direct-contact mechanisms. The presented case studies and discussion can give demonstrations for understanding the inequivalence of the direct-contact mechanisms and their equivalent four-bar linkages in the aspect of jerk analysis.
1. Introduction
Direct-contact mechanisms, such as gear and cam mechanisms, are mechanisms with higher pairs. The simplest direct-contact mechanism consists of a frame, a driving link, and a driven link, in which the driving and driven links are in contact with each other to transmit motion and force. Kinematic analysis for such a three-link direct-contact mechanism can sometimes be replaced by its equivalent four-bar linkage in order to calculate the velocity and acceleration at a particular instant [1,2,3,4,5]. Although there might be an infinite number of equivalent four-bar linkages for a three-link direct-contact mechanism, the one with its coupler connecting the centers of curvature of the driving and driven links is referred to as the “representative equivalent four-bar linkage” [2]. Alaci et al. [6] applied the concept of equivalent linkage to derive the analytical expressions for the relative motion between the members of a higher pair in a planar three-link mechanism; the characteristics for the relative velocity and relative acceleration, depending on the local geometry of the pair of profiles in contact with each other can be analytically obtained by using their presented method. Some applications in the aspect of reverse engineering may also be carried out based on the theoretical development. That is, for an existing direct-contact mechanism with an unknown input-output relation, when the geometric information for the members of the existing higher pair (such as measured coordinates or curved-fitted equations of their actual profiles, and also some measured link-length related dimensions) is known, the contact points for the existing higher pair as well as their corresponding radii of curvature can be accordingly obtained. Subsequently, the kinematic analysis for the existing direct-contact mechanism can be indirectly performed through the concept of equivalent linkage without solving cumbersome equations for the higher-pair contact analysis [7,8,9]. Furthermore, when the physical properties for the members of the existing higher pair (such as their masses, centers of masses, and mass moments of inertia) are known, dynamic force analysis for the existing direct-contact mechanism can also be performed, for which the indirectly obtained accelerations for the existing higher pair can be used for calculating their inertia forces and moments. Thus, the shaking forces and moments [5] in the existing direct-contact mechanism can be evaluated.
The concept of equivalent linkage has also been adopted in some practical applications. Wu et al. [10] propose a simplified graphical method for determining the radii of curvature of disk cam profiles, which is based on the construction of the equivalent four-bar linkage for a disk cam mechanism through Freudenstein’s third theorem. Chang and Wu [11,12,13] analyze the mechanical errors in disk cam mechanisms and in planar cam-modulated linkages by transforming each cam-and-follower mechanism (or sub-mechanism) into its equivalent four-bar linkage (or sub-linkage) in order to derive the analytical equations for the positioning errors of the driven link(s). In addition, Chang and Wu [14] and Chang et al. [15] introduce some specially designed measuring fixtures for inspecting the profile errors of conjugate disk cams, respectively, whose principles are based on the conjugate condition analysis via the equivalent linkage of an assembled conjugate cam mechanism consisting of a pair of inspected conjugate disk cams and a measuring fixture. In these practical applications, the concept of equivalent linkage is quite helpful in developing systematic approaches.
McPhate and Daniel [1] provided a proof to show that the equivalent four-bar linkage can give correct values of velocity and acceleration. However, the equivalent four-bar linkage cannot give a correct value of the time rate of change of acceleration, called the jerk or pulse. Such a situation is described in most textbooks for kinematics of machinery, but without giving proofs or demonstrations. Chang and Yang [16] discussed the inequivalence of the direct-contact mechanisms and their equivalent four-bar linkages in the aspect of jerk analysis through two case studies. Their results show that the equivalent four-bar linkage indeed cannot give a correct value of jerk for most situations in the two case studies, but the major cause of the infeasibility is still not discussed in detail.
This paper aims at extending Chang and Yang’s work [16] to present a more complete study on the inequivalence of the direct-contact mechanisms and their equivalent four-bar linkages in the aspect of jerk analysis. The direct-contact mechanisms consisting of higher pairs are classified into three classical types: (a) higher pairs with permanently invariant curvature centers, (b) higher pairs with suddenly changed curvature, and (c) higher pairs with continuously varying curvature; and their representative case studies are presented. Subsequently, the concept of “equivalent six-bar linkage” for direct-contact mechanisms is proposed in order to discuss the infeasibility of the equivalent four-bar linkage for jerk analysis in detail.
2. Equivalent Four-Bar Linkages of Three-Link Direct-Contact Mechanisms
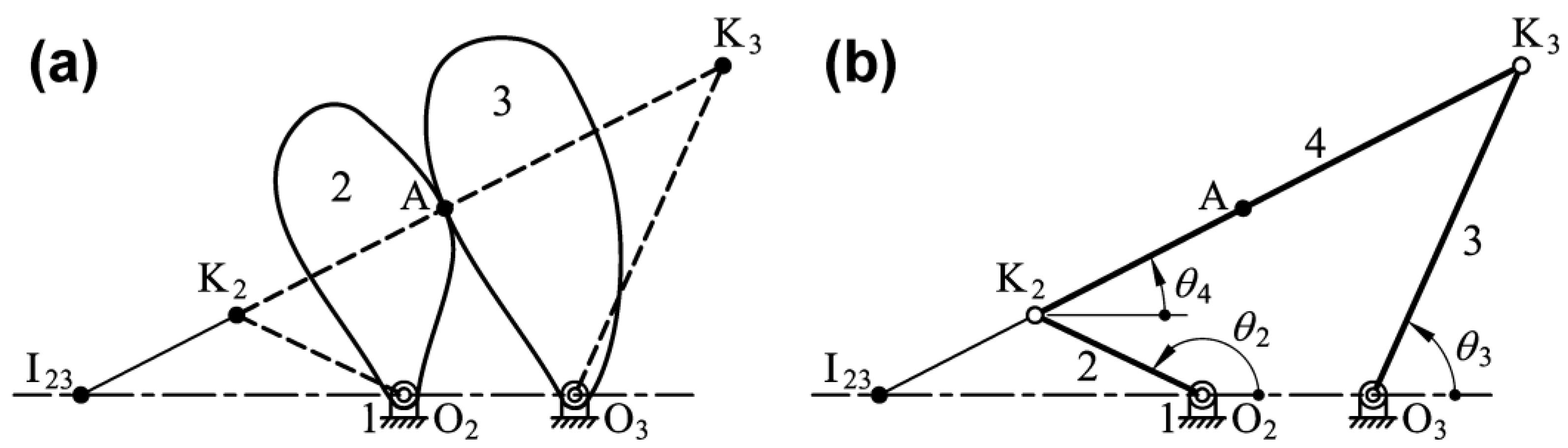
Figure 1a shows a typical three-link direct-contact mechanism, consisting of a frame (link 1), a driving link (link 2), and a driven link (link 3). The driving and driven links are pivoted to the frame on points O2 and O3, respectively. Points K2 and K3 are the centers of curvature of the driving and driven links in contact at point A, respectively. The common normal at the contact point A must always pass through points K2, K3, and the instant velocity center I23. The equivalent linkage of this direct-contact mechanism is the four-bar linkage O2K2K3O3 shown in Figure 1b, in which the coupler (link 4) of the linkage connects the centers of curvature of the driving link, K2, and of the driven link, K3. The instantaneous velocity and acceleration of links O2K2 and O3K3 (i.e., links 2 and 3 shown in Figure 1b) are identical to those of the driving and driven links, respectively.

Figure 1.
Illustration of a three-link direct-contact mechanism and its equivalent four-bar linkage; (a) the direct-contact mechanism and (b) the equivalent four-bar linkage.
For the four-bar linkage shown in Figure 1b, its link lengths are r1 = O2O3, r2 = O2K2, r3 = O3K3, and r4 = K2K3, and the angular positions of links, θ2, θ3, and θ4, are measured counterclockwise from line O2O3. By using the vector loop method to solve the velocity equations simultaneously, the analytical expressions of the angular velocities of link 3 (ω3) and link 4 (ω4) can be derived as [16,17]
in which, ω2 is the known angular velocity of link 2. Subsequently, by using the vector loop method to solve the acceleration equations simultaneously, the analytical expressions of the angular accelerations of link 3 (α3) and link 4 (α4) can be derived as [16,17]
in which, α2 is the known angular acceleration of link 2. Furthermore, by using the vector loop method to solve the jerk equations simultaneously, the analytical expressions of the angular jerks of link 3 (ζ3) and link 4 (ζ4) can be derived as [16]
in which, ζ2 is the known angular jerk of link 2. The derived analytical expressions are used to evaluate the kinematic characteristics of equivalent four-bar linkages obtained from direct-contact mechanisms presented in the following Sections.
3. Kinematic Analysis for Direct-Contact Mechanisms Consisting of Higher Pairs with Permanently Invariant Curvature Centers: Planar Gear Mechanisms with Involute Spur Gears
For a direct-contact mechanism consisting of higher pairs with permanently invariant curvature centers, its equivalent four-bar linkage can also maintain a permanently invariant configuration at all instants. The planar gear mechanism with involute spur gears is a representative one of this type of direct-contact mechanisms. Thus, kinematic analysis for such a planar gear mechanism is presented in this Section.
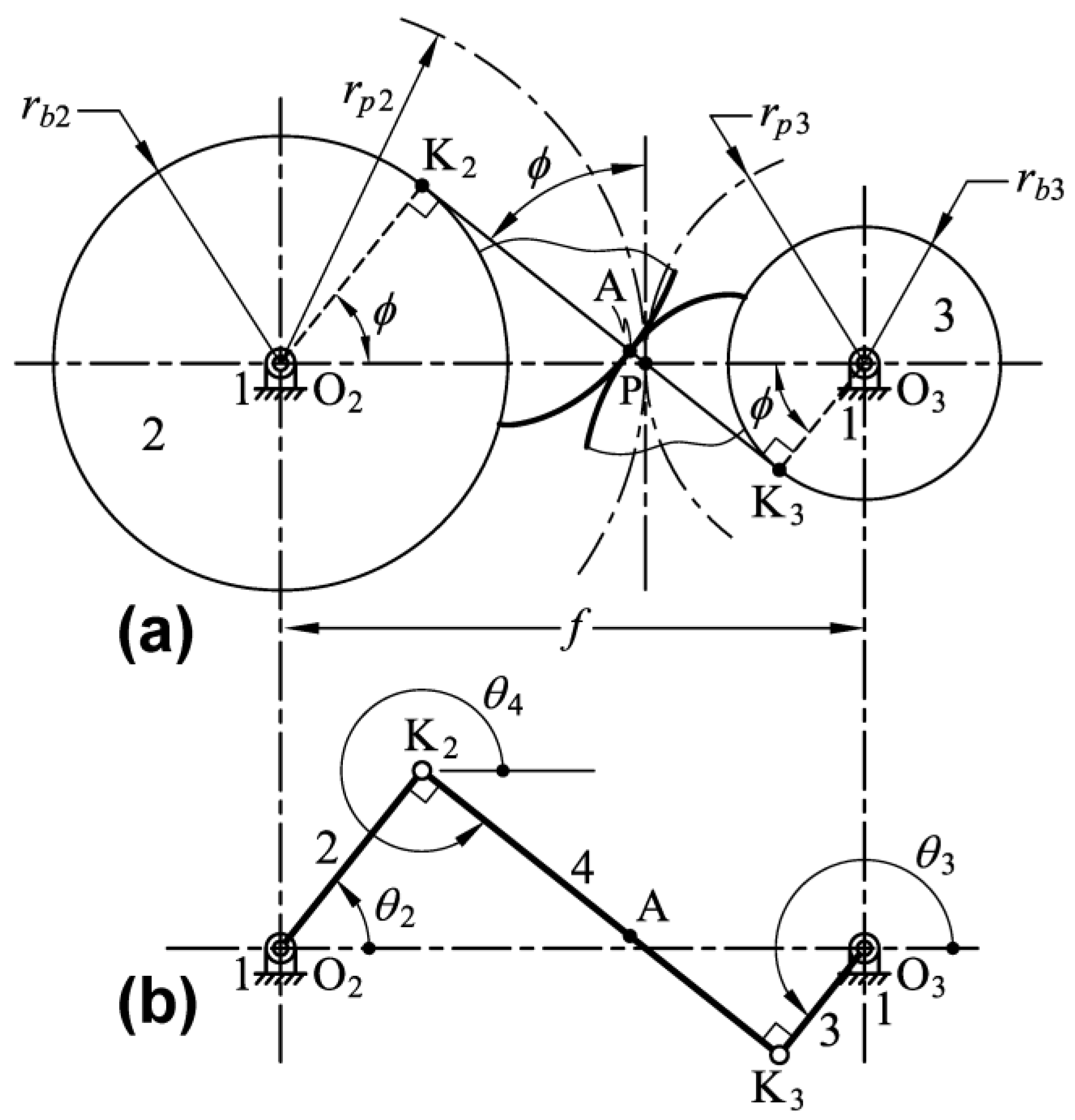
Figure 2a illustrates a planar gear mechanism, consisting of a frame (link 1), a driving gear (link 2), and a driven gear (link 3). The driving and driven gears are pivoted to the frame on points O2 and O3, respectively, while the center distance is f. The driving and driven gears are both typically involute spur gears that have involute tooth profiles generated from their base circles with radii of rb2 and rb3, respectively. Thus, a constant angular velocity ratio between the two mating gears can be determined through the radii of their pitch circles rp2 and rp3. Points K2 and K3 are the centers of curvature of a pair of involute tooth profiles in contact at point A, respectively. The common normal at the contact point A (i.e. the line of action) must always pass through points K2, K3 and also the pitch point P. It is known that the line of action must always be the interior common tangent of the base circles of the two mating gears, while points K2 and K3 must always be coincident to the two points of tangency regardless of any positional change of the contact point A. Additionally, lines O2K2 and O3K3 are always parallel to each other, and the subtending acute angle between each of them and line O2O3 is always equal to the pressure angle ϕ of the gear mechanism. As a result, the equivalent linkage of this planar gear mechanism is the four-bar linkage O2K2K3O3 shown in Figure 2b, in which the coupler (link 4) of the linkage connects the centers of curvature of a pair of involute tooth profiles. The configuration of the equivalent four-bar linkage O2K2K3O3 shown in Figure 2b is a permanently invariant crossed quadrilateral at all instants, according to the geometric characteristics of involute tooth profiles.

Figure 2.
Illustration of a planar gear mechanism with a pair of involute spur gears and its equivalent four-bar linkage; (a) the planar gear mechanism and (b) the equivalent four-bar linkage.
For the four-bar linkage that is shown in Figure 2b, its link lengths are r1 = O2O3 = f, r2 = O2K2 = rb2 = rp2cosϕ, r3 = O3K3 = rb3 = rp3cosϕ, and r4 = K2K3 = f sinϕ, and the angular positions of links, θ2, θ3, and θ4, are measured counterclockwise from line O2O3. Since the equivalent four-bar linkage is a permanently invariant crossed quadrilateral at all instants, thus the angular positions are invariantly θ2 = ϕ, θ3 = ϕ + 180°, and θ4 = ϕ + 270°. By substituting the values of θ2, θ3, and θ4 into Equations (1) and (2), the angular velocities of links 3 and 4 of the equivalent linkage can be expressed as
Equation (8) shows that the angular velocity of the coupler (link 4) is zero, which agrees with the kinematic property of the stationary common normal. Afterwards, by substituting the values of θ2, θ3, and θ4, and also ω4 = 0 into Equations (3) and (4), the angular accelerations of links 3 and 4 of the equivalent linkage can be expressed as
Equation (10) shows that the angular acceleration of the coupler (link 4) is always greater than zero, which does not agree with the kinematic property of the stationary common normal. Furthermore, by substituting the values of θ2, θ3, and θ4 and also ω4 = 0 into Equations (5) and (6), the angular jerks of links 3 and 4 of the equivalent linkage can be expressed as
Equation (12) shows that the angular jerk of the coupler (link 4) is zero if and only if α2 = α3 = 0 when ω2 ≠ 0 and ω3 ≠ 0, otherwise it does not agree with the kinematic property of the stationary common normal.
When considering that the driving gear rotates at a constant angular velocity ω2, its angular acceleration and jerk are α2 = 0 and ζ2 = 0, respectively. The driven gear will also rotate at a constant angular velocity ω3, and its angular acceleration and jerk should be α3 = 0 and ζ3 = 0, respectively. From Equation (7), it is found that
Equation (13) undoubtedly agrees with the fundamental law of gearing [17], which is, the angular velocity ratio between links 2 and 3 of the equivalent linkage is equal to that between the mating driving and driven gears. Hence, the equivalent four-bar linkage of the planar gear mechanism can give a correct value of angular velocity. Subsequently, by substituting α2 = 0 into Equation (9), the angular acceleration of link 3 of the equivalent linkage is
It shows that the angular acceleration of link 3 of the equivalent linkage is zero, which is equal to that of the driven gear. Hence, the equivalent four-bar linkage of the planar gear mechanism can provide a correct value of angular acceleration. Furthermore, by substituting α2 = 0, α3 = 0, and ζ2 = 0 into Equations (11) and (12), the angular jerks of links 3 and 4 of the equivalent linkage are
From Equations (7) and (15), the angular jerk of link 3 of the equivalent linkage can be further expressed as
From Equation (17), it can be found that
It shows that the angular jerk of link 3 of the equivalent linkage is zero if and only if r2 = r3. In other words, the angular jerk of link 3 of the equivalent linkage is equal to that of the driven gear if, and only if, rp2 = rp3. Hence, only when the angular velocity ratio between the two mating gears (ω3/ω2) is exactly negative one (−1), the equivalent four-bar linkage of the planar gear mechanism can give correct values of angular velocity, acceleration, and jerk. Otherwise, the equivalent four-bar linkage of the planar gear mechanism can only give correct values of angular velocity and acceleration.
In this case study, it is found that the equivalent four-bar linkage of a planar gear mechanism with a pair of involute spur gears is not able to give a correct value of jerk, unless the angular velocity ratio between the two mating gears is exactly negative one (−1).
4. Kinematic Analysis for Direct-Contact Mechanisms Consisting of Higher Pairs with Suddenly Changed Curvature: Disk Cam Mechanisms with a Circular-Arc Cam and an Oscillating Roller Follower
For a direct-contact mechanism consisting of higher pairs with suddenly changed curvature (i.e., discontinuous curvature), two equivalent four-bar linkages may simultaneously exist at a certain instant. The disk cam mechanism with a circular-arc cam and an oscillating roller follower is a representative one of this type of direct-contact mechanisms. Thus, kinematic analysis for such a disk cam mechanism is presented in this Section.
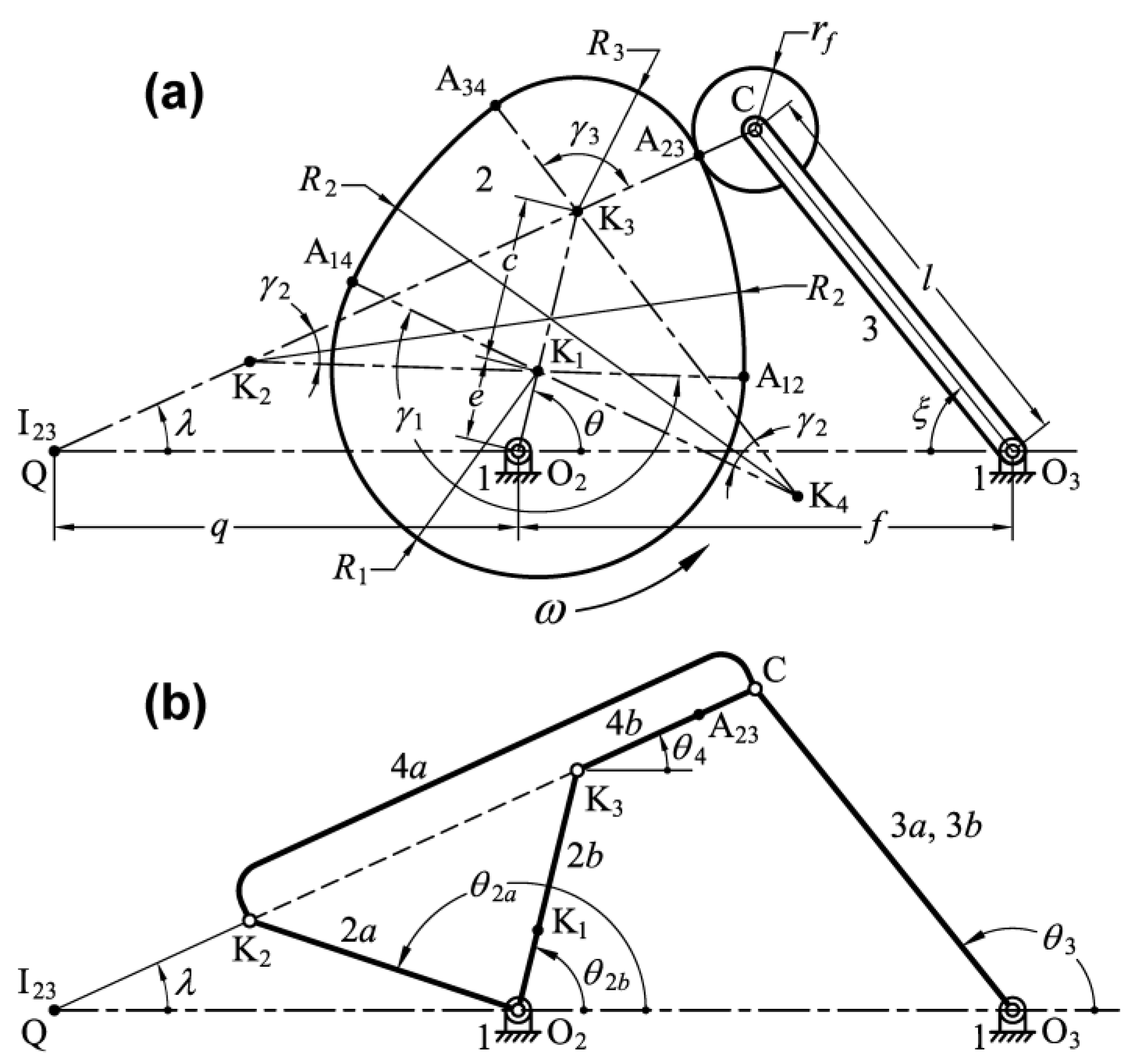
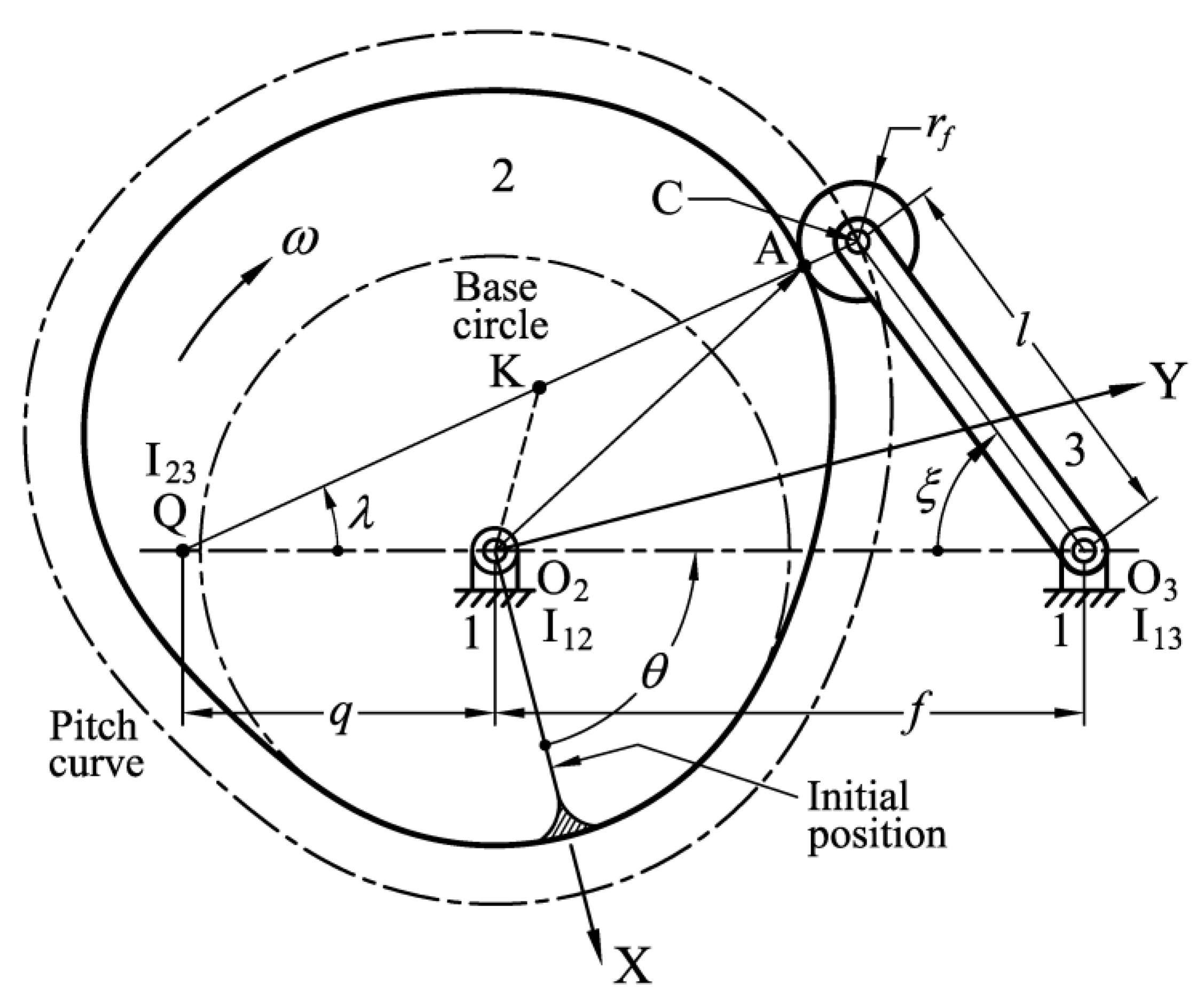
Figure 3a illustrates a disk cam mechanism, consisting of a frame (link 1), a circular-arc cam (link 2), and an oscillating roller follower (link 3). The cam and the follower are pivoted to the frame on points O2 and O3, respectively, while the center distance is f. The profile of the circular-arc cam is essentially composed of four circular arcs with three radii R1, R2, and R3, respectively. Points K1, K2, K3, and K4 are the circular centers (also the centers of curvature) of the four circular arcs, respectively. Points A12, A23, A34, and A14 on the cam profile are the points of tangency of each two adjacent circular arcs, respectively. The circular arc between points A12 and A14 has a radius of R1 and a circular-arc angle of γ1, the circular arc between points A12 and A23 or between points A14 and A34 has a radius of R2 and a circular-arc angle of γ2, and the circular arc between points A23 and A34 has a radius of R3 and a circular-arc angle of γ3. In this case, points O2, K1, and K3 are collinear, while the distance between points O2 and K1 is e, and that between points K1 and K3 is c. The follower has an arm length of l and a roller radius of rf. The cam rotation angle θ is measured counterclockwise from line O2O3 to line O2K1, while the angular position of the follower ξ is measured clockwise from line O2O3 to line O3C for point C being the roller center. When the values of R1, R2, R3, and c are given, then from ΔK1K2K3 (or ΔK1K3K4) and the cosine law, the circular-arc angles γ1, γ2, and γ3 can be determined by
It should be noted that the geometric relation of γ1 + 2γ2 + γ3 = 360° must be satisfied. Once the cam profile has been designed, the angular position of the follower ξ = ξ(θ) can be accordingly determined. The contact normal can also be determined by locating instant center I23. By labeling instant center I23 as Q and O2Q = q, as shown in Figure 3a, point Q can be located by [11,12,17]
From ΔO3QC and the cosine law, line QC, which is collinear with the contact normal, can then be determined by
Thus, from ΔO3QC and the sine law, the angular position of the contact normal λ, measured counterclockwise from line O2O3 to line QC, can be expressed as

Figure 3.
Illustration of a disk cam mechanism with a circular-arc cam and an oscillating roller follower and its equivalent four-bar linkages; (a) the disk cam mechanism and (b) the equivalent four-bar linkages.
The equivalent linkage of this disk cam mechanism is a four-bar linkage whose coupler connects the circular center of one of the four circular-arc profiles and the roller center. The equivalent linkage corresponding to each circular-arc profile is an invariant one (i.e., its link lengths are invariant). Thus, the disk cam mechanism can be successively replaced by four invariant equivalent linkages (with different constant link lengths), as the circular-arc cam rotates a complete cycle. However, when considering a special situation that the contact point between the cam and the follower is point A23 (or one of the remaining three points of tangency), the equivalent four-bar linkages at that instant are shown in Figure 3b. It can be observed that two equivalent four-bar linkages O2K2CO3 and O2K3CO3 simultaneously exist at that instant. For clarity of illustration, the four-bar linkage O2K2CO3 consists of links 1, 2a, 3a, and 4a, and the four-bar linkage O2K3CO3 consists of links 1, 2b, 3b, and 4b. The links 3a and 3b overlap with each other. The couplers 4a and 4b, also overlapping with each other, are collinear with the common normal at the contact point A23 that passes through points Q, K2, K3, and C at that instant.
For the four-bar linkages that are shown in Figure 3b, their link lengths are r1 = O2O3 = f, r2a = O2K2, r2b = O2K3 = e + c, r3a = r3b = O3C = l, r4a = K2C = R2 + rf and r4b = K3C = R3 + rf. The angular positions of links, θ2a, θ2b, θ3, and θ4, are measured counterclockwise from line O2O3. From ΔO2K2K3 and the cosine law, the link length of r2a can be further determined by
From ΔO2K3C and the cosine law, the distance O2C at that instant can be determined by
Hence, from ΔO2K3C, ΔO2O3C, and the cosine law, the values of the cam rotation angle θ and the angular position of the follower ξ at that instant can be determined by
Subsequently, the values of θ2a and θ2b at that instant can be determined by
Additionally, the values of θ3 and θ4 at that instant can be determined by
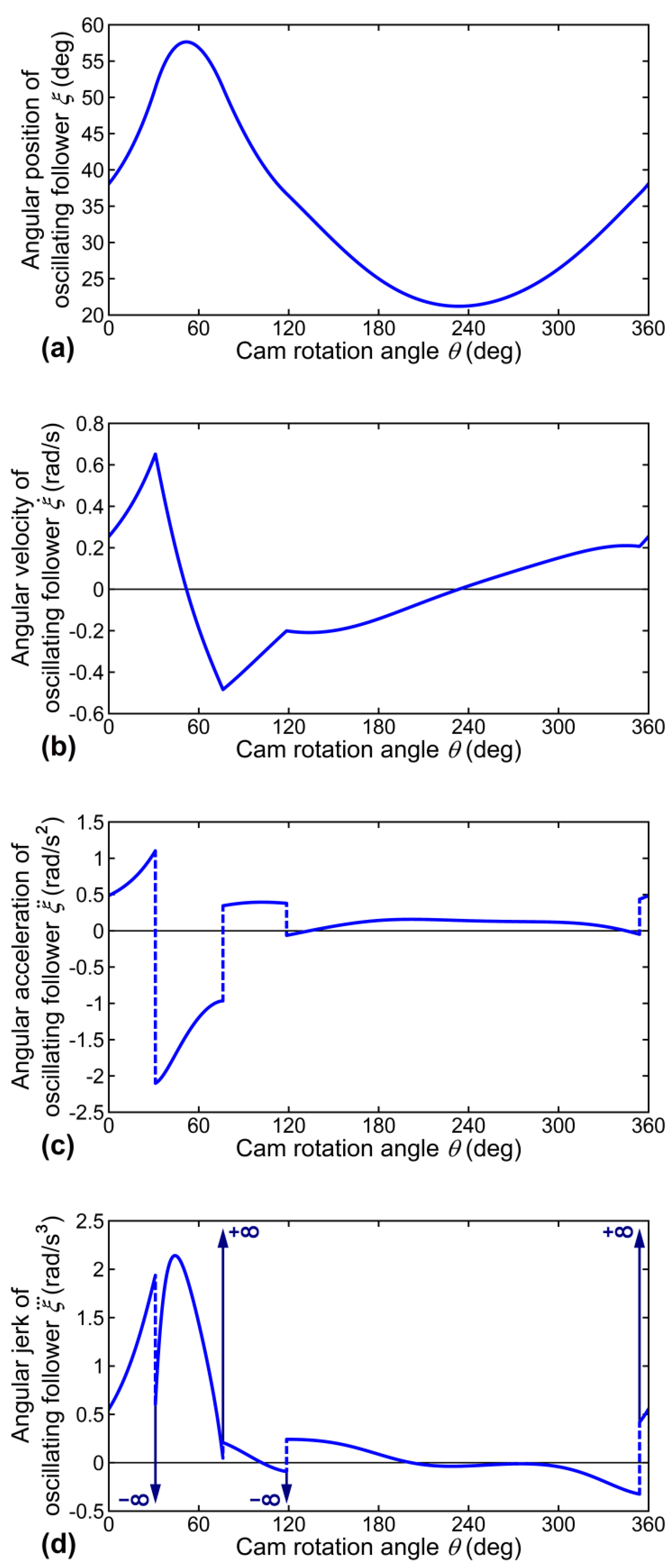
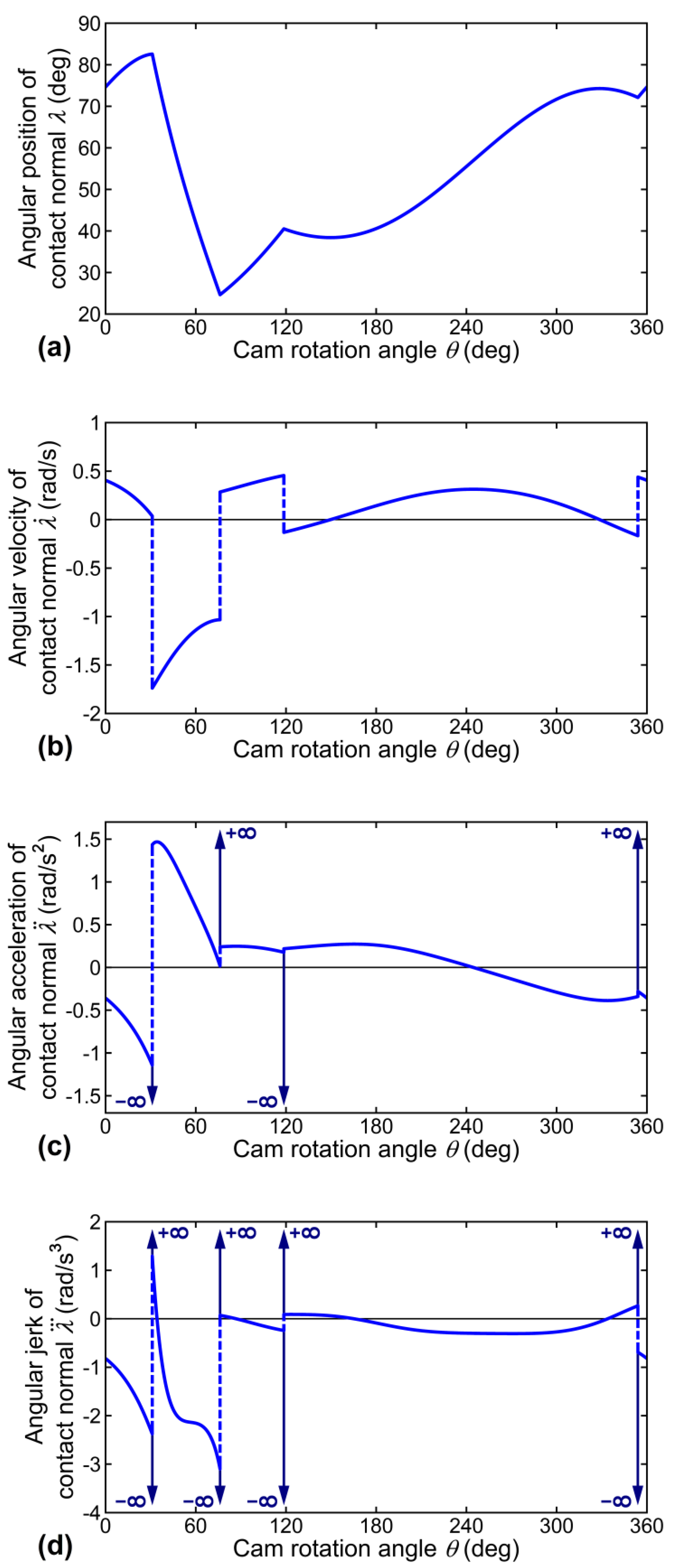
It is known that when the circular-arc cam rotates a complete cycle, the follower will instantaneously undergo non-continuous accelerations and infinite jerks as the circular-arc cam is in contact with the follower at one of the four points of tangency (i.e., points A12, A14, A34, and A23) successively, although the velocity of the follower can be continuous at those instants. A practical example is given in order to evaluate such phenomena. A circular-arc cam with R1 = 50 mm, R2 = 120 mm, R3 = 32.5 mm, c = 40 mm, and e = 20 mm is designed to drive an oscillating roller follower with l = 100 mm and rf = 15 mm, while the center distance is f = 120 mm. From Equations (19) to (21), the circular-arc angles are γ1 = 203.832°, γ2 = 26.570°, and γ3 = 103.028°. Such a disk cam mechanism is proportionally shown in Figure 3a. The circular-arc cam is specified to rotate counterclockwise with a constant angular velocity of ω = 1 rad/s. The angular position of the follower, ξ, in a complete cam rotation cycle is shown in Figure 4a, while its corresponding time derivatives (i.e., the angular velocity acceleration and jerk obtained through the use of numerical differentiation, are shown in Figure 4b–d. The follower obviously undergoes non-continuous accelerations and infinite jerks when θ = 31.076°, 76.168°, 118.6°, and 354.043°. Additionally, Figure 5a shows the angular position of the contact normal, λ, in a complete cam rotation cycle, while its corresponding time derivatives (i.e., the angular velocity acceleration and jerk obtained through the use of numerical differentiation, are shown in Figure 5b–d. Although the contact normal can have continuously varying angular positions, it obviously undergoes non-continuous velocities and infinite accelerations and jerks when θ = 31.076°, 76.168°, 118.6°, and 354.043°. When the contact point between the cam and the follower is point A23 as shown in Figure 3a, link lengths of the equivalent four-bar linkages shown in Figure 3b are r1 = f = 120 mm, r2a = O2K2 = 68.716 mm [from Equation (25)], r2b = O2K3 = e + c = 60 mm, r3a = r3b = O3C = l = 100 mm, r4a = K2C = R2 + rf = 135 mm, and r4b = K3C = R3 + rf = 47.5 mm. At that instant, from Equations (27) to (31), θ = 76.168°, ξ = 51.328°, θ2a = 161.538°, θ2b = 71.168°, θ3 = 128.672°, and θ4 = 24.654° can be obtained. For the equivalent four-bar linkage O2K2CO3 (consisting of links 1, 2a, 3a, and 4a), its angular velocities, accelerations, and jerks at that instant, calculated by using Equations (1) to (6) with ω2 = 1 rad/s, α2 = 0 rad/s2, and ζ2 = 0 rad/s3, are
For the equivalent four-bar linkage O2K3CO3 (consisting of links 1, 2b, 3b, and 4b), its angular velocities, accelerations, and jerks at that instant, calculated by using Equaions (1) to (6), are
It is found that ω3a = ω3b = 0.484 rad/s and α3a ≠ α3b, which agree with the situations that are shown in Figure 4b,c that the follower undergoes a non-continuous angular acceleration, although its angular velocity can be continuous at that instant. However, it is also found that ζ3a = −0.209 rad/s3 and ζ3b = −0.047 rad/s3 are finite values, which cannot correctly reflect an instantaneously infinite follower jerk as that shown in Figure 4d. As to the results of the coupler, it can be found that ω4a ≠ ω4b, which agrees with the situation shown in Figure 5b that the contact normal undergoes a non-continuous angular velocity, although its angular position can be continuous at that instant. However, the remaining results of α4a = 0.242 rad/s2, α4b = 0.018 rad/s2, ζ3a = −0.209 rad/s3, and ζ3b = −0.047 rad/s3 are all finite values, which cannot correctly reflect the instantaneously infinite acceleration and jerk as those shown in Figure 5c,d.

Figure 4.
Angular motion curves of the follower for a disk cam mechanism with a circular-arc cam and an oscillating roller follower; (a) the angular position, (b) the angular velocity, (c) the angular acceleration, and (d) the angular jerk of the follower.

Figure 5.
Angular motion curves of the contact normal for a disk cam mechanism with a circular-arc cam and an oscillating roller follower; (a) the angular position, (b) the angular velocity, (c) the angular acceleration, and (d) the angular jerk of the contact normal.
In this case study, when the circular-arc cam is in contact with its follower at a point of tangency of two adjacent circular arcs, the coupler acceleration of the equivalent linkage, α4, does not agree with the angular acceleration of the contact normal, at that instant. Unreasonable values of α4 obtained in acceleration analysis [with the use of Equation (4)] unavoidably lead to incorrect values of ζ3 and ζ4 when performing jerk analysis because α4 is involved in both Equations (5) and (6).
In addition, if a special case of R1 = R2 = R3 and c = 0 is given, the circular-arc cam will degenerate to an eccentric circular cam, while points K1, K2, K3, and K4 will coincide with the circular center of the eccentric circular cam. It is known that an eccentric circular cam mechanism has an invariant equivalent four-bar linkage (without link-length variations) that can completely duplicate the motion transmission between the cam and the follower [3]. Such an invariant equivalent four-bar linkage can give correct values of angular velocity, acceleration, and jerk for all instants. As compared with the eccentric circular cam profile having constant curvature, the curvature of the circular-arc cam is suddenly changed at the points of tangency of each two adjacent circular arcs. As the circular-arc cam and its follower are in contact at such a point of tangency, the suddenly changed curvature of the cam profile is not considered in sudden link-length variations of the equivalent four-bar linkages. Thus, the two equivalent four-bar linkages simultaneously existing at that instant are both not able to correctly reflect an infinite jerk of the follower.
5. Kinematic Analysis for Direct-Contact Mechanisms Consisting of Higher Pairs with Continuously Varying Curvature: Disk Cam Mechanisms with a Double-Dwell Cam and an Oscillating Roller Follower
For a direct-contact mechanism consisting of higher pairs with continuously varying curvature, some link lengths of its equivalent four-bar linkage may continuously vary during the whole motion cycle. The disk cam mechanism with a double-dwell cam and an oscillating roller follower is a representative one of this type of direct-contact mechanisms. Thus, kinematic analysis for such a disk cam mechanism is presented in this Section.
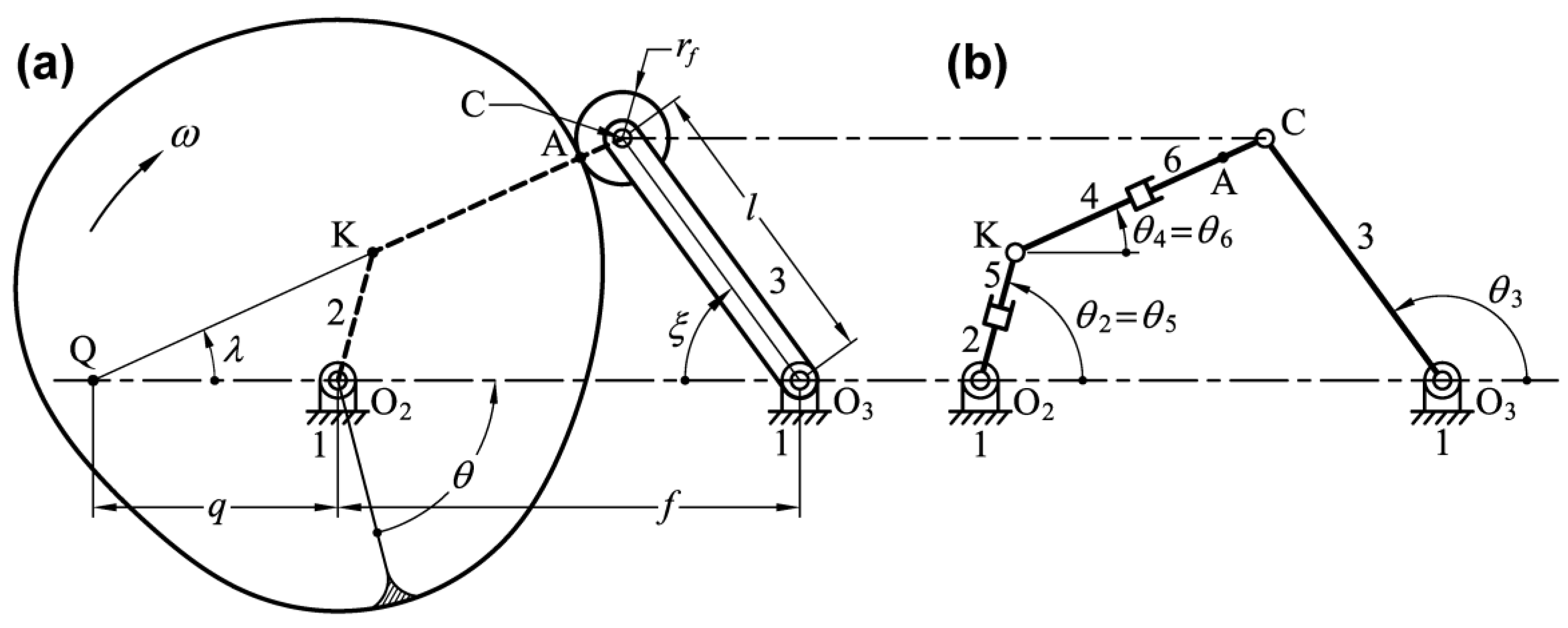
Figure 6 illustrates a disk cam mechanism, consisting of a frame (link 1), a double-dwell cam (link 2), and an oscillating roller follower (link 3). The cam and the follower are pivoted to the frame on points O2 and O3, respectively, while the center distance is f. The follower has an arm length of l and a roller radius of rf. The contact normal always passes through the roller center C, the contact point A, the center of curvature of the cam profile K, and also the instant velocity center I23. By setting up a Cartesian coordinate system X-Y fixed on the cam and with its origin at the fixed pivot O2, the cam profile coordinates may be expressed in terms of the cam rotation angle θ, which is measured against the direction of cam rotation from the reference radial on cam to line O2O3. The cam is to rotate clockwise with a constant angular velocity of ω rad/s. By labeling instant center I23 as Q and O2Q = q, the parametric vector equations of the theoretical cam profile coordinates can be expressed as [12,17,18]
where
in which, ξ(θ) is the angular displacement function of the oscillating follower [12,17,18]:
where, rb is the radius of the base circle and s(θ) is the prescribed angular displacement program (or called displacement curve [17]) of the follower. Thus, v(θ) [= ds(θ)/dθ] in Equation (35) is the angular velocity curve of the follower (in unit of rad/rad or dimensionless). It can be seen that line QC is the contact normal between the cam and the roller follower. Additionally, the parametric vector equations of the pitch curve coordinates can be expressed as [18]
The radius of curvature of the pitch curve, ρC, can then be determined by [18]
where, a = a(θ) [= dv(θ)/dθ] is the angular acceleration curve of the follower (in unit of rad/rad2 or 1/rad). Therefore, the radius of curvature of the cam profile, ρ, can be obtained by [18]

Figure 6.
Illustration of a disk cam mechanism with a double-dwell cam and an oscillating roller follower.
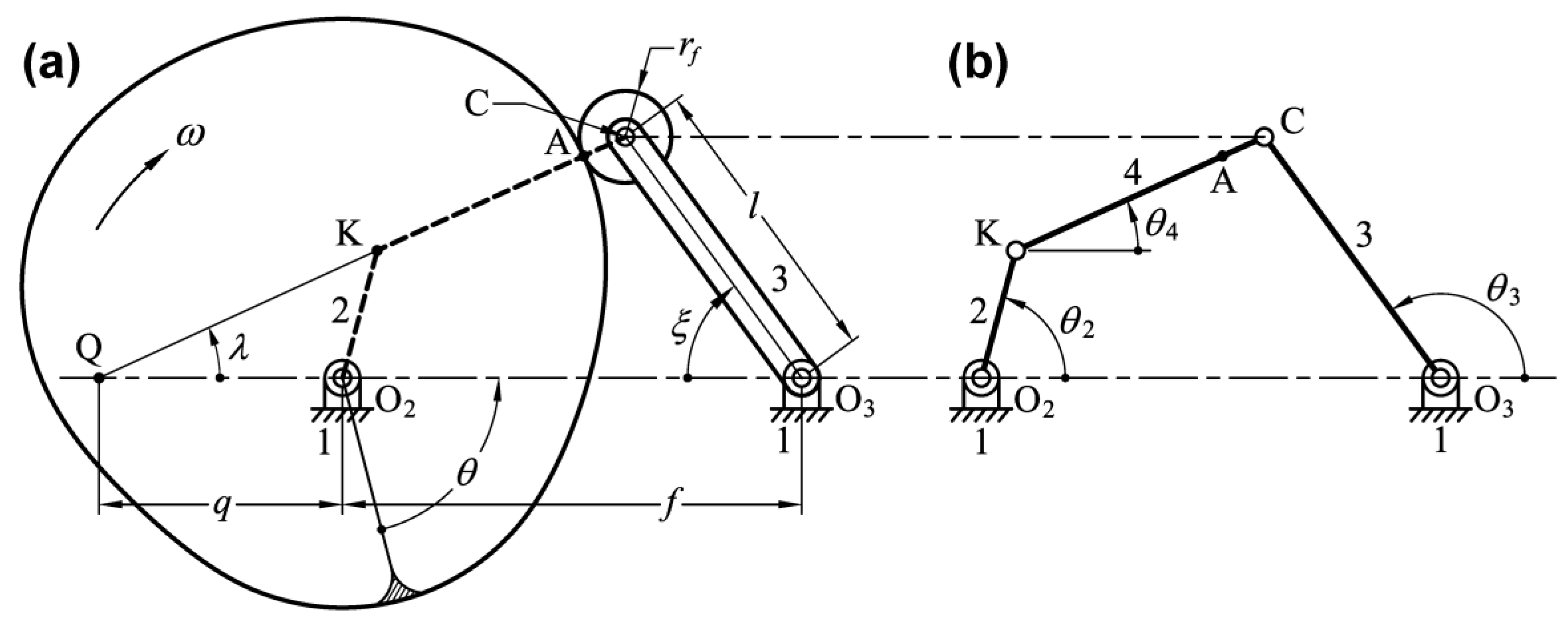
The equivalent linkage of this disk cam mechanism is a four-bar linkage whose coupler connects the center of curvature of the cam profile, K, and the roller center, C, as shown in Figure 7. For the four-bar linkage O2KCO3 shown in Figure 7b, its link lengths are r1 = O2O3 = f, r2 = O2K, r3 = O3C = l, and r4 = KC = ρC = ρ + rf, and the angular positions of links, θ2, θ3, and θ4, are measured counterclockwise from line O2O3. It must be noted that the values of ρC and ρ are positive when the corresponding cam profile is convex, as the figure shows. When part of the cam profile is concave, the corresponding values of ρC and ρ are negative, and the corresponding coupler length will be r4 = KC = −ρC = −(ρ + rf). From ΔO2QK and the cosine law, the link length of r2 can be further determined by
in which, the length QK corresponding to a convex cam profile, as shown in Figure 7a, is
Subsequently, the values of θ2, θ3, and θ4 can be determined by
Because the double-dwell cam profile is with continuously varying curvature, the link lengths r2 and r4 of its equivalent linkage therefore continuously vary with respect to the cam rotation angle θ.

Figure 7.
Illustration of a disk cam mechanism with a double-dwell cam and an oscillating roller follower and its equivalent four-bar linkage; (a) the disk cam mechanism and (b) the equivalent four-bar linkage.
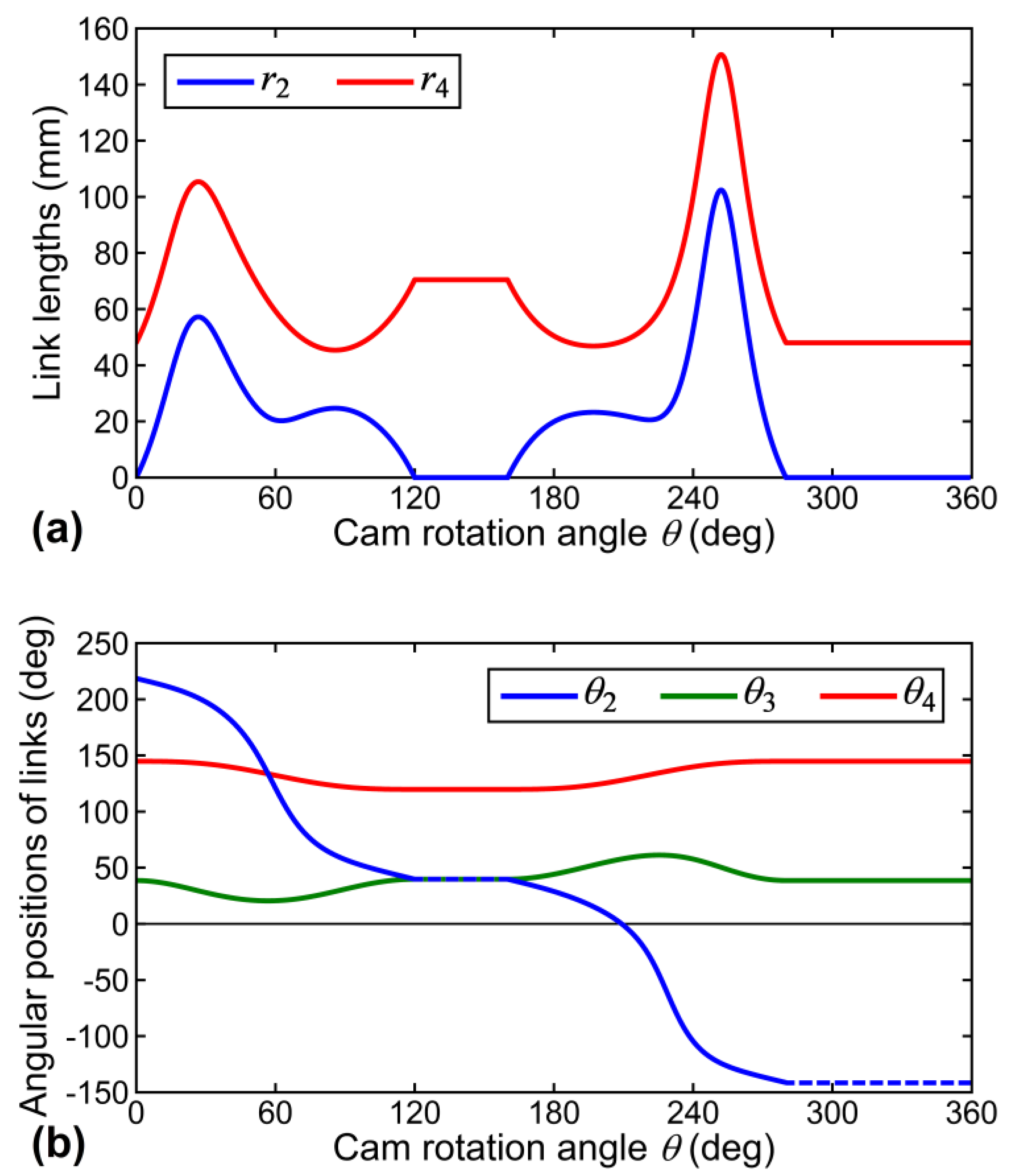
A practical example is given in order to evaluate the kinematic characteristics of the equivalent four-bar linkage. A cam system requires the oscillating roller follower to oscillate 25° clockwise with cycloidal motion [17,19] while the cam rotates clockwise from 0° to 120°, dwell for the next 40°, return with cycloidal motion [17,19] for 120° cam rotation, and dwell for the remaining 80°. The design parameters for the cam mechanism are: f = 80 mm, l = 52 mm, rb = 40 mm, and rf = 8 mm. Such a disk cam mechanism is proportionally shown in Figure 6 and Figure 7a. The double-dwell cam is specified to rotate clockwise with a constant angular velocity of ω = 1 rad/s. Figure 8 shows the variations of link lengths and angular positions for the equivalent linkage of the disk cam mechanism. As seen, the link lengths of r2 and r4 are continuously variable. The link length of r2 is zero when θ = 120°~160° and θ = 280°~360°, for which the follower dwells. The link length of r4 essentially agrees with the radius of curvature of the pitch curve, ρC. The variational curve of θ2 is specially drawn by dashed lines when θ = 120°~160° and θ = 280°~360°, since the situations of r2 = 0 and QK = 0 simultaneously occur to yield an undefined result of tan−1(0/0) in Equation (44). Additionally, the variational curves of θ3 and θ4 essentially agree with the variational trends of (180° − ξ) and λ, respectively.

Figure 8.
Variations of link lengths and angular positions for an equivalent four-bar linkage of a disk cam mechanism with a double-dwell cam and an oscillating roller follower; (a) the link lengths and (b) the angular positions of links.
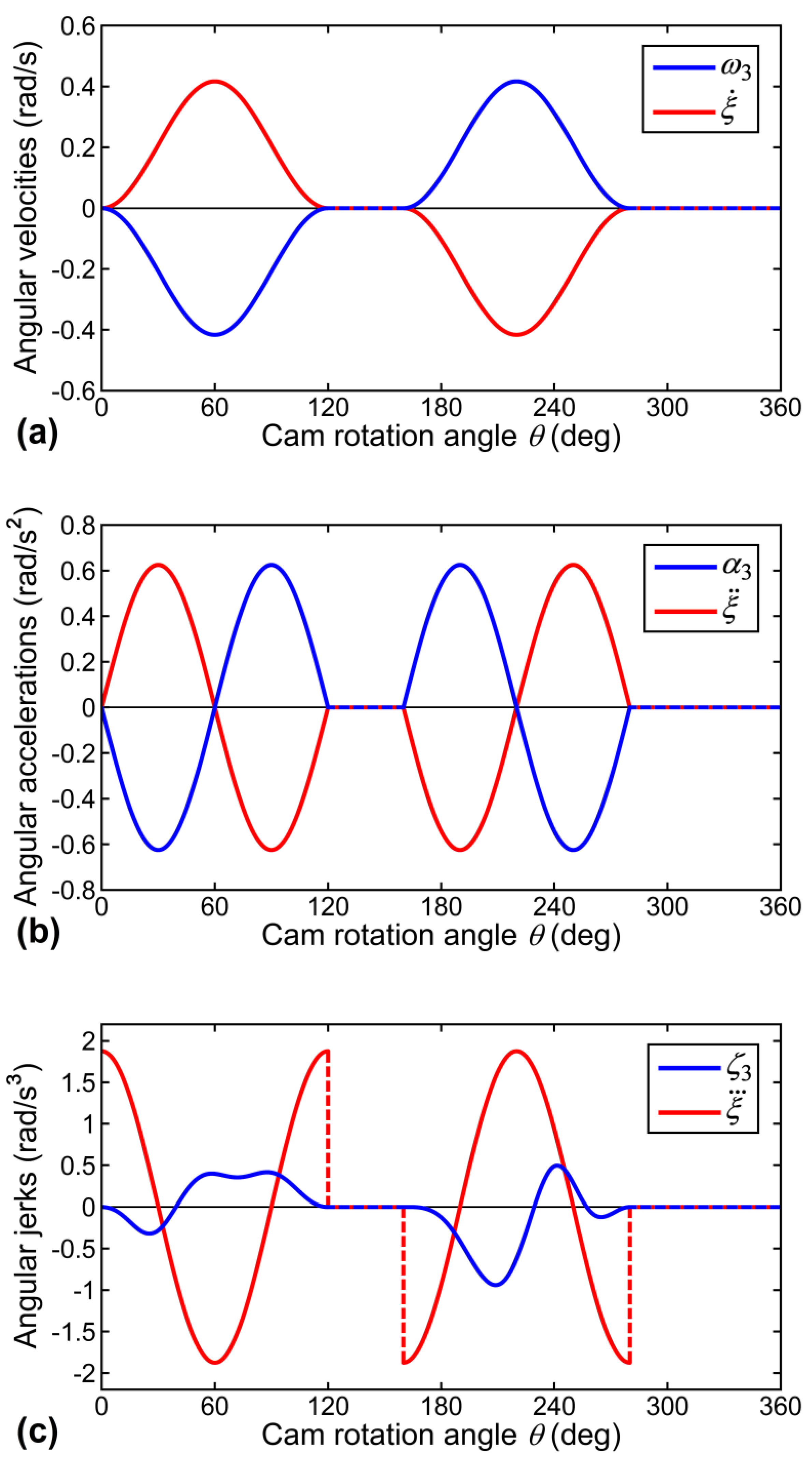
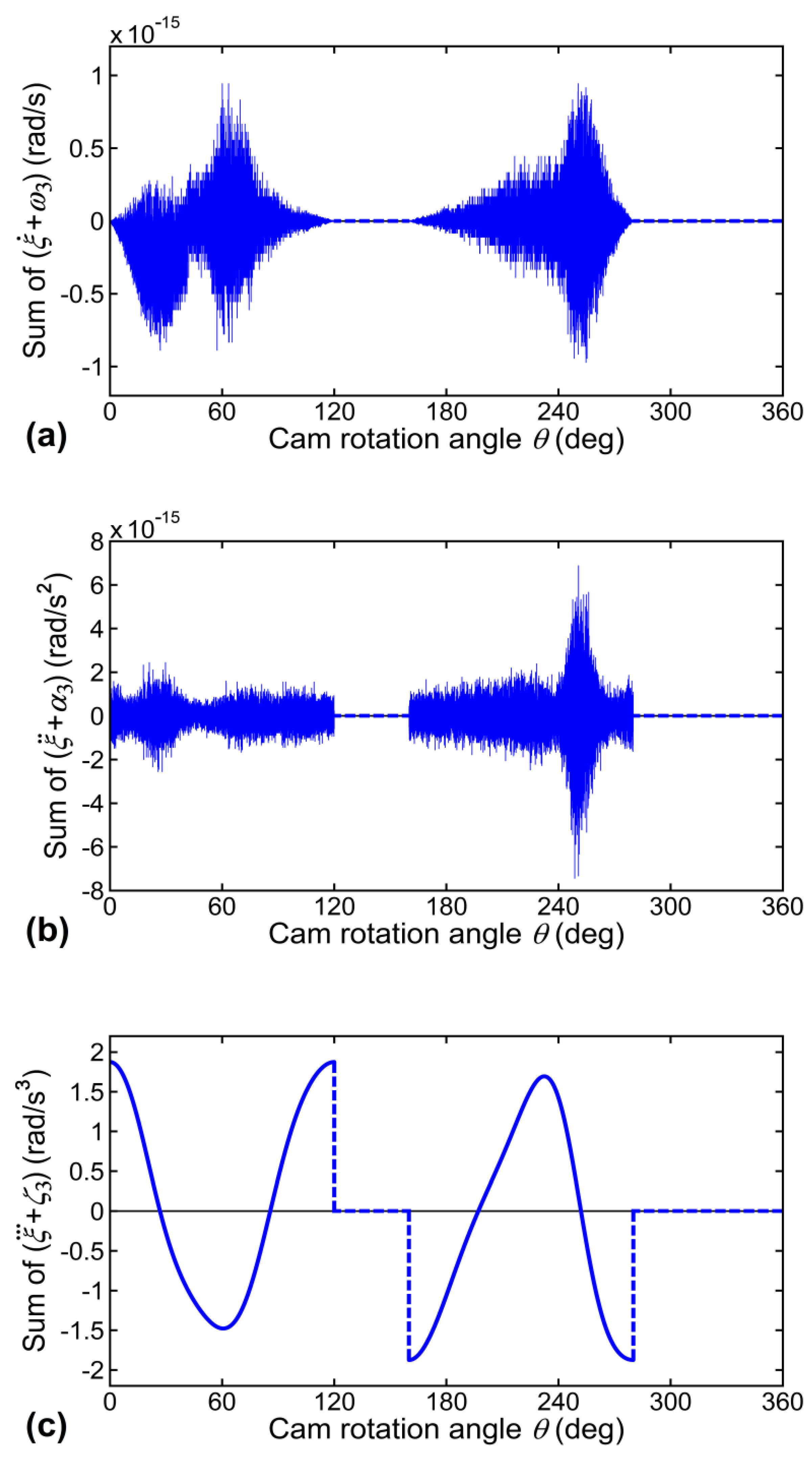
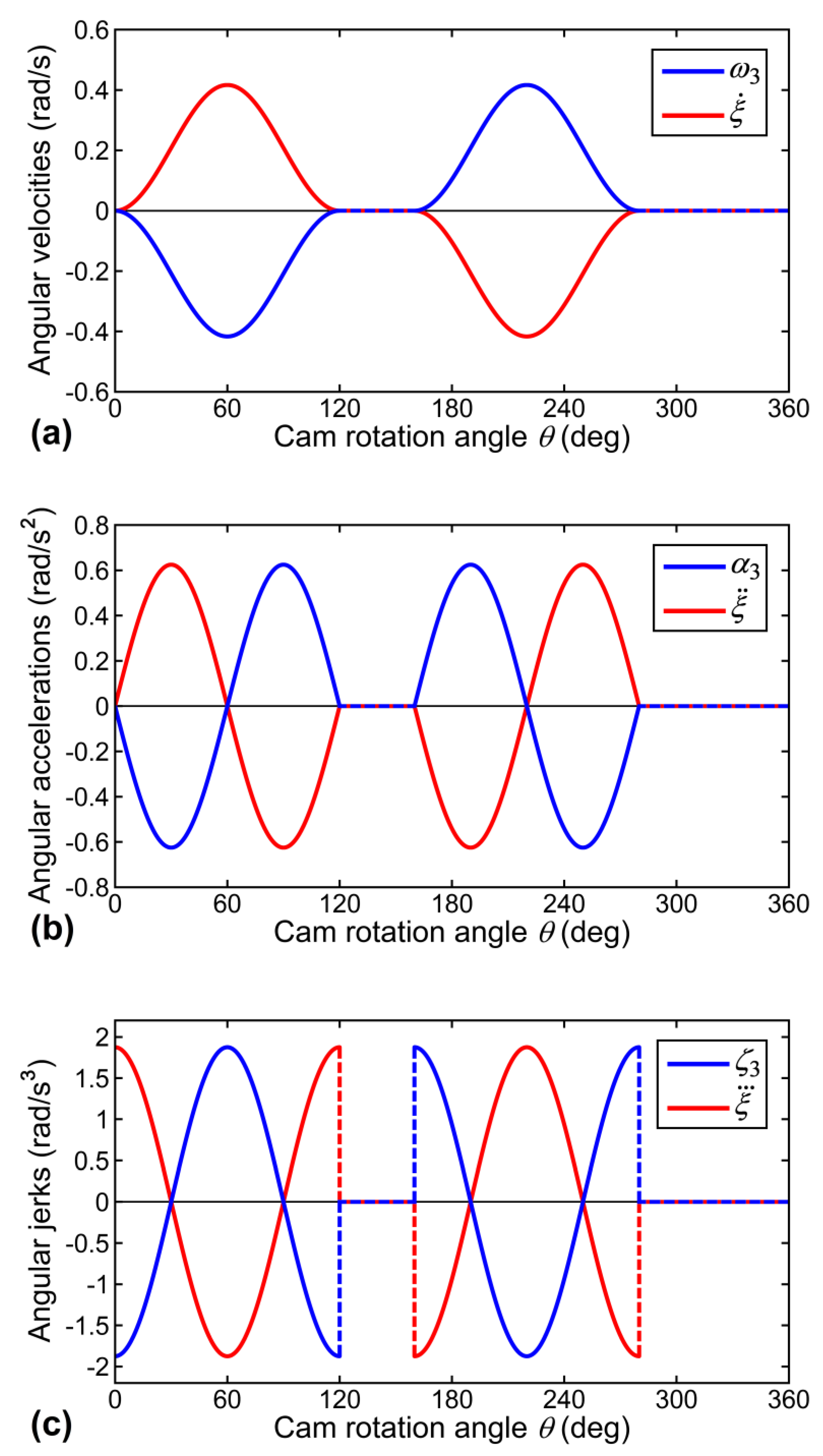
The kinematic analysis results for the equivalent four-bar linkage [calculated by using Equations (1), (3), and (5) with ω2 = 1 rad/s, α2 = 0 rad/s2 and ζ2 = 0 rad/s3], as well as the angular velocity acceleration and jerk of the follower, are all shown in Figure 9. The situations of and can be intuitively observed in the figure. Comparison results between the obtained motion curves are presented in Figure 10 in order to justify the situations. The numerical result for sum of merely ranges between ±1 × 10−15 rad/s, and that for sum of also merely ranges between ±8 × 10−15 rad/s2. The negligible numerical errors can justify the correctness of and However, the numerical result for sum of considerably ranges between ±1.88 rad/s3. As a result, the equivalent four-bar linkage of the presented disk cam mechanism with a double-dwell cam and an oscillating roller follower is not able to give a correct value of jerk.

Figure 9.
Kinematic analysis results for a disk cam mechanism with a double-dwell cam and an oscillating roller follower and its equivalent four-bar linkage; (a) the angular velocities, (b) the angular accelerations, and (c) the angular jerks.

Figure 10.
Comparison results between motion curves obtained in Figure 9; (a) the sum of angular velocities, (b) the sum of angular accelerations, and (c) the sum of angular jerks.
The double-dwell cam that is presented in this case study is an ordinary disk cam profile with continuously varying curvature. Thus, its equivalent four-bar linkage corresponding to two infinitesimally closed profile points in contact with the follower cannot exactly have identical link lengths. For most disk cam mechanisms, it can be deduced that their equivalent four-bar linkages should not be able to give a correct value of jerk, because the continuously varying curvature of the cam profiles is not considered in continuous link-length variations of their equivalent four-bar linkages.
6. Kinematic Analysis for Direct-Contact Mechanisms Consisting of Higher Pairs with Continuously Varying Curvature via the Concept of Equivalent Six-Bar Linkage
In the above three case studies, almost all of the results indicate that the equivalent four-bar linkage for a direct contact mechanism cannot give a correct value of jerk. Especially the two case studies for disk cam mechanisms both indicate that the influence of suddenly changed or continuously varying curvature of the cam profile on sudden or continuous link-length variations of the equivalent four-bar linkage is not considered, which could be a major cause of incorrectness in jerk analysis. In order to justify this deduction, the concept of “equivalent six-bar linkage” for disk cam mechanisms considering the time rate of change of the cam profile curvature is presented in this Section. Kinematic analysis of the equivalent six-bar linkage for the disk cam mechanism that is presented in Section 5 is performed in order to evaluate whether the equivalence of a disk cam mechanism and its equivalent six-bar linkage in jerk analysis can exist.
For the disk cam mechanism that is shown in Figure 11a (the same as those shown in Figure 6 and Figure 7a), its equivalent six-bar linkage shown in Figure 11b consists of a frame (link 1), a frame-pivoted linear actuator (links 2 and 5), a floating linear actuator (links 4 and 6), and a frame-pivoted arm (link 3). Each linear actuator essentially consists of two links that are connected by a prismatic joint, such as a slider in its guide, so that the two links can have a relative translation in one direction. Links 4 and 5 in the linear actuators are pinned on the center of curvature of the cam profile, K, while links 2 and 6 in the linear actuators are pinned on the fixed pivot O2 and on the roller center C, respectively. The link lengths of the six-bar linkage are defined as r1 = O2O3 = f, r2 = O2K, r3 = O3C = l, and r4 = KC = ρC = ρ + rf, and the angular positions of links, θ2, θ3, θ4, θ5, and θ6, are measured counterclockwise from line O2O3. Although the configuration of the six-bar linkage is identical to that of the four-bar linkage shown in Figure 7b, its link lengths of r2 and r4 are both variables that can exactly reflect the time rate of change of the cam profile curvature. That is, at any instant, r2 is a variable that describes the relative displacement in the frame-pivoted linear actuator (links 2 and 5) between points O2 and K, and r4 is a variable that describes the relative displacement in the floating linear actuator (links 4 and 6) between points K and C. For such a single-loop six-bar linkage with three degree-of-freedom, by specifying θ2, r2, and r4 as the three input parameters, a constrained motion can be achieved. Since θ2 = θ5 and θ4 = θ6, by using the vector loop method, the two unknowns θ3 and θ4 in displacement equations can be solved simultaneously. Alternatively, Equations (40) to (46) can also be used to determine the values of r2, r4, θ2, θ3, and θ4.

Figure 11.
Illustration of a disk cam mechanism with a double-dwell cam and an oscillating roller follower and its equivalent six-bar linkage; (a) the disk cam mechanism and (b) the equivalent six-bar linkage.
By using the vector loop method to solve the velocity equations simultaneously, the analytical expressions of the angular velocities of link 3 (ω3) and links 4 and 6 (ω4) can be derived as
in which, ω2 and are the known input velocities, which can be determined through the first time derivatives of θ2, r2, and r4 shown in Equations (40) to (44). Subsequently, by using the vector loop method to solve the acceleration equations simultaneously, the analytical expressions of the angular accelerations of link 3 (α3) and links 4 and 6 (α4) can be derived as
in which, α2 and are the known input accelerations, which can be determined through the second time derivatives of θ2, r2, and r4 shown in Equations (40) to (44). Furthermore, by using the vector loop method to solve the jerk equations simultaneously, the analytical expressions of the angular jerks of link 3 (ζ3) and links 4 and 6 (ζ4) can be derived as
in which, ζ2 and are the known input jerks, which can be determined through the third time derivatives of θ2, r2, and r4 shown in Equations (40) to (44). The derived analytical expressions can be used to evaluate the kinematic characteristics of the equivalent six-bar linkage obtained from a direct-contact mechanism.
The practical example that is given in Section 5 is adopted again in order to evaluate the kinematic characteristics of the equivalent six-bar linkage. The variations of link lengths and angular positions for the equivalent six-bar linkage are the same as those shown in Figure 8. It must be noted that, according to the influence of the time rate of change of the cam profile curvature on the link-length variations, the angular velocity of the frame-pivoted linear actuator (ω2) and the linear velocities of both linear actuators and should not be constants while the cam rotates clockwise with a constant angular velocity of ω = 1 rad/s (this situation can also be directly observed in Figure 8 that the variation curves of θ2, r2, and r4 are not horizontals). Thus, the variations of ω2, and with respect to the cam rotation angle θ (that is proportional to time), as well as those for α2, ζ2, and are all estimated through numerical differentiation in this case study, since cumbersome equations must be dealt with for deriving their analytical expressions.
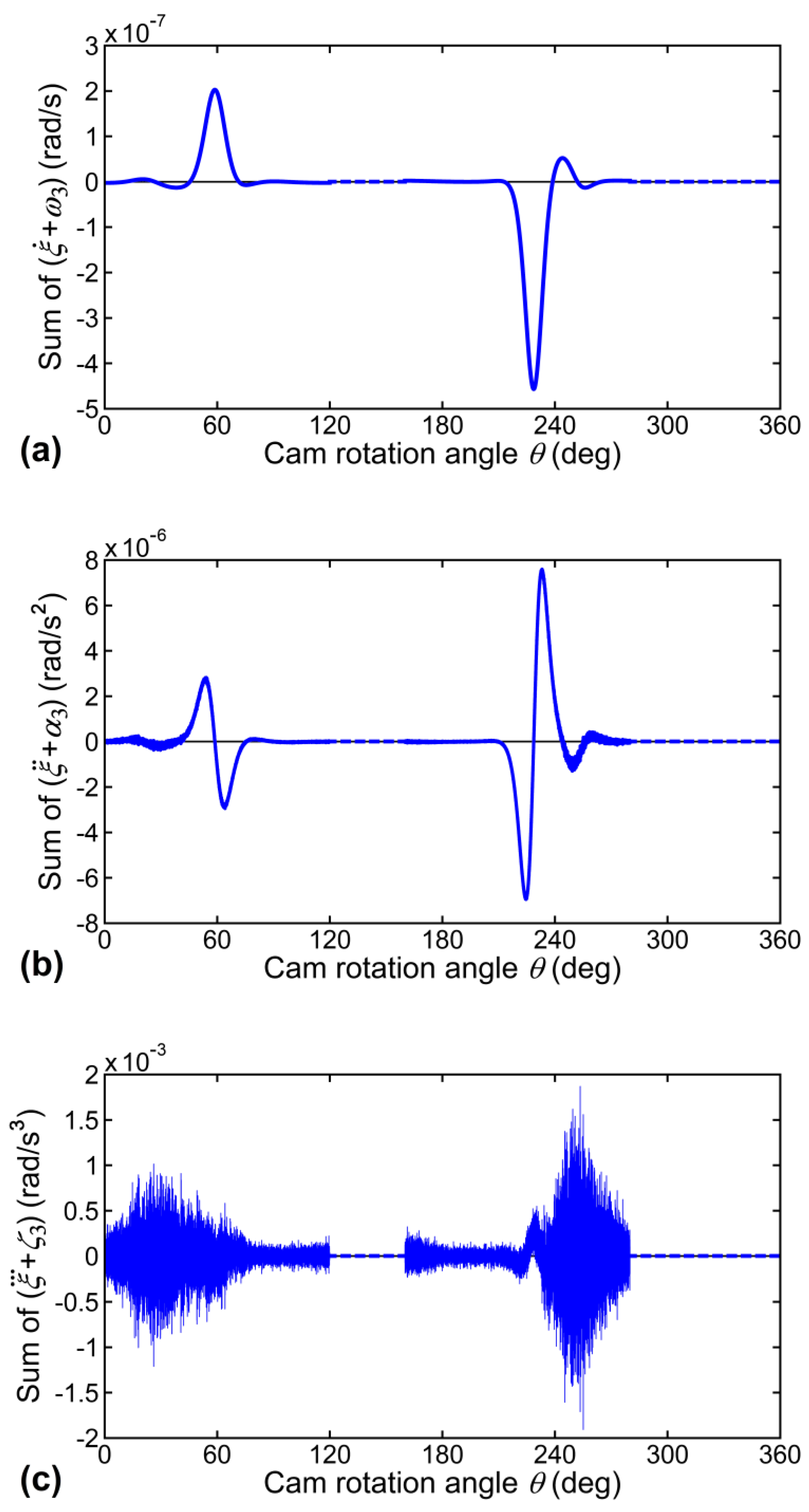
The kinematic analysis results for the equivalent six-bar linkage [calculated by using Equations (47), (49), and (51)], as well as the angular velocity acceleration and jerk of the follower, are all shown in Figure 12. The situations of and can be intuitively observed in the figure. Comparison results between the obtained motion curves are presented in Figure 13 in order to justify the situations. The numerical result for sum of merely ranges between −4.57 × 10−7 and 2.03 × 10−7 rad/s, and that for sum of also merely ranges between −7 × 10−6 and 7.6 × 10−6 rad/s2. As to the numerical result for sum of it meaningfully ranges between −1.91 × 10−3 and 1.87 × 10−3 rad/s3, although the accuracy of ζ3 [calculated by using Equation (51)] is unavoidably influenced by the cumulative errors of ζ2, and (estimated through numerical differentiation). The quite slight numerical errors can justify the correctness of and In this case study, it is found that the equivalent six-bar linkage of a disk cam mechanism with a double-dwell cam and an oscillating roller follower is able to give a correct value of jerk. Likewise, the equivalence of most disk cam mechanisms and their equivalent six-bar linkages in jerk analysis can exist.

Figure 12.
Kinematic analysis results for a disk cam mechanism with a double-dwell cam and an oscillating roller follower and its equivalent six-bar linkage; (a) the angular velocities, (b) the angular accelerations, and (c) the angular jerks.

Figure 13.
Comparison results between motion curves obtained in Figure 12; (a) the sum of angular velocities, (b) the sum of angular accelerations, and (c) the sum of angular jerks.
According to the presented case study, the reasonability of the deduction mentioned above can therefore be justified because the link-length variations of the equivalent six-bar linkage can exactly reflect the time rate of change of the cam profile curvature and result in the correctness in jerk analysis.
7. Discussion
Some issues addressed in this study are considered and discussed in this Section.
7.1. Major Cause of Infeasibility of Equivalent Four-Bar Linkage
In Section 5 and Section 6, it is found that, for a disk cam mechanism whose cam profile is with continuously varying curvature, its “equivalent six-bar linkage”, rather than its equivalent four-bar linkage, is able to give a correct value of jerk. The coupler angle θ4 is always identical to the angle of the contact normal, λ, as can be observed in Figure 3, Figure 7 and Figure 11. The time derivatives of the coupler angle θ4, as well as the link-length variations of r2 and r4, are actually dominated by the positions (and their time derivatives) of curvature centers of the cam and the follower.
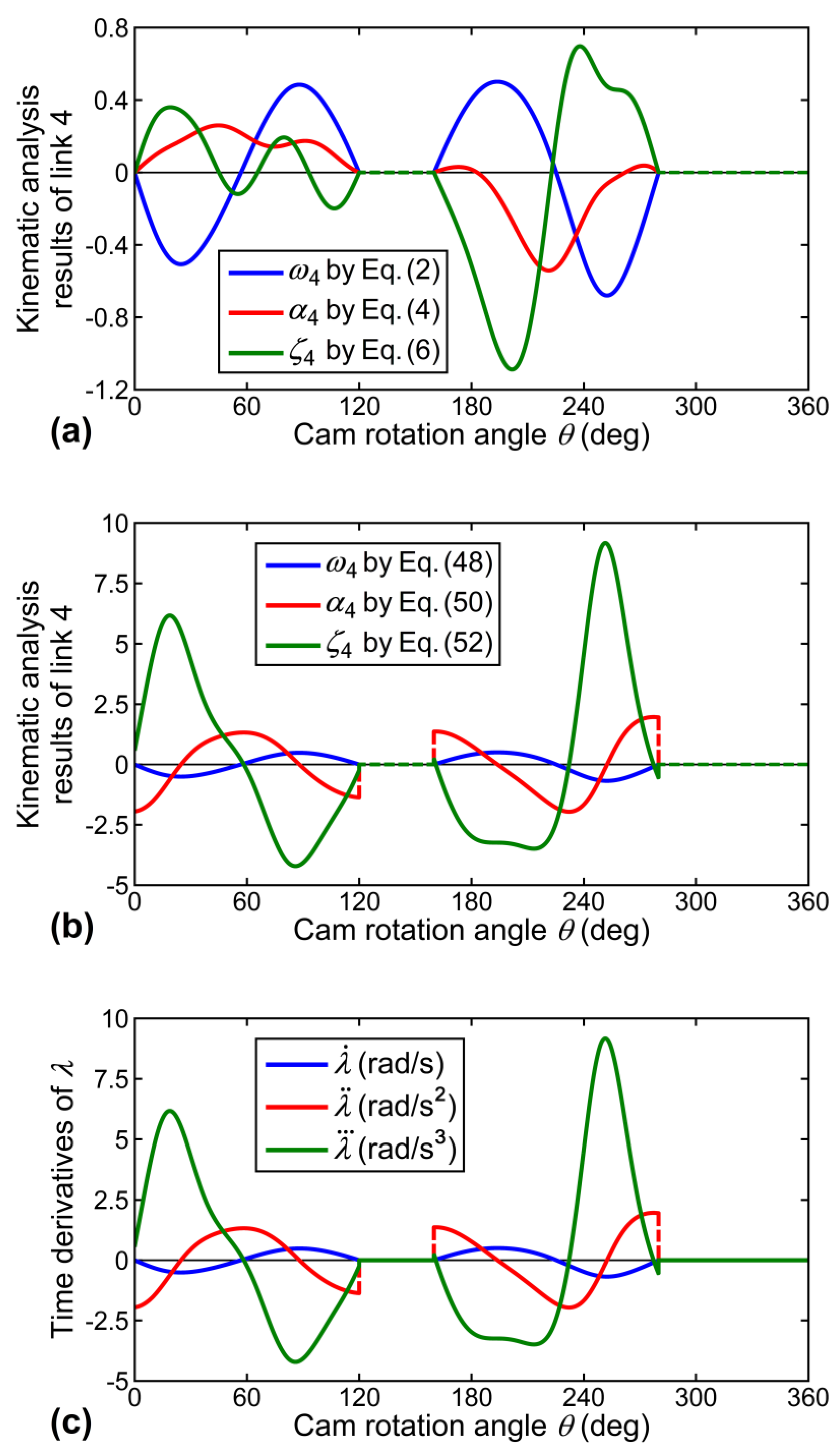
For the practical example that is given in Section 5, the time derivatives of the coupler angle θ4 of the equivalent four-bar linkage, i.e., ω4, α4, and ζ4 calculated by using Equations (2), (4), and (6), respectively, are shown in Figure 14a. Similarly, those of the equivalent six-bar linkage, i.e., ω4, α4, and ζ4 calculated by using Equations (48), (50), and (52), respectively, are shown in Figure 14b. Additionally, the time derivatives of angle λ (i.e., and are shown in Figure 14c. As seen, each variation curve of ω4 calculated by using Equation (2) or (48) can agree with that of However, the variation curves of α4 and ζ4 calculated by using Equations (4) and (6) are totally different to those of and while those of α4 and ζ4 calculated by using Equations (50) and (52) can still agree with those of and Evidently, the angular acceleration and jerk of the coupler of the equivalent four-bar linkage cannot be consistent with those of the contact normal at all instants. Unreasonable values of α4 obtained in acceleration analysis [with the use of Equation (4)] will further lead to incorrect values of ζ3 and ζ4 when performing jerk analysis because α4 is involved in both Equations (5) and (6). Such a situation is consistent with that observed in Section 4 (when the circular-arc cam is in contact with its follower at a point of tangency of two adjacent circular arcs, the coupler acceleration does not agree with the angular acceleration of the contact normal at that instant). Therefore, for a disk cam mechanism whose cam profile is with continuously varying curvature, its equivalent four-bar linkage can provide correct values of angular (or linear) velocity and acceleration for the driven link (i.e., the follower), but can only give correct values of angular velocity for the coupler (i.e., the contact normal).

Figure 14.
Time derivatives of angles θ4 and λ for a disk cam mechanism with a double-dwell cam and an oscillating roller follower and its equivalent four-bar and six-bar linkages; (a) time derivatives of angle θ4 of the equivalent four-bar linkage, (b) time derivatives of angle θ4 of the equivalent six-bar linkage, and (c) time derivatives of angle λ.
In summary, because the suddenly changed or continuously varying curvature of the cam profiles is not considered in sudden or continuous link-length variations of the equivalent four-bar linkage, which leads to inconsistency between the angular accelerations of the coupler and the contact normal, and finally results in the infeasibility of the equivalent four-bar linkage for jerk analysis of most direct-contact mechanisms.
7.2. Higher-Order Time Derivatives for the Equivalent Six-Bar Linkage
According to the fundamental law of cam design [19], the velocity and acceleration functions of the follower must be continuous throughout its entire motion cycle. That is, the follower with properly specified displacement, velocity, acceleration, and jerk functions (i.e., the s-v-a-j diagrams [19,20]) is necessary and sufficient in common cam design. The concept of “equivalent six-bar linkage” can be helpful to construct the s-v-a-j diagrams for a disk cam mechanism based on the kinematic analysis results that are presented in Section 6. Although the evaluation of higher-order time derivatives of the follower motion, such as ping and puff (the fourth and fifth time derivatives of the displacement function) [19], is not necessary in common cam design, it is interesting to find that whether the higher-order time derivatives obtained from the equivalent six-bar linkage are still equivalent to those of a disk cam mechanism. Kinematic analysis of the equivalent six-bar linkage is performed in order to evaluate whether the equivalence of a disk cam mechanism and its equivalent six-bar linkage in ping analysis can exist.
Similar to Equations (47) to (52), by using the vector loop method to solve the ping equations simultaneously, the analytical expressions of the angular pings of link 3 and links 4 and 6 shown in Figure 11b can be derived as
in which, and are the known input pings, which can be determined through the fourth time derivatives of θ2, r2, and r4 shown in Equations (40) to (44).
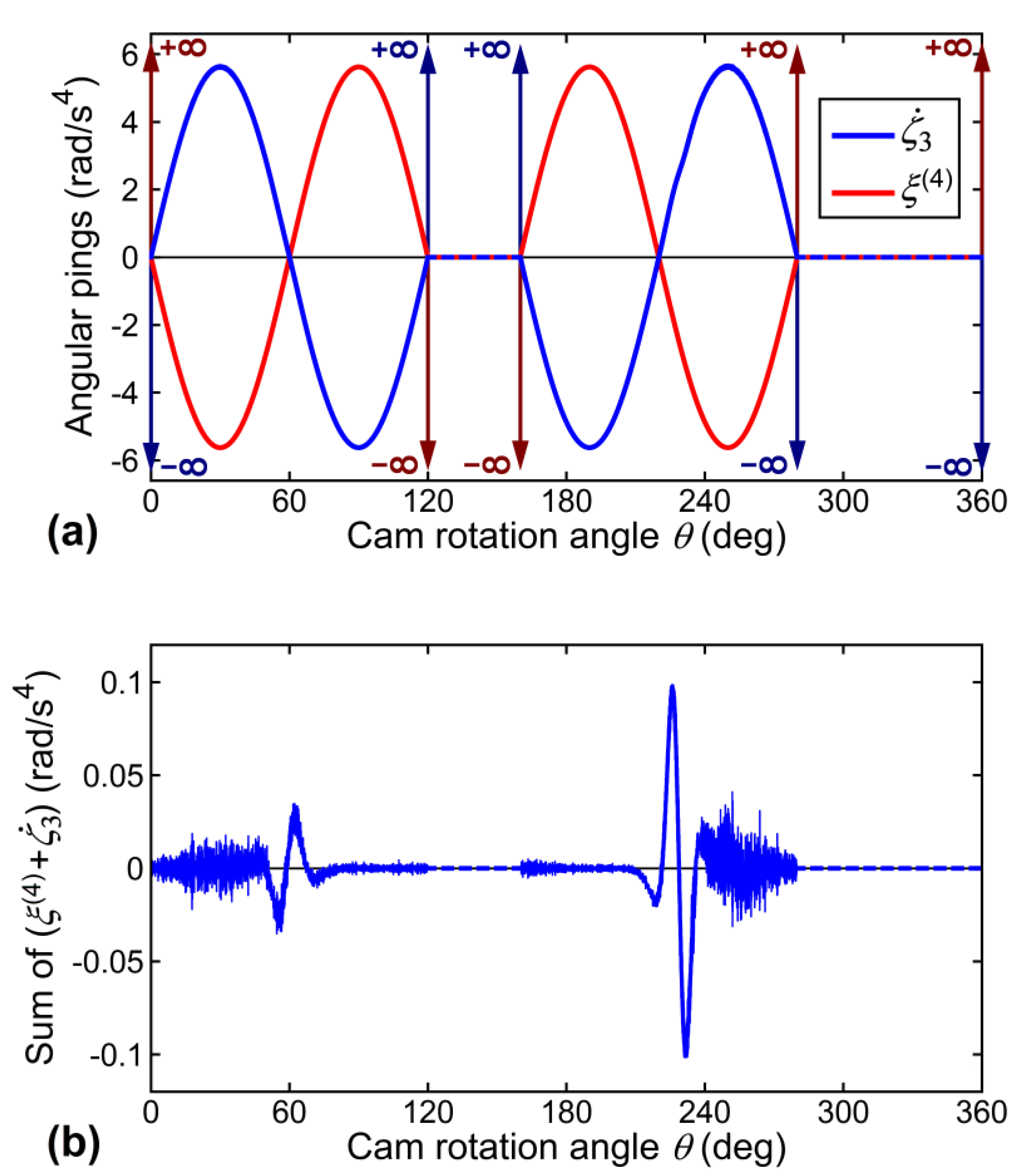
The practical example that is given in Section 5 is adopted again to perform the ping analysis of the equivalent six-bar linkage. The result for the equivalent six-bar linkage [calculated by using Equation (53)], as well as the angular ping of the follower, are both shown in Figure 15a. The situation of can be intuitively observed in the figure. Comparison results between the obtained motion curves are presented in Figure 15b in order to justify the situation. When the values of ±∞ occurred at the limit positions of the follower (at θ = 0°, 120°, 160°, 280°, and 360°) are ignored, the numerical result for sum of significantly ranges between −0.101 and 0.098 rad/s4 although the accuracy of [calculated by using Equation (53)] is unavoidably influenced by the cumulative errors of and (estimated through using numerical differentiation). The slight numerical errors can justify the correctness of As a result, it is found that the equivalent six-bar linkage of a disk cam mechanism with a double-dwell cam and an oscillating roller follower is still able to give a correct value of ping. It can be deduced that the concept of equivalent six-bar linkage could also be applied to evaluate more higher-order time derivatives for most direct-contact mechanisms.

Figure 15.
Ping analysis results for a disk cam mechanism with a double-dwell cam and an oscillating roller follower and its equivalent six-bar linkage; (a) the angular pings and (b) the sum of angular pings.
7.3. Potential Future Work
The equivalent four-bar linkages that are studied in this paper are typical linkages with four revolute joints. For direct-contact mechanisms with a translating driven link (a slider), such as disk cam mechanisms with a translating roller/flat-faced follower, constant-breadth cam mechanisms, and gear-and-rack mechanisms, their equivalent four-bar linkages are slider-crank linkages or Scotch yokes. Extended work for evaluating the inequivalence of these types of direct-contact mechanisms and their equivalent four-bar linkages in jerk analysis can be undertaken in the future.
Based on the concept of equivalent linkage, some applications in the aspect of reverse engineering may be carried out, as described in Section 1. The main disadvantage of using the concept of equivalent four-bar linkage in these applications is that the kinematic analysis for the existing direct-contact mechanism is obviously limited to velocity and acceleration. According to the results shown in Section 6 and Section 7.2, for an existing direct-contact mechanism with an unknown input-output relation, the kinematic analysis for the existing direct-contact mechanism can be indirectly performed through its “equivalent six-bar linkage” to obtain the velocity, acceleration, jerk, and also ping functions of the driven link, when the geometric information for the members of the existing higher pair (such as measured coordinates or curved-fitted equations of their actual profiles, and also some measured link-length related dimensions) is known. The input-output relation (or the s-v-a-j diagrams [19,20]) for the existing direct-contact mechanism would be constructed without solving cumbersome equations for the higher-pair contact analysis [7,8,9]. When the physical properties for the members of the existing higher pair (such as their masses, centers of masses, and mass moments of inertia) are also known, dynamic force analysis for the existing direct-contact mechanism can be accordingly performed in order to evaluate the shaking forces and moments [5] and their time rate of changes in the existing direct-contact mechanism. The study for demonstrating the advantages of such applications via practical examples would be significant future work.
It must be emphasized that the kinematic equivalence between a direct-contact mechanism and its equivalent linkage is based on rigid body mechanics. If so, the kinematic equivalence should not be affected by dynamic forces (and also shaking forces and moments) in the mechanism. However, dynamic response of the driven link caused by vibrations certainly will affect the kinematic equivalence because all members in a direct-contact mechanism are actually not rigid bodies. The extent of dynamic response on affecting the kinematic equivalence could also be studied with established dynamic models [19,20] in the future.
8. Conclusions
The inequivalence of the direct-contact mechanisms and their equivalent four-bar linkages in jerk analysis has been discussed in this paper.
For the discussed planar gear mechanism with a pair of involute spur gears, the configuration of its equivalent four-bar linkage is a permanently invariant crossed quadrilateral at all instants. It is found that the equivalent four-bar linkage for the planar gear mechanism is not able to give a correct value of jerk, unless the angular velocity ratio between the two mating gears is exactly negative one (−1). For the discussed disk cam mechanism with a circular-arc cam and an oscillating roller follower, it can be successively replaced by four invariant equivalent linkages (with different constant link lengths) as the circular-arc cam rotates a complete cycle. When the circular-arc cam is in contact with its follower at a point of tangency of two adjacent circular arcs, the two equivalent four-bar linkages simultaneously existing at that instant are both not able to correctly reflect an infinite jerk of the follower, because the suddenly changed curvature of the cam profile is not considered in sudden link-length variations of the equivalent linkages. For the discussed disk cam mechanism with a double-dwell cam and an oscillating roller follower, some link lengths of its equivalent four-bar linkage continuously vary as the double-dwell cam rotates a complete cycle. The equivalent four-bar linkage for such an ordinary disk cam mechanism is still not able to give a correct value of jerk, because the continuously varying curvature of the cam profiles is not considered in continuous link-length variations of the equivalent four-bar linkage.
Subsequently, the concept of “equivalent six-bar linkage” for direct-contact mechanisms has been proposed in order to discuss the infeasibility of the equivalent four-bar linkage for jerk analysis. It is found that the equivalent six-bar linkage, rather than the equivalent four-bar linkage, of the discussed disk cam mechanism is able to give a correct value of jerk. Because the suddenly changed or continuously varying curvature of the higher pairs is not considered in sudden or continuous link-length variations of the equivalent four-bar linkage, which further leads to the inconsistency between the angular accelerations of the coupler and the contact normal, and finally results in the infeasibility of the equivalent four-bar linkage for jerk analysis of most direct-contact mechanisms. It is also found that the equivalent six-bar linkage of the discussed disk cam mechanism is still able to provide a correct value of ping. Thus, the concept of equivalent six-bar linkage could be applied to evaluate more higher-order time derivatives for most direct-contact mechanisms.
The presented case studies and discussion can give demonstrations for understanding the inequivalence of the direct-contact mechanisms and their equivalent four-bar linkages in the aspect of jerk analysis. Therefore, the results that are presented in this paper should verify that for most three-link direct-contact mechanisms, their “representative equivalent four-bar linkages” (with a coupler connecting the centers of curvature of the driving and driven links) cannot be used to perform the jerk analysis.
Author Contributions
Conceptualization, W.-T.C.; methodology, W.-T.C.; validation, W.-T.C. and D.-Y.Y.; writing—original draft preparation, W.-T.C.; visualization, W.-T.C. and D.-Y.Y., funding acquisition, W.-T.C. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the Ministry of Science and Technology of Taiwan, under Grant No. MOST-107- 2221-E-019-031.
Conflicts of Interest
The authors declare no conflict of interest.
References
- McPhate, A.J.; Daniel, L.R., Jr. A Kinematic Analysis of Four-Bar Equivalent Mechanisms for Plane-Motion Direct-Contact Mechanisms. In Proceedings of the Seventh Conference on Mechanisms, West Lafayette, IN, USA, 8–10 October 1962; pp. 61–65. [Google Scholar]
- Hall, A.S., Jr. Kinematics and Linkage Design; Waveland Press: Prospect Heights, IL, USA, 1961. [Google Scholar]
- Hartenberg, R.S.; Denavit, J. Kinematic Synthesis of Linkages; McGraw-Hill: New York, NY, USA, 1964. [Google Scholar]
- Grosjean, J. Kinematics and Dynamics of Mechanisms; McGraw-Hill: New York, NY, USA, 1991. [Google Scholar]
- Martin, G.H. Kinematics and Dynamics of Machines, 2nd ed.; McGraw-Hill: New York, NY, USA, 1982. [Google Scholar]
- Alaci, S.; Ciornei, F.C.; Amarandei, D.; Cerlincă, D.A. Upon Applying Closed Contours Method in Plane Mechanisms with Higher Pairs. In Proceedings of the 10th IFToMM International Symposium on Science of Mechanisms and Machines (SYROM 2009), Brasov, Romania, 12–15 October 2009; Vişa, I., Ed.; Springer: Dordrecht, The Netherlands, 2010; pp. 207–216. [Google Scholar]
- Litvin, F.L. Theory of Gearing; NASA Reference Publication 1212: Washington, DC, USA, 1989. [Google Scholar]
- Chang, W.T.; Wu, L.I. Computerized tolerance analysis of disk cam mechanisms with a roller follower. Eng. Comput. 2009, 25, 247–260. [Google Scholar] [CrossRef]
- Chang, W.T.; Wu, L.I. A computerized approach for tolerance analysis of disk cam mechanisms with a flat-faced follower. Trans. Can. Soc. Mech. Eng. 2009, 33, 459–486. [Google Scholar] [CrossRef]
- Wu, L.I.; Wu, S.H.; Yan, H.S. Simplified graphical determination of disk-cam curvature. Mech. Mach. Theory 1999, 34, 1023–1036. [Google Scholar] [CrossRef]
- Chang, W.T.; Wu, L.I. Mechanical error analysis of disk cam mechanisms with a flat-faced follower. J. Mech. Sci. Technol. 2006, 20, 345–357. [Google Scholar] [CrossRef]
- Wu, L.I.; Chang, W.T. Analysis of mechanical errors in disc cam mechanisms. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2005, 219, 209–224. [Google Scholar] [CrossRef]
- Chang, W.T.; Wu, L.I. Tolerance analysis and synthesis of cam-modulated linkages. Math. Comput. Model. 2013, 57, 641–660. [Google Scholar] [CrossRef]
- Chang, W.T.; Wu, L.I. A simplified method for examining profile deviations of conjugate disk cams. Trans. AsmeJ. Mech. Des. 2008, 130, 052601. [Google Scholar] [CrossRef]
- Chang, W.T.; Wu, L.I.; Liu, C.H. Inspecting profile deviations of conjugate disk cams by a rapid indirect method. Mech. Mach. Theory 2009, 44, 1580–1594. [Google Scholar] [CrossRef]
- Chang, W.T.; Yang, D.Y. A Short Note on Equivalent Four-Bar Linkages of Direct Contact Mechanisms. In Mechanisms and Machine Science—Robotics and Mechatronics, Proceedings of 6th IFToMM International Symposium on Robotics and Mechatronics (ISRM 2019), Taipei, Taiwan, 28–30 October 2019; Kuo, C.H., Lin, P.C., Essomba, T., Chen, G.C., Eds.; Springer: Cham, Switzerland, 2020; Volume 78, pp. 51–62. [Google Scholar]
- Yan, H.S. Mechanisms—Theory and Applications; McGraw-Hill: New York, NY, USA, 2016. [Google Scholar]
- Chang, W.T.; Kao, H.L.; Fang, Y.Y. Optimal Synthesis of Disk Cam Mechanisms with a Roller Follower Considering Cam Size Minimization and Rotational Balancing. In Proceedings of the 14th IFToMM World Congress (IFToMM 2015), Taipei, Taiwan, 25–30 October 2015. Paper No. PS3-012. [Google Scholar]
- Norton, R.L. Cam Design and Manufacturing Handbook, 2nd ed.; Industrial Press: New York, NY, USA, 2009. [Google Scholar]
- Rothbart, H.A. (Ed.) Cam Design Handbook; McGraw-Hill: New York, NY, USA, 2004. [Google Scholar]
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).